accurate 3d image colour histogram transformation
TRANSCRIPT
Accurate 3D image colour histogram transformation
J�aan Morovic a,*, Pei-Li Sun a,b
a Colour and Imaging Institute, University of Derby, Kingsway House, Kingways, Derby DE22 3HL, UKb Department of Graphic Communications and Technology, Shih Hsin University, Taiwan, ROC
Abstract
Amethod for transforming an image�s 3D colour histogram to make it accurately match a predetermined target state
is described here. This method involves colour quantisation, clustering and the EMD histogram difference metric to
provide a transformation LUT between original and target histograms.
� 2002 Elsevier Science B.V. All rights reserved.
Keywords: Histogram specification; Histogram matching; Histogram transformation; 3D colour histogram
1. Introduction
Various imaging applications, such as colour
reproduction or image database retrieval algo-rithms, perform better for some images than for
others and can therefore be thought of as having
image-dependent performance. Being able to trans-
form image characteristics in a direct, arbitrary
and accurate way can then help with studying the
nature of this image-dependence of imaging ap-
plications.
To understand what impact a given imagecharacteristic (IC) has on the performance of someapplication it is useful to have two sets of images
with the following properties: first, a set of images
that differ in many characteristics (multi-IC) and
where the given application performs differently
for its different members. Second, a set that does
not differ in one characteristic (equi-IC) but does
differ in all other unrelated image characteristics
just like multi-IC. What is meant here by unrelated
image characteristics are those whose states arenot determined by the given image characteristic.
For example, changing an image�s colour gamut
also determines its lightness range but not its
content. Hence gamut and lightness range are re-
lated and gamut and content are unrelated image
characteristics. If the application then varies less
for equi-IC than for multi-IC (Fig. 1), then it is
dependent on image characteristic IC (Morovicand Sun, 1999).
The challenge in the above approach is that
equi-IC sets are difficult to populate with �natural�images, whereby what is meant here by �natural�images are those that directly result from image
capture or generation and look unperturbed or
�normal�. An alternative therefore is to generate
equi-IC sets computationally from multi-IC sets.However, to do this it is necessary to be able to
transform image characteristics in controlled ways.
*Corresponding author. Tel.: +44-1332593101; fax: +44-
1332622218.
E-mail address: [email protected] (J. Morovic).
0167-8655/03/$ - see front matter � 2002 Elsevier Science B.V. All rights reserved.
doi:10.1016/S0167-8655(02)00328-8
Pattern Recognition Letters 24 (2003) 1725–1735
www.elsevier.com/locate/patrec
Methods for transforming some image charac-
teristics in this way have already been introduced in
previous work (Morovic and Sun, 2000; Morovic
et al., 2001; Sun and Morovic, 2001) and the aimof the present paper is to give more detail about an
approach that can be used for changing an image�s3D colour histogram (Morovic and Sun, 2002).
Using this method, it is then possible to transform
a set of natural images (multi-IC) into sets of im-
ages that match in terms of the 3D colour histo-
gram image characteristic (equi-3D-histogram)
while differing in terms of unrelated characteris-tics. Such sets of test images can then be used for
studying the impact of this image characteristic
on any imaging application that exhibits image
dependent behaviour, to determine what role 3D
colour histograms play there.
The algorithm proposed in this paper has al-
ready been used for evaluating the importance of
3D image colour histograms in the context ofcross-media colour image reproduction (Sun and
Morovic, 2002). In that study two multi-IC sets
were used and equi-3D-histogram transformations
of both were obtained using the method described
in the present paper. Reproductions were then
made of all images using four different gamut
mapping algorithms (GMAs) and the accuracy of
each image�s reproductions using these algorithmswas evaluated psychophysically. The accuracy
scores of each image�s reproductions were then
compared within multi-IC and equi-3D-histogram
sets and it was found that the inter-image variation
of GMA performances was substantially reduced
for images having the same 3D colour histogram.
Hence, the ability to accurately match 3D colour
histograms using the present technique has lead toa clear understanding of the role of this image
characteristic in colour reproduction. Analo-
gously, the impact of 3D colour histograms can
also be studied in the context of any other imaging
application.
Before dealing with the 3D histogram matching
algorithm proposed here it is first useful to con-
sider what a match in terms of this characteristic
entails. For a set of images where the number ofpixels in each is the same, a 3D histogram match
means that each one of them is made up of the
same pixels and the only difference is the spatial
arrangement of these pixels. For images of differ-
ent numbers of pixels the match entails a match in
the percentage of pixels that have each a given
colour. This also means that any image from the
equi-3D-histogram set can be obtained from anyother image from this set simply by rearranging its
pixels. Finally a 3D histogram match also means a
match of any image characteristic derived from the
image colour�s distribution such as the image�sgamut, any 1D and 2D colour histograms as well
as the range or variation of image colours.
2. 3D histogram transformation
Given an original image (O) with its histogram
(HO) and a target 3D colour histogram (HT), the
aim of the algorithm described here is to assigning
colours to the pixels of O to arrive at a transfor-
mation of O that has HT. To achieve this aim the
algorithm will need to have two parts. First, amethod for finding the least expensive way of
transforming HO to HT. In other words, to have a
way involving least change to fewest of O�s col-
ours. Second, as dealing with full 8 bits/channel
images would require finding the smallest distance
between two histograms with up to 224 entries each
and be computationally very expensive, the algo-
rithm also needs to transform O into an indexed-colour version of it (IDO) to reduce the complexity
of the first part.
An algorithm developed for satisfying the
above aim will be discussed in the following sec-
tions. The heart of this algorithm is the Earth
Mover�s Distance (EMD) metric (Rubner and
Tomasi, 1998) which can be used for determining
an optimised transformation between two histo-grams by minimising the sum of cross-bin dis-
tances between them. At its basis EMD looks at
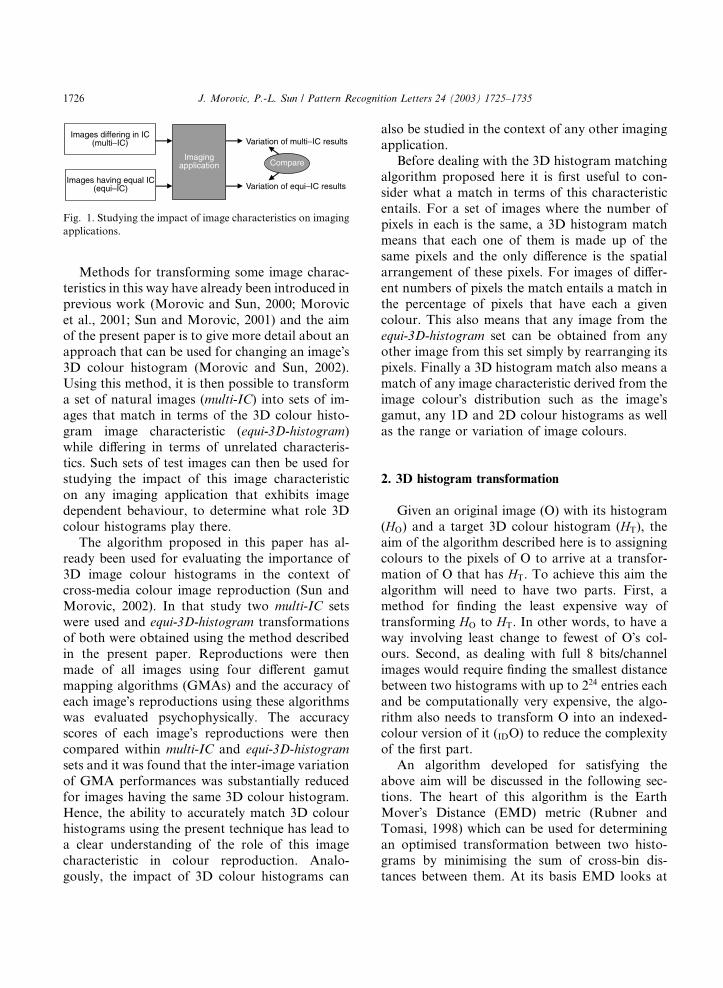
Images differing in IC(multi–IC)
Imagingapplication
Variation of multi–IC results
Compare
Variation of equi–IC resultsImages having equal IC
(equi–IC)
Fig. 1. Studying the impact of image characteristics on imaging
applications.
1726 J. Morovic, P.-L. Sun / Pattern Recognition Letters 24 (2003) 1725–1735

histogram differences as cases of the transporta-
tion problem (Hitchcock, 1941). The transporta-
tion problem deals with cases where there are
several suppliers, each with a certain amount of
some goods, who are to supply several customers,
each with a given capacity and location. The taskis then to find the least expensive flow of goods
taking into account both the amount transported
and the distance across which it is moved.
Applying this to histograms, an original histo-
gram�s values can be seen as amounts of suppliers�goods and the target histogram�s values as the
customers� demands whereby the task is to fill the
customers� demands with the suppliers� goods inthe most economical way. Histogram difference
can then be expressed in terms of how ‘‘expensive’’
it is to transform one histogram into another. The
calculation of such a histogram metric can then be
formalised as a linear programming problem with
constraints on the kind of movements allowed.
The linear programming problem can be for-
malised as follows:
workðHO;HT; F Þ ¼Xmi¼1
Xn
j¼1ðdijfijÞ ð1Þ
Here, HO and HT represent original and target
histograms with a total number of m and n bins,
respectively. dij represents the distance (i.e., DEcolour difference) between the ith colour repre-
sentative in HO and the jth colour representative inHT, and fij is the flow between the two colour
representatives. The task is to find a flow F ¼ ½fij�to minimise the overall cost work ðHO;HT; F Þsubject to the following constrains (where wOi and
wTj represent the colour frequencies in the ith and
the jth bins of histogram HO and HT, respectively):
(1) fij P 0 16 i6m; 16 j6 n
(2)Pn
j¼1 fij 6wOi 16 i6m
(3)Pm
i¼1 fij 6wTj 16 j6 n
(4)Pm
i¼1Pn
j¼1 fij ¼ minPm
i¼1 wOi;Pn
j¼1 wTj
� �
Constraint (1) allows moving ‘‘supplies’’ from
HO to HT and not vice versa. Constraint (2) limits
the amount of supplies that can be sent by the
colours in HO to their colour frequencies (wOi).Constraint (3) limits the colours in HT to receive
no more supplies than their colour frequencies
(wTj); and constraint (4) forces to move the maxi-
mum amount of supplies possible between each
pair of original and target bins. Furthermore,
using a DE colour difference formula for evaluat-
ing cross-bin distances for colour pairs from a pairof 3D image colour histograms allows for the
transformation to take into account models of
colour and colour difference perception.
The reason for using the EMD histogram dif-
ference metric in the present method is that it gives
great control over how cross-bin differences are
determined. Unlike other methods, such as exact
histogram matching––EHM (Morovic et al., 2001)or the sort-matching algorithm (Rolland et al.,
2000), it is not necessary for the bins to be in a
specific order or even for it to be possible to order
them. It means that EMD can be used for trans-
forming 3D histograms by representing them as
1D histograms and by not having to use the 1D
histogram�s bin indices for computing cross-bin
differences. Instead EMD allows for these differ-ences to be computed based on the 3D colour
coordinates corresponding to each 1D bin index.
The following are then the steps of this algo-
rithm for transforming an image to have a pre-
determined 3D colour histogram in terms of a
perceptually uniform colour space. Note also that
throughout the remainder of the paper a set of
four original images and their transformations willbe used for illustrating the algorithm. This set of
images is shown in the top-left to bottom-right
diagonal of Fig. 7 and consists of CG––a com-
puter graphic, MUS––an indoor photographic
image showing a group of musicians, SKI––an
indoor photographic image showing ski wear and
STR––an outdoor photographic image showing a
street scene.Step 1. Computing colour appearance. Given an
original 24-bit image with RGB values for its
pixels and displayed on a computer display, the
first step is to compute the colour appearance at-
tributes for each of its pixels. This will allow for
the following steps to be performed in a space that
is perceptually more uniform than the RGB space
of the display and therefore allow for all parts ofcolour space to be given similar weights. CAM97s2
(Li et al., 2000) was used here for predicting the
J. Morovic, P.-L. Sun / Pattern Recognition Letters 24 (2003) 1725–1735 1727

colour appearances of image pixels in terms of the
Jab colour space having J as a lightness predictor
and a and b as redness–greenness and yellowness–
blueness predictors, respectively. Note that a and bare orthogonal coordinates corresponding to the
polar coordinates of chroma (C) and hue angle (h)predicted by CAM97s2. As this model predicts
appearance given tristimulus values of image pix-
els, these are computed for image RGB values
using a forward characterisation model (CM) of
the display. Since the display on which images
were shown in this study is a CRT a model like the
gain-offset-gamma (GOG) one can be used (Berns,
1996).Step 2. Reducing bit-depth. Transform the Jab
image obtained form Step 1 from 24-bits (8-bits
per channel) to 18-bits (6-bits per channel) by
performing Floyd–Steinberg error diffusion (Ulich-
ney, 1993). The reason for using this algorithm is
to reduce the sample size for the next step while
preserving most of the colour information from
the original. The ðJ ; a; bÞ intervals of the result-ing 18-bit image were ð1:57; 4; 4Þ CAM97s2 units,
which corresponds to a maximum pixel-by-pixel
Euclidean colour difference (DE97s2) between the
original and reduced bit-depth images of approx-
imately 6 units. This magnitude of difference in
turn has been previously shown to be around the
perceptibility threshold of differences between
complex images (Uroz et al., 2002) and as suchresulting differences should be at most only just
perceptible.
Step 3. Indexing colours. The 18-bit image from
Step 2 is next transformed to N indexed colours (N
values of 256, 512, 1024 and 3072 were investi-
gated in this study) using a modified Foray clus-
tering algorithm (Gose et al., 1996) whereby the
resulting N colours are chosen differently for each
image. In the clustering process, colours are added
to the cluster having the smallest Euclidean dis-tance in Jab colour space. Image histograms
(IDHs) of the N indexed colour images are then
computed whereby their data structure consists of
index number, corresponding Jab values and col-
our frequency as a percentage of total number of
pixels.
Step 4. Calculating transformation between his-
tograms. EMD is used for calculating optimalcross-bin distances between the histogram of the
original image (IDHO) and the target histogram
(IDHT). The output of EMD is then an LUT in-
dicating the net-like relationship of all bins be-
tween the two histograms (Fig. 2). For example, in
Fig. 2, original pixels having the colour repre-
sented by the first bin of the original histogram
would be transformed so that one would have thefirst, three the second and two the third bin�s col-our from the target histogram. The transformation
LUT then is an m� n matrix whereby each row
represents a given index number (IOi) from the
original histogram and the colour corresponding
to it ðJOi; aOi; bOiÞ, where i 2 f1;mg and m is the
number of bins in the original histogram. The
columns represent the target histogram and eachcolumn corresponds to a given index number (ITj)from the target histogram and the colour corres-
ponding to it (JTj; aTj; bTj), where j 2 f1; ng and nis the number of bins in the target histogram. Here
binindex freq.
6
4
1
1
2
3
binindexfreq.
2
7
2
1
2
3
IDHO DHT
24
1
13
1 0 0
0 4 0
1 3 2
IDHT
IT1JT1aT1bT1
IT2JT2aT2bT2
IT3JT3aT3bT3
IO1,JO1,aO1,bO1IO2,JO2,aO2,bO2IO3,JO3,aO3,bO3
IDHO
2 7 2
1
4
6
(a) (b)
Fig. 2. (a) Relationship between original and target histogram bins computed using EMD and DE. (Shades of each bin represent its
colour and numbers above lines connecting original and target histogram bins show how many pixels of an original index are
transformed to a given target index). (b) Transformation LUT corresponding to relationship from Fig. 2a.
1728 J. Morovic, P.-L. Sun / Pattern Recognition Letters 24 (2003) 1725–1735
both m and n were equal to N . The value at (i; j) ofthe transformation LUT then shows how many
original pixels of the ith index need to be trans-
formed to the target histogram�s jth colour. To
show that the transformation represented by the
LUT will exactly result in the transformed imagehaving the target histogram, the sum of values in
the rows shows that all original colours will be
transformed and the sum of the columns shows
that the transformed colours will have the target
histogram. As such the present method guarantees
an accurate match to the target histogram. Note
that the implementation of the EMD algorithm
used in this study was based on the source codeprovided by Rubner (2000).
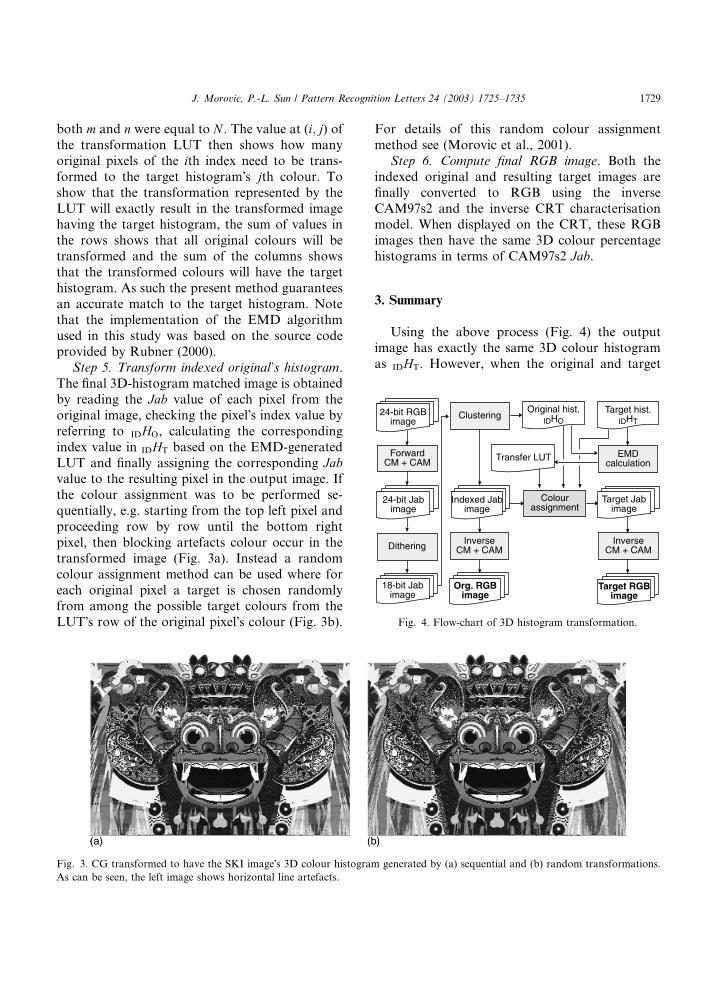
Step 5. Transform indexed original’s histogram.
The final 3D-histogram matched image is obtained
by reading the Jab value of each pixel from the
original image, checking the pixel�s index value byreferring to IDHO, calculating the corresponding
index value in IDHT based on the EMD-generated
LUT and finally assigning the corresponding Jabvalue to the resulting pixel in the output image. If
the colour assignment was to be performed se-
quentially, e.g. starting from the top left pixel and
proceeding row by row until the bottom right
pixel, then blocking artefacts colour occur in the
transformed image (Fig. 3a). Instead a random
colour assignment method can be used where for
each original pixel a target is chosen randomlyfrom among the possible target colours from the
LUT�s row of the original pixel�s colour (Fig. 3b).
For details of this random colour assignment
method see (Morovic et al., 2001).
Step 6. Compute final RGB image. Both the
indexed original and resulting target images are
finally converted to RGB using the inverse
CAM97s2 and the inverse CRT characterisationmodel. When displayed on the CRT, these RGB
images then have the same 3D colour percentage
histograms in terms of CAM97s2 Jab.
3. Summary
Using the above process (Fig. 4) the outputimage has exactly the same 3D colour histogram
as IDHT. However, when the original and target
Org. RGBimage
Target RGBimage
24-bit RGBimage
ForwardCM + CAM
Dithering
18-bit Jabimage
Original hist.IDHO
Target hist.IDHT
EMDcalculation
Transfer LUT
Colourassignment
Target Jabimage
InverseCM + CAM
Indexed Jabimage
24-bit Jabimage
Clustering
InverseCM + CAM
Fig. 4. Flow-chart of 3D histogram transformation.
Fig. 3. CG transformed to have the SKI image�s 3D colour histogram generated by (a) sequential and (b) random transformations.
As can be seen, the left image shows horizontal line artefacts.
J. Morovic, P.-L. Sun / Pattern Recognition Letters 24 (2003) 1725–1735 1729
histograms are very different, the output image can
show strong artefacts and have a more ample
power spectrum in the high spatial frequency
range. In order to reduce such artefacts and to
reduce the power of high spatial frequencies, an
attempt can be made to adjust the steps of theabove procedure. The success of the attempts to
adjust some parts of the process was assessed in
terms of a local colour spatial frequency metric
and this will be introduced next.
4. Local colour spatial frequency
After performing 3D-histogram matching, the
high spatial frequencies in the power spectrum of
the histogram-perturbed image normally have
higher amplitudes than corresponding ones in the
original. It would be ideal if the histogram-
perturbed image could maintain not only the
image content of the original image but also the
power spectrum distribution of local colour spatialfrequencies (LCSFs) in it. As the original image
changes its colours totally after histogram match-
ing, no colour difference metric can estimate the
variation of its power spectrum and a separate
metric for measuring these errors has therefore
been developed.
To evaluate the variation of the power spec-
trum, both the original and histogram-perturbedJab images are first subdivided into blocks of
16� 16 pixels and 50 units are subtracted from all
the J values. Each block is then transformed to a
16� 16 spatial frequency matrix F ðu; vÞ using a
2D fast Fourier transform (FFT) for J , a and
b, respectively. The logarithmic power spectrum
log P ðu; vÞ of F ðu; vÞ is computed and averaged
across all orientations (/) and neighbouring spa-
tial frequencies (x 1) to yield a discrete 1-D
function log P ðxÞ of radial spatial frequency x.The differences between each log PðxÞ pair of
original and perturbed images are then averaged
for the whole image and the resulting difference
function D log P ðxÞ can further be reduced to a
single value D log PJab by averaging the discrete
values of D log P ðxÞ (where x ¼ 1; 2; . . . ; 11) andfinally averaging the results of the three colour
channels (J , a, and b). As the DC component (i.e.,direct current––representing the mean value of the
16� 16 pixels) of the Fourier spectrum is insensi-
tive to the change of spatial variation, the corre-
sponding error values (D log Pð0Þ) are not used for
evaluating LCSF.
D log PJab can be regarded as a metric for eval-
uating the difference between images in terms of
LCSF. The reason for using a logarithmic scale isbecause it gives the values for each spatial fre-
quency a similar weight and is therefore more
suitable for calculating overall errors. This way of
calculating LCSF is partly based on Thomson and
Foster�s (1997) application of higher-order image
statistics. Note that zero D log PJab means that bothimages have the same distribution of spatial fre-
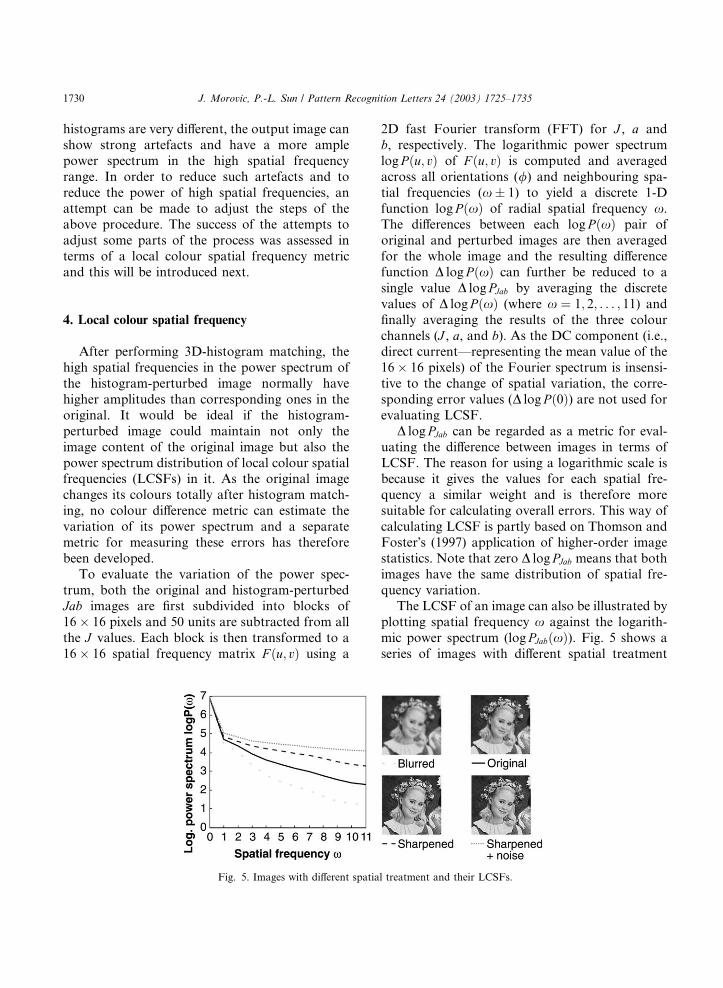
quency variation.The LCSF of an image can also be illustrated by
plotting spatial frequency x against the logarith-
mic power spectrum (log PJabðxÞ). Fig. 5 shows a
series of images with different spatial treatment
Fig. 5. Images with different spatial treatment and their LCSFs.
1730 J. Morovic, P.-L. Sun / Pattern Recognition Letters 24 (2003) 1725–1735

(blurring, sharpening and adding noise to the
original) and their corresponding LCSFs.
5. Adjusting 3D histogram matching
5.1. Choice of original and target histograms
The first factors to consider are the original and
target histograms themselves as some images
cannot be used in 3D-histogram matching without
resulting in very strong artefacts. Clearly this
would be the case when attempting a match be-
tween an image of a uniform grey wall and animage showing a colourful garden. No matter
which of these would be regarded as the original, it
would be very difficult to preserve image detail and
naturalness. Fig. 6 shows the result of matching
3D colour histograms between a business graphic
and a portrait. As can be seen, an image contain-
ing large uniform areas or non-continuous colour
distributions is not well suited as an original for3D-histogram matching. The principal problem
with transforming 3D histograms is that colour
spatial frequency tends to increase as a result of
the process. This is because neighbouring pixels of
similar colour in the original can be assigned
output colours far away from one another in Jabspace. This is particularly significant when the
colour differences between clusters in IDHT arelarger than the differences in IDHO.
5.2. Clustering and the number of indices used
As was mentioned above, a clustering technique
is used in this algorithm for generating improving
indexed-colour images. To see the effect of thisclustering, Table 1 shows the overall image colour
differences between 24-bit originals and the re-
sulting indexed-colour images. The numbers of
indices in this test were 256, 512, 1024 and 3072
and, as expected, the results showed that increas-
ing the number of indices used reduced the overall
mean-error.
5.3. Parameters affecting EMD
In the process of transforming the 3D histo-
gram of an image there are a number of para-
meters that can be adjusted and it is therefore
important to try and set them so as to reduce ar-
tefacts in the resulting histogram-transformed
images. The most important of these parametersare: (a) the maximum number of iterations; (b) the
power to which DE values are raised in EMD (i.e.
whether EMD minimises DE or DEn); (c) the
weights of DJ , DC and DH in the DE formula and
(d) the number of indices used for colour quanti-
sation.
5.3.1. Maximum number of iterations
In the EMD algorithm, the total of indexed
colour distances is minimised using an iterative
process and the maximum number of iterations
therefore plays an important role in this optimi-
sation. The artefacts of histogram-transformed
images can be reduced by increasing the maximum
number of iterations. However, the processing
becomes extremely time-consuming when thenumber of indices is large for an image. The
Fig. 6. 3D-histogram matching between a business graphic and
a portrait. (Left) Originals; (Right) histogram-matched images.
Table 1
Effect of number of indices on difference from 24-bit original
Number
of indices
Pixel-by-pixel DE97s2
Mean S.D. 95th Max.
256 3.99 2.34 11.76 27.30
512 3.64 1.96 10.02 24.36
1024 3.32 1.68 8.48 21.35
3072 2.94 1.29 6.28 18.79
J. Morovic, P.-L. Sun / Pattern Recognition Letters 24 (2003) 1725–1735 1731

maximum numbers of iterations were therefore set
to 2000, 3000, 6000 and 12,000 for the four index
numbers (256, 512, 1024 and 3072), respectively.
5.3.2. DE minimised by EMD
To evaluate the effect of varying the power ofDE in the EMD calculation, DE, DE2 and DE3 were
used for generating all the histogram matching
images by using images with 512 indexed colours
and overall results in terms of D log PJab were 0.69,0.64 and 0.68, respectively. This means that in
general the LCSF difference between original and
histogram-perturbed image pairs was somewhat
reduced by using the DE2 function. As somestudies suggest that weighted DE formulae are
preferred for gamut clipping (Katoh and Ito, 1996)
a DE2wt (1:2:1) function was also evaluated with
EMD where the weights dividing ½DJ ;DC;DH �were ½1; 2; 1�. The testing process was the same as
used above and the resulting D log PJab for DE2wt
(1:2:1) was 0.65, however, as this metric was lower
for the unweighted DE2 the latter should be used.
5.3.3. Number of indices
Different numbers of indices were also tested
(256, 512, 1024 and 3072) and this showed that
using 1024 bins gives the best result (Table 2). As
can be seen, using 3072 indexed colours did not
improve the quality of resulting images and even
though there was not much difference between 256and 1024 indices in terms of this metric, using 1024
indices improved pixel-by-pixel difference signifi-
cantly as compared with 256 indices (Table 1). A
possible reason for this is that colours of uniform
areas in the original were transformed to have a
larger number of target colours when increasing
the index numbers. Hence, the uniformity of some
areas in the original can be reduced more dra-
matically if there is a greater number of target
indexed colours assigned to them and if these in-
dexed colours are from different parts of colour
space.
6. Applying 3D histogram matching
One way of using the 3D histogram matching
technique described above is to take a set of nat-
ural images and transform each of them so as to
give it the histogram of the other images in the set.
This will result in a matrix of images as shown inFig. 7, where all the images in a given column have
the same image content (i.e. they show the same
scene) and all the images in the same row have the
same 3D colour histogram. In other words, all
images in the same row are made up of the same
pixels––the only difference between them is the
spatial arrangement of the pixels. A set like this
could, for example, be used for understandingwhat the relative importance of the 3D colour
histogram is compared to image content and this
could be seen by looking at the variation of some
imaging application�s performance for the imagesin the rows versus the columns of the matrix.
Furthermore this matrix also yields two sets of
images that each has the same image contents as
well as same 3D histograms in them. The first seton the diagonal from top left to bottom right has a
match between content and original histogram.
The second set on the other diagonal has a dif-
ferent, artificial link between content and histo-
gram. In other words, in this set each image
content is represented using the histogram of an-
other original image. Comparing these two sets
Table 2
Effect of changing number of indexed colour used in terms of D log PJab. Refer to Fig. 7, CG-to-MUS here, for instance, means the
LCSF difference between CG(org.) and CG-to-MUS images
No. of indices To-MUS To-SKI Overall
CG SKI STR CG MUS STR
256 0.40 0.12 0.64 0.63 0.95 1.05 0.633
512 0.43 0.11 0.62 0.67 0.95 1.09 0.645
1024 0.41 0.12 0.66 0.66 0.95 0.99 0.632
3072 0.40 0.33 0.85 0.75 1.12 1.16 0.766
1732 J. Morovic, P.-L. Sun / Pattern Recognition Letters 24 (2003) 1725–1735
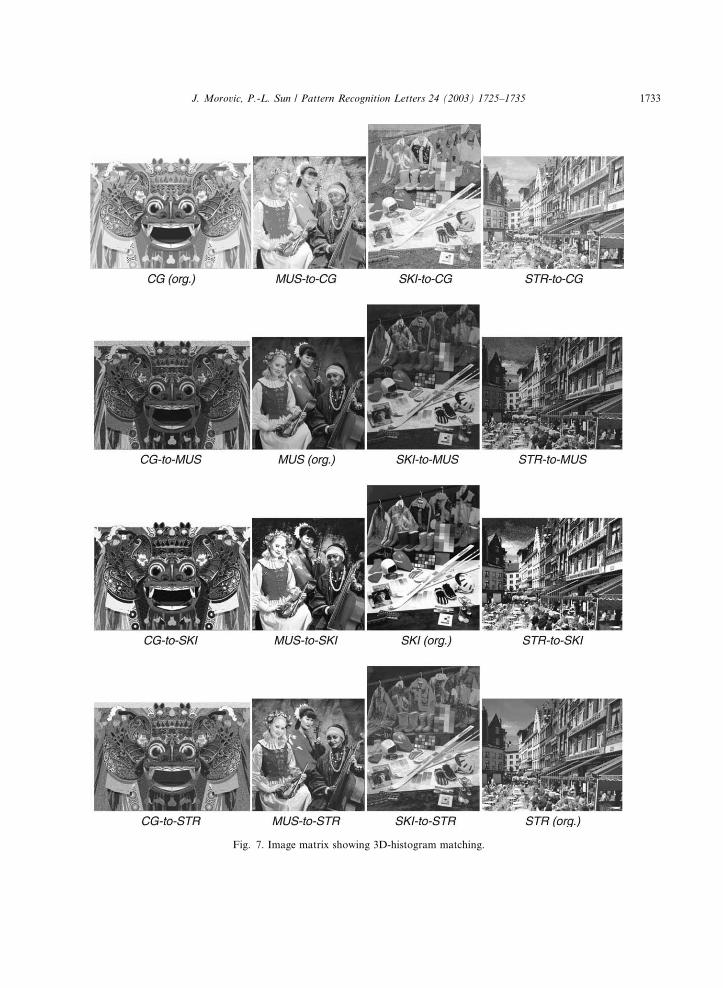
Fig. 7. Image matrix showing 3D-histogram matching.
J. Morovic, P.-L. Sun / Pattern Recognition Letters 24 (2003) 1725–1735 1733
can show whether there is any connection betweencontent and 3D histogram from the point of view
of some imaging application. In other words, if the
performance of an imaging application is the same
for corresponding members of these two sets, then
it is the 3D histogram that plays the most impor-
tant role, whereas if there are significant differences
then image content as such has more impact.
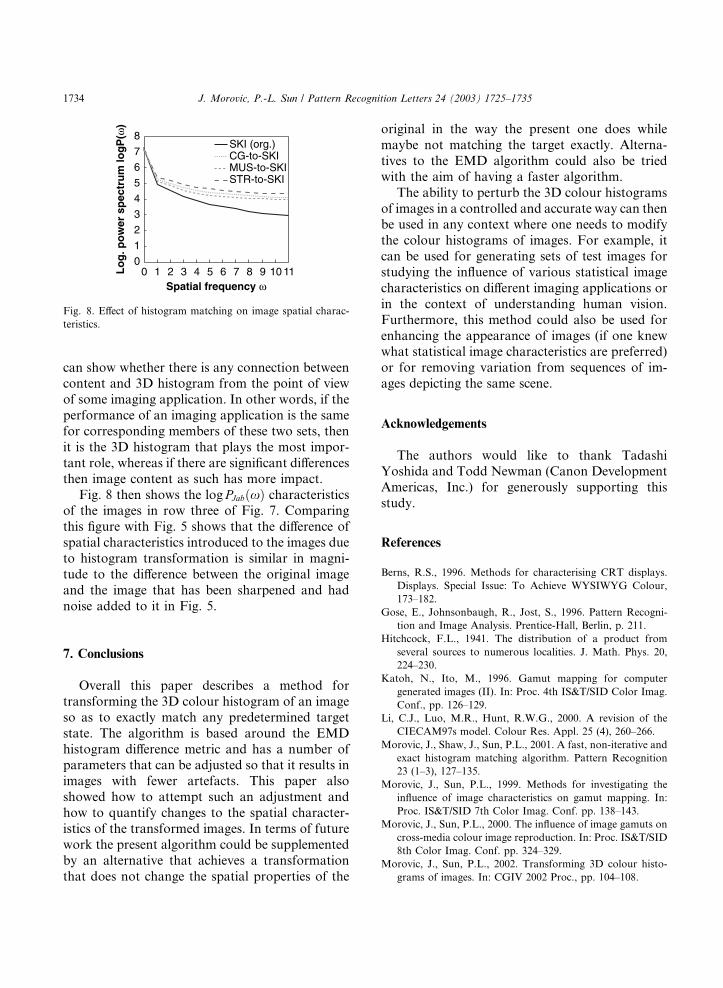
Fig. 8 then shows the log PJabðxÞ characteristicsof the images in row three of Fig. 7. Comparing
this figure with Fig. 5 shows that the difference of
spatial characteristics introduced to the images due
to histogram transformation is similar in magni-
tude to the difference between the original image
and the image that has been sharpened and had
noise added to it in Fig. 5.
7. Conclusions
Overall this paper describes a method for
transforming the 3D colour histogram of an image
so as to exactly match any predetermined target
state. The algorithm is based around the EMD
histogram difference metric and has a number ofparameters that can be adjusted so that it results in
images with fewer artefacts. This paper also
showed how to attempt such an adjustment and
how to quantify changes to the spatial character-
istics of the transformed images. In terms of future
work the present algorithm could be supplemented
by an alternative that achieves a transformation
that does not change the spatial properties of the
original in the way the present one does while
maybe not matching the target exactly. Alterna-
tives to the EMD algorithm could also be tried
with the aim of having a faster algorithm.
The ability to perturb the 3D colour histograms
of images in a controlled and accurate way can thenbe used in any context where one needs to modify
the colour histograms of images. For example, it
can be used for generating sets of test images for
studying the influence of various statistical image
characteristics on different imaging applications or
in the context of understanding human vision.
Furthermore, this method could also be used for
enhancing the appearance of images (if one knewwhat statistical image characteristics are preferred)
or for removing variation from sequences of im-
ages depicting the same scene.
Acknowledgements
The authors would like to thank TadashiYoshida and Todd Newman (Canon Development
Americas, Inc.) for generously supporting this
study.
References
Berns, R.S., 1996. Methods for characterising CRT displays.
Displays. Special Issue: To Achieve WYSIWYG Colour,
173–182.
Gose, E., Johnsonbaugh, R., Jost, S., 1996. Pattern Recogni-
tion and Image Analysis. Prentice-Hall, Berlin, p. 211.
Hitchcock, F.L., 1941. The distribution of a product from
several sources to numerous localities. J. Math. Phys. 20,
224–230.
Katoh, N., Ito, M., 1996. Gamut mapping for computer
generated images (II). In: Proc. 4th IS&T/SID Color Imag.
Conf., pp. 126–129.
Li, C.J., Luo, M.R., Hunt, R.W.G., 2000. A revision of the
CIECAM97s model. Colour Res. Appl. 25 (4), 260–266.
Morovic, J., Shaw, J., Sun, P.L., 2001. A fast, non-iterative and
exact histogram matching algorithm. Pattern Recognition
23 (1–3), 127–135.
Morovic, J., Sun, P.L., 1999. Methods for investigating the
influence of image characteristics on gamut mapping. In:
Proc. IS&T/SID 7th Color Imag. Conf. pp. 138–143.
Morovic, J., Sun, P.L., 2000. The influence of image gamuts on
cross-media colour image reproduction. In: Proc. IS&T/SID
8th Color Imag. Conf. pp. 324–329.
Morovic, J., Sun, P.L., 2002. Transforming 3D colour histo-
grams of images. In: CGIV 2002 Proc., pp. 104–108.
Fig. 8. Effect of histogram matching on image spatial charac-
teristics.
1734 J. Morovic, P.-L. Sun / Pattern Recognition Letters 24 (2003) 1725–1735

Rolland, J.P., Vo, V., Bloss, B., Abbey, C.K., 2000. Fast
algorithm for histogram matching: application to texture
synthesis. J. Electron. Imag. 9 (1), 39–45.
Rubner, Y., 2000. EMD source-code. Available from http://
robotics.stanford.edu/�rubner/emd/default.htm.Rubner, Y., Tomasi, C., 1998. Comparing the EMD with
other dissimilarity measures for color images. In: Proc.
DARPA Image Understanding Workshop, pp. 331–
339.
Sun, P.L., Morovic, J., 2001. The Influence of image histograms
on cross-media colour image reproduction. In: PICS 2001
Montr�eeal, Canada, pp. 363–367.
Sun, P.L., Morovic, J., 2002. 3D Histograms in Colour Image
Reproduction. Proc. SPIE 4663, pp. 51–62.
Thomson, M.G.A., Foster, D.H., 1997. Role of second- and
third-order statistics in discriminability of natural images.
J. Opt. Soc. Amer. A 14 (9), 2081–2090.
Ulichney, R., 1993. In: Digital Halftoning. MIT Press,
Cambridge, MA, p. 241.
Uroz, J., Morovic, J., Luo, M.R., 2002. Perceptibility thresh-
olds of colour differences in large printed images. In:
MacDonald, L.W., Luo, M.R. (Eds.), Colour Image Science
Exploiting Digital Media. John Wiley & Sons, New York,
pp. 49–73.
J. Morovic, P.-L. Sun / Pattern Recognition Letters 24 (2003) 1725–1735 1735