advanced optimization survey project presentation: robust optimization techniques in...
TRANSCRIPT
ROBUST OPTIMIZATION
TECHNIQUES THAT ADDRESS
UNCERTAINTY IN INTENSITY-
MODULATED RADIATION THERAPY
Phil Diette
SE 724
April 29, 2015
Outline
• Introduction
• IMRT
• Robust Management of Motion Uncertainty in Intensity-
Modulated Radiation Therapy
• Uncertainty Set
• Formulation
• Results
• Future Work
• Nonconvex Robust Optimization for Problems with Constraints
• Formulation
• Uncertainty Set
• Results
• Future Work

Introduction
• High incidence of cancer
• 1,658,370 new cancer cases are expected to be diagnosed in the
US in 2015
• 589,430 Americans expected to die of cancer in 2015
• 2/3 of cancer patients receive radiation therapy
• Intensity-modulated radiation therapy (IMRT) shown to be
beneficial

IMRT
• Precision radiation
delivery
• Conforms beam to
tumor shape and size
• Beams of radiation
delivered from chosen
angles
• Beams are made up of
beamlets whose
intensities can be
adjusted
Problem
• Radiation kills tumors!
• But… radiation also kills good, healthy tissue and organs
• Optimization problem• Minimize radiation dose to healthy tissue
• Deliver adequate radiation to tumorous tissue
• IMRT Planning• Caregivers create a radiation treatment plan for a patient‘s specific
needs
• Includes planning intensities of radiation beamlets and angles of beams
• Not accounting for uncertainty leads to• Cold spots: underdosed tumorous tissue
• Hot spots: overdosed healthy tissue
Papers
• Case #1
• T. Bortfeld, T. Chan, A. Trofimov, J. Tsitsiklis (2008) Robust
Management of Motion Uncertainty in Intensity-Modulated
Radiation Therapy. Operations Research 56(6)
• Improvements over nominal planning
• Simple robust counterpart
• Case #2
• D. Bertsimas, O. Nohadani and K. M. Teo, (2010) Nonconvex
Robust Optimization for Problems with Constraints. INFORMS
Journal on Computing 22(1):44-58
• More general approach
• Lots of computation

Case 1
• Focuses specifically on breathing motion that effects lung
tumors during radiation therapy
• A common method of addressing breathing motion used a
margin around the tumor
• Guarantee minimum dose delivered to tumor, but also delivered
more dose to healthy tissue

• Another method proposed using a motion probability
density function
• Poor performance if the exact motion pdf isn’t realized during
treatment (irregular breathing, differences in health)

Uncertainty Set
• Solution: account for uncertainty in motion pdf with upper and lower bounds
• Uncertainty set 𝑃𝑈
𝑃𝑈 = 𝑝 ∈ 𝑝 𝑥 − 𝑝 𝑥 , 𝑝 𝑥 + 𝑝 𝑥 ∀𝑥 ∈ 𝑈; 𝑝 𝑥 = 𝑝 𝑥 ∀𝑥 ∈ 𝑋\𝑈;
𝑥∈𝑋
𝑝 𝑥 = 1
Nominal pdf, p(x)
Lower bound 𝒑 𝒙
Upper bound 𝒑 𝒙

Definitions
• V: set of voxels that tissue is divided into
• A voxel is a small volume of tissue with corresponding location
• T: subset of V that contains tumorous tissue
• N: subset of V that contains non-tumor, healthy tissue
• B: set of beamlets that make up a beam
• 𝐷𝑣,𝑏: dose that voxel v receives from beamlet b
• 𝑙𝑣: prescribed dose for voxel v
• 𝑤𝑏: intensity (or weight) of beamlet b
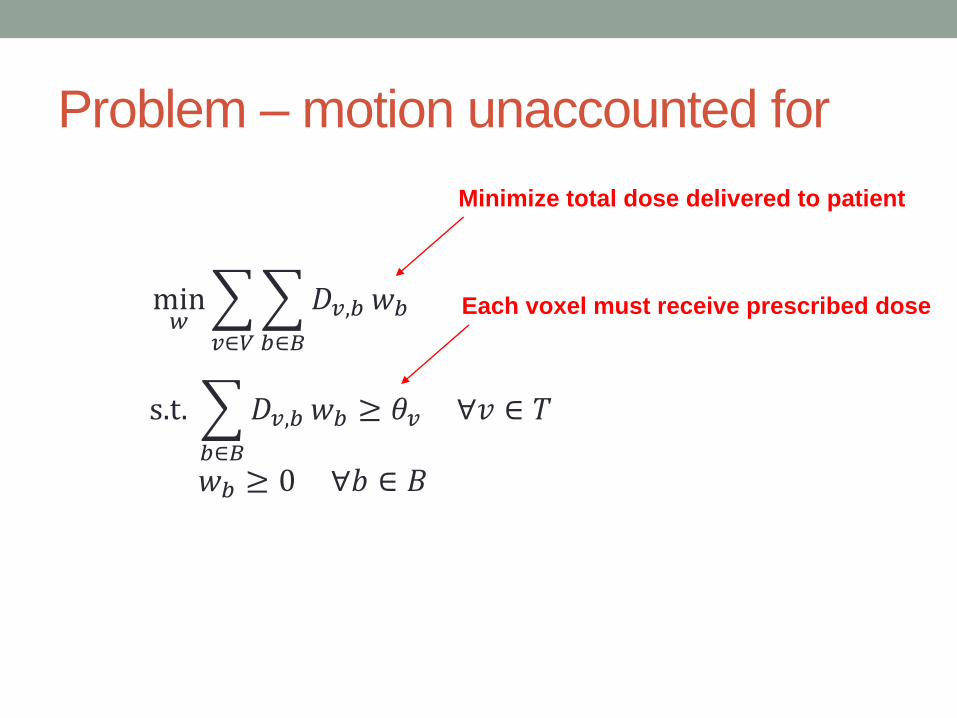
Problem – motion unaccounted for
min𝑤
𝑣∈𝑉
𝑏∈𝐵
𝐷𝑣,𝑏 𝑤𝑏
s.t.
𝑏∈𝐵
𝐷𝑣,𝑏 𝑤𝑏 ≥ 𝜃𝑣 ∀𝑣 ∈ 𝑇
𝑤𝑏 ≥ 0 ∀𝑏 ∈ 𝐵
Minimize total dose delivered to patient
Each voxel must receive prescribed dose

Nominal Formulation
min𝑤
𝑣∈𝑉
𝑏∈𝐵
𝑥∈𝑋
∆𝑣,𝑥,𝑏𝑝 𝑥 𝑤𝑏
s.t.
𝑏∈𝐵
𝑥∈𝑋
∆𝑣,𝑥,𝑏𝑝 𝑥 𝑤𝑏 ≥ 𝜃𝑣 ∀𝑣 ∈ 𝑇
𝑤𝑏 ≥ 0 ∀𝑏 ∈ 𝐵
• Account for motion with the motion pdf p(x)
• ∆𝑣,𝑥,𝑏: radiation dose delivered to voxel v, when the
anatomy is in breathing phase x, from beamlet b
Motion pdf

Robust Formulation
• Account for imperfect knowledge of motion pdf
• Robust solution: solution remains feasible for any realization of motion pdf (shallow breathing, irregular breathing, etc.)
min𝑤
𝑣∈𝑉
𝑏∈𝐵
𝑥∈𝑋
∆𝑣,𝑥,𝑏𝑝 𝑥 𝑤𝑏
s.t.
𝑏∈𝐵
𝑥∈𝑋
∆𝑣,𝑥,𝑏 𝑝 𝑥 𝑤𝑏 ≥ 𝜃𝑣 ∀𝑣 ∈ 𝑇, ∀ 𝑝 𝑥 ∈ 𝑃𝑈
𝑤𝑏 ≥ 0 ∀𝑏 ∈ 𝐵
𝑝 𝑥 − 𝑝 𝑥 ≤ 𝑝 ≤ 𝑝 𝑥 + 𝑝 𝑥 ∀𝑥 ∈ 𝑈

Robust Formulation – Finite Constraints
• Original robust formulation had infinite constraints
• Rewrite:

Final Robust Form
• Strong duality theory:

Results
• Applied to a clinical case
• Robust solution vs nominal solution
• Nominal solution: assumes no uncertainty in motion pdf
• Nominal solution led to average underdoses to tumor of 6-11%
• Robust solution worst-case realization was a 1% underdose
• Similar doses to healthy tissue
• Robust solution vs margin solution
• Margin solution assumes 100% uncertainty in motion pdf
• Robust solution delivered up 11% less radiation to left lung

Case #2
• Nonconvex Robust Optimization for Problems with
Constraints
• Example application to IMRT planning
• Robust solution: minimizes worst case costs due to
perturbations
• Iterative descent method that moves away from worst-
case errors while maintaining feasibility

Robust Nonconvex Optimization
• Definitions
• 𝒙: design vector
• Δx: implementation error
• U: uncertainty set
• 𝑈 ≔ ∆𝑥 ∈ 𝑹𝑛 ∆𝑥 2 ≤ Γ
• N: neighborhood of 𝒙
• 𝑁 ≔ {𝑥 𝑥 − 𝑥 2 ≤ Γ}

Problem
• min𝑥
𝑓(𝑥)
• Robust problem: minimize
worst-case errors
• min𝑥
max∆𝑥∈𝑈
𝑓(𝑥 + ∆𝑥)

Descent Direction
• Find descent direction away from worst case directions
• Solve following Second-Order Cone Program (SOCP)

Algorithm
• Step 0: Intitialization
• x1 arbitrary initial decision vector,
Set k:=1
• Step 1: Neighborhood
search:
• Search for worst cost neighbors
of 𝒙. Record all function
evaluations
• Step 2: Robust Local Move
• Solve SOCP
• Terminate if infeasible
• Set 𝑥𝑘+1 ≔ 𝑥𝑘 + 𝑡𝑘𝒅∗
• Set k:=k+1. Got to step 1.

Extend to Problem with Constraints
• Robust Formulation:
min𝑥
max∆𝑥∈𝑈
)𝑓(𝒙 + ∆𝒙
s.t. max∆𝑥∈𝑈
ℎ𝑗 𝒙 + ∆𝒙 ≤ 0 ∀𝑗
• Problem w/ constraints:
min𝑥
)𝑓(𝑥
𝑠. 𝑡. ℎ𝑗 𝒙 ≤ 0 ∀𝑗
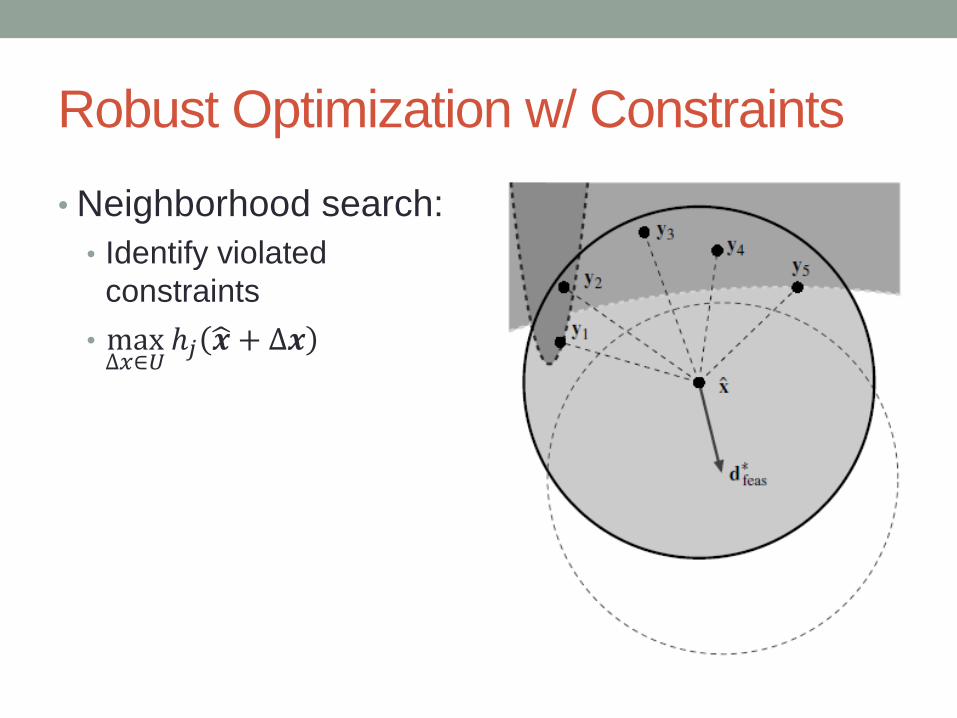
Robust Optimization w/ Constraints
• Neighborhood search:
• Identify violated
constraints
• max∆𝑥∈𝑈
ℎ𝑗 𝒙 + ∆𝒙

Robust Optimization w/ Constraints
• Robust Local Move
• 𝒙 infeasible under
perturbations:
• Step along descent
direction, 𝒅𝑓𝑒𝑎𝑠∗ , that
maximizes the angle to
𝒚𝑖 − 𝒙
• 𝒅𝑓𝑒𝑎𝑠∗ is found by solving
the following SOCP

Robust Optimization w/ Constraints
• Robust Local Move• 𝒙 feasible under
perturbations: • Search for constraint
violations just outside of neighborhood
• Step along descent direction,𝒅𝑐𝑜𝑠𝑡
∗ , found by solving the following SOCP

Algorithm Termination Criteria
• 𝒙∗ is a robust local minimum for the problem with
constraints if the following conditions apply:
• 𝒙∗ is feasible under all pertubations in the uncertainty set
• No descent direction,𝒅𝑐𝑜𝑠𝑡∗ , exists at 𝒙∗
Application to IMRT Planning
• Simultaneous optimization of beamlet intensity and beam
angle
• First paper to explore this through robust optimization
• Working with same hospital – Massachusetts General
Hospital

Nominal Problem
• Similar to previous case
• Dose, 𝐷𝑣𝑏 𝜃𝑖 , depends on beam angle
• 𝑐𝑣 penalizes important organs more than normal tissue
• Adds a constraint to limit dose to a voxel
minw,𝜃
𝑣∈𝑉
𝑖∈𝐼
𝑏∈𝐵
𝑐𝑣𝐷𝑣𝑏 𝜃𝑖 𝑤𝑖
𝑏
s.t.
𝑖∈𝐼
𝑏∈𝐵
𝐷𝑣𝑏 𝜃𝑖 𝑤𝑖
𝑏 ≥ 𝑙𝑣 ∀𝑣 ∈ 𝑇
𝑖∈𝐼
𝑏∈𝐵
𝐷𝑣𝑏 𝜃𝑖 𝑤𝑖
𝑏 ≥ 𝑢𝑣 ∀𝑣 ∈ 𝑉
𝑤𝑏𝑖 ≥ 0 ∀𝑏 ∈ 𝐵𝑖 , ∀𝑖 ∈ 𝐼
Minimize total dose delivered to patient
Ensure adequate dose
delivered to each voxel
Limit dose delivered to each
voxel

Robust Problem
• Implementation Errors: 𝜃 + ∆𝜃, 𝑤 ∗ 1 ± 𝛿
• 𝛿𝑖𝑏~𝑁 0,0.01 , ∆𝜃𝑖~ 0,
1
3
°
• 𝑈 =𝛿
0.03∆𝜃
𝛿
0.03∆𝜃
2
≤ Γ
• Robust Formulation:

Results
• Several robust solutions
were calculated
• Pareto Frontier
• Give clinicians ability to
trade-off between mean-
cost and probability of
constraint violation

Results
• Robust results compared
to a convex optimization
solution
• Fix θ
• Prob. of violation can be
high
• Convex better
• Prob of violation needs to
be low (near vital organ)
• Robust local search better
• But robust local search is
more general
Robust
local search
Convex opt

Discussion – PDF Approach
• Improvements over
existing planning
methods
• Tractable robust
counterpart
• Future Work:
• Generalize
• Explore other uncertainty
sets
• Does not account
position uncertainties
between treatment
sessions
• Multi-stage approach
• Simultaneous
optimization of beamlet
intensity and beam angle

Discussion – Local Search Approach
• Generalized approach
• Can handle non-
convexities
• Provide clinicians with
trade-offs between
robustness and mean-
cost
• Future Work:
• Robust solution took 20
hours to solve
• Simplify constraints
• Improve neighborhood
search portion of algorithm
• Incorporate ideas from
PDF approach
• Shrink uncertainty set
• Cones of uncertainty?
Questions?