abstract - archivo digital upmoa.upm.es/25564/1/pfc_raul_herrero_gomez.pdf · 2014. 9. 22. ·...
TRANSCRIPT


Abstract
Realistic operation of helicopter �ight simulators in complex topographies (suchas urban environments) requires appropriate prediction of the incoming wind,and this prediction should be made in real time. Unfortunately, the wind topol-ogy around complex topographies shows time-dependent, fully nonlinear, tur-bulent patterns (i.e., wakes) whose simulation cannot be made using computa-tionally inexpensive tools based on corrected potential approximations. Instead,the full Navier-Stokes plus some kind of turbulent modeling is necessary, whichis quite computationally expensive. The complete unsteady �ow depends ontwo parameters, namely the velocity and orientation of the free stream �ow.
The aim of this MSc thesis is to develop a methodology for the real timesimulation of these complex �ows. For simplicity, the �ow around a singlebuilding (20 m×20 m cross section and 100 m height) is considered, with freestream velocity in the range 5-25 m/s. Because of the square cross section,the problem shows two re�ection symmetries, which allows for restricting theorientations to the range 0◦ ≤ α ≤ 45◦. The methodology includes an o�ine
preprocess and the online operation. The preprocess consists in three steps:
1. An appropriate, unstructured mesh is selected in which the �ow is sim-ulated using OpenFOAM, and this is done for 33 combinations of 3 freestream intensities and 11 orientations. For each of these, the simulationproceeds for a su�ciently large time as to eliminate transients. This stepis quite computationally expensive.
2. Each �ow �eld is post-processed using a combination of proper orthogonaldecomposition, fast Fourier transform, and a convenient optimization tool,which identi�es the relevant frequencies (namely, both the basic frequen-cies and their harmonics) and modes in the computational mesh. Thiscombination includes several new ingredients to �lter errors out and iden-tify the relevant spatio-temporal patterns. Note that, in principle, thebasic frequencies depend on both the intensity and the orientation of thefree stream �ow. The outcome of this step is a set of modes (vectors con-taining the three velocity components at all mesh points) for the variousFourier components, intensities, and orientations, which can be organizedas a third order tensor. This step is fairly computationally inexpensive.
3. The above mentioned tensor is treated using a combination of truncatedhigh order singular value decomposition and appropriate one-dimensional
interpolation (as in Lorente, Velazquez, Vega, J. Aircraft, 45 (2008) 1779-1788). The outcome is a tensor representation of both the relevant fre-quencies and the associated Fourier modes for a given pair of values ofthe free stream �ow intensity and orientation. This step is fairly compu-tationally inexpensive.
The online operation requires just reconstructing the time-dependent �ow�eld from its Fourier representation, which is extremely computationally inex-pensive. The whole method is quite robust.
1


Agradecimientos.
Desde que comencé la universidad en 2008 ha habido mucha gente que ha estado junto a mía lo largo de este viaje apoyándome, y por eso quiero agradecérselo con estas líneas.
Para comenzar quiero agradecer la formación inicial que recibí por parte de Elena MartínOrtega, de la Universidad de Vigo, en el ámbito de la Mecánica de Fluidos y el CFD. A micodirector Fernando Varas Mérida y mi director de proyecto José Manuel Vega de Pradapor su inmensa paciencia, comprensión e incalculable ayuda desde que empezásemos esteproyecto en Julio de 2013. Os lo agradeceré siempre.
También quiero citar a mis compañeros de viaje. Hemos estado muchos años recorriendoun largo camino en el que los obstáculos parecían multiplicarse a medida que los superába-mos, pero siempre hemos estado juntos y eso nos hizo mucho más fuertes. Tengo que dar lasgracias por haber conocido a personas tan maravillosas como lo sois vosotros. Os desearésiempre lo mejor a todos y cada uno de vosotros.
Por otro lado agradecer a toda mi familia y amigos ajenos a la universidad su apoyoincondicional durante tanto tiempo. Me gustaría mencionar especialmente a mi hermanoJavi, mi cuñada Paloma y mi pareja Lucía, que estuvieron ahí siempre, ya fuera intentandoentender las cosas que estudiaba o borrándome las fórmulas de mi pizarra. Muchas gracias.
Por último, agradecer a las dos personas que lo dieron todo por mí y las responsables deque hoy sea quien soy: mis padres. La perfecta educación que me habéis brindado durantetoda mi vida es el mejor regalo que podía recibir de nadie. Por eso, este proyecto es tanvuestro como mío.
Raúl Herrero Gómez
1

2

Índice
1 Introducción. 91.1 Formulación del problema y Antecedentes. . . . . . . . . . . . . . . . . . . . . 91.2 Objetivos del Proyecto Fin de Carrera. . . . . . . . . . . . . . . . . . . . . . . 11
2 Modelado de �ujos turbulentos no estacionario. 132.1 Turbulencia. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
2.1.1 Características del movimiento turbulento. . . . . . . . . . . . . . . . 132.1.2 Escalas del movimiento turbulento. . . . . . . . . . . . . . . . . . . . . 142.1.3 Ecuaciones del movimiento turbulento para un �ujo incompresible. . . 152.1.4 Ecuación de la energía cinética. . . . . . . . . . . . . . . . . . . . . . . 16
2.2 Modelos RANS. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 192.2.1 Analisis del modelo k − ε. . . . . . . . . . . . . . . . . . . . . . . . . . 19
2.3 Modelos URANS. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
3 Modelado numérico de �ujos turbulentos en orografías complejas conOpenFOAM. 213.1 Características generales de OpenFOAM. . . . . . . . . . . . . . . . . . . . . 21
3.1.1 Distribución de un caso de OpenFOAM. . . . . . . . . . . . . . . . . . 213.2 Generación de mallados. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 223.3 Implementación de modelos turbulentos y esquemas de resolución numérica. . 24
3.3.1 Elección del algoritmo de resolución y sus parámetros asociados. . . . 243.3.2 fvSchemes para el cálculo del caso estacionario y evolutivo. . . . . . . 253.3.3 fvSolution para el cálculo del caso estacionario y evolutivo. . . . . . . 253.3.4 Condiciones iniciales y de contorno. . . . . . . . . . . . . . . . . . . . 26
3.4 Validación (Implementación en OpenFOAM). . . . . . . . . . . . . . . . . . . 283.4.1 Datos del problema. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 283.4.2 Discusión de resultados. . . . . . . . . . . . . . . . . . . . . . . . . . . 303.4.3 Formulación del caso. . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
4 Modelado de orden reducido. 414.1 Técnica HOSVD. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
4.1.1 Singular Value Decomposition. . . . . . . . . . . . . . . . . . . . . . . 414.1.2 High Order Singular Value Decomposition. . . . . . . . . . . . . . . . 42
4.2 Aplicación al tratamiento de �ujos no estacionarios. . . . . . . . . . . . . . . 434.2.1 Análisis espectral y reorganización de la información. . . . . . . . . . . 43
4.3 Técnica HOSVD con interpolación. . . . . . . . . . . . . . . . . . . . . . . . . 54
5 Resultados. 715.1 Caso estacionario. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 715.2 Caso evolutivo. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 755.3 Cuestiones computacionales. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
6 Conclusiones. 81
3
4

Índice de �guras
1 Representación grá�ca de la transición de �ujo laminar a turbulento . . . . . 132 Representación de las �uctuaciones de velocidad (azul) en torno al valor medio
(rojo) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 153 Ejemplo de mallado sobre un avión. . . . . . . . . . . . . . . . . . . . . . . . 234 Líneas de corriente alrededor del cilindro para un cierto instante del caso no
estacionario. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 285 Caso de validación del modelo con un cilindro in�nito . . . . . . . . . . . . . 296 Coe�cientes de sustentación y de resistencia en función de la iteraciones del
algoritmo SIMPLE. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 317 Líneas de corriente sobre el cilindro en el caso estacionario. . . . . . . . . . . 328 Convergencia de las variables �uidas. . . . . . . . . . . . . . . . . . . . . . . . 339 Coe�cientes de sustentación y de resistencia en función del tiempo. . . . . . . 3410 Power Spectrum Density del coe�ciente de sustentación calculado vs. Oh
Joon Kwon. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3411 PSD de la sustentación para diferentes números de Courant. . . . . . . . . . . 3512 Isosuper�cies de viscosidad cinemática turbulenta en un instante genérico. . . 3613 Isosuper�cies de vorticidad en un instante de tiempo . . . . . . . . . . . . . . 3614 Escenario extraído de [11] . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3715 Representación del edi�cio seleccionado para la resolución de las componentes
no estacionarias de viento . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3816 Mallado en torno al edi�cio. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3917 Señal temporal de un punto del campo �uido en función de los pasos tempo-
rales (Caso 25m/s y orientación 0º). . . . . . . . . . . . . . . . . . . . . . . . 4418 Efecto del transitorio en el PSD (Caso 25m/s y orientación 45º). . . . . . . . 4419 Valores singulares para el caso de 5m/s y orientación 0º. . . . . . . . . . . . . 4520 Zoom de los valores singulares para el caso de 5m/s y orientación 0º. . . . . . 4621 Reconstrucción de la solución con diferentes números de modos (Caso 5m/s
y orientación 0º). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4622 Representación de Lp junto a los valores singulares reescalados (Caso 15m/s
y orientación 18º) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4823 .Representación de Lp junto a los valores singulares reescalados (Caso 5m/s
y orientación 0º) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4824 Reconstrucción de la velocidad (Caso 5m/s y orientación 0º). . . . . . . . . . 4925 Reconstrucción del 2 modo temporal mediante ajuste por una serie de Fourier
(Caso 15m/s y orientación 31.5º). . . . . . . . . . . . . . . . . . . . . . . . . . 5126 Reconstrucción del 4 modo temporal mediante ajuste por una serie de Fourier
(Caso 15m/s y orientación 31.5º). . . . . . . . . . . . . . . . . . . . . . . . . . 5127 Reconstrucción del 8 modo temporal mediante ajuste por una serie de Fourier
(Caso 15m/s y orientación 31.5º). . . . . . . . . . . . . . . . . . . . . . . . . . 5228 Reconstrucción de un punto del campo �uido (Caso 15m/s y orientación 9º). 5329 Reconstrucción de un punto del campo �uido (Caso 5m/s y orientación 40.5º). 5330 Valores singulares obtenidos mediante el HOSVD del �ujo medio. . . . . . . . 5531 Valores singulares para los tres primeros armónicos (componente coseno). . . 5532 Valores singulares espaciales reescalados para el �ujo medio. . . . . . . . . . . 5633 Valores singulares espaciales reescalados para la componente coseno de los 3
primeros armónicos. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5634 Modos en intensidad del tensor del �ujo medio. . . . . . . . . . . . . . . . . . 5835 Representación de los 3 primeros modos en dirección del tensor del �ujo medio. 5836 Modos 4,5, y 6 en dirección del tensor del �ujo medio. . . . . . . . . . . . . . 59
5

37 Solución del �ujo medio calculada (Caso 10m/s y orientación de 25º ). . . . . 6038 Solución del �ujo medio interpolada con 30 modos en espacio (Caso 10m/s y
orientación de 25º ). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6039 Solución del �ujo medio interpolada con 10 modos en espacio (Caso 10m/s y
orientación de 25º ). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6140 Solución del �ujo medio interpolada con 4 modos en espacio (Caso 10m/s y
orientación de 25º ). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6141 Comparación de la reconstrucción de la solución interpolada con la solución
obtenida mediante CFD (Caso 10m/s y orientación 25º). . . . . . . . . . . . . 6242 Comparación de la reconstrucción de la solución interpolada con la solución
obtenida mediante CFD (Caso 10m/s y orientación 25º). . . . . . . . . . . . . 6243 Representación de la estela turbulenta de la solución original a 50 metros del
suelo (Caso 10m/s y orientación de 25º). . . . . . . . . . . . . . . . . . . . . . 6344 Representación de la estela turbulenta de la solución interpolada a 50 metros
del suelo (Caso 10m/s y orientación de 25º). . . . . . . . . . . . . . . . . . . . 6345 Representación de la estela turbulenta de la solución original a 10 metros del
suelo (Caso 10m/s y orientación de 25º). . . . . . . . . . . . . . . . . . . . . . 6446 Representación de la estela turbulenta de la solución interpolada a 10 metros
del suelo (Caso 10m/s y orientación de 25º). . . . . . . . . . . . . . . . . . . . 6447 Representación de la estela turbulenta de la solución original a 90 metros del
suelo (Caso 10m/s y orientación de 25º). . . . . . . . . . . . . . . . . . . . . . 6548 Representación de la estela turbulenta de la solución interpolada a 90 metros
del suelo (Caso 10m/s y orientación de 25º). . . . . . . . . . . . . . . . . . . . 6549 Representación de la estela turbulenta de la solución original en una sección
oblicua (Caso 10m/s y orientación de 25º). . . . . . . . . . . . . . . . . . . . 6650 Representación de la estela turbulenta de la solución interpolada en una sec-
ción oblicua (Caso 10m/s y orientación de 25º). . . . . . . . . . . . . . . . . . 6651 Líneas de corriente del �ujo medio del caso interpolado(Caso 10 m/s y ori-
entación de 25º). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6752 Valores singulares obtenidos mediante el HOSVD del �ujo medio reescalado. . 6853 Valores singulares para los tres primeros armónicos (componente coseno) del
tensor reescalado. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6854 Valores singulares espaciales reescalados para el �ujo medio reescalado. . . . . 6955 Valores singulares espaciales reescalados para la componente coseno de los 3
primeros armónicos. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6956 Isosuper�cies de vorticidad (caso 5m/s y orientación de 0º). . . . . . . . . . . 7157 Isosuper�cie de vorticidad (Caso 5 m/s y orientación de 0º). . . . . . . . . . . 7158 Isosuper�cies de viscosidad turbulenta (Caso 25 m/s y orientación de 45º). . 7259 Isocurvas de viscosidad turbulenta (Caso 25 m/s y orientación de 45º). . . . 7260 Curvas isóbaras (Caso 5 m/s y orientación 0º). . . . . . . . . . . . . . . . . . 7361 Isosuper�cies de energía cinética turbulenta (Caso 5m/s y orientación 0º). . . 7362 Isosuper�cies de vorticidad (Caso 5m/s y orientación 0º). . . . . . . . . . . . 7463 Isosuper�cie de vorticidad (Caso 15 m/s y orientación de 27º). . . . . . . . . 7564 Isosuper�cie de vorticidad (Caso 15 m/s y orientación de 27º). . . . . . . . . 7565 Isosuper�cies de viscosidad turbulenta (Caso 25 m/s y orientación de 45º). . 7666 Isocurvas de viscosidad turbulenta (Caso 25 m/s y orientación de 45º). . . . 7667 Curvas isóbaras (Caso 25 m/s y orientación 45º). . . . . . . . . . . . . . . . . 7768 Curvas isóbaras (Caso 15 m/s y orientación 31.5º). . . . . . . . . . . . . . . . 7769 Distribución temporal de la presión sobre el suelo (Caso 15 m/s y orientación
31.5º) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 78
6

Índice de cuadros
1 Tamaño de la malla del ejemplo anterior. . . . . . . . . . . . . . . . . . . . . 232 Esquemas numéricos para el caso estacionario y evolutivo. . . . . . . . . . . . 253 Factores de relajación para la resolución de las ecuaciones del movimiento. . . 264 Nomenclatura de las fronteras del dominio �uido . . . . . . . . . . . . . . . . 275 Condiciones de contorno para las fronteras de entrada . . . . . . . . . . . . . 276 Condiciones de contorno para las fronteras de salida . . . . . . . . . . . . . . 277 Condiciones de contorno en la pared . . . . . . . . . . . . . . . . . . . . . . . 288 Dimensiones de la malla . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 299 Condiciones de la simulación . . . . . . . . . . . . . . . . . . . . . . . . . . . 3010 Características principales de la malla usada sobre el cilindro. . . . . . . . . . 3011 Dimensiones características del edi�cio . . . . . . . . . . . . . . . . . . . . . . 3812 Dimensiones del dominio computacional . . . . . . . . . . . . . . . . . . . . . 3813 Características de la malla estructurada del caso . . . . . . . . . . . . . . . . 3914 Características de la malla no estructurada . . . . . . . . . . . . . . . . . . . 3915 Distancias de re�namiento de la malla . . . . . . . . . . . . . . . . . . . . . . 3916 Características de los clústers empleados. . . . . . . . . . . . . . . . . . . . . 79
7

8

1 Introducción.
1.1 Formulación del problema y Antecedentes.
En el ámbito de los simuladores de vuelo, el correcto cálculo de la capa límite atmosféricaes el pilar fundamental para obtener un campo de velocidades y presiones acorde con larealidad. De manera habitual las componentes no estacionarias de viento se elaboran demodo sintético para superponerse al campo de vientos obtenido mediante una modi�cacióndel campo asociado a una capa límite atmosférica. Sin embargo, es claro que este enfoque,que asume un comportamiento isotrópico de las �uctuaciones y además debe elegir las fre-cuencias características exclusivamente a partir de la intensidad de viento estacionario y deltamaño del obstáculo, no resulta satisfactorio a la hora de proporcionar campos de vientosrealistas en orografías complejas.
Una alternativa para que un simulador de vuelo proporcione una buena aproximaciónde estos campos de vientos locales pasa por su simulación numérica. Pero esto tiene uninconveniente, su elevado coste computacional (incluso con �delidades moderadas) hace quesea imposible su implementación directa en el simulador de vuelo. Para la aproximaciónnumérica de la capa límite atmosférica se dispone de varios métodos, siendo los más viablesen cuanto a coste computacional y precisión los RANS (Reynolds Average Navier-Stokes) ylos LES (Large Eddy Simulation). Los más extendidos son los RANS debido a su bajo costecomputacional en comparación con los LES. Cuando el campo de velocidades se calculaa través de un modelo RANS (que modele la energía cinética turbulenta), ciertamente sedispone de alguna información adicional sobre las �uctuaciones de frecuencias más elevadasque las de interés, donde están englobadas todas aquellas que hacen sensible el pilotaje delhelicóptero. Quedaría la opción de llevar a cabo un delicado y costoso estudio de la correla-ción entre ambas escalas para el tipo de �ujos considerados.
Las simulaciones numéricas son muy costosas y hay que buscar una alternativa a la rea-lización de muchas simulaciones y a la extracción de correlaciones de ellas. Esta alternativase basa en resolver los campos no estacionarios de vientos y postprocesarlos con el �n deusar la información que albergan con un coste computacional muy bajo, e implementarlo enuna herramienta que opere en tiempor real. En la actualidad, un grupo de investigadoresdel Departamento de Fundamentos Matemáticos y del Departamento de Motopropulsión yTermo�uidodinámica, en colaboración con investigadores de la Universidad de Sevilla y laUniversidad de Vigo, que ya habían empezado a trabajar en esto, se plantea el desarrollo deun prototipo funcional de servidor de vientos en tiempo real destinado a su implementaciónen un simulador de vuelo. El desarrollo de un prototipo funcional de servidor de vientos entiempo real pasa por resolver varias di�cultades. La primera de ellas, ya solventada, es lapuesta a punto de una metodología e�ciente y semiautomática para la simulación numéricade los campos de vientos en orografías complejas, representada mediante los cálculos esta-cionarios. Para ello, en primer lugar hay que poner a punto una metodología para explotarde modo e�ciente en tiempo real estos cálculos estacionarios. Este objetivo es el contenidodel PFC de Víctor Asensio Palacios, desarrollado en paralelo a este proyecto. Por otro la-do, es necesario establecer una metodología de simulación e�ciente de las componentes noestacionarias de viento en orografías complejas y su explotación en tiempo real. Este es elobjetivo del presente proyecto �n de carrera.
Las herramientas que se emplean en este PFC pueden dividirse en dos grupos: por un la-do deben resolverse los campos de vientos no estacionarios, y para ello se emplea el softwarelibre OpenFOAM (Open Field Operation and Manipulation). Una vez han sido calculadoslos campos, es necesario extraer de ellos una información relevante, mediante un postpro-
9

cesado, para poder explotarlos en tiempo real. Para ello, las herramientas básicas que sepresentan serán una combinación de FFT, herramientas de optimización, métodos de tipoPOD/SVD/HOSVD, e interpolación.
Para entender la herramienta de postprocesado y explotación en tiempo real hay quede�nir los métodos que la componen así como la relación existente entre ellos. La des-composición en valores singulares de una matriz (SVD, Singular Value Decomposition) fuedesarrollada independientemente por Beltrami y Jordan en 1874 y está íntimamente rela-cionada con la descomposición ortogonal propia (POD, Proper Orthogonal Decomposition),inventada por Pearson [57] en 1906; dependiendo del contexto, la descomposición POD se de-nomina descomposición de Karhunen-Loeve, o también análisis de componentes principales(PCA, Principal Component Analysis). Estas dos descomposiciones se aplican a matrices,que también se pueden ver como sistemas de vectores (las �las o las columnas), o comobases de datos bidimensionales. La extensión de estas ideas a dimensión mayor que dos (esdecir, bases de datos multidimensionales, que también pueden verse como tensores) no es,en absoluto obvia. De hecho, la extensión natural de la SVD a dimensión mayor que dosconduce a un problema matemático mal planteado, relacionado con la de�nición y cálculoefectivo del rango de un tensor, que es, todavía hoy, un problema no resulto [59]. De entrevarias extensiones de la SVD a dimensión mayor [49], la descomposición en valores singularesde alto orden (HOSVD, High Order Singular Value Decomposition), debida a Tucker [33] ypopularizada más recientemente por Lathauwer et al.[10] tiene las ventajas de ser compu-tacionalmente accesible y robusta. Permite extraer modos de comportamiento, o patrones,a lo largo de cada dirección del tensor. Además, tales modos están jerarquizados, de modoque truncando la descomposición, se tiene un modelo virtual comprimido del tensor. Porotro lado, cuando el tensor resulta de discretizar parámetros o variables físicas, se tiene dosventajas. En primer lugar, las leyes físicas subyacentes conducen a redundancias que permi-ten describir la base de datos entera mediante una pequeña cantidad de modos. En segundolugar, teniendo en cuenta el origen de los datos, puede interpolarse en los modos, lo queconduce a una descripción continua de la relación funcional que representa la base de datos,para valores intermedios de las variables o parámetros. Esta idea, es decir, la combinación deestas descomposiciones con la interpolación, fue inventada por el grupo de Karen Wilcox enMIT [46,47], combinando interpolación con POD y siguiendo, en cierto modo, ideas semina-les de Sirovich [60,61], quien puso por primera vez de mani�esto la potencia de los modos detipo POD/SVD en el tratamiento de datos aerodinámicos y de otros orígenes. La extensiónde esta idea a dimensión mayor se debe a un grupo de la ETSI Aeronáuticos [50,51]. Estaidea ha demostrado su utilidad en una variedad de campos, tales como el control en tiemporeal de sistemas de ingeniería [48], la compresión de bases de datos aerodinámicos [52], elmuestreo de datos aerodinámicos [53], el diseño aeronáutico [64,65] y la construcción demodelos surrogados para el cálculo directo de magnitudes aerodinámicas [56]. En este PFCse van a utilizar precisamente estos métodos, cuya robustez está hoy bien establecida.
10

1.2 Objetivos del Proyecto Fin de Carrera.
El objetivo del presente proyecto �n de carrera es desarrollar una metodología para el cálculode componentes no estacionarias de �ujos turbulentos en geometrías complejas y su posteriorexplotación en tiempo real en un simulador de vuelo.
La estructura del PFC es la siguiente:
� Selección de un modelo de �ujo turbulento no estacionario de tipo URANS (Uns-teady RANS) adecuado para el modelado de los campos de vientos no estacio-narios en orografías complejas.
� Desarrollo de una metodología e�ciente para la resolución del modelo URANS,que deberá prestar especial atención al control del coste computacional.
� Análisis del efecto de los esquemas de integración temporal del modelo URANSsobre la selección de escalas temporales que son �ltradas o resueltas por el mo-delo.
� Estudio de modos e�cientes de almacenar y postprocesar las soluciones del mo-delo URANS de cara a su explotación en tiempo real mediante Modelos de OrdenReducido.
11

12
2 Modelado de �ujos turbulentos no estacionario.
En este apartado, se presenta unas nociones básicas sobre turbulencia y el modelo numéricoempleado para realizar las simulaciones. Se justi�cará el uso de un modelo RANS así comode las distintas aproximaciones.
2.1 Turbulencia.
2.1.1 Características del movimiento turbulento.
La mayoría de los �ujos de �uido que observamos en la vida cotidiana tienen un carácterturbulento, como el que se da alrededor de las aeronaves, edi�cios o nosotros mismos. Lacapa límite así como la estela que generan estos cuerpos son turbulentas. Otro ejemplo sepuede encontrar en las cámaras de combustión de los motores (ya sean de reacción o alter-nativos), donde las mezclas de aire y combustible deben hacerse con mucha turbulencia paracrear una mezcla homogénea.
Figura 1: Representación grá�ca de la transición de �ujo laminar a turbulento
Así las características principales de un �ujo turbulento son:
� Movimiento irregular y caótico, que parece aleatorio pero obedece a las ecuacio-nes de Navier-Stokes. Está constituido por torbellinos de diferentes tamaños cuyaenergía se va transmitiendo a las escalas más pequeñas. Debido a los esfuerzosviscosos, en las escalas pequeñas son disipadas en energía térmica, provocandoun aumento de la temperatura.
13

� Aumenta la difusividad, lo que es causa del incremento del intercambio de can-tidad de movimiento. Esto reduce o retrasa la separación de la capa límite peroaumenta tanto la resistencia aerodinámica como la transferencia de calor.
� Movimiento disipativo.
� A pesar de que posee escalas muy pequeñas, siguen siendo mucho mayores quela escala molecular, por lo que se considera como un medio continuo.
2.1.2 Escalas del movimiento turbulento.
Las escalas del movimiento turbulento pueden dividirse en dos tipos:
� Las escalas grandes, que extraen la energía del �ujo principal y a través del procesoen cascada trans�eren la energía cinética a las escalas más pequeñas. Estas escalas sondel orden de la geometría del �ujo, con velocidad y longitud v0 y l0 respectivamente.
� Las escalas más pequeñas donde tiene lugar la disipación de la energía cinética sondenominadas escalas de Kolmogorov. Las variables características son:
vη = (νε)1/4 (1)
lη = (ν3
ε)1/4 (2)
τη = (ν
ε)1/2 (3)
En el contexto de la escala de Kolmogorov, vη es la velocidad, lη la longitug de la escala y τηel tiempo característico de dicha escala. Las variables ν y ε se corresponden con la viscosidadcinemática y la disipación de energía cinética turbulenta respectivamente.
Teniendo en cuenta que ε =v3ili, se puede estimar la relación entre las escalas grandes y
las pequeñas de torbellinos en función del número de Re:
v0
vη= (Re)1/4 (4)
l0lη
= (Re)3/4 (5)
τ0τη
= (Re)1/2 (6)
Como se puede observar en las relaciones anteriores, el número de Re juega un papel muyimportante en las variables características de la turbulencia. Por ejemplo, el �ujo que se daalrededor de un coche de unos 2m de longitud que avanza a una velocidad de 90Km/h tieneun Re aproximado de 3×106. Para realizar una simulación de la escala de Kolmogorov enuna región de 1 m3 se necesitaría una malla con 4× 1014celdas. Si esto se aplica a un avióndel tamaño del Airbus A320 de deduce que este tipo de simulación se vuelve inviable, tantopor coste computacional cómo por tamaño de los datos generados.
14

2.1.3 Ecuaciones del movimiento turbulento para un �ujo incompresible.
Para el vuelo de aeronaves de ala rotatoria en zonas de orografía compleja o entornos urbanos,la consideración de �ujo incompresible es una hipótesis justi�cada, ya que las velocidadesde vuelo son muy bajas.
Las variables de un movimiento turbulento se pueden descomponer en 2 componentes,una estacionaria y otra debida a las �uctuaciones:
Figura 2: Representación de las �uctuaciones de velocidad (azul) en torno al valor medio(rojo)
pi = pi + p′i (7)
vi = vi + v′i (8)
Las ecuaciones de Navier Stokes para un �ujo incompresible son:
∂vi∂xi
= 0 (9)
ρ∂vi∂t
+ ρ∂vivj∂xj
= − ∂p
∂xi+ µ
∂2vi∂xj∂xj
(10)
El término gravitatorio se ha absorbido en el gradiente de presiones, de modo que la presiónque aparece es la presión reducida. Para este capítulo se considera la notación de índicesrepetidos de Einstein.
15

Introduciendo las relaciones (7) y (8) en las ecuaciones (9) y (10) se obtienen las ecua-ciones de la mecánica de �uidos para un �ujo incompresible turbulento:
∂vi∂xi
= 0∂v′i∂xi
= 0 (11)
ρ∂vi∂t
+ ρ∂vivj∂xj
= − ∂p
∂xi+ µ
∂2vi∂xj∂xj
+ ρ∂(−v′iv′j)∂xi
(12)
Estas ecuaciones aparecen escritas para los valores medios de la presión y velocidad, pero conla diferencia en el último término de la segunda ecuación, denominado tensor de esfuerzosaparentes de Reynolds, que sólo depende de las componentes de �uctuación turbulenta dela velocidad. Este tensor es simétrico, por lo que para poder calcular las propiedades mediasdel �ujo hay que calcular previamente los 6 esfuerzos aparentes de Reynolds que conformanel tensor.
En el movimiento turbulento, las ecuaciones de continuidad (11) y de cantidad de mo-vimiento (12), junto con las condiciones de contorno e iniciales, no bastan para determinarel movimiento medio de un �uido incompresible y con viscosidad constante, debido a lapresencia de los esfuerzos aparentes, que son desconocidos. Es preciso buscar entonces in-formación adicional, tratando de determinar la forma de dichos esfuerzos, o recurrir a laexperimentación.
2.1.4 Ecuación de la energía cinética.
La energía cinética del movimiento medio K se representa con la expresión,
K =1
2vivi (13)
y la energía cinética media de las �uctuaciones turbulentas,
k =1
2v′iv′i (14)
Por tanto, la ecuación de la energía cinética del movimiento turbulento medio queda,
ρ∂K
∂t+ ρvi
∂K
∂xj=∂(viτij)
∂xj+ ρv′iv
′jSij − Φv (15)
donde Sij = 12 ( ∂vi∂xj
+∂vj∂xi
), τij = −pδij + 2µSij − ρv′iv′j y Φv = 2µSijSij
La ecuación de la energía cinética debido a las �uctuaciones turbulentas se de�ne como,
∂k
∂t+∂vjk
∂xj= −v′iv′j
∂vi∂xj− ∂
∂xj(1
ρv′jp′ +
1
2v′iv′iv′j − ν
∂k
∂xj)− ν ∂v
′i
∂xj
∂v′i∂xj
(16)
16

� El primer término de la derecha representa la Producción (incluido el signo negativo).Se corresponde con el producto de una aceleración por una velocidad. Cuando estosdos elementos van en direcciones opuestas, el producto es positivo y se extrae energíacinética del �ujo medio, por parte de las �uctuaciones turbulentas, que es transferidaa la turbulencia.
� El segundo y tercer término representa la difusión turbulenta debido a las �uctuacionesde presión-velocidad y debido a las �uctuaciones de velocidad respectivamente.
� El cuarto término es la Difusión molecular. Es la responsable de la difusión de la energíaturbulenta debido a los mecanismos naturales de transporte molecular del �uido.
� El quinto término es la Disipación. Es responsable de la transformación de la energíacinética en energía interna en las escalas más pequeñas.
De forma reducida se puede expresar como
∂k
∂t+ vj∇k = P − ε+ ν∇2k −∇·
−→T (17)
P = −v′iv′j∂vi∂xj
=τRijρ
∂vi∂xj
(18)
ε = ν∂v′i∂xj
∂v′i∂xj
(19)
Ti =1
ρv′jp′ +
1
2v′iv′iv′j (20)
Los torbellinos más grandes contribuyen en mayor medida al término de producción que lospequeños. Las razones de esta a�rmación son,
1. Los esfuerzos de Reynolds son mayores en los torbellinos grandes.
2. Para extraer energía del �ujo principal, la escala de tiempos del torbellino y el gra-diente de velocidad del �ujo deben ser del mismo orden.
A la hora de resolver las ecuaciones de Navier-Stokes hay 3 principales posibilidades (or-denadas de forma decreciente con el coste computacional y con la precisión de la solución):DNS, LES y RANS.
La simulación DNS se basa en resolver las ecuaciones de Navier-Stokes en cada puntodel espacio sin emplear simpli�caciones. Debido a la gran cantidad de escalas presentes enun movimiento turbulento esto hace que los costes computacionales no sean asumibles enal ámbito industrial. Su uso principal suele ser académico para la validación de modelos yaproximaciones.
Los modelos LES se basan en la resolución de todas las escalas de torbellinos hasta ladenominada escala de Smagorinsky, por debajo de la cual, la turbulencia es modelizada.Tiene una gran precisión pero el coste computacional sigue siendo elevado y los tamaños de
17

malla necesarios bastante grandes.
Los modelos RANS son modelos basados en aproximar el tensor de esfuerzos de Rey-nolds. Pueden ser de 2 tipos:
� De primer orden. Se supone que los esfuerzos aparentes de Reynolds son de la mismaforma que los esfuerzos viscosos (denominado modelo de Boussinesq) pero con unaviscosidad cinemática turbulenta que hay que determinar.
−v′iv′j = νTSij (21)
Así los modelos de primer orden se clasi�can en función del número de ecuaciones que hayque resolver para obtener νT . Como ejemplos se pueden citar los modelos algebraicos (0ecuaciones, como el modelo de longitud de mezcla de Prandtl), Spallart-Allmaras(1 ecua-ción) o los modelos k − ω y k − ε(2 ecuaciones).
� De segundo orden. Modelizan términos de las ecuaciones de evolución de cada uno delos esfuerzos de Reynolds (Reynolds Stress Transport Model, RSTM) o usan dichasecuaciones de evolución para predecir los esfuerzos de Reynolds de una forma másprecisa que con el modelo de Boussinesq (Algebraic Reynolds Stress Model, ARSM).
Los modelos RANS estacionarios asumen que todas las �uctuaciones temporales se pro-ducen en escalas muy rápidas que no se quieren resolver, al tiempo que los modelos URANStratan de extraer una parte de las escalas temporales, que coincidirán con aquellas que caenen frecuencias de interés práctico y, al depender del problema particular que se resuelve,no pueden modelarse de primeras (como tratan de hacer las �uctuaciones sintéticas de altafrecuencia).
Para obtener más información sobre los modelos citados se puede consultar la bibliografía[1, 2].
18

2.2 Modelos RANS.
2.2.1 Analisis del modelo k − ε.
El modelo k − ε es el más extendido por su facilidad a la hora de resolver �ujos complejosaunque con ciertas limitaciones. La ecuación (17) proporciona la evolución de la energíacinética asociada a las �uctuaciones. Este modelo aproxima el término ∇·
−→T como νT
σk∇k .
Las ecuaciones modelizadas son las siguientes
Viscosidad cinemática
νT = Cµk2
ε(22)
Energía cinética turbulenta
∂k
∂t+ vj
∂k
∂xj=τRijρ
∂vi∂xj− ε+
∂
∂xj((ν +
νTσk
)∂k
∂xj) (23)
Tasa de energía turbulenta disipada ε
∂ε
∂t+ vj
∂ε
∂xj= Cε1
ε
k
τRijρ
∂vi∂xj− Cε2
ε2
k+
∂
∂xj((ν +
νTσε
)∂ε
∂xj) (24)
Coe�cientes de cierre
Cε1 = 1,44 Cε2 = 1,92 Cµ = 0,09 Cε1 = 1,44 σk = 1 σε = 1,3 (25)
El modelo k − ε tiene 2 debilidades principales:
� Sobrepredice el esfuerzo cortante en zonas con gradiente adverso de presión debido aque la escala de longitudes es muy grande (hay poca disipación).
� Requiere modi�cación en zonas cercanas a la pared.
Otro modelo similar al k−ε es el modelo k−ω. Se basa en estimar la viscosidad turbulentacomo una función de la energía cinética turbulenta k y la tasa de disipación de la energíacinética turbulenta especí�ca ω. Ambos métodos asumen la hipótesis de que las �uctuacionesde presión provocadas por los torbellinos transmiten la energía cinética desde las zonas conalta turbulencia a zonas con una intensidad turbulenta menor mediante un proceso difusivo.La relación entre ω y ε es
ω =ε
Cµk(26)
El modelo k − ω presenta mejores propiedades en la descripción del �ujo en zonas cercanas
19

a la pared y el desprendimiento de la capa límite.
La combinación de los dos modelos descritos antes originan el modelo SST (Shear StressTransport). Se basa en combinar el modelo k − ω en la zona interior de la capa límite, y elk − ε en la zona exterior de la capa límite y fuera de ella.
2.3 Modelos URANS.
Una alternativa a los modelos LES es elUnsteady Reynolds Averaged Navier-Stokes (URANS).La característica de los modelos URANS es que la longitud de escala turbulenta no estádeterminada por la malla, mientras que en el método LES sí. Los URANS emplean la des-composición de Reynolds
v(t) =1
2T
t+T�
t−T
v(t)dt, v = v + v′′ =< v > +v′ + v′′ (27)
La velocidad en este caso se descompone en dos elementos: un campo de velocidades resuel-tas (v) y unas �uctuaciones modeladas (v′′). A su vez, las velocidades resueltas se puedendescomponer en dos elementos más: una parte promediada (< v >) y unas �uctuacionesresueltas (v′).
< v > Valor del �ujo estacionario (Promedio temporal para un intervalo T −→∞)
v′ Fluctuación resuelta
v′′ Fluctuación modelada
Las ecuaciones que se emplean en este método son las mismas que en los modelos RANS,descritas en el apartado 2.2, con la salvedad de que se retiene el término temporal en laresolución de las ecuaciones.
La primera pregunta que se puede plantear sobre los métodos URANS es qué modelos deturbulencia proporcionan una buena aproximación en las soluciones. Como en los casos ante-riores, depende del tipo de �ujo que se quiera estudiar. En el caso de este PFC, las super�ciesque intervienen en la resolución son complejas (rascacielos, aeropuertos, altimetrías compli-cadas...) y tienen una gran cantidad de desprendimiento de vórtices. El desprendimientoes más facilmente predecible en cuerpos angulosos como tales, pues el punto de despren-dimiento se calculará bien porque coincide con los ángulos. Por otro lado, en relación conla disipación de las �uctuaciones, el modelo k − ε proporciona mucha disipación modelada,lo que amortigua las �uctuaciones que se resuelven. La razón por la que las �uctuacionesturbulentas no son amortiguadas por el modelo es porque el despredendimiento de vórticeses muy grande [1]. Además de esto, se debe asegurar que tampoco el esquema numérico deintegración temporal que se emplee amortigua estas �uctuaciones. Éste último apunte sediscutirá en el capítulo siguiente.
20
3 Modelado numérico de �ujos turbulentos en orografíascomplejas con OpenFOAM.
3.1 Características generales de OpenFOAM.
OpenFOAM es una herramienta destinada a la simulación numérica basada en esquemasde volúmenes �nitos, orientada de forma especial a la simulación numérica de mecánica de�uidos (CFD).
Es capaz de resolver �ujos de todo tipo (ej. �ujos laminares, turbulentos, compresibles,con transferencia de calor...), así como otros campos como problemas de electromagnetismo,resistencia de materiales, etc.
La ventaja de este software es que es libre y programado en C++, aunque una de lasmás funcionales es su capacidad de ejecutarse en paralelo.
Las aplicaciones de OpenFOAM se pueden dividir en 2 categorías:
� Solvers. Están creados para resolver un problema especí�co (ej. simpleFoam resuelveun �ujo turbulento estacionario).
� Utilities. Están creadas para llevar a cabo tareas de manipulación de datos, tanto pre-como post-procesado de datos (ej. la utility llamada vorticity genera el campo de vor-ticidad a partir de la solución de velocidad obtenida).
El hecho de que sea un código libre y escrito en un lenguaje común como C++ hace quetanto solvers como utilities puedan ser generados por cualquier usuario con ciertos conoci-mientos y el resto de personas puedan utilizarlos.
3.1.1 Distribución de un caso de OpenFOAM.
La distribución de archivos y carpetas de una simulación es estándar. Las carpetas queconforman un caso son
� 0. Esta carpeta contiene los archivos con las condiciones iniciales y de contorno dela simulación. En el caso de usar un modelo k − ε, los archivos de condiciones quehay que meter son para la presión (p), velocidad (U), energía cinética turbulenta (k),disipación de la energía cinética turbulenta (ε) y viscosidad turbulenta (νt). En el casode caso de que la entrada sea una capa límite atmosférica deberá llevar a su vez unacarpeta llamada include donde se añadirán 2 archivos más, llamados InitialConditionsy ABLConditions. Estos archivos de texto contienen las variables que determinarán lacapa límite atmosférica. En el caso de la viscosidad cinemática turbulenta se le imponeuna condición inicial y de contorno aunque no son necesarias, ya que es calculada conla expresión (22). El hecho de ponerlo así genera un archivo para cada solución en elque almacena el valor de νten todo el campo �uido.
� constant. Contiene tanto �cheros de texto como directorios. Los archivos que hay son
� RASProperties se �ja el modelo de turbulencia que se va a emplear así como laactivación de la turbulencia.
21

� transportProperties se muestran los valores de las constantes que intervienen enlas ecuaciones de Navier-Stokes, en este caso será el valor de la viscosidad cine-mática del aire (ν).
� turbulenceProperties se selecciona el modelado de la turbulencia, en este caso laopción es RASModel.
A parte de estos �cheros de texto, también contiene 2 directorios
� triSurface. Contiene los archivos STL con las geometrías del problema.
� polyMesh. Inicialmente contiene el archivo blockMeshDict, con el que se genera lamalla estructurada que sirve de base para generar el mallado no estructurado.
� system. Contiene los archivos
� controlDict. En este archivo se especi�ca el solver que se va a emplear, así comovariables de control del mismo.
� fvSchemes. Abarca los esquemas numéricos que se emplean en la simulación.
� fvSolution. Comprende los solver que emplea cada variable. Dicho solver se re�ereal método de resolución de los sistemas de ecuaciones lineales que resultan de ladiscretización numérica de las ecuaciones.
� snappyHexMeshDict. Genera la malla no estructurada.
� Otros.
3.2 Generación de mallados.
A la hora de obtener la solución númerica del campo �uido sobre una orografía compleja sedebe prestar especial atención a la malla. No debe contener celdas muy grandes en zonas deestela ni elementos sin una ortogonalidad mínima, lo que puede causar problemas de con-vergencia (ej. al haber celdas grandes, OpenFOAM intenta resolver estructuras turbulentasmás pequeñas que el tamaño de celda y así se originan inestabilidades numéricas).
Para la generación de mallados en OpenFOAM se disponen de 2 utilities:
� blockMesh. Genera una malla cartesiana sobre un paralelepípedo de referencia.
� snappyHexMesh. Genera la malla no estructurada del caso a partir de la malla car-tesiana generada con blockMesh. Esta utility es una herramienta muy potente puespermite generar mallas tridimensionales que contienen hexaedros y hexaedros dividi-dos automáticamente desde super�cies con geometrías trianguladas en formato STL(Stereolithography format). La malla se adapta a la super�cie tras varias iteracionesde re�namiento partiendo desde la malla original.
22

En el momento de generar la malla no estructurada con snappyHexMesh hay que teneren cuenta todas las posibilidades que nos brinda. Para emplear esta utility hay que generarun diccionario, que se llamará snappyHexMeshDict cuyo formato es genérico para cualquiercaso.
En el campo �uido hay zonas que tienen un interés mayor que otras, como pueden serzonas de estela de los edi�cios o zonas cercanas a la pared. Esto es así porque a mayorre�namiento de estas zonas, mejor se captará el carácter turbulento del movimiento y lasestructuras turbulentas presentes en el movimiento.
Las zonas de re�namiento pueden hacerse de varias maneras con snappyHexMesh, desdela adición de capas con un coe�ciente de expansión entre la primera y la última, hasta laselección de zonas especí�cas, ya sea mediante distancia a los objetos o �cajas� de re�na-miento. En este caso, se ha empleado una técnica de mallado en función de la distancia alos edi�cios ya que reduce el número de celdas necesarias y tiene una mayor ortogonalidadque la malla generada mediante adición de capas. Este método de mallado es muy robustoy permite ser aplicado a cualquier elemento distinto de una orografía compleja, como elpresentado a continuación
Figura 3: Ejemplo de mallado sobre un avión.
Tamaño de malla cartesiana 85x36x16mNúmero de celdas malla cartesiana 100000
Número de celdas malla �nal 1653086Nº celdas 1er nivel de re�namiento 271758Nº celdas 2do nivel de re�namiento 1336918
Nº celdas sin re�namiento 44410
Cuadro 1: Tamaño de la malla del ejemplo anterior.
23

3.3 Implementación de modelos turbulentos y esquemas de resolu-ción numérica.
Este proyecto consta de dos partes bien diferenciadas dentro de la parte de CFD, el cálculode la solución estacionaria y de la solución evolutiva.
La elección del solver lineal es la última etapa en la discretización numérica que, además,sólo afecta (salvo que se elija muy mal) a los tiempos de cálculo, pero no a la calidad dela solución numérica (que depende de la malla y la aproximación de los �ujos) ni a laconvergencia del algoritmo de cálculo (que depende del iterante inicial y los parámetros derelajación). Debido a esto, la distribución del capítulo es la siguiente
1. Elección del algoritmo de resolución y sus parámetros asociados.
2. fvSchemes para el cálculo del caso estacionario y evolutivo.
3. fvSolution para el cálculo del caso estacionario y evolutivo.
3.3.1 Elección del algoritmo de resolución y sus parámetros asociados.
En el caso del cálculo del estacionario se selecciona el algoritmo SIMPLE [4] en el archivoControlDict mediante el solver simpleFoam, destinado al cálculo de la solución estacionariade un �ujo turbulento incompresible. Los parámetros asociados a este algoritmo son
� Factores de relajación (relaxationFactors). Éste parámetro se encuentra en el ar-chivo fvSolution. Se escogen los valores de 0.3 para p,k, ε y de 0.7 para U.
� Correcciones de no ortogonalidad (nNonOrthogonalCorrectors). Se �jan el paráme-tro en 6.
� Criterio de convergencia (residualControl). Éste parámetro, perteneciente a fvSo-lution, decide cuando se detiene el cálculo iterativo de la aproximación del problemaestacionario. Su valor para U,k y ε es de 1× 10−3 mientras que para p es de 5× 10−3.
En el caso del evolutivo se selecciona el algoritmo PIMPLE en el archivo ControlDictmediante el solver pimpleFoam. A continuación se describe su funcionamiento [4]
1. Al principio del paso temporal, pimpleFoam aplica el algoritmo PISO a las variablesacopladas presión-velocidad, típicamente con dos bucles del PISO, y resuelve las ecua-ciones de transporte para las variables turbulentas.
2. Si el parámetro de control cumple nOuterCorrectors>1, el algoritmo vuelve atrás yrealiza otra integración (como la del apartado 1), pero usando esta vez como valoresiniciales los obtenidos en la integración anterior.
3. El punto 2 se repite tantas veces como indique el valor de nOuterCorrectors. Si elvalor de este parámetro es 1, el algoritmo PIMPLE funciona como PISO.
24
Los parámetros asociados a este algoritmo son
� Factores de relajación (relaxationFactors). Éste parámetro se encuentra en el ar-chivo fvSolution.
� Correcciones de no ortogonalidad (nNonOrthogonalCorrectors). Está ubicado en fv-Solution y se �ja su valor en 6.
� Criterio de convergencia (residualControl). Éste parámetro, perteneciente a fvSo-lution, decide cuando se detiene el cálculo iterativo de la aproximación del problemaestacionario. Su valor para U,k y ε es de 1× 10−3 mientras que para p es de 5×10−3.
� Control de iteraciones de las ecuaciones RANS (nOuterCorrectors). Está ubicado enfvSolution y se �ja su valor en 1.
� Número de iteraciones de la ecuación de presión (nCorrectors)
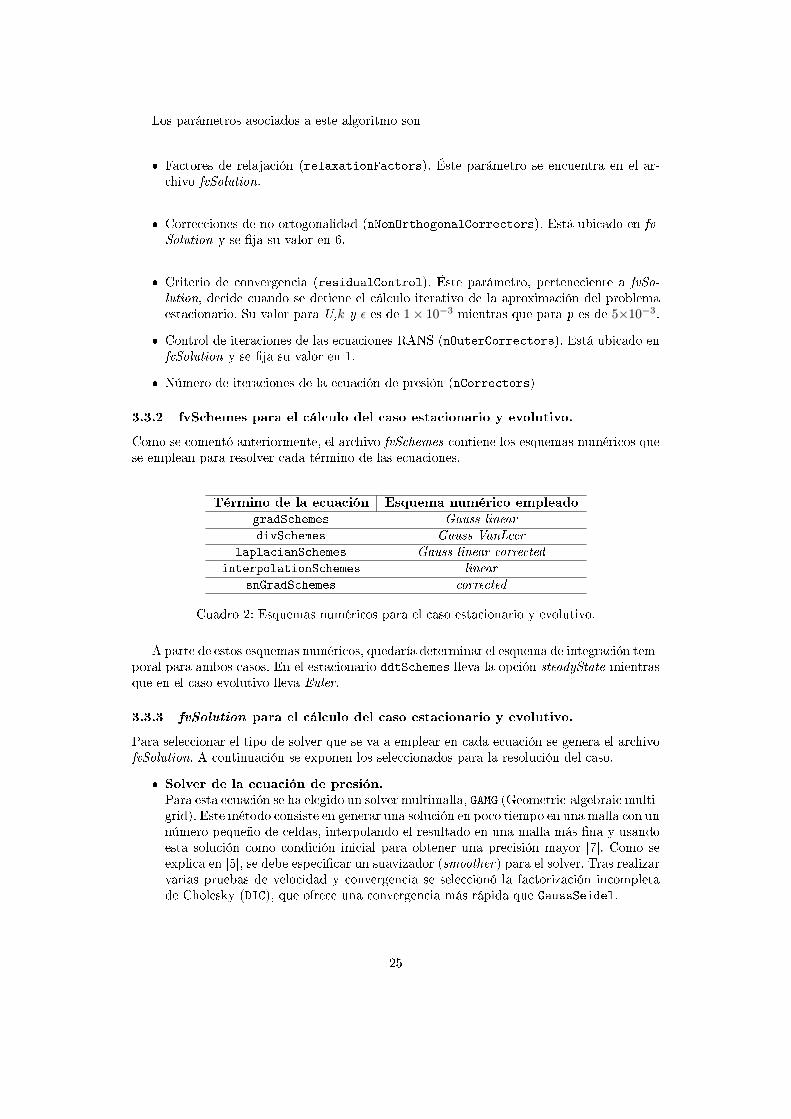
3.3.2 fvSchemes para el cálculo del caso estacionario y evolutivo.
Como se comentó anteriormente, el archivo fvSchemes contiene los esquemas numéricos quese emplean para resolver cada término de las ecuaciones.
Término de la ecuación Esquema numérico empleadogradSchemes Gauss lineardivSchemes Gauss VanLeer
laplacianSchemes Gauss linear correctedinterpolationSchemes linear
snGradSchemes corrected
Cuadro 2: Esquemas numéricos para el caso estacionario y evolutivo.
A parte de estos esquemas numéricos, quedaría determinar el esquema de integración tem-poral para ambos casos. En el estacionario ddtSchemes lleva la opción steadyState mientrasque en el caso evolutivo lleva Euler.
3.3.3 fvSolution para el cálculo del caso estacionario y evolutivo.
Para seleccionar el tipo de solver que se va a emplear en cada ecuación se genera el archivofvSolution. A continuación se exponen los seleccionados para la resolución del caso.
� Solver de la ecuación de presión.Para esta ecuación se ha elegido un solver multimalla, GAMG (Geometric-algebraic multi-grid). Este método consiste en generar una solución en poco tiempo en una malla con unnúmero pequeño de celdas, interpolando el resultado en una malla más �na y usandoesta solución como condición inicial para obtener una precisión mayor [7]. Como seexplica en [5], se debe especi�car un suavizador (smoother) para el solver. Tras realizarvarias pruebas de velocidad y convergencia se seleccionó la factorización incompletade Cholesky (DIC), que ofrece una convergencia más rápida que GaussSeidel.
25

� Solver de la ecuación de cantidad de movimiento y k − ε.El solver que se ha seleccionado es el PBiCG (Preconditioned (bi-)conjugate gradient).El preconditioner que se ha elegido para combinarse con el solver es la factorizaciónincompleta LU (DILU).
A parte de los elementos citados anteriormente, existe un segundo subdiccionario en elarchivo fvSolution donde se ubican los factores de relajación. El uso de la relajación en lassoluciones es una técnica que se emplea para mejorar la estabilidad del cálculo, en especialen el cálculo de problemas estacionarios. La relajación en el cálculo iterativo de una variablev lo que hace para calcular v(n+ 1) a partir de v(n) , obtener primero el valor de v(n+ 1)que devuelve el algoritmo no relajado y después actualizar v(n+ 1, ∗) como
v(n+ 1, ∗) = (1− α)·v(n+ 1) + α·v(n) (28)
Los valores típicos que se emplean son
Variable Valor de αp 0.3U 0.7
k − ε 0.3
Cuadro 3: Factores de relajación para la resolución de las ecuaciones del movimiento.
3.3.4 Condiciones iniciales y de contorno.
Las condiciones iniciales de la simulación puede �jarse fácilmente dentro de cada uno delos archivos donde se encuentran las condiciones de contorno. Cada vez que se obtiene unasolución, OpenFOAM te permite guardarla, parar la simulación y volver a arrancar desdeesa solución. Como se comentará más adelante, esta ha sido la estrategia que se ha seguidoen este proyecto para el cálculo de las variables en el caso evolutivo. Para el cálculo de lassoluciones estacionarias se comenzó desde el reposo, ya que la disminución de coste compu-tacional era mínima.
Antes de comenzar a hablar sobre las condiciones de contorno hay que hacer diferenciaentre frontera y pared, lo que en OpenFOAM se denomina patch y wall. El uso del términopatch es el término de frontera genérico. El caso de wall se reserva para nombrar el obje-to/escenario donde se imponen las leyes de pared.
Una vez que se ha creado los archivos de resolución numérica el último paso para com-pletar un caso es generar el archivo de condiciones de contorno. A continuación se citaránlas condiciones que se han impuesto a cada variable.
Para nombrar las fronteras del dominio computacional se ha adoptado la nomenclaturaque se muestra en [11]
26

plano perpendicular a OX con el menor valor de x x_plano perpendicular a OX con el mayor valor de x _xplano perpendicular a OY con el menor valor de y y_plano perpendicular a OY con el mayor valor de y yplano perpendicular a OZ con el menor valor de z _zplano perpendicular a OZ con el mayor valor de z z_
Cuadro 4: Nomenclatura de las fronteras del dominio �uido
Para el caso de la velocidad, las condiciones de contorno son
Variable Condición de contornoU atmBoundaryLayerInletVelocity
p zeroGradient
k fixedValue
ε atmBoundaryLayerInletEpsilon
νt calculated
Cuadro 5: Condiciones de contorno para las fronteras de entrada
Para la salida se tienen las siguientes condiciones
Variable Condición de contornoU zeroGradient
p fixedValue
k zeroGradient
ε zeroGradient
νt calculated
Cuadro 6: Condiciones de contorno para las fronteras de salida
La condición �xedValue es un poco delicada, ya que si el �ujo desprendido llegase a esafrontera se producirían problemas de estabilidad en la solución. Para imponer esta condi-ción hay que asegurarse que la frontera esté lo su�cientemente lejos del obstáculo así comoasegurarse de que el �ujo es uniforme con el �n de evitar problemas. La ventaja de imponeresta condición es una mejora en la velocidad de convergencia. En el caso de resolución deeste proyecto se da este caso de lejanía por lo que no se darán problemas relacionados conesta condición de contorno.
En el caso de que el vector dirección del viento sea ortogonal a la normal de la fronterade entrada, cualquiera de las condiciones anteriores se sustituye por la condición slip. Estees el caso de la frontera _z , ya que la velocidad empleada es perpendicular al eje verticaldel escenario, por lo que la condición de contorno para cualquier variable será slip. Paraimponer esta condición hay que asegurarse de que el dominio sea lo su�cientemente grandecomo para poder asegurar que la velocidad en la frontera es perpendicular a la normal de esta.
Por último queda citar las condiciones de contorno impuestas sobre la pared (escenario).
27

Variable Condición de contornoU fixedValue
p zeroGradient
k kqRWallFunction
ε epsilonWallFunction
νt nutkWallFunction
Cuadro 7: Condiciones de contorno en la pared
3.4 Validación (Implementación en OpenFOAM).
3.4.1 Datos del problema.
El �ujo alrededor de cuerpos romos tiene una gran importancia en el área de la ingeniería.El caso del cilindro circular es de gran interés porque el �ujo a su alrededor es muy complejoy se muestra el desprendimiento de torbellinos en la estela, generando la calle de Kàrman.
Figura 4: Líneas de corriente alrededor del cilindro para un cierto instante del caso noestacionario.
En este problema, la capa límite, la intereracción de las estructuras turbulentas, la tran-sición de laminar a turbulento o la separación de la capa límite varían su comportamiento amedida que lo hace el número de Re. Tiene muchas aplicaciones a parte de las académicas,sobre todo en el área de la industria o�shore. El desprendimiento de torbellinos induce unavibración en la estructura que puede conducir a un fallo de la estructura por fatiga, o en elcaso más extremo, que la frecuencia de desprendimiento se encuentre cerca de la frecuencia
28

de resonancia de la estructura y se produzca el fallo instantáneo de la misma.
Hasta ahora se han mostrado los modelos disponibles para la simulación numérica asícomo las diferentes opciones que tiene el mallado pero hay que contrastar que funcione dela manera que se espera. Para certi�car la elección tomada frente a todas estas variables seha diseñado un caso de validación de un cilindro in�nito
Figura 5: Caso de validación del modelo con un cilindro in�nito
Para realizar la simulación se utilizó una malla estructurada, generada a partir de unarchivo blockMeshDict. Las dimensiones características del dominio �uido del caso son
x_ (m) -10_x (m) 80y_ (m) -10_y (m) 10z_ (m) -10_z (m) 0
Cuadro 8: Dimensiones de la malla
Las condiciones bajo las que se realizó la simulación se muestran en la siguiente tabla
29

Re 3,3× 106
Cuadro 9: Condiciones de la simulación
Éste número de Re se corresponde con velocidades 1m/s para edi�cios con un tamañocaracterístico de 25m.
Las características de la malla son las siguientes
Tipo de malla EstructuradaNúmero de celdas 32000
Cuadro 10: Características principales de la malla usada sobre el cilindro.
Los parámetros numéricos que se han empleado son los mismos que se han descrito en elapartado anterior con el �n de validar la implementación numérica del solver con una mallaadecuada. El motivo de la elección de la malla estructurada es su rápida convergencia a lasolución.
Las condiciones de contorno que se �jaron son diferentes a las empleadas en los otroscasos. Debido a que se forman estructuras turbulentas muy complejas la solución es muysensible al tamaño del dominio �uido. Si se coge un dominio muy pequeño se corre el ries-go de forzar una solución en los contornos, lo que produce una solución divergente. Lascondiciones de contorno que se imponen en las bases del cilindro son de plano de simetría(SymetryPlane) para forzar la calidad de cilindro in�nito. El resto de condiciones que seimponen son las mismas que se citaron en el apartado 3.3.4 salvo a la salida. Los torbellinosdesprendidos del cilindro llegan hasta la frontera lo que genera que habrá zonas del espaciodonde el �uido salga y en otras entre. Si esto ocurre en la frontera y las condiciones decontorno que se han �jado no son consistentes con ela física del problema se desestabiliza lasolución, di�cultando la convergencia e incluso llegando a un obtener una solución divergen-te. Por esto en la salida se emplea una condición de contorno denominada InletOutlet quedetecta si ocurre este fenómeno.
3.4.2 Discusión de resultados.
Para ver el efecto del paso temporal en los resultados, los cálculos se han hecho variandoel paso temporal de forma que el número de Courant no exceda de un valor pre�jado. Lacondión CFL (Courant-Friedichs-Lewy) es un parámetro clave de estabilidad en las simula-ciones no estacionarias ya que relaciona el paso temporal de integración con el tamaño dela celda y la velocidad en ella de la siguiente forma
Co =u∆t
∆x(29)
En el caso de que el esquema de integración temporal sea explícito, el número de Couranttiene como valor máximo 1. Para valores superiores se pueden generar inestabilidades en elesquema númerico. En el caso no estacionario como es el presente, la solución cambia concada paso temporal y si es un cambio muy brusco, las sucesivas iteraciones no aseguran laconvergencia de la solución, ya sea el esquema de integración temporal explícito o implícito
30

(como es en este caso). Para evitar los problemas de estabilidad numérica, se combinan unosfactores de relajación adecuados y un número de Courant bajo [34].
La simulación se divide en 2 partes, una primera dedicada al cálculo del caso estacionarioy otra al cálculo del evolutivo. La razón de esta división es el coste computacional ya que sila solución evolutiva comienza desde la solución estacionaria tiene un coste computacionalsensiblemente menor que si arranaca la simulación desde el reposo. Se han calculado lasfuerzas que sufre el cilindro así como sus coe�cientes aerodinámicos.
Figura 6: Coe�cientes de sustentación y de resistencia en función de la iteraciones del algo-ritmo SIMPLE.
Como se puede ver, el coe�ciente de sustentación en las primeras iteraciones oscila hastaque la solución comienza a converger y se mantiene constante e igual a 0. Por otra parte elvalor del coe�ciente de resistencia muestra el mismo comportamiento tendiendo a un valorconstante también, como era de esperar.
Si se observan las soluciones de velocidad, se ve como se han formado tras el cilindro doszonas de recirculación de forma simétrica idénticas.
31
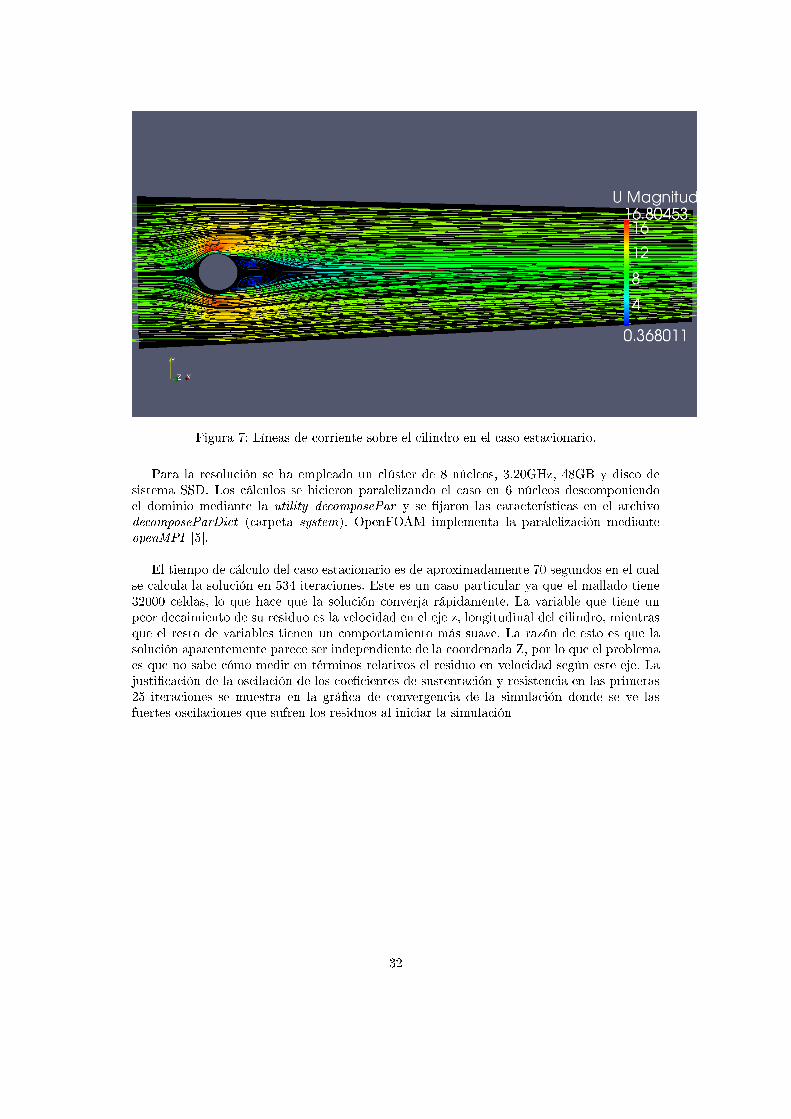
Figura 7: Líneas de corriente sobre el cilindro en el caso estacionario.
Para la resolución se ha empleado un clúster de 8 núcleos, 3.20GHz, 48GB y disco desistema SSD. Los cálculos se hicieron paralelizando el caso en 6 núcleos descomponiendoel dominio mediante la utility decomposePar y se �jaron las características en el archivodecomposeParDict (carpeta system). OpenFOAM implementa la paralelización medianteopenMPI [5].
El tiempo de cálculo del caso estacionario es de aproximadamente 70 segundos en el cualse calcula la solución en 534 iteraciones. Este es un caso particular ya que el mallado tiene32000 celdas, lo que hace que la solución converja rápidamente. La variable que tiene unpeor decaimiento de su residuo es la velocidad en el eje z, longitudinal del cilindro, mientrasque el resto de variables tienen un comportamiento más suave. La razón de esto es que lasolución aparentemente parece ser independiente de la coordenada Z, por lo que el problemaes que no sabe cómo medir en términos relativos el residuo en velocidad según este eje. Lajusti�cación de la oscilación de los coe�cientes de sustentación y resistencia en las primeras25 iteraciones se muestra en la grá�ca de convergencia de la simulación donde se ve lasfuertes oscilaciones que sufren los residuos al iniciar la simulación
32
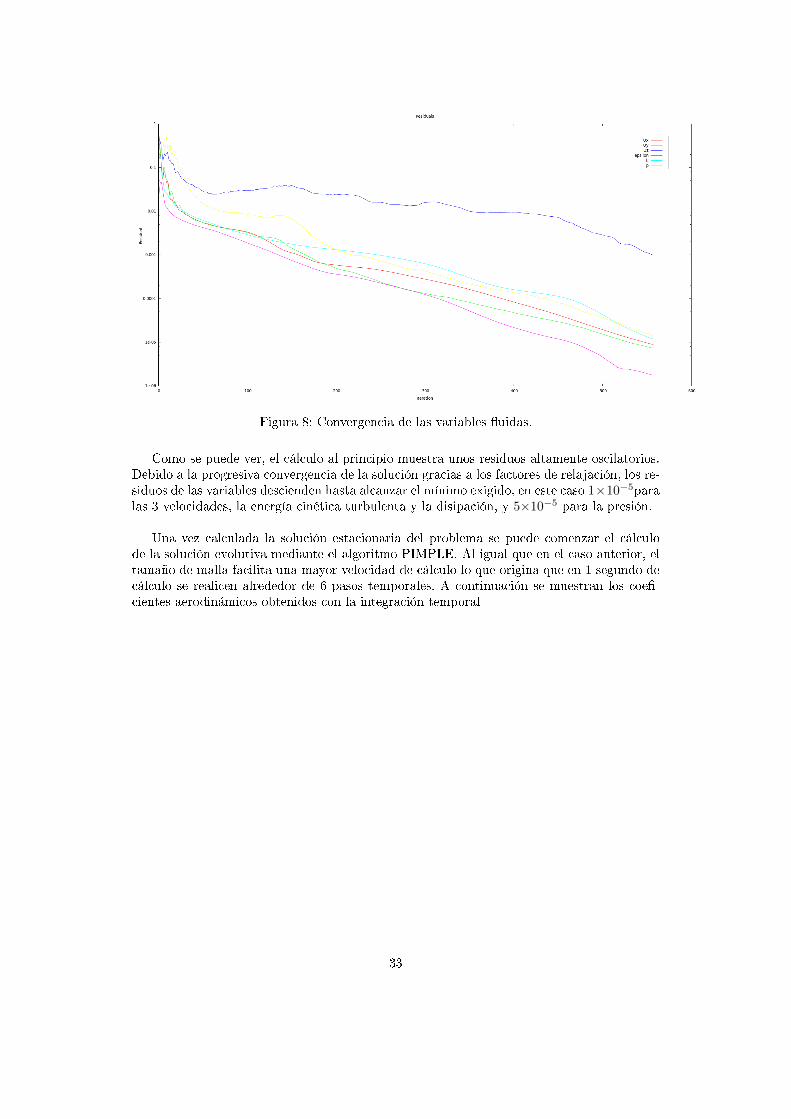
Figura 8: Convergencia de las variables �uidas.
Como se puede ver, el cálculo al principio muestra unos residuos altamente oscilatorios.Debido a la progresiva convergencia de la solución gracias a los factores de relajación, los re-siduos de las variables descienden hasta alcanzar el mínimo exigido, en este caso 1×10−5paralas 3 velocidades, la energía cinética turbulenta y la disipación, y 5×10−5 para la presión.
Una vez calculada la solución estacionaria del problema se puede comenzar el cálculode la solución evolutiva mediante el algoritmo PIMPLE. Al igual que en el caso anterior, eltamaño de malla facilita una mayor velocidad de cálculo lo que origina que en 1 segundo decálculo se realicen alrededor de 6 pasos temporales. A continuación se muestran los coe�-cientes aerodinámicos obtenidos con la integración temporal
33

Figura 9: Coe�cientes de sustentación y de resistencia en función del tiempo.
Tener una señal amplia en el tiempo como ésta puede llegar a ser complicado por di-versos motivos por lo que más adelante se presenta un método alternativo. Los resultadosmuestran una señal con bastantes periodos, por lo que es viable realizar un análisis espectralde la misma y obtener la frecuencia del movimiento. Con el �n de contaminar lo menos po-sible el espectro se toma la señal a partir de un punto su�cientemente alejado del transitorio.
Figura 10: Power Spectrum Density del coe�ciente de sustentación calculado vs. Oh JoonKwon.
La curva anterior compara los resultados obtenidos en la simulación del cilindro con los
34

resultados obtenidos por [29]. Como se observa la energía presente en la primera frecuenciaes similar en ambos casos además del Strouhal al que se da. El decaimiento de la curvacalculada es mayor que la de [29] a que posiblemente se ha empleado un tramo con menorefecto del transitorio. Nótese que la frecuencia fundamental no tiene energía ya que el valormedio de la sustentación es 0.
Con el �n de ver como varía la solución con el número de Courant y elegir un valorcorrecto para la resolución del caso, se han simulado 4 casos diferentes para Co máximosdistinto.
Figura 11: PSD de la sustentación para diferentes números de Courant.
La energía presente en la señal es diferente a la mostrada antes ya que la simulación secorresponde a un cilindro con tamaño 10 veces menor.
A la vista de los resultados obtenidos se veri�ca que el modelo seleccionado para realizarlos cálculos posteriores guarda una gran semejanza con los resultados de la bibliografía. Elnúmero de Strouhal no es sensible al Courant del caso cuando éste es inferior menor que 1.También se realizó una simulación para un Co>1 en la que no se obtuvo ningún resultado yaque la inestabilidad del esquema citada anteriormente hizo que la solución no convergiese.Además se muestra que el pico de la primera frecuencia tampoco varían con la elección delpaso temporal. Por otro lado, las colas del PSD son muy sensibles a la elección del pasotemporal y habría que hacer un estudio de en el marco de un simulador de vuelo y ver comode sensible es a las diferentes señales para después seleccionar el que ofrezca el espectro máslimpio con el �n de facilitar el postprocesado y su explotación en tiempo real.
Por último se ha representado un instante de tiempo la viscosidad cinemática turbulentay la vorticidad
35

Figura 12: Isosuper�cies de viscosidad cinemática turbulenta en un instante genérico.
Figura 13: Isosuper�cies de vorticidad en un instante de tiempo
36

3.4.3 Formulación del caso.
Una vez se ha demostrado la validez del método seleccionado para resolver el problema, esel momento de presentar el caso de estudio. El objetivo principal de este proyecto era elcálculo de las componentes no estacionarias de viento en orografías complejas, por lo que elentorno escogido para llevar a cabo dicho trabajo es un escenario urbano. Para ello se tomócomo referencia el trabajo de [11], que presentan la resolución del �ujo a través de edi�cios.
Figura 14: Escenario extraído de [11]
Como se puede apreciar, la diversidad de los tamaños de edi�cios va a causar que lasfrecuencias de desprendimiento de torbellinos va a ser diferente en cada uno de ellos. Estoconlleva a que en el análisis de resultados no se podrá ver claramente la contribución decada uno de ellos a esas frecuencias. Por ello se ha aislado un único edi�cio y el proyecto vaa girar en torno a él. A continuación se muestra el edi�cio escogido
37

Figura 15: Representación del edi�cio seleccionado para la resolución de las componentes noestacionarias de viento
Las dimensiones características del rascacielos son las siguientes
Ancho(m) 20Largo(m) 20Altura(m) 100
Cuadro 11: Dimensiones características del edi�cio
La malla que se empleó para el resolución es una malla no estructurada con re�namientoen función de la distancia al obstáculo. Las dimensiones características son
x_ (m) -250_x (m) 500y_ (m) -200_y (m) 200z_ (m) 0_z (m) 200
Cuadro 12: Dimensiones del dominio computacional
38
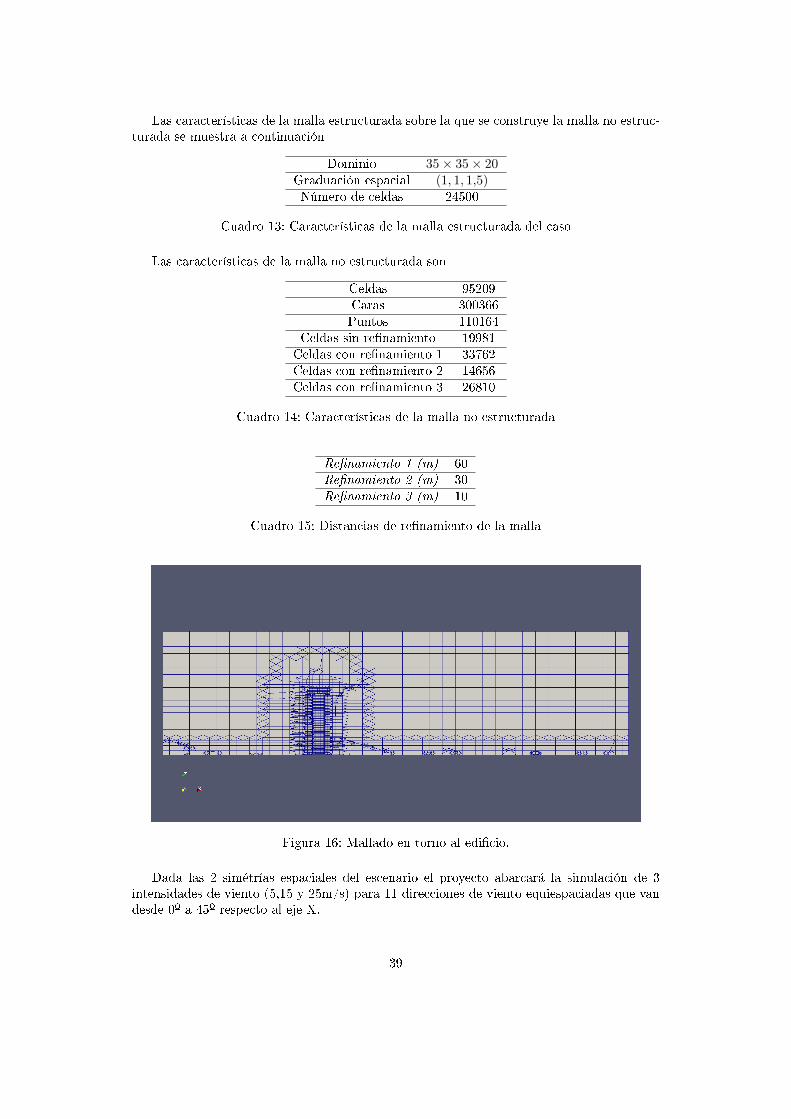
Las características de la malla estructurada sobre la que se construye la malla no estruc-turada se muestra a continuación
Dominio 35× 35× 20Graduación espacial (1, 1, 1,5)Número de celdas 24500
Cuadro 13: Características de la malla estructurada del caso
Las características de la malla no estructurada son
Celdas 95209Caras 300366Puntos 110164
Celdas sin re�namiento 19981Celdas con re�namiento 1 33762Celdas con re�namiento 2 14656Celdas con re�namiento 3 26810
Cuadro 14: Características de la malla no estructurada
Re�namiento 1 (m) 60Re�namiento 2 (m) 30Re�namiento 3 (m) 10
Cuadro 15: Distancias de re�namiento de la malla
Figura 16: Mallado en torno al edi�cio.
Dada las 2 simétrías espaciales del escenario el proyecto abarcará la simulación de 3intensidades de viento (5,15 y 25m/s) para 11 direcciones de viento equiespaciadas que vandesde 0º a 45º respecto al eje X.
39

40

4 Modelado de orden reducido.
4.1 Técnica HOSVD.
4.1.1 Singular Value Decomposition.
La simulación numérica está cobrando una gran importancia en la industria aeronáuticamoderna. Esto tiene como inconveniente que el cálculo CFD genera una gran cantidad deresultados y se vuelve muy complejo su almacenamiento y postprocesado. La técnica delHOSVD (High Order Singular Value Decomposition) es la generalización del SVD (SingularValue Decomposition) a tensores. El tensor es la forma natural de almacenar una variableque depende de más de 2 parámetros. Es frecuente en problemas aerodinámicos, que depen-den de más de 2 variables espaciales, el tiempo, la intensidad de viento o la dirección. Sinembargo, cada elemento del tensor está relacionado con el resto de elementos a través de lasecuaciones de Navier-Stokes. El HOSVD tiene en cuenta estas correlaciones para obtener unmodelo de base de datos. La dependencia con cada parámetro se tiene en cuenta en cadauno de los modos unidimensionales.
Para comenzar a de�nir de forma matemática la técnica HOSVD primero hay que de�nirla descomposición en valores singulares de una matriz (SVD). La técnica SVD proporcionauna descomposición de una matriz A ∈ Rmxnde la forma
A = UΣV T (30)
donde U ∈ Rmxm y V ∈ Rnxn son dos matrices ortonormales y Σ ∈ Rmxnes una matrizdiagonal, donde los elementos distintos de zero se denominan valores singulares. La ecuación(30) se puede expresar en términos de los elementos de la matriz
aij =
r∑l=1
σluilvjl (31)
donde, para cada l, los modos uil y vjl son los modos POD (Proper Orthogonal Decomposi-tion) de las columnas y de las �las de A y son los autovectores asociados a los autovaloresdistintos de cero de las matrices simétricas AT ·A y A·AT respectivamente. De esta formalos valores singulares se corresponden con el cuadrado de los autovalores.
Si se trunca con s < r la descomposición se obtiene una aproximación de la matriz A,que se denominara A
aij =
s∑l=1
σluilvjl (32)
El error asociado al truncamiento (E = A− A) viene dado como
‖E‖ =
[r∑
l=s+1
(σl)2
]1/2
(33)
41

4.1.2 High Order Singular Value Decomposition.
El HOSVD [10] es una extensión del SVD a tensores de orden mayor que 2. La extensióndel SVD a un tensor de 3er orden A ∈ RIxJxK y rango r será
aijk =
r∑l=1
σluilvjlwkl (34)
Esta descomposición se conoce como canonical decomposition (CANDECOMP) o parallelfactors (PARAFAC). La descomposición de Tucker [33] de un tensor A ∈ RIxJxK tiene laforma
aijk =
r1∑i1=1
r2∑j1=1
r3∑k1=1
σi1j1k1uii1vjj1wkk1 (35)
donde σi1j1k1son los elementos de un tensor de 3er orden denominado tensor núcleo y paracada conjunto de valores i1,j1 y k1, uii1vjj1wkk1son los elementos de 3 sistemas de vectoresconocidos como modos de la descomposición de Tucker. Así pues el HOSVD es una des-composición de Tucker en la que los modos son ortonormales y r1, r2 y r3 son los rangosde las matrices de�nidas positivas B(1) ∈ RIxI ,B(2) ∈ RJxJ y B(3) ∈ RKxK expresadas como
b(1)il =
∑j,k
aijkaljk
b(2)jl =
∑i,k
aijkailk (36)
b(3)kl =
∑i,j
aijkaijl
Los modos del HOSVD son los autovectores de esas matrices asociados con los autovaloresno nulos
I∑l=1
b(1)il uli1 = (αi1)2uii1
I∑l=1
b(2)jl vlj = (βj1)2ujj1 (37)
I∑l=1
b(3)kl wlk1 = (γk1)2ukk1
donde los escalares positivos αi1 ,βj1 y γk1son los valores singulares de alto orden (HOSVs)de la descomposición. En el caso de que se truncase la descomposición con s1 ≤ r1 , s2 ≤ r2
42
y s3 ≤ r3se obtendría la siguiente aproximación
aijk h aijk =
s1∑i1=1
s2∑j1=1
s3∑k1=1
σi1j1k1uii1vjj1wkk1 (38)
El error asociado al truncamiento (E = A− A) viene dado como
‖E‖ ≤
s1∑i1=s1+1
(αi1)2 +
s2∑j1=s2+1
(βj1)2 +
s3∑k1=s3+1
(γk1)2
1/2
(39)
4.2 Aplicación al tratamiento de �ujos no estacionarios.
4.2.1 Análisis espectral y reorganización de la información.
Como ya se comentó, una vez generado el campo �uido del caso estacionario se calcula elevolutivo a partir de él. Al igual que en el caso de la validación, lo ideal sería tener la in-formación de todo el campo �uido para todos los instantes calculados y poder realizar unaFFT (Fast Fourier Transform) de todas las señales . Pero aquí surgen varios problemas quedi�cultan esta opción:
� Para obtener un análisis espectral lo más limpio posible, la señal tiene que ser muy lar-ga en el tiempo. Gracias a las pruebas hechas se estimó que a partir de 2500 segundosse conseguía una señal bastante limpia como para asegurar que el efecto del transitoriohabía desaparecido. En función de los casos, el que menos pasos temporales necesitópara llegar a este tiempo fue la intensidad de 5m/s y utilizó 22600 pasos, mientrasque la velocidad de 25m/s necesitó 113000 pasos de tiempo. Esto signi�ca que paraobtener una FFT lo más limpia posible hay que realizar muchas horas de simulación.
� Sólo la información de la velocidad en todo el campo �uido en un instante genéricoocupa un espacio medio de 4.5MB en formato ASCII, lo que signi�ca que guardartodo el campo �uido de 1 único caso de máxima intensidad de viento puede llegar aocupar más de 400GB de memoria. Este tamaño hace que sea imposible almacenar los33 casos del proyecto así como su posterior tratamiento.
Se realizaron las simulaciones hasta el instante 2500 y se almacenaron los datos de veloci-dad en 15 puntos del espacio distribuidos de forma que al menos 5 de ellos siempre estuviesenen la estela del edi�cio.
Se tomaron las señales temporales y se realizó un análisis espectral para comprobar queel instante de parada que se había seleccionado era aceptable
43

Figura 17: Señal temporal de un punto del campo �uido en función de los pasos temporales(Caso 25m/s y orientación 0º).
Figura 18: Efecto del transitorio en el PSD (Caso 25m/s y orientación 45º).
Como se ve, el efecto del transitorio hace que el espectro varíe sustancialmente por loque se refuerza la idea de que hay que irse a tiempos lejanos para tener una señal válida.
Como alternativa al almacenamiento de todo el campo �uido para todos los instantes, serealizó en la simulación de al menos un periodo de la señal completamente limpia. Graciasal espectro fue fácil estimar cual era la frecuencia del movimiento, por lo que se obtuvo lasolución de todo el campo �uido a partir del instante 2500. Una vez obtenidos los datos conOpenFOAM, se crearon varias herramientas con el �n de extraer los datos de velocidad delos �cheros y generar un archivo de MATLAB, donde se llevó a cabo toda esta parte delproyecto. Las matrices de velocidad para cada caso tienen la estructura 95209 ×N , siendo
44

N∆t el número de pasos temporales que dependiendo del caso oscila entre 500 y 1200, y elnúmero 95209 el número de celdas de la malla no estructurada.Como hay 3 componentes de velocidad, las matrices se colocan una a continuación de otra,por lo que el tamaño �nal es 285627×N
Si se aplica un SVD a cada una de las matrices se obtendrán 3 cosas: los modos tempo-rales, los modos espaciales y los valores singulares. Como se comentó en el apartado 4.1, sise truncan los modos y los valores singulares se comete un error que va como la expresión(33). Para truncar se dibujan los valores singulares y se comprueba el número de modoscon el que se obtiene una buena aproximación
Figura 19: Valores singulares para el caso de 5m/s y orientación 0º.
45

Figura 20: Zoom de los valores singulares para el caso de 5m/s y orientación 0º.
Truncando las matrices se obtiene la siguiente solución
Figura 21: Reconstrucción de la solución con diferentes números de modos (Caso 5m/s yorientación 0º).
46

Aunque la oscilación no es muy grande se produce un desajuste total de la curva re-construida respecto de la original lo que indica que el número de modos es insu�ciente. Laexplicación de esto no reside únicamente en los valores singulares, sino también en el hechode que intervienen los modos espaciales. El campo �uido del que se dispone es muy grandeen relación con el edi�cio, lo que hace que las variaciones espaciales sean muy pequeñas entodos los lados salvo en una zona cercana al edi�cio. Esos modos más energéticos no tienenpor qué corresponderse con los valores singulares más grandes, de forma que a la hora detruncar es posible que parte de ellos queden fuera. La forma de evitar esto es reescalar losmodos espaciales de forma que no se pierda ninguno con demasiada energía.
Para llevar a cabo esta tarea se comienza haciendo el SVD del campo �uido
A = TpΣpUp (40)
de forma que en Up se encuentran los modos espaciales y en Tp los modos temporales.
Se de�nek como
ki =√
(ui)2 + (vi)2 + (wi)2 (41)
donde ui, vi y wison las 3 componentes de los modos espaciales (U ip) y el subíndice i expresael modo . A continuación, se reescala el modo espacial de la siguiente forma
U ip =U ip‖ki‖∞
(42)
Para que la solución siga siendo la misma se multiplica el valor de kppor el modo temporaly el valor singular
T ip = ‖ki‖∞ σipTip (43)
en este caso Tprepresenta los modos temporales y σp los valores singulares. A pesar de haberreescalado los modos puede observarse que el producto de ambas matrices sigue siendo lamatriz A
A = TpU ′p = ‖k‖∞ TpΣpUp‖k‖∞
= TpΣpUp (44)
Con el �n de saber que modos se deben retener se calcula el valor Lp =∥∥∥T ip∥∥∥∞
47

Figura 22: Representación de Lp junto a los valores singulares reescalados (Caso 15m/s yorientación 18º)
Figura 23: .Representación de Lp junto a los valores singulares reescalados (Caso 5m/s yorientación 0º)
Como se puede ver, hay modos que poseen una energía mayor que modos anteriores yque antes eran truncados y no se tenían en cuenta para la reconstrucción del campo �uido.De esta forma se �ja un nivel de forma que el modo que esté por encima se retiene y queesté por debajo se trunca. Una vez seleccionados los modos, se reordenan las matrices de
48
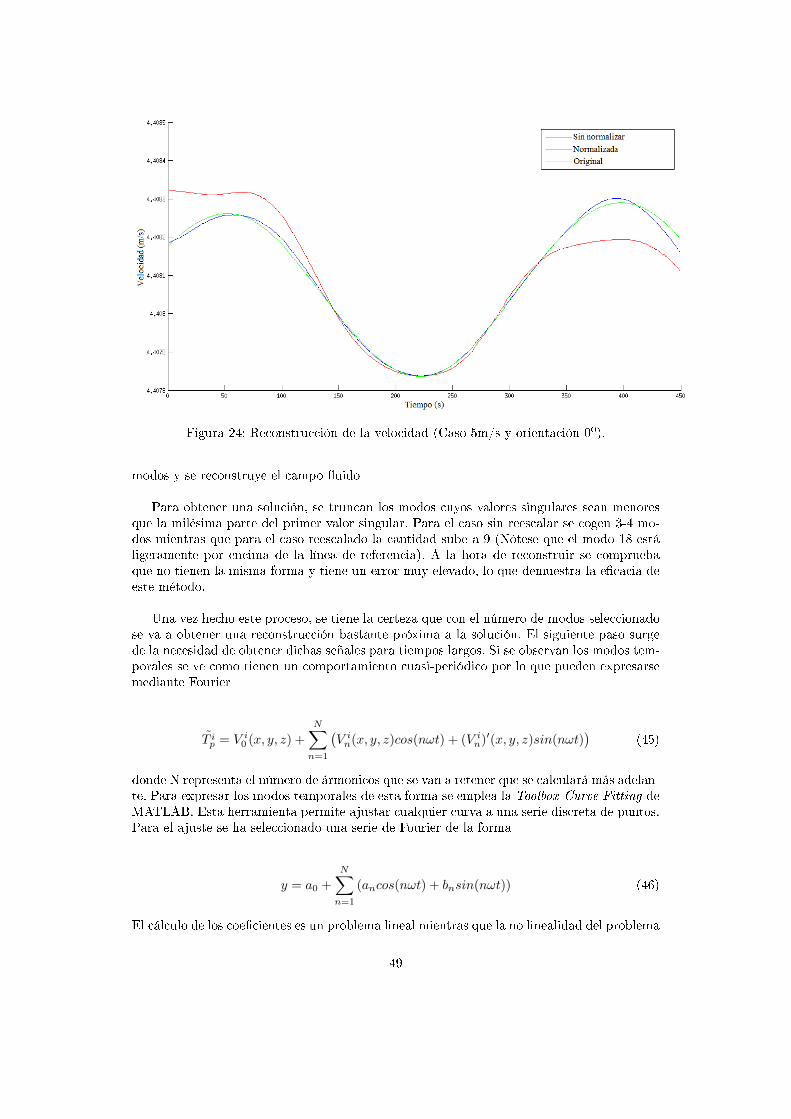
Figura 24: Reconstrucción de la velocidad (Caso 5m/s y orientación 0º).
modos y se reconstruye el campo �uido
Para obtener una solución, se truncan los modos cuyos valores singulares sean menoresque la milésima parte del primer valor singular. Para el caso sin reescalar se cogen 3-4 mo-dos mientras que para el caso reescalado la cantidad sube a 9 (Nótese que el modo 18 estáligeramente por encima de la línea de referencia). A la hora de reconstruir se compruebaque no tienen la misma forma y tiene un error muy elevado, lo que demuestra la e�cacia deeste método.
Una vez hecho este proceso, se tiene la certeza que con el número de modos seleccionadose va a obtener una reconstrucción bastante próxima a la solución. El siguiente paso surgede la necesidad de obtener dichas señales para tiempos largos. Si se observan los modos tem-porales se ve como tienen un comportamiento cuasi-periódico por lo que pueden expresarsemediante Fourier
T ip = V i0 (x, y, z) +
N∑n=1
(V in(x, y, z)cos(nωt) + (V in)′(x, y, z)sin(nωt)
)(45)
donde N representa el número de ármonicos que se van a retener que se calculará más adelan-te. Para expresar los modos temporales de esta forma se emplea la Toolbox Curve Fitting deMATLAB. Esta herramienta permite ajustar cualquier curva a una serie discreta de puntos.Para el ajuste se ha seleccionado una serie de Fourier de la forma
y = a0 +
N∑n=1
(ancos(nωt) + bnsin(nωt)) (46)
El cálculo de los coe�cientes es un problema lineal mientras que la no linealidad del problema
49

de la determinación de ω obliga a emplear un método iterativo y de ahí que se tenga que daruna estimación inicial. Se decide utilizar como condición inicial la frecuencia que se extraede los espectros mostrados antes ya que la frecuencia debe ser muy próxima a esa.
Una vez realizado el ajuste mediante Fourier de los modos temporales, se obtiene cadauno de los modos como una serie de coe�cientes y una frecuencia. Para que todos tengan lamisma frecuencia se procede de la siguiente forma
ω =
∑i(ωiM
iP )∑
iMiP
(47)
se de�ne Mp como
M ip =
√√√√ N∑n=1
((ain)2 + (bin)2) (48)
El subíndice i indica el modo.De esta forma se da mayor peso a las frecuencias que ten-gan amplitudes mayores. Para el caso de los coe�cientes any bnse procede de forma similar,se truncan siguiendo un criterio de turbulencia, de forma que cualquier coe�ciente que nocumpla la relación ain > a1
010−3 se desprecia. El criterio anterior tira oscilaciones con unaamplitud relativa máxima, en todos los puntos, menor que una milésima, que está muy pordebajo, tanto de la precisión de OpenFOAM como de la sensibilidad que puede esperarseen un piloto. Por otro lado, hacerlo es determinante para tirar información no relevante queaumentaría, innecesariamente, el número de modos que se retienen, lo que, a su vez, aumen-taría el número de modos en la reconstrucción �nal. Eso se traduciría en un aumento, tantode la memoria necesaria como del tiempo de cálculo de la herramienta real, que tiene queoperar en tiempo real. Al realizar este truncamiento se obtiene el valor de N, que marcaráel número de armónicos que se guardan hasta un máximo de 8.
50

Figura 25: Reconstrucción del 2 modo temporal mediante ajuste por una serie de Fourier(Caso 15m/s y orientación 31.5º).
Figura 26: Reconstrucción del 4 modo temporal mediante ajuste por una serie de Fourier(Caso 15m/s y orientación 31.5º).
51
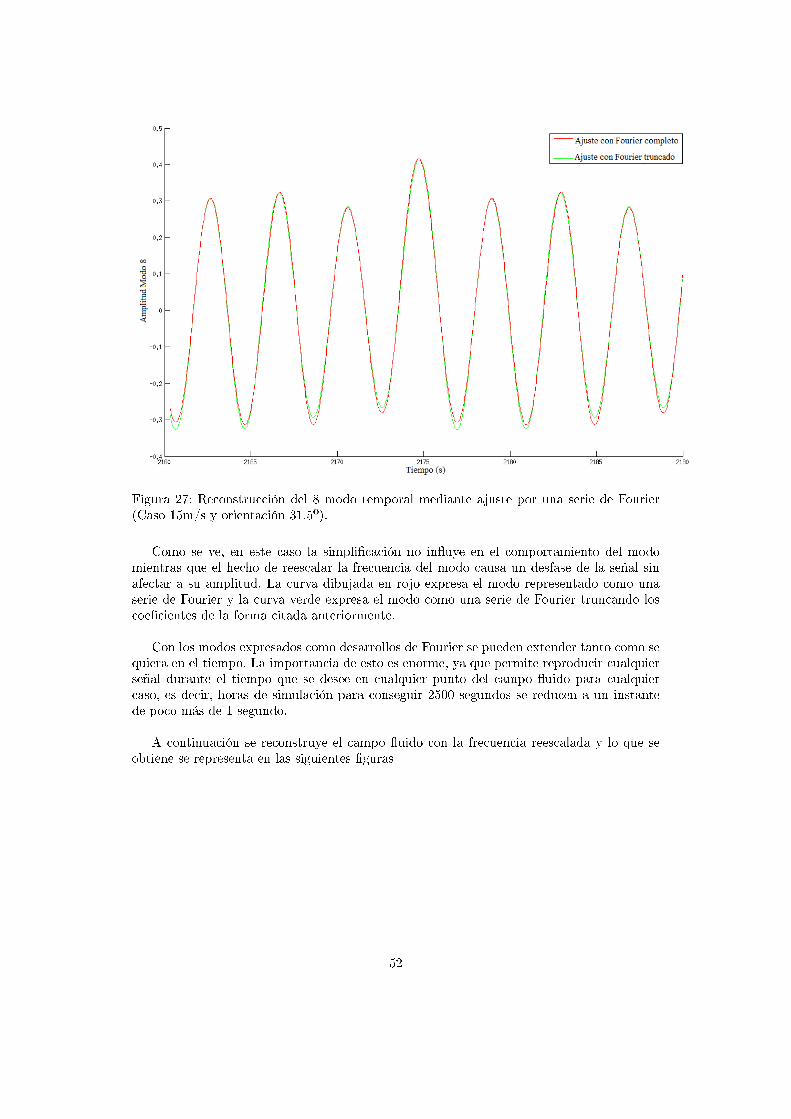
Figura 27: Reconstrucción del 8 modo temporal mediante ajuste por una serie de Fourier(Caso 15m/s y orientación 31.5º).
Como se ve, en este caso la simpli�cación no in�uye en el comportamiento del modomientras que el hecho de reescalar la frecuencia del modo causa un desfase de la señal sinafectar a su amplitud. La curva dibujada en rojo expresa el modo representado como unaserie de Fourier y la curva verde expresa el modo como una serie de Fourier truncando loscoe�cientes de la forma citada anteriormente.
Con los modos expresados como desarrollos de Fourier se pueden extender tanto como sequiera en el tiempo. La importancia de esto es enorme, ya que permite reproducir cualquierseñal durante el tiempo que se desee en cualquier punto del campo �uido para cualquiercaso, es decir, horas de simulación para conseguir 2500 segundos se reducen a un instantede poco más de 1 segundo.
A continuación se reconstruye el campo �uido con la frecuencia reescalada y lo que seobtiene se representa en las siguientes �guras
52

Figura 28: Reconstrucción de un punto del campo �uido (Caso 15m/s y orientación 9º).
Figura 29: Reconstrucción de un punto del campo �uido (Caso 5m/s y orientación 40.5º).
53

Se ha representado en azul la señal original del campo, en verde la reconstruida decalada(con el �n de ver que se superpone a la señal original) y en rojo la señal reconstruida. Larazón del desfase se debe a dos motivos: una traslación en el tiempo que no se conoce yerrores en la frecuencia que van acumulando desfase. La fase es el producto de la frecuenciapor el tiempo, por lo que pequeños errores en la frecuencia generan grandes desfases si eltiempo es grande. Así, los modos temporales se pueden expresar como
Tp = [1 cos(ωt) sin(ωt) ... cos(Nωt) sin(Nωt)]
a1
0 a20 a3
0 ... ai0a1
1 a21 ... ... ai1
b11 b21 ... ... bi1... ... ...a1N ... ... ... aiNb1N ... ... ... biN
(49)
ω se considera la frecuencia del modo, aiN y biN los coe�cientes del desarrollo de Fourier yt el tiempo. Dado un instante cualquiera, este modelo permite reproducir la velocidad encualquier punto para ese instante.
Combinando (44) y (49) se llega a la expresión que determina el campo �uido como undesarrollo de Fourier
A = W0 +W1cos(ωt) +W2sin(ωt) +W3cos(2ωt) +W4sin(2ωt) + .... (50)
4.3 Técnica HOSVD con interpolación.
La interpolación en los problemas de este tipo proporciona una información muy valiosa,pues permite predecir el campo de velocidades que habrá con unas determinadas condicionesde intensidad de viento y de dirección para unas condiciones que no han sido previamentecalculadas a partir de las soluciones obtenidas mediante la simulación �uida.
El método de Akima se basa en una interpolación mediante sub-spline continuamentediferenciable. Está construido a base de polinomios de tercer grado a trozos. Sólo se empleanlos datos de los puntos más próximos para determinar los coe�cientes de la interpolaciónpolinómica. Para ello asumen que la pendiente de la curva está determinada localmente por5 puntos situados 2 a cada extremo del intervalo y uno en el centro. Al no suponer unaforma concreta de la curva a interpolar y utilizar pocos puntos, este método no producecomportamientos no naturales en la curva resultante. El desarrollo teórico del método sepuede consultar en [9].
El método seguido se basa en una interpolación en intensidad y en dirección de vientosin utilizar método multiescala ni Gappy. La información es almacenada en un tensor decuarto orden, donde el primer índice se reserva para la solución espacial, el segundo para laintensidad, el tercero para la dirección y el cuarto para las componentes de la velocidad. Entotal habrá 17 tensores, uno el correspondiente al �ujo medio y los otros 16 correspondientesa los 8 primeros armónicos (uno por cada seno y cada coseno de la solución).
TensorF luido = A95209×3×11×3 (51)
54

Antes de comenzar, hay que mirar los valores singulares del tensor ya que la solución sereconstruirá a partir de la solución truncada, siguiendo los criterios del apartado 4.2. Losvalores singulares que se presentan para el �ujo medio son
Figura 30: Valores singulares obtenidos mediante el HOSVD del �ujo medio.
A continuación se presentan los pertenecientes al primer y segundo armónico (compo-nente coseno)
Figura 31: Valores singulares para los tres primeros armónicos (componente coseno).
Como se puede observar, a medida que el armónico es mayor la precisión requerida esmenor ya que contiene una cantidad de energía menor la oscilación unida a dicho armónico.
55
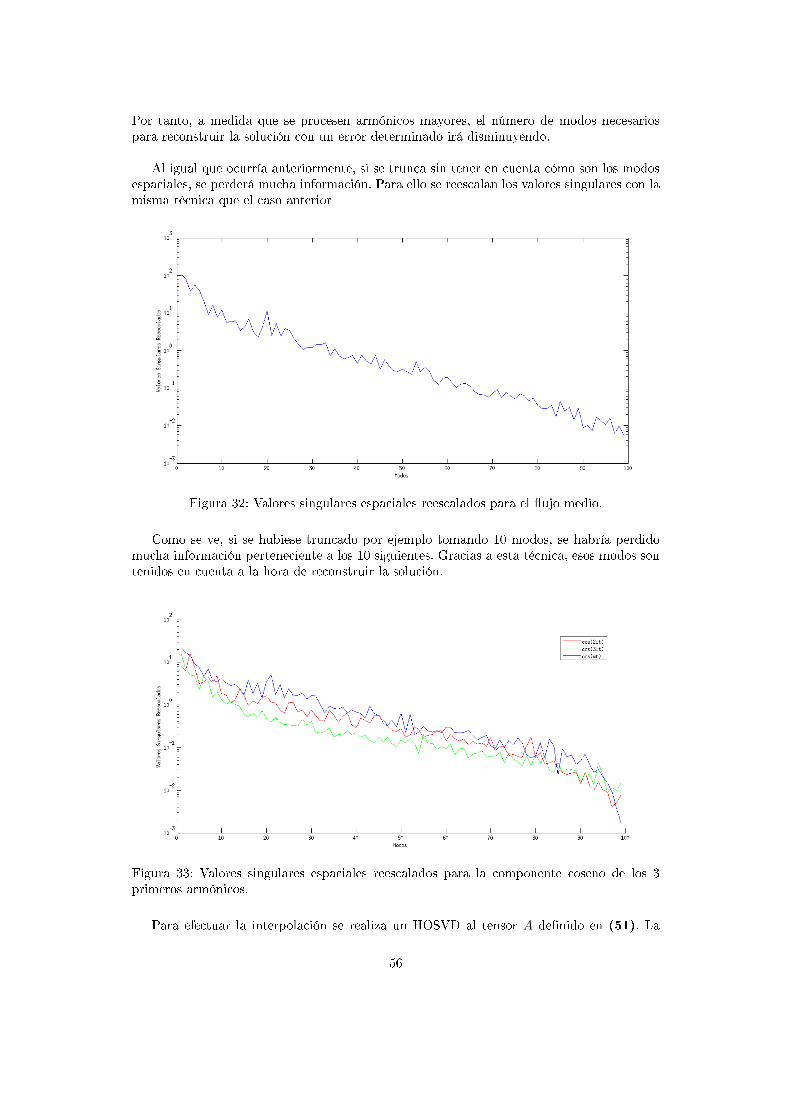
Por tanto, a medida que se procesen armónicos mayores, el número de modos necesariospara reconstruir la solución con un error determinado irá disminuyendo.
Al igual que ocurría anteriormente, si se trunca sin tener en cuenta cómo son los modosespaciales, se perderá mucha información. Para ello se reescalan los valores singulares con lamisma técnica que el caso anterior
Figura 32: Valores singulares espaciales reescalados para el �ujo medio.
Como se ve, si se hubiese truncado por ejemplo tomando 10 modos, se habría perdidomucha información perteneciente a los 10 siguientes. Gracias a esta técnica, esos modos sontenidos en cuenta a la hora de reconstruir la solución.
Figura 33: Valores singulares espaciales reescalados para la componente coseno de los 3primeros armónicos.
Para efectuar la interpolación se realiza un HOSVD al tensor A de�nido en (51). La
56

ventaja del HOSVD es que actúa como un método de separación de variables (es decir, unafunción N-dimensional se puede expresar como una combinación lineal de productos de fun-ciones unidimensionales) y permite pasar de realizar interpolaciones multidimensionales auna serie de interpolaciones unidimensionales, donde los métodos de interpolación son muchomás potentes. Para explicar esto, se considera un tensor de tercer orden A que proporcionalos valores discretos de una variable dependiente f en función de 3 variables independienteso parámetros, cada una representada por uno de los índices del tensor.
f(x1i , x
2j , x
3k) = Aijk h
s1∑p=1
s2∑q=1
s3∑r=1
σpqrUpi V
qj W
rk (52)
De esta forma las variables independientes o parámetros son tenidos en cuenta sólo en losmodos del HOSVD mientras que el tensor reducido (de�nido antes como tensor núcleo) siguesiendo el mismo para cualquier valor de esas variables.
f(x1, x2, x3) = Aijk hs1∑p=1
s2∑q=1
s3∑r=1
σpqrup(x1)vq(x2)wr(x3) (53)
donde up(x1i ) = Upi , v
q(x2j ) = V qj y wr(x3
k) = W rk .
La ecuación (53) permite calcular f para valores de(x1, x2, x3) interpolando. Dicha ecua-ción demuestra lo comentado antes, que la interpolación tridimensional que se debería rea-lizar a la función f se reduce a un conjunto de interpolaciones unidimensionales en lasfunciones up,vq y wr debido a que la expresión (53) puede verse como una separación devariables. En este PFC, la interpolación se lleva a cabo mediante el método de Akima aun-que se puede emplear cualquier otro método. La razón por la que la interpolación de losmodos da tan buen resultado es debido a su comportamiento suave, que se representan acontinuación.
En este caso se busca la interpolación en dirección e intensidad, así que los únicos modosque se interpolan son los correspondientes a estas variables. Una vez realizada la interpola-ción en intensidad y dirección, quedaría por realizar una interpolación más sobre la mallano estructurada y que sería muy rápida.
57

Figura 34: Modos en intensidad del tensor del �ujo medio.
Figura 35: Representación de los 3 primeros modos en dirección del tensor del �ujo medio.
58

Figura 36: Modos 4,5, y 6 en dirección del tensor del �ujo medio.
Los modos que se han dibujado representan a los 6 primeros modos en dirección. A me-dida que los modos son mayores se van volviendo más oscilatorios por lo que la interpolaciónde estos empeorará a medida que el modo sea de mayor orden. A priori, puede ser contra-dictorio con los buenos resultados que se obtienen. La razón de la precisión de las solucionesinterpoladas reside en que los modos más altos están relacionados con los valores singularesmás pequeños por lo que el error que se pueda cometer en la interpolación se ve contrarres-tado por su baja contribución a la hora de reconstruir la solución. Si se observan los valoressingulares asociados a la dirección en la �gura 30, se observa que hay dos órdenes de magni-tud entre el valor singular asociado al primer modo y el asociado al modo 7, por lo que loserrores que se puedan cometer en la interpolación no afectará sensiblemente a la reconstruc-ción. Por otro lado, los primeros modos (que son los que cuentan con mayor peso a la horade reconstruir) son funciones muy suaves, por lo que Akima funcionará muy bien sobre ellos.
Una vez calculados todos los modos se reconstruye el campo �uido por completo, dondese obtienen unos resultados bastante precisos.
59

Figura 37: Solución del �ujo medio calculada (Caso 10m/s y orientación de 25º ).
Figura 38: Solución del �ujo medio interpolada con 30 modos en espacio (Caso 10m/s yorientación de 25º ).
60

Figura 39: Solución del �ujo medio interpolada con 10 modos en espacio (Caso 10m/s yorientación de 25º ).
Figura 40: Solución del �ujo medio interpolada con 4 modos en espacio (Caso 10m/s yorientación de 25º ).
A medida que se reduce el número de modos pertenecientes a la coordenadas espaciales,la estela se difumina progresivamente debido a que se tira información importante a la horade reconstruir el campo �uido. Con 30 modos la estela que se obtiene tiene mucha simulitud
61

con la original y este hecho puede verse comparando los valores singulares en la �gura 32,donde hay una diferencia de 2 órdenes de magnitud del modo 30 con el primer valor singu-lar. De esta forma se ha demostrado que el valor del �ujo medio se puede obtener con 30modos en coordenadas espaciales, así que los armónicos del movimiento también deberíanpoder representarse con 30 modos (de hecho, como se comentó anteriormente, con menos).La mejor forma de ver la reconstrucción de los armónicos es reconstruyendo la solución enun punto del campo �uido.
Figura 41: Comparación de la reconstrucción de la solución interpolada con la soluciónobtenida mediante CFD (Caso 10m/s y orientación 25º).
Figura 42: Comparación de la reconstrucción de la solución interpolada con la soluciónobtenida mediante CFD (Caso 10m/s y orientación 25º).
Las dos imágenes anteriores representan dos puntos alejados entre sí en un zona de es-tela. El decalaje temporal que se empleó para superponer las soluciones obtenidas medianteOpenFOAM y las obtenidas mediante interpolación es el mismo. Esto se debe a que a lahora de realizar la SVD para el cálculo de los modos como desarrollos de Fourier, estosmodos eran globales, es decir, del campo �uido entero. La causa directa de esto es que todo
62

el campo �uido se encuentra desfasado de la solución original de OpenFOAM en la mismamedida.
La representación grá�ca de la estela se muestra a continuación
Figura 43: Representación de la estela turbulenta de la solución original a 50 metros delsuelo (Caso 10m/s y orientación de 25º).
Figura 44: Representación de la estela turbulenta de la solución interpolada a 50 metros delsuelo (Caso 10m/s y orientación de 25º).
63

Figura 45: Representación de la estela turbulenta de la solución original a 10 metros delsuelo (Caso 10m/s y orientación de 25º).
Figura 46: Representación de la estela turbulenta de la solución interpolada a 10 metros delsuelo (Caso 10m/s y orientación de 25º).
64

Figura 47: Representación de la estela turbulenta de la solución original a 90 metros delsuelo (Caso 10m/s y orientación de 25º).
Figura 48: Representación de la estela turbulenta de la solución interpolada a 90 metros delsuelo (Caso 10m/s y orientación de 25º).
65

Figura 49: Representación de la estela turbulenta de la solución original en una secciónoblicua (Caso 10m/s y orientación de 25º).
Figura 50: Representación de la estela turbulenta de la solución interpolada en una secciónoblicua (Caso 10m/s y orientación de 25º).
66

Figura 51: Líneas de corriente del �ujo medio del caso interpolado(Caso 10 m/s y orientaciónde 25º).
Esta última imagen muestra como la interpolación capta la estructura turbulenta curva-da que se forma tras el edi�cio descrita por [15].
El tensor con el que se ha realizado la interpolación cuenta con un índice que se usapara almacenar las distintas intensidades. Con el �n de que al realizar el HOSVD al tensortodas las intensidades tengan el mismo peso, cada uno de los subtensores de intensidad sedivide por la velocidad en el in�nito del caso ( para los 3 casos de intensidad era 5,15 y 25m/s). Al hacer este proceso, tanto los valores singulares como los modos de cada índice seven modi�cados de manera que para reproducir la solución con un error predeterminado, senecesitarán menos modos que antes. Esto se puede apreciar en las siguientes �guras
67

Figura 52: Valores singulares obtenidos mediante el HOSVD del �ujo medio reescalado.
Figura 53: Valores singulares para los tres primeros armónicos (componente coseno) deltensor reescalado.
68

Figura 54: Valores singulares espaciales reescalados para el �ujo medio reescalado.
Figura 55: Valores singulares espaciales reescalados para la componente coseno de los 3primeros armónicos.
69

70

5 Resultados.
A continuación se presentan los resultados obtenidos en las simulaciones en OpenFOAM.
5.1 Caso estacionario.
Figura 56: Isosuper�cies de vorticidad (caso 5m/s y orientación de 0º).
Figura 57: Isosuper�cie de vorticidad (Caso 5 m/s y orientación de 0º).
71

Figura 58: Isosuper�cies de viscosidad turbulenta (Caso 25 m/s y orientación de 45º).
Figura 59: Isocurvas de viscosidad turbulenta (Caso 25 m/s y orientación de 45º).
72

Figura 60: Curvas isóbaras (Caso 5 m/s y orientación 0º).
Figura 61: Isosuper�cies de energía cinética turbulenta (Caso 5m/s y orientación 0º).
73

Figura 62: Isosuper�cies de vorticidad (Caso 5m/s y orientación 0º).
Nótese como los torbellinos se curvan al llegar a la parte superior del edi�cio formando un�ujo desprendido en forma de herradura.
74

5.2 Caso evolutivo.
Figura 63: Isosuper�cie de vorticidad (Caso 15 m/s y orientación de 27º).
Figura 64: Isosuper�cie de vorticidad (Caso 15 m/s y orientación de 27º).
75
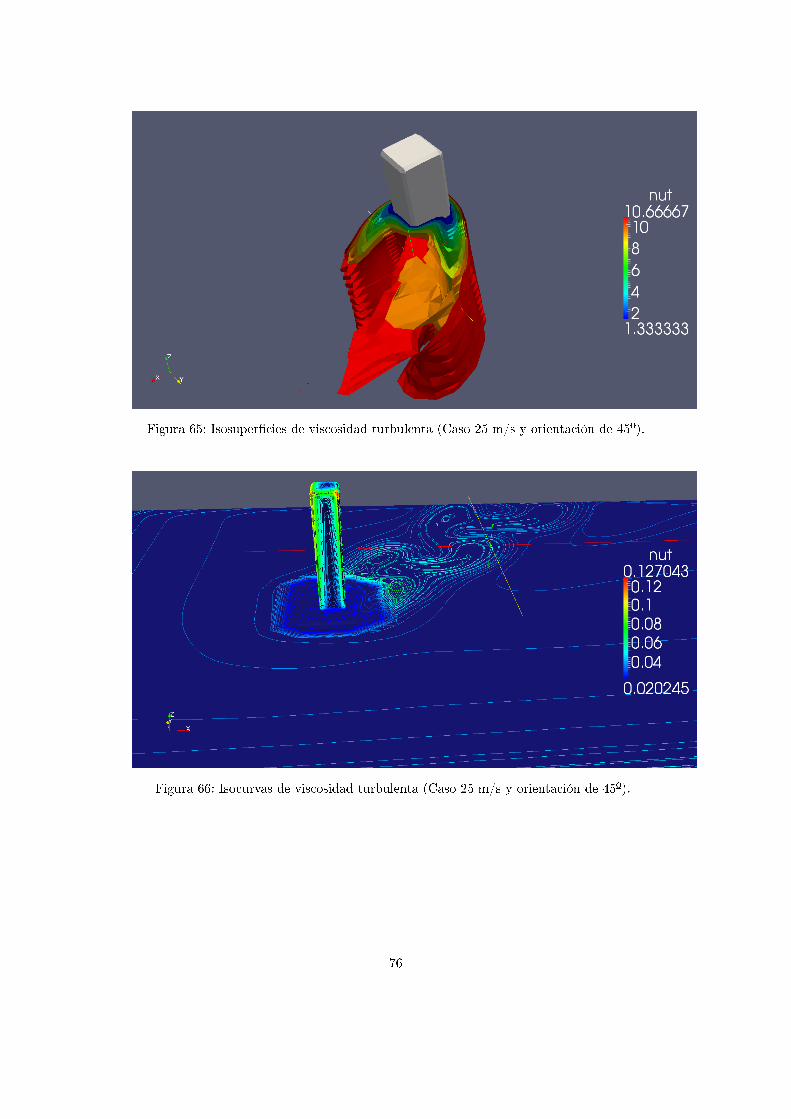
Figura 65: Isosuper�cies de viscosidad turbulenta (Caso 25 m/s y orientación de 45º).
Figura 66: Isocurvas de viscosidad turbulenta (Caso 25 m/s y orientación de 45º).
76

Figura 67: Curvas isóbaras (Caso 25 m/s y orientación 45º).
Figura 68: Curvas isóbaras (Caso 15 m/s y orientación 31.5º).
77

(a) t=T/8 (b) t=T/4
(c) t=3T/8 (d) t=T/2
(e) t=5T/8 (f) t=3T/4
(g) t=7T/8 (h) t=T
Figura 69: Distribución temporal de la presión sobre el suelo (Caso 15 m/s y orientación31.5º)
78

5.3 Cuestiones computacionales.
Todos los cálculos ha sido realizados entre tres clústers, dos de ellos situados en el Departa-mento de Fundamentos Matemáticos de la Escuela Técnica Superior de Ingenieros Aeronaú-ticos (ETSIA-UPM) y otro en el Departamento de Matemática Aplicada II de la Escuela deIngeniería de Telecomunicación (UVigo). Los clústers tienen las siguientes características
hydra2 (ETSIA) hydra3 (ETSIA) mf1 (Vigo)8 núcleos 12 núcleos 8 núcleos3.20GHz 3.64GHz 2.67GHz
48GB RAM 96GB RAM 12GB RAM
Cuadro 16: Características de los clústers empleados.
Los tiempos de cálculo de los estacionarios de este proyecto estaban en torno a los 70segundos de duración. Las simulaciones evolutivas que se comenzaban desde la solución es-tacionaria tenían valores más diferenciados (debido a que cada intensidad se tiene un pasotemporal diferente). Por ello, para llegar a instantes de 2500 segundos en los evolutivos (enuna única dirección) había que emplear una media de 2 horas y 30 minutos para los casosde 5 m/s, 7 horas para los casos de 15 m/s y 12 horas para los casos de 25 m/s. Los tamañosde malla no son excesivamente grandes por lo que en el momento que se incremente la mallay los casos a resolver, el tiempo de cálculo de la base de datos comienza a ser bastante grande.
Por otro lado hay que mencionar el coste computacional que conlleva la interpolación yla reconstrucción de un entorno de 150 puntos. La interpolación llevada a cabo medianteAkima ofrece tiempos de cálculo de 3ms, mientras que reconstruir cada uno de los tensoresdel campo �uido (son 17 en total, correspondientes al �ujo medio y los 8 armónicos) en los95209 puntos tiene un coste de 170ms aproximadamente. En el caso de que sólo se tratasen150 puntos, la interpolación Akima tarda lo mismo y los tiempos de cálculo de los tensoresen los 150 puntos estarían en torno a 5ms cada uno, teniendo en cuenta que el software noestá optimizado para reconstruir los datos.
79

80

6 Conclusiones.
Se ha conseguido la puesta a punto de una metodología para el cálculo de �ujos turbulentosno estacionarios en torno a orografías complejas en tiempo real, que se ha desarrollado alo largo del presente PFC. Por un lado, se de�nió una estrategia de mallado automático deforma e�ciente, que consistía en un re�namiento de las celdas en función de la distancia a losobjetos/escenarios de estudio, lo que se realizaba en un tiempo medio de 16 segundos en elclúster hydra2. Después el siguiente paso fue escoger adecuadamente la estrategia de simula-ción numérica. En este apartado se empleó la solución del caso estacionario para arrancar lasimulación no estacionaria, lo que condujo a una reducción del coste computacional. Ademásse seleccionó el paso temporal adecuado de manera que no se viese afectada la estabilidaddel esquema numérico. Una vez obtenida la base de datos aerodinámicos, a continuación sedesarrolló la herramienta que permitía su explotación en tiempo real. Para ello se utiliza-ron técnicas basadas en una combinación de FFT, herramientas de optimización, métodosde tipo POD/SVD/HOSVD, e interpolación. La validación de las dos herramientas de si-mulación y postprocesado se hizo en función de la bibliografía y de la implementación enOpenFOAM de la metodología de simulación sobre un cilindro circular. Quedaría por hacerun validación de la metodología completa (simulación + postprocesado) para comprobar quela información que se ha obtenido retiene �elmente aquellas escalas que un piloto/instructores capaz de observar sobre un simulador.
El siguiente paso que debería darse sería ver el efecto de un segundo edi�cio de diferentetamaño combinándose en un mismo escenario con el de este proyecto. Es un caso muy in-teresante de estudiar, pues al tener tamaños diferentes, cada uno de los edi�cios tiene unafrecuencia característica de desprendimiento de torbellinos. Si la corriente incide en ellos deforma que no interaccionen sus estelas, las frecuencias que se observarían en el espectro deuna señal de la estela serían las suyas propias. En el momento que interaccionan las estelas,aparecen efectos no lineales y se generan frecuencias combinadas que provienen del productode las mismas.
En relación con el coste computacional, la parte más costosa del proceso �nal es la ob-tención de los datos aerodinámicos mediante OpenFOAM. El coste del cálculo se puedeconsultar en el apartado 5.3. Extrapolando el tiempo CPU a mallas diez veces mayores,que serán necesarias para considerar geometrías urbanas realistas, se obtienen unos tiem-pos de cálculo excesivos. Los elevados requisitos de memoria pueden reducirse combinandoOpenFOAM con los métodos desarrollados en este PFC, que permiten guardar solamenteversiones muy comprimidas de los datos necesarios. Además, el tiempo de cálculo puedereducirse mediante el empleo de modelos reducidos [38,39,42], que se han desarrollado en laETSI Aeronáuticos para una considerable variedad de problemas, incluyendo aerodinámicaestacionaria, subsónica o transónica en dos [40] y tres dimensiones espaciales [41], y tambiénen �ujos �uido-térmicos [37,45], incluyendo problemas de geometría variable [43,44]. De lamisma manera, se han desarrollado modelos para el cálculo rápido de �ujos no estaciona-rios [62,64] y a modelos simpli�cados que presentan dinámicas muy complejas [58,63,65,66].Combinar esas ideas con los resultados de este PFC podrá conducir a herramientas compu-tacionales que proporcionen �ujos aerodinámicos/aeroelásticos en tiempo real, lo cual podráser muy útil con vistas al control y diseño de sistemas aeronáuticos.
81

82

Referencias
[1] P.A. Davidson, Turbulence. An Introduction for Scientist and engineers. Oxford Uni-versity Press, (2004).
[2] D.C. Wilcox. Turbulence Modeling for CFD. DCW Industries, (1998)
[3] A. Liñán. Apuntes de Mecánica de Fluidos. Escuela Técnica Superior de IngenierosAeronaúticos.
[4] S.V. Patankar. Numerical Heat Transfer and Fluid Flow. Taylor & Francis Philadelphia,(1980)
[5] H. Nilsson. MSc/PhD course in CFD with OpenSource software.Chalmers University of Technology, (2013). Disponible en la páginahttp://www.tfd.chalmers.se/~hani/kurser/OS_CFD/
[6] L. Davidson. (2012). A new approach of zonal Hybrid RANS-LES based on a two -equation k = epsilon model in International ERCOFTAC Symposium on TurbulenceModelling and Measurements, Thessaloniki, Greece, (2012)
[7] OpenCFD Ltd. OpenFOAM User Guide. Version 2.0.0 , (2011). Disponible en la páginahttp://www.openfoam.org/docs/
[8] B. Martínez. Modelling of wind �ow over complex terrain using OpenFoam. MSc thesis,Technical University of Denmark (DTU), (2011).
[9] H. Akima. A new method of interpolation and smooth curve �tting based on local pro-cedures. J. ACM, 17(4):589-602, (1970)
[10] L. De Lathauwer, B. De Moor y J. Vandewalle. A multilinear singular value decompo-sition. SIAM J. Matrix Anal. Appl., 21(4):1253-1278, (2000).
[11] Y. Tominaga, A. Mochida, R. Yoshie, H. Kataoka, T. Nozu, M. Yoshikawa y T. Shira-sawa. AIJ guidelines for practical applications of CFD to pedestrian wind environmentaround buildings. Journal of Wind Engineering and Industrial Aerodynamics, 96 (10-11):1749-1761, (2008)
[12] Engys. A Comprehensive Tour of snappyHexMesh, 7th OpenFOAM Workshop (2012).Disponible en la página http://openfoamwiki.net/index.php/SnappyHexMesh
[13] B. Blocken, Y. Tominaga, y T. Stathopoulos. Numerical simulation of dispersion aroundan isolated cubic building: model evaluation of RANS and LES. Building and environ-ment, 45(10), 2231-2239, (2010)
[14] G. Iaccarino y P. Durbin. Unsteady 3D RANS simulations using the v2 - f. Centerfor Turbulence Research (CTR), Stanford University. Annual Research Brief, 263�269,(2000)
[15] G. Iaccarino, A. Ooi, P. Durbin, y M. Behnia. Reynolds averaged simulation of unsteadyseparated �ow. International Journal of Heat and Fluid Flow, 24(2), 147�156, (2003)
[16] S. Liang, S. Liu, Q. S. Li, L. Zhang, y M. Gu. Mathematical model of acrosswinddynamic loads on rectangular tall buildings. Journal of Wind Engineering and IndustrialAerodynamics, 90(12-15), 1757�1770, (2002).
[17] K.F Liaw. Simulation of Flow around Blu� Bodies and Bridge Deck Sections usingCFD. PhD thesis, School of Civil Engineering, University of Nottingham, (2005)
83
[18] H. C. Lim, I. P. Castro, y R. P. Hoxey. Blu� bodies in deep turbulent boundary layers:Reynolds-number issues. Journal of Fluid Mechanics, 571, 97-118, (2007).
[19] H. Lübcke, S. Schmidt, T. Rung, y F. Thiele. Comparison of LES and RANS inblu�-body �ows. Journal of Wind Engineering and Industrial Aerodynamics, 89(14-15),1471�1485, (2001).
[20] C. Mannini, A. �oda, R. Voÿ, y G. Schewe. Unsteady RANS simulations of �ow arounda bridge section. Journal of Wind Engineering and Industrial Aerodynamics, 98(12),742�753, (2010)
[21] S. Perzon y L. Davidson. On CFD and Transient Flow in Vehicle Aerodynamics. SAETechnical paper 2000-01-0873, (2000).
[22] V. Ramesh, S. Vengadesan, y J. L. Narasimhan. 3D unsteady RANS simulation ofturbulent �ow over blu� body by non-linear model. International Journal of NumericalMethods for Heat & Fluid Flow, 16(6), 660�673, (2006)
[23] W. Rodi. Comparison of LES and RANS calculations of the �ow around blu� bodies.Journal of Wind Engineering and Industrial Aerodynamics, (69-71), 55�75,(1997)
[24] A. Roshko. Experiments on the �ow past a circular cylinder at very high Reynoldsnumber. Journal of Fluid Mechanics, 10 (3). pp. 345-356, (1960).
[25] R. Rossi y G. Iaccarino. Numerical analysis and modeling of plume meandering inpassive scalar dispersion downstream of a wall-mounted cube. International Journal ofHeat and Fluid Flow, 43, 137�148, (2013)
[26] S. M. Salim, K. C. Ong y S. C. Cheah. Comparison of RANS , URANS and LES in thePrediction of Air�ow and Pollutant Dispersion in Proceedings of the World Congresson Engineering and Computer Science, (2011),
[27] L. Shi, Z. Yu, y A. J. Jaworski. Investigation into the Strouhal numbers associated withvortex shedding from parallel-plate thermoacoustic stacks in oscillatory �ow conditions.European Journal of Mechanics B/Fluids ,30, 206-217, (2011).
[28] P. Spalart. Strategies for turbulence modelling and simulations. International Journalof Heat and Fluid Flow, 21(3), 252�263, (2000)
[29] J. You, y O. J. Kwon. Numerical Comparisons Between URANS and Hybrid RANS /LES at a High Reynolds Number Flow Using Unstructured Meshes. J. of Aeronautical& Space Sciences, 11(1), 41�48, (2010).
[30] J. Y. You y O. J. Kwon. Numerical assessment of turbulent models at a critical regime onunstructured meshes. Journal of Mechanical Science and Technology, 26(5), 1363�1369,(2012).
[31] L. Davidson. Transport Equations in Incompressible URANS and LES.Chalmers University of Technology, (2006). Disponible en la páginahttp://www.tfd.chalmers.se/~lada/
[32] D. A. Lyn y W. Rodi. The �apping shear layer formed by �ow separation from theforward corner of a square cylinder. Journal of Fluid Mechanics, 267, 353-376, (1994)
[33] L. R. Tucker. Some mathematical notes on three-mode factor analysis. Psychometrika,31:279-311, (1966).
84

[34] H. Jasak. Lecture notes Numerical Solution Algorithms for Compressible Flows. Facultyof Mechanical Engineeringand Naval Architecture, University of Zagreb, (2006).
[35] M. Stanislas, J. Jimenez y I. Marusic. Progress in wall turbulence: Understanding andModeling in Proceedings of the WALLTURB International Workshop held in Lille,(2009)
[36] O. Pironneau, B. Mohammadi. Analysis of the k-Epsilon Turbulence Model. John Wiley& Sons, (1994).
[37] D. Alonso, A. Velázquez, y J. M. Vega Robust reduced order modeling of heat transferin a back step �ow, Int. J. Heat and Mass Transfer 52 (2009) 1149-1157.
[38] D. Alonso, A. Velázquez, y J. M. Vega A method to generate computationally e�cientreduced order models, Comput. Meth. Appl. Mech. Eng., 198 (2009) 2683-2691.
[39] D. Alonso, Reduced order models for industrial thermo-�uid problems, Tesis Doctoral,E.T.S.I. Aeronáuticos, Universidad Politécnica de Madrid, 2009.
[40] D. Alonso, J.M. Vega, y A.Velázquez, Reduced-Order Model for Viscous AerodynamicFlow Past an Airfoil AIAA Journal, 48 (2010), 1946-1958.
[41] D. Alonso, J.M. Vega, A. Velazquez, y V. de Pablo, Reduced order modeling of threedimensional external aerodynamic �ows, J. Aerospace Engrg., 25 (2012), 588-599.
[42] D. Alonso, F. Terragni, A. Velázquez, y J.M. Vega, Reduced order modeling of some�uid �ows of industrial interest, Fluid Dynamics Research, 44 (2012), 031203.
[43] E. Baché, J.M. Vega y A. Velázquez, Model reduction in a back step �uid-thermalproblem with variable geometry, Int. J. Thermal Sci., 49 (2010) 2376-2384.
[44] E. Baché, Reduced order models in �uid-thermal problems with variable geometry ande�cient generation of multi-parameter databases, Tesis Doctoral, E.T.S.I. Aeronáuticos,Universidad Politécnica de Madrid, 2011.
[45] E. Baché, D. Alonso, A. Velázquez, y J.M. Vega, A computationally e�cient reducedorder model to generate multi-parameter �uid-thermal databases, Int. J. Thermal Sci.,52 (2012), 145-153.
[46] T. Bui-Thanh, Proper orthogonal decomposition extensions and their applications insteady aerodynamics, Master's Thesis, Singapore Massachusetts Institute of TechnologyAlliance, 2003.
[47] T. Bui-Thanh, M. Damodaran, and K. Willcox, Aerodynamic data reconstruction andinverse design using proper orthogonal decomposition, AIAA Journal, 42 (2004), 1505-1516.
[48] N. Benito, J.R. Arias, A. Velázquez, y J.M. Vega, Real time performance improvementof engineering control units via high order singular value decomposition: application toa SI engine, Control Eng. Practice, 19 (2011), 1315-1327.
[49] T.G. Kolda and B.W. Bader, Tensor decompositions and applications, SIAM Rev.,51(2009), 455-500.
[50] L. S. Lorente, J. M. Vega y A. Velázquez Generation of Aerodynamic Databases usingHigh Order Singular Value Decomposition, J. Aircraft, 45 (2008) 1779-1788.
85

[51] L.S. Lorente, Generation and post-process of aerodynamic databases via SVD/PODmethods, Tesis Doctoral, E.T.S.I. Aeronáuticos, Universidad Politécnica de Madrid,2009.
[52] L.S. Lorente, J.M. Vega y A. Velázquez, Compression of aerodynamic databases usinghigh order singular value decomposition, Aerosp. Sci. Tech., 14 (2010) 168-177.
[53] L.S. Lorente, J.M. Vega, y A. Velazquez, E�cient computation of the POD manifoldcontaining the information required to generate a multi-parameter aerodynamic data-base, Aerosp. Sci. Tech., 25 (2013), 152-160.
[54] S. de Lucas, J.M. Vega, y A. Velazquez, Aeronautic conceptual design optimizationmethod based on high order singular value decomposition, AIAA Journal, 49 (2011),2713-2725.
[55] S. de Lucas, An optimization method for conceptual design in engineering systemsbased on high order singular value decomposition, Tesis Doctoral, E.T.S.I. Aeronáuticos,Universidad Politécnica de Madrid, 2012.
[56] S. de Lucas, J.M. Vega, y A. Velázquez, Surrogate model for viscous drag in aircraftempennage conceptual design, Aerosp. Sci. Tech., 31 (2013), 99-107.
[57] K. Pearson, On lines and planes of closest �t to systems of points in space. Phil. Mag.2 (1901), 559-572.
[58] M.L. Rapún y J.M. Vega, Reduced order models based on local POD plus Galerkinprojection, J. Comput. Phys., 229 (2010) 3046-3063.
[59] V. da Silva and L. H. Lim, Tensor rank and the ill-posedness of the best low-rankapproximation problem, SIAM J. Matrix Anal. Appl., 30 (2008), 1084-1127.
[60] L. Sirovich, Turbulence and the dynamics of coherent structures, Quat. Appl. Math.XLV (1987), 561-590.
[61] F. Terragni, E. Valero, y J.M. Vega, Local POD plus Galerkin projection in the unsteadylid-driven cavity problem, SIAM J. Sci. Comput., 33 (2011), 3538-3561.
[62] F. Terragni y J.M. Vega, On the use of POD-based ROMs to analyze bifurcations insome dissipative systems, Physica D, 241 (2012), 1393-1405.
[63] F. Terragni, Accelarating CFD via local POD plus Galerkin projection, Tesis Doctoral,E.T.S.I. Aeronáuticos, Universidad Politécnica de Madrid, 2012.
[64] F. Terragni y J.M. Vega, Construction of bifurcation diagrams using POD on the �y,SIAM J. Appl. Dyn. Systems, in press, 2013.
[65] F. Terragni y J.M. Vega, E�cient computation of bifurcation diagrams via adaptiveROMs, Fluid Dynamics Research, in press, 2014.
86

87