ai, attachment theory and simulating secure base behaviour: dr. bowlby meet the reverend bayes. dean...
Post on 20-Dec-2015
219 views
TRANSCRIPT
AI, Attachment Theory and Simulating Secure Base
Behaviour: Dr. Bowlby meet the Reverend Bayes.
Dean Petters and Everett Waters
Overview• Behavioural component of Attachment Theory • Cognitive Component of Attachment Theory• Agent Based Modelling• Future prospects
– Overlaying Bowlby’s systems with a contemporary view of interacting action controllers
– Interactions between subsystems – Bayesian mediation– Lower level components ‘shaping’ higher level components– Growing subsystems from the bottom-up as an example of cascaded
development
• Next Steps– Richer, deeper scenarios
Motivation• Attachment Theory Inspired AI
– How to constrain a cognitive/affective architecture– Attachment as an example of a high level interrupt to processing– Sloman, Minsky, Simon (1967), etc
• AI Inspired Attachment Theory– Nature of representation - Bowlby, Ainsworth, Sroufe and Waters
(1977) – from proximity to felt security– Can focussing on architectures for attachment help unify/organise
disparate empirical measures?– How is the attachment control system formed over development?
Behavioural Component of Attachment Theory
• Hospitalisation; maternal deprivation, bereavement (Bowlby 1944 onwards)
• Naturalistic study of exploration in a park (Anderson 1972) • Ganda study (Ainsworth 1967)
• The Strange Situation Procedure (Ainsworth, Blehar, Waters and Wall, 1978)
• Attachment Q sort (Waters and Deane (1985)• Measures in later childhood; adolescence; adult romantic
relationships; Adult Attachment Interview
• Secure-base scripts in adults (Waters and Waters 2006)
Strange Situation Procedure• Year long home observation• At 1 year 24 minute structured observation• 8 x 3 minute changes in status• Compare home and laboratory – 3 clusters of response
found• Secure - Type B • Insecure– Avoidant - Type A– Ambivalent/resistant – Type C– Disorganised - Type D
• Reunion not separation is key – how does infant represent carer as secure base
• Longitudinal correlations with AAI
Cognitive Component of Attachment Theory
• From ethological ‘behaviours’ to cybernetics, control systems, and hierarchical plans
• Instincts that have to be constructed; expectable environments
• Flexible repertoire direct by outcomes• Hierarchy of forms of information processing• Constructed and reconstructed through
development

Hierarchy of forms of information processing
• Reflexes• Fixed action patterns• Goal directed mechanisms• Internal Working Models• Hierarchical plans• Natural Language
• Ontogeny of this architecture; trajectories for individual differences?
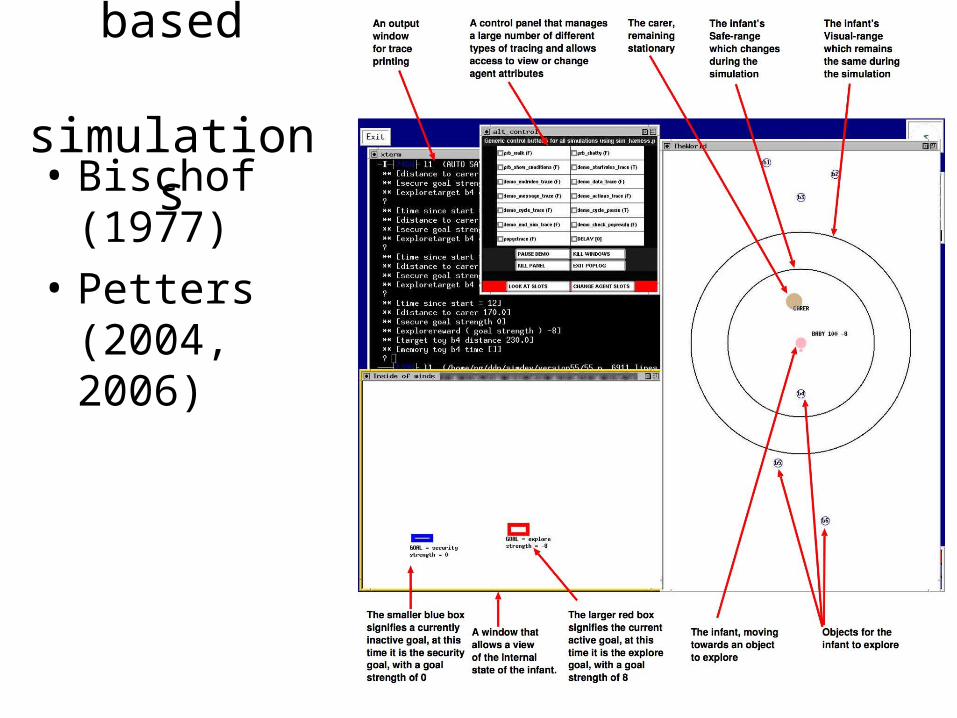
Agent based simulations• Bischof (1977)• Petters (2004,
2006)
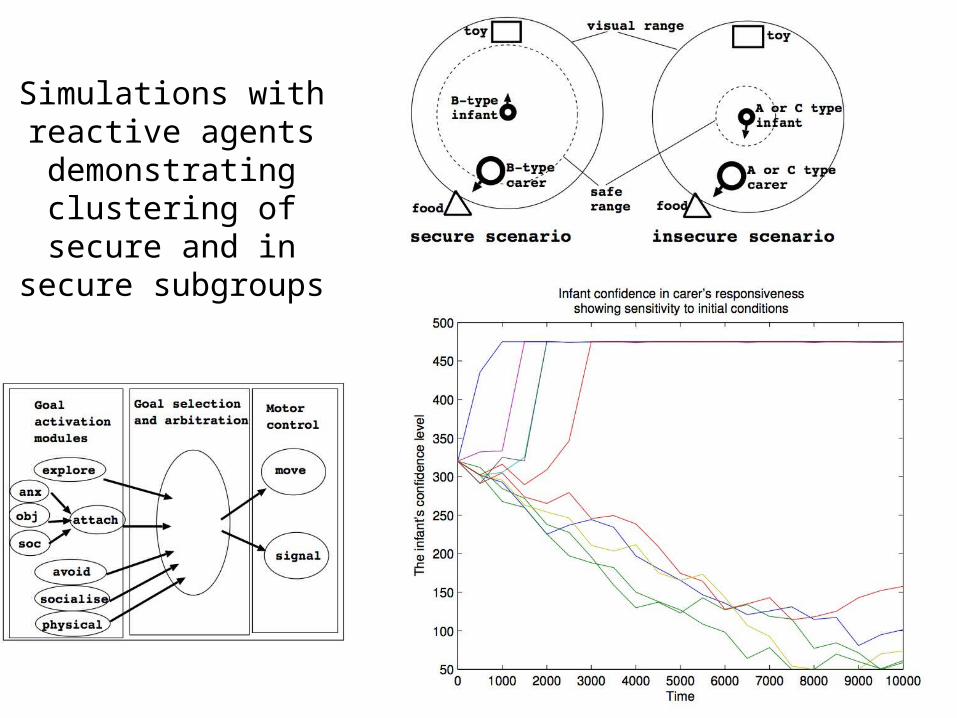
Simulations with reactive agents demonstrating
clustering ofsecure and in secure
subgroups

A hybrid architecture• Petters (2006)• Note information flow
between reactive and deliberative subsystems
• Is this really how subsystems communicate/coordinate?
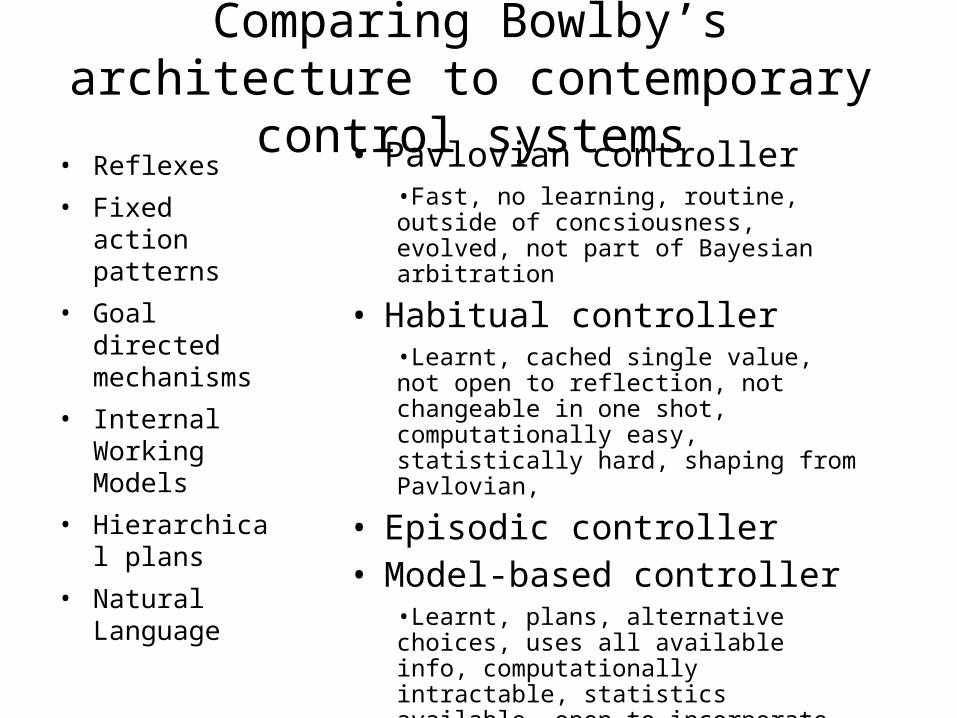
Comparing Bowlby’s architecture to contemporary control systems
• Reflexes• Fixed action
patterns• Goal directed
mechanisms• Internal
Working Models• Hierarchical
plans• Natural
Language
• Pavlovian controller•Fast, no learning, routine, outside of concsiousness, evolved, not part of Bayesian arbitration
• Habitual controller•Learnt, cached single value, not open to reflection, not changeable in one shot, computationally easy, statistically hard, shaping from Pavlovian,
• Episodic controller• Model-based controller
•Learnt, plans, alternative choices, uses all available info, computationally intractable, statistics available, open to incorporate new info in the fly(Dayan 2009, and other papers)
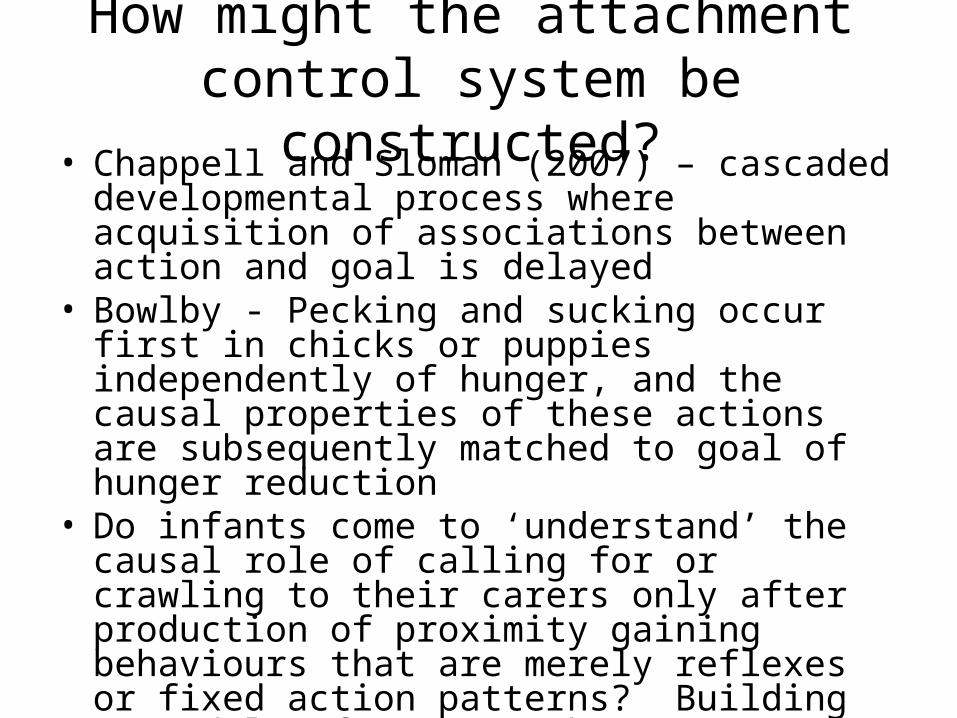
How might the attachment control system be constructed?
• Chappell and Sloman (2007) – cascaded developmental process where acquisition of associations between action and goal is delayed
• Bowlby - Pecking and sucking occur first in chicks or puppies independently of hunger, and the causal properties of these actions are subsequently matched to goal of hunger reduction
• Do infants come to ‘understand’ the causal role of calling for or crawling to their carers only after production of proximity gaining behaviours that are merely reflexes or fixed action patterns? Building up models of our attachment relationships

Conclusion and next steps• Inspiration from contemporary AI:
– To refine the description of the attachment control architecture– To add Bayesian arbitration, linking control to prediction– New sophistication in interrelations of different subsystems through
ontogeny, e.g. ‘shaping’– To move from measurement of behavioural phenomena to theories of
construction of architectures underlying phenomena through ontogeny
• New scenarios - beyond turtle-like or vehicle-like cycles of attraction and aversion- mother provides affordances in the process of "co-construction" or
"scaffolding“- “There is no such thing as a baby, only a baby and a mother” -
Winnicott (1965)