acoustic pipeline inspection mind the gap · · 2012-06-25acoustic pipeline inspection mind the...
TRANSCRIPT

www.fugro.com
Acoustic Pipeline Inspection
Mind The Gap
Mike Liddell
Chief Surveyor, Fugro Survey Limited
UUVS @ Oceanology 2012
13th March 2012

www.fugro.com Date
Contents Menu
Introduction to Pipeline Inspection
The Current Toolkit
ROV & ROTV
Shallow Water Solutions
ROTV New Capabilities
Deep Water Solutions
AUV Capabilities
Reporting and Processing
Delivery of Results

www.fugro.com
Pipeline Inspection
Deployment of the Best Technical Solutions has cemented position as the
provider of pipeline inspection survey services
– Best Technical Solutions
• Best Survey Platforms
• Best Survey Sensors and Hardware
• Optimised Acquisition and Processing Software
• Integrated Data Delivery Tools
• Experienced Inspection Personnel
– Backed up by a commitment to annual training
• Overseen by dedicated Project Management
Two distinct yet complementary offerings
– ROTV based Sonar Inspection (Acoustic Pipeline Inspection)
– ROV based Visual Inspection

www.fugro.com
The Current Pipeline Inspection Toolkit
ROTV
Rapid Assessment Tool
Span Determination
Burial Status
Displacement and Debris
140 km per day
Sonar based payload
ROV
In-depth Engineering Tool
Quantitative Measurements
Span Measurements
Depth of Burial
25 km per day
Video, MBES, CP and
Pipetracker

www.fugro.com
ROTV Pipeline Inspection Pedigree
The world leaders in Acoustic Pipeline Inspection
Over 100,000 km of ROTV based Pipeline Inspection during last 20 years
Enhanced Reporting Tools to Deliver Results Fast.
Based around High Frequency Side Scan Sonar

www.fugro.com
ROV – The Complete Tool
The diverse payload and intervention capabilities of an ROV make it the
ultimate tool for IRM activities.
Interaction between ROV Pilot and Online Inspection Engineer means that
as specific areas of interest are identified vehicle can slow down and in-
depth investigation undertaken.
This ability along side the flexibility to undertake manual intervention
activities, maintenance, CP stabs etc mean that autonomous platforms can
never replace.
However there is significant scope to reduce the GAP between the “acoustic
inspection” tools and the full capability ROV.
– Optimise ROV time.
– Faster Results.
www.fugro.com
Filling the GAP
ROTV
New Payload
AUV
New Generation Vehicle

www.fugro.com
The Vessels
Optimum AUV and ROTV Mothership,
The most modern and capable Geophysical Survey Vessels,
Acoustically Quiet, Environmentally Green,
Designed for the Purpose.
Starfix.HP Starfix.G2 POSMV 320 HiPAP 500 EM302 EM710 EA600 SBP300 DP

www.fugro.com
The Shallow Water Solution - ROTV
10-200m Water Depth.
Best in Class Side Scan Sonar, Multibeam Echosounder and Inertial
Navigation Solution.
Edgetech 4200HF, Kongsberg EM3002, IXSEA ROVINS

www.fugro.com
Adding ROV Capabilities to an ROTV
Improved Navigation - IXSEA ROVINS
– High Quality Attitude Heading Reference System for MBE
– Robust Sub Sea In bottle Inertial Navigation System
– Fully integrated into ROTV
Added Multibeam Echosounder Capability
– EM3002 – Head mounted in “neutrally buoyant” hydrodynamic foam
with carbon fibre outer shell.
– SVS and Survey Depth sensor
– EM2040, Reson, R2SONIC or SAS capable
Upgrades to MacArtney Nexus MK IV Mux
– Dual 1Gbps Ethernet channels
– Plug and Play with a greater range of survey sensors.

www.fugro.com
The Deep Water Solution - AUV
10m - 3000m Water Depth
Best in Class Side Scan Sonar, Multibeam Echosounder, Sub Bottom
Profilers, Stills Camera and Inertial Navigation Solution.
Dive duration measured in Days not Hours !!!

www.fugro.com
Positioning Solution
Full USBL Aiding INS Solution
– We track the vehicle. We know where it is.
– Most importantly, It knows where it is.
– 1m Accuracy in 1000m WD
Real Time and Post Processed INS Solution
Real Time Examples 1100m Water Depth
4 m altitude camera pass over
grab sample location

www.fugro.com
The AUV Inspection Solutions – Side Scan Sonar
Taking the ROTV approach to the 3000m contour
Sophisticated Pipeline Tracking module
USBL seeded navigation solution. No issue if pipeline enters burial and no
pipeline to track. Follow database position
Two day endurance 4-5 knots (350 - 400km production per dive).
www.fugro.com
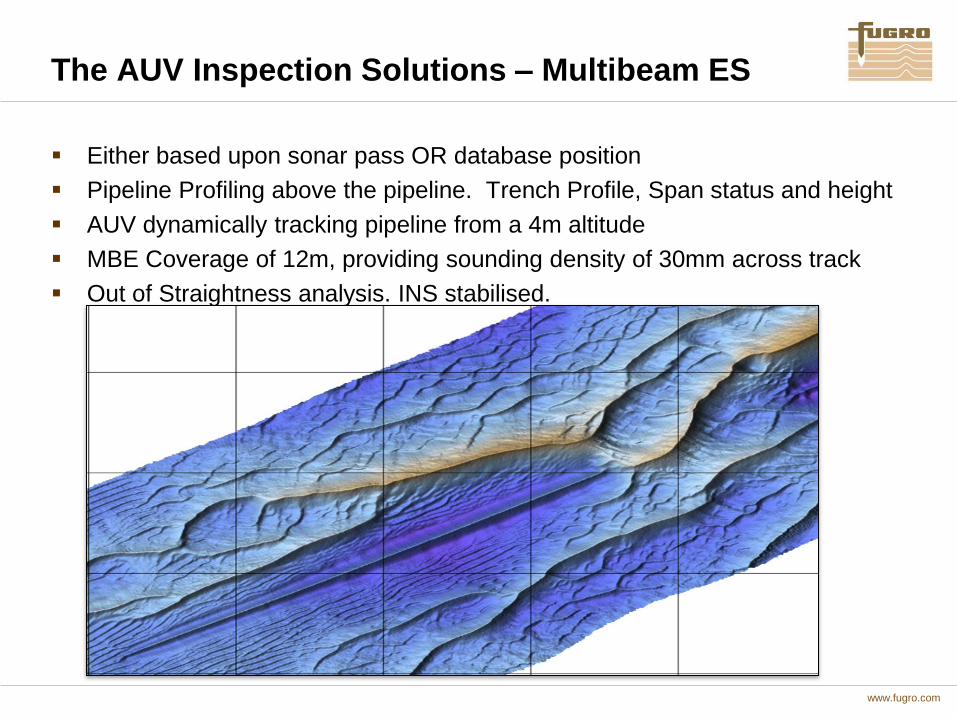
The AUV Inspection Solutions – Multibeam ES
Either based upon sonar pass OR database position
Pipeline Profiling above the pipeline. Trench Profile, Span status and height
AUV dynamically tracking pipeline from a 4m altitude
MBE Coverage of 12m, providing sounding density of 30mm across track
Out of Straightness analysis. INS stabilised.

www.fugro.com
The AUV Inspection Solutions – Stills Camera
Based upon real time pipeline tracking with MBES steering AUV
Altitude 4-6m
Stills Images at around 1Hz for full coverage along product
Create Video Slide Show

www.fugro.com
Stills Camera – Image Processing Techniques
Images can be rapidly enhanced
using Image Processing
Techniques
Optimised for product and visibility
conditions
Original Invert
Enhance

www.fugro.com
High Resolution Images

www.fugro.com
AUV Inspection Solutions – Sub Bottom Profiler
Geophysical Tool for profiling the seabed.
Transects over pipeline provide a distinctive hyperbola response from a
pipeline.
From hyperbola depth of burial can be directly measured
Tow fish or Hull mounted sensors historical not very efficient
AUV with rapid manoeuvrability becomes an efficient tool

www.fugro.com
Depth of Burial – Coverage Rates
Each Crossing is 25m long line
Objective is 25m interval, Line Turn is 40m curve
Crossing and Line Turn = 65 m @ 4.5 knots
Equates to 128 Crossing Per Hour.
– 3.2km of pipeline per hour
10m crossing Interval. 200 Crossing Per Hour
– 2.0km of pipeline per hour
50m crossing Interval. 80 Crossing Per Hour
– 4.0km of pipeline per hour
MBE data collect across each crossing to provide indication of residual
trench profile
SSS to validate there is no exposure between crossings

www.fugro.com
Processing and Reporting
Effectively have three distinct data sets (ROTV, AUV and ROV)
Need a solution that can handle these dataset in both a spatial and
temporal context
Database Driven Solution ( SQL Database)
Facility to IMPORT and EXPORT a multitude of data formats
Support for Video, XTF Sonar and Images
Full customisable Event Codes

www.fugro.com
A Universal Pipeline Data Viewer – Starfix.Review
Free utility that is provided to clients with Inspection Report
Provides Survey Data alongside Video, Sonar and Image Data
The Ability for Operator to jump to area of interest. Go to KP xxx

www.fugro.com
Event Filtering – Starfix.Review
Tools to enable Integrity Engineer to isolate features of interest
Simple Event Query Builder “Show me SPANS longer the 10m After
KP176”

www.fugro.com
Sonar Inspection Data
“Lite” GIS Functions in Plan View ( Load CAD and TIFF Images)
– Side Scan Sonar Mosaic

www.fugro.com
Summary
Acoustic Pipeline Inspection complements Visual Inspection (IRM
Campaign)
ROTV ideal shallow water API tool to 200m WD
ROTV offering improved by INS and MBE upgrade
AUV provides a practical tool for API in deep water (3000m WD)
AUV provides a totally new class of pipeline inspection tool
– Engineering Class MBE (Leak Detection)
– High Resolution Stills Camera
– Sub Bottom Profiler ( Depth of Burial)
– High productivity solution (150km + per day)
Integrated Data Processing and Reporting Tools
The Universal Data Viewer

www.fugro.com
The New Pipeline Inspection Toolkit

www.fugro.com
Thank You