a sw suite for formation flying mission analysis and gnc...
TRANSCRIPT
- 1 -
3nd European Workshop on Astrodynamic Tools and Techniques
October 2006
© 2006 DEIMOS Space S.L. – www.deimos-space.com
© 2006 DEIMOS Engenharia, S.A. – www.deimos.com.pt
DEI
MO
S –
FF T
oolb
ox:
SW S
uite
for
For
mat
ion
Flyi
ng
FF ToolboxA SW Suite for Formation
Flying Mission Analysis and
GNC Design
Luis F. PeñínAugusto Caramagno
Space Systems Engineering DivisionDEIMOS Space S.L. & DEIMOS Engenharia

- 2 -
3nd European Workshop on Astrodynamic Tools and Techniques
October 2006
© 2006 DEIMOS Space S.L. – www.deimos-space.com
© 2006 DEIMOS Engenharia, S.A. – www.deimos.com.pt
DEI
MO
S –
FF T
oolb
ox:
SW S
uite
for
For
mat
ion
Flyi
ng
Toolbox DefinitionToolbox Definition
• Objectives:– Analysis and Design of Formation Flying Missions– Evaluation of GNC system design– Testbench for Guidance & Control algorithm evaluation– Performance assessment through Monte Carlo simulation
campaigns• Target User:
– Mission Analysis– GNC System Analyst
• Results of ESA, national and internal projects
- 3 -
3nd European Workshop on Astrodynamic Tools and Techniques
October 2006
© 2006 DEIMOS Space S.L. – www.deimos-space.com
© 2006 DEIMOS Engenharia, S.A. – www.deimos.com.pt
DEI
MO
S –
FF T
oolb
ox:
SW S
uite
for
For
mat
ion
Flyi
ng
DEIMOS FF ActivitiesDEIMOS FF Activities
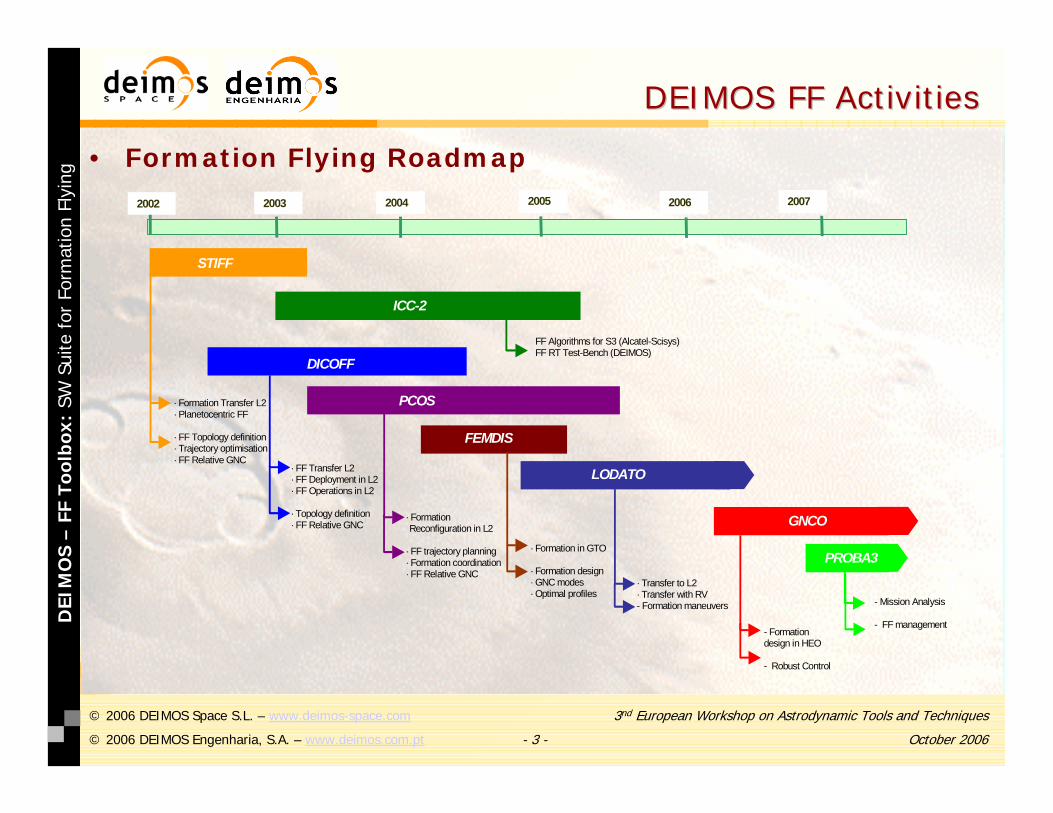
• Formation Flying Roadmap
2002 2003 2004 2005
STIFF
DICOFF
PCOS
FEMDIS
· Formation Transfer L2 · Planetocentric FF · FF Topology definition · Trajectory optimisation · FF Relative GNC · FF Transfer L2
· FF Deployment in L2· FF Operations in L2 · Topology definition · FF Relative GNC
· Formation Reconfiguration in L2
· FF trajectory planning · Formation coordination · FF Relative GNC
· Formation in GTO · Formation design· GNC modes · Optimal profiles
LODATO
· Transfer to L2 · Transfer with RV - Formation maneuvers
ICC-2
FF Algorithms for S3 (Alcatel-Scisys)FF RT Test-Bench (DEIMOS)
2006
GNCO
- Formation design in HEO - Robust Control
2007
PROBA3
- Mission Analysis - FF management

- 4 -
3nd European Workshop on Astrodynamic Tools and Techniques
October 2006
© 2006 DEIMOS Space S.L. – www.deimos-space.com
© 2006 DEIMOS Engenharia, S.A. – www.deimos.com.pt
DEI
MO
S –
FF T
oolb
ox:
SW S
uite
for
For
mat
ion
Flyi
ng
Toolbox ContextToolbox Context
FF Toolbox
GNC analyst
System Studies
Performance indexes and budgets)
)
Technology development programs
Autocoding process
C-code Version
Autocoded simulatorsource files

- 5 -
3nd European Workshop on Astrodynamic Tools and Techniques
October 2006
© 2006 DEIMOS Space S.L. – www.deimos-space.com
© 2006 DEIMOS Engenharia, S.A. – www.deimos.com.pt
DEI
MO
S –
FF T
oolb
ox:
SW S
uite
for
For
mat
ion
Flyi
ng
• Scope of functions
FF FF Toolbox Scope Toolbox Scope (1/2)(1/2)
Orbital environment
(mission phase selection)
Mission requirements
and constraints
Mis
sion
Ana
lysi
s
Absolute trajectory definition
Formation topology definition
GNC modes definition
iterative optimisation
Absolute trajectory
requirements
Relative trajectory
requirementsGNC
Formation GNC
S/C G&C Navigation
GNC architecture
definition Budget
allocation
Control Algorithms
Actuators Sensors
Navigation Algorithms
Allocation of requirements to GNC functions
GNC architecture
GNC Functions
Requirements definition
Mission Analysis & GNC design
Avionics definition

- 6 -
3nd European Workshop on Astrodynamic Tools and Techniques
October 2006
© 2006 DEIMOS Space S.L. – www.deimos-space.com
© 2006 DEIMOS Engenharia, S.A. – www.deimos.com.pt
DEI
MO
S –
FF T
oolb
ox:
SW S
uite
for
For
mat
ion
Flyi
ng
FF FF Toolbox Scope Toolbox Scope (2/2)(2/2)
• Scope of analysis and design capabilities
Closed-loop Design
Closed-loop Analysis
Closed-loop Simulation
Performance Analysis
Dispersion Analysis
Open-loop Simulation
Collision Risk Assessment
OK?
No
YesOpen-loop operation
Closed-loop operation
System Budgets
Requirements and Constraints Verification
OK?
No
Yes

- 7 -
3nd European Workshop on Astrodynamic Tools and Techniques
October 2006
© 2006 DEIMOS Space S.L. – www.deimos-space.com
© 2006 DEIMOS Engenharia, S.A. – www.deimos.com.pt
DEI
MO
S –
FF T
oolb
ox:
SW S
uite
for
For
mat
ion
Flyi
ng
Mission design toolsMission design tools
– Environment• Gravitational perturbations
– Central field– High order harmonics
• Solar radiation pressure• Third body perturbation
– Sun– Moon
– Orbits• Earth arbitrary orbit• Mars arbitrary orbit• Transfer orbit to L2• Halo orbit on L2
Orbital environment
(mission phase selection)
Mission requirements
and constraints
Mis
sion
Ana
lysi
s
Absolute trajectory definition
Formation topology definition
GNC modes definition
iterative optimisation
Absolute trajectory
requirements
Relative trajectory
requirementsGNC
Formation GNC
S/C G&C Navigation
GNC architecture
definition Budget
allocation
Control Algorithms
Actuators Sensors
Navigation Algorithms
Allocation of requirements to GNC functions
GNC architecture
GNC Functions
– Formation topologies• Space & time oriented• Target & orbit oriented• Forced and natural formations• Tight and loose formations

- 8 -
3nd European Workshop on Astrodynamic Tools and Techniques
October 2006
© 2006 DEIMOS Space S.L. – www.deimos-space.com
© 2006 DEIMOS Engenharia, S.A. – www.deimos.com.pt
DEI
MO
S –
FF T
oolb
ox:
SW S
uite
for
For
mat
ion
Flyi
ng
-16 -14 -12 -10 -8 -6 -4 -2 0 2
x 105
-1
-0.5
0
0.5
1x 10
6 Transfer trajectory (low thrust arcs in red)
x synodic axes, km
y sy
nodi
c ax
es, k
m
Earth L2
-14 -12 -10 -8 -6 -4 -2 0 2
x 105
-2
-1
0
1
2
x 105
x synodic axes, km
z sy
nodi
c ax
es, k
m
Earth L2
-2
0
2
4
x 105
-1-0.5
0
0.51
x 106
-1.5
-1
-0.5
0
0.5
1
1.5
x 105
x axis , kmy axis , km
z ax
is, k
m
Low thrust transfer to L2 design
L2 halo orbit design
Arbitrary planetocentric orbit design

- 9 -
3nd European Workshop on Astrodynamic Tools and Techniques
October 2006
© 2006 DEIMOS Space S.L. – www.deimos-space.com
© 2006 DEIMOS Engenharia, S.A. – www.deimos.com.pt
DEI
MO
S –
FF T
oolb
ox:
SW S
uite
for
For
mat
ion
Flyi
ng
Formation Formation planning planning toolstools
– Formation manoeuvres design• Resizing (nominal & optimal)• Rotating (nominal & optimal)• Slewing (nominal & optimal)
– Formation coordination• Nominal coordination• Optimal coordination
– Formation deployment in L2• Lyapunov functions with
continuous thrust • Lyapunov functions with
on/off control • Hybrid strategy deployment• Deployment by layers
Orbital environment
(mission phase selection)
Mission requirements
and constraints
Mis
sion
Ana
lysi
s
Absolute trajectory definition
Formation topology definition
GNC modes
definition
iterative optimisation
Absolute trajectory
requirements
Relative trajectory
requirementsGNC
Formation GNC
S/C G&C Navigation
GNC architecture
definition Budget
allocation
Control Algorithms
Actuators Sensors
Navigation Algorithms
Allocation of requirements to GNC functions
GNC architecture
GNC Functions
In collaboration with University of Barcelona - IEEC
- 10 -
3nd European Workshop on Astrodynamic Tools and Techniques
October 2006
© 2006 DEIMOS Space S.L. – www.deimos-space.com
© 2006 DEIMOS Engenharia, S.A. – www.deimos.com.pt
DEI
MO
S –
FF T
oolb
ox:
SW S
uite
for
For
mat
ion
Flyi
ng
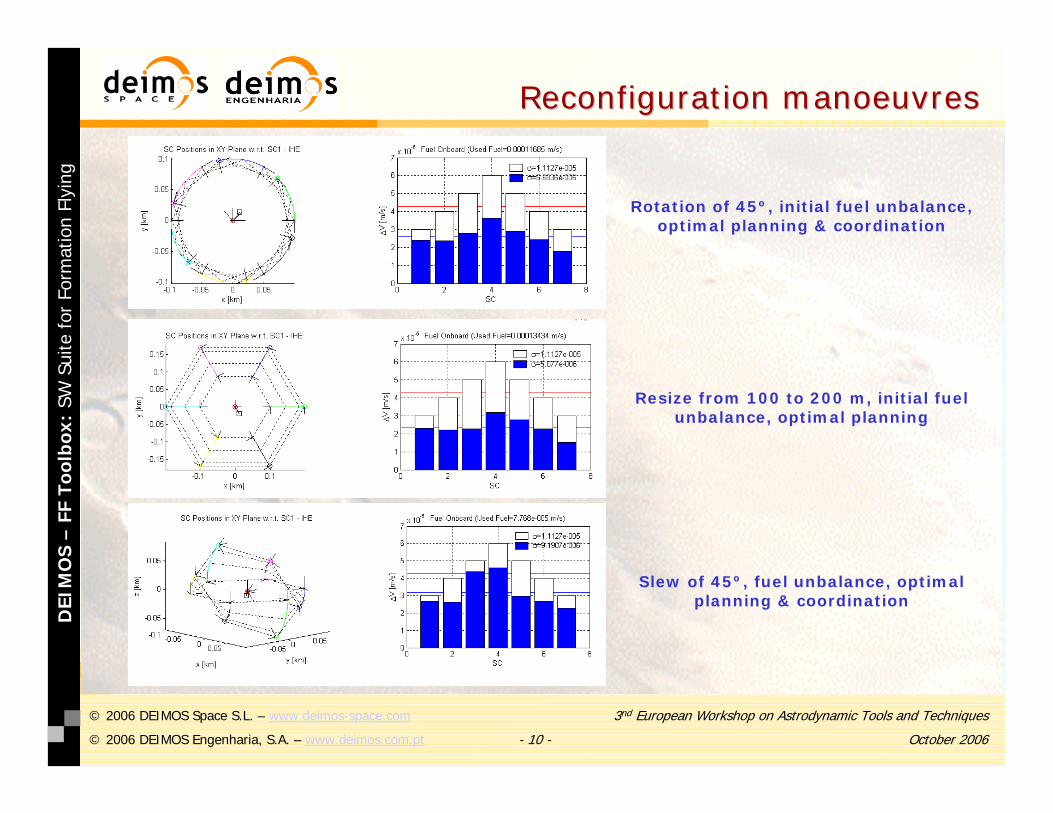
Reconfiguration manoeuvresReconfiguration manoeuvres
Resize from 100 to 200 m, initial fuel unbalance, optimal planning
Rotation of 45º, initial fuel unbalance, optimal planning & coordination
Slew of 45º, fuel unbalance, optimal planning & coordination

- 11 -
3nd European Workshop on Astrodynamic Tools and Techniques
October 2006
© 2006 DEIMOS Space S.L. – www.deimos-space.com
© 2006 DEIMOS Engenharia, S.A. – www.deimos.com.pt
DEI
MO
S –
FF T
oolb
ox:
SW S
uite
for
For
mat
ion
Flyi
ng
Deployment manoeuvresDeployment manoeuvres
Formation deployment with Lyapunov functions from a random disposition in L2

- 12 -
3nd European Workshop on Astrodynamic Tools and Techniques
October 2006
© 2006 DEIMOS Space S.L. – www.deimos-space.com
© 2006 DEIMOS Engenharia, S.A. – www.deimos.com.pt
DEI
MO
S –
FF T
oolb
ox:
SW S
uite
for
For
mat
ion
Flyi
ng
Spacecraft Spacecraft GNC GNC functionsfunctions
– Spacecraft guidance & control• Relative reference traj.design
– Based on position/velocity– Based on time
• Gravity gradient FFW• MIMO controllers design
– Two-body problem– Three-body problem
– Formation navigation• Peer-to-peer navigation• Least squares estimation• Performance models
Orbital environment
(mission phase selection)
Mission requirements
and constraints
Mis
sion
Ana
lysi
s
Absolute trajectory definition
Formation topology definition
GNC modes
definition
iterative optimisation
Absolute trajectory
requirements
Relative trajectory
requirementsGNC
Formation GNC
S/C G&C Navigation
GNC architecture
definition Budget
allocation
Control Algorithms
Actuators Sensors
Navigation Algorithms
Allocation of requirements to GNC functions
GNC architecture
GNC Functions
– Actuators• FEEPs thrusters• Optimal Thrust
Assignment Unit
– Sensors• RF-based relative navigation • Laser-based relative navigation• Inertial Measurement Unit• Star tracker
- 13 -
3nd European Workshop on Astrodynamic Tools and Techniques
October 2006
© 2006 DEIMOS Space S.L. – www.deimos-space.com
© 2006 DEIMOS Engenharia, S.A. – www.deimos.com.pt
DEI
MO
S –
FF T
oolb
ox:
SW S
uite
for
For
mat
ion
Flyi
ng
S/C S/C Guidance and Guidance and ControlControl
Centralbody
Master (C)
Flyer
rvδ
rv
Crv
θ
Pericenter
we
ue
ve
Inertial frame (0)
Intermediate frame (S)
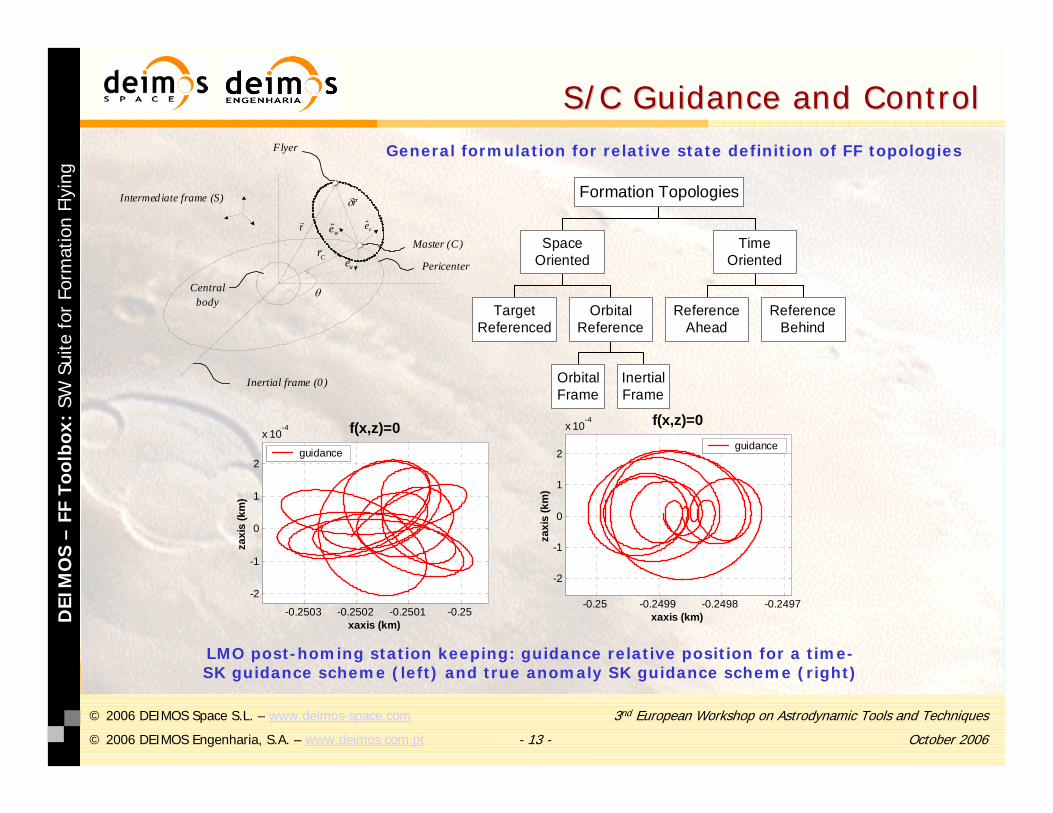
General formulation for relative state definition of FF topologies
TargetReferenced
OrbitalFrame
InertialFrame
OrbitalReference
SpaceOriented
ReferenceAhead
ReferenceBehind
TimeOriented
Formation Topologies
-0.2503 -0.2502 -0.2501 -0.25
-2
-1
0
1
2
x 10-4
xaxis (km)
zaxi
s (k
m)
f(x,z)=0guidance
-0.25 -0.2499 -0.2498 -0.2497
-2
-1
0
1
2
x 10-4
xaxis (km)
zaxi
s (k
m)
f(x,z)=0guidance
LMO post-homing station keeping: guidance relative position for a time-SK guidance scheme (left) and true anomaly SK guidance scheme (right)

- 14 -
3nd European Workshop on Astrodynamic Tools and Techniques
October 2006
© 2006 DEIMOS Space S.L. – www.deimos-space.com
© 2006 DEIMOS Engenharia, S.A. – www.deimos.com.pt
DEI
MO
S –
FF T
oolb
ox:
SW S
uite
for
For
mat
ion
Flyi
ng
Control error Control error exampleexample
LMO post-homing SK: Time-SK closed-loop simulation (ideal GNC).
0 0.5 1 1.5 20
0.2
0.4
0.6
0.8Control Error (RF)
no. orbits
erro
r(m)
lqr1lqr2
0 0.5 1 1.5 20
0.5
1
1.5
2x 10
-5 Control (RF)
no. orbits
Con
trol a
ccel
erat
ion(
m/s
2 ) lqr1lqr2
0 0.5 1 1.5 20
0.05
0.1
0.15
0.2Budgets (FEEP+RF)
no. orbits
ΔV(
m/s
)
lqr1lqr2
HMO close holding at -20 m: performances of different controllers (FEEP + RF)
LQR1: minimise consumption; LQR2: minimise control error

- 15 -
3nd European Workshop on Astrodynamic Tools and Techniques
October 2006
© 2006 DEIMOS Space S.L. – www.deimos-space.com
© 2006 DEIMOS Engenharia, S.A. – www.deimos.com.pt
DEI
MO
S –
FF T
oolb
ox:
SW S
uite
for
For
mat
ion
Flyi
ng
Controller design toolsController design tools
– Controller design• Scenarios
– Two body problem– Three body problem
• Controllers– SISO controller– MIMO SVF controller– MIMO LQR controller
– Controller analysis• Nominal stability• Nominal performance• Robust stability• Robust performance
Closed-loop Design
Closed-loop Analysis
Closed-loop Simulation
Performance Analysis
Dispersion Analysis
Open-loop Simulation
Collision Risk Assessment
OK?
No
YesOpen-loop operation
Closed-loop operation
System Budgets
Requirements and Constraints Verification
OK?
No
Yes

- 16 -
3nd European Workshop on Astrodynamic Tools and Techniques
October 2006
© 2006 DEIMOS Space S.L. – www.deimos-space.com
© 2006 DEIMOS Engenharia, S.A. – www.deimos.com.pt
DEI
MO
S –
FF T
oolb
ox:
SW S
uite
for
For
mat
ion
Flyi
ng
Controllers AnalysisControllers Analysis
10-5
10-4
10-3
10-2
10-1
100
101
102
-90
-80
-70
-60
-50
-40
-30
-20
-10
0
10Maximum singular values of the sensitivity (S)
Frequency (rad(s)
Sin
gula
r val
ues
(db)
siso0svf0lqr1lqr3lqr5Wp
10-5
10-4
10-3
10-2
10-1
100
101
102
-40
-20
0
20
40
60
80
100Robus t performance upon diagonal input uncertainty
Frequency (rad(s )
Sin
gula
r val
ues
(db)
s is o0s vf0lqr1lqr3lqr5
Bode Magnitude Diagram
Frequency (rad/s ec)
Mag
nitu
de (a
bs)
10-5
100
10-20
100
Bode Magnitude Diagram
Frequency (rad/s ec)
Mag
nitu
de (a
bs)
10-5
100
10-20
100 Bode Magnitude Diagram
Frequency (rad/s ec)
Mag
nitu
de (a
bs)
10-5
100
10-20
100
Bode Magnitude Diagram
Frequency (rad/s ec)
Mag
nitu
de (a
bs)
10-5
100
10-20
100 Bode Magnitude Diagram
Frequency (rad/s ec)
Mag
nitu
de (a
bs)
10-5
100
10-20
10-10
100 Bode Magnitude Diagram
Frequency (rad/s ec)
Mag
nitu
de (a
bs)
10-5
100
10-20
100
Bode Magnitude Diagram
Frequency (rad/s ec)
Mag
nitu
de (a
bs)
10-5
100
10-20
100
Bode Magnitude Diagram
Frequency (rad/s ec)M
agni
tude
(abs
)
10-5
100
10-20
10-10
100 Bode Magnitude Diagram
Frequency (rad/s ec)
Mag
nitu
de (a
bs)
10-5
100
10-20
100
Nominal and robust performance analysis of different controllers
Uncertainty definition

- 17 -
3nd European Workshop on Astrodynamic Tools and Techniques
October 2006
© 2006 DEIMOS Space S.L. – www.deimos-space.com
© 2006 DEIMOS Engenharia, S.A. – www.deimos.com.pt
DEI
MO
S –
FF T
oolb
ox:
SW S
uite
for
For
mat
ion
Flyi
ng
Simulation and analysis toolsSimulation and analysis tools
– Simulations• Scenarios
– Mars planetocentric– Earth planetocentric– Transfer to L2– Halo orbit around L2
• Types– Open-loop– Closed-loop– Selective perturbations
– Performance Analysis• Monte-Carlo analysis• Parametric analysis• Time domain analysis• Control effort analysis• Communication analysis
Closed-loop Design
Closed-loop Analysis
Closed-loop Simulation
Performance Analysis
Dispersion Analysis
Open-loop Simulation
Collision Risk Assessment
OK?
No
YesOpen-loop operation
Closed-loop operation
System Budgets
Requirements and Constraints Verification
OK?
No
Yes

- 18 -
3nd European Workshop on Astrodynamic Tools and Techniques
October 2006
© 2006 DEIMOS Space S.L. – www.deimos-space.com
© 2006 DEIMOS Engenharia, S.A. – www.deimos.com.pt
DEI
MO
S –
FF T
oolb
ox:
SW S
uite
for
For
mat
ion
Flyi
ng
Transfer Transfer L2 L2 OpenOpen--loop Simloop Sim
0 0.5 1-20
0
20
40
60
80
100Relative position
% transfer
xrot
(km
)Δx(t0)=100mΔy(t0)=100mΔz(t0)=100m
0 0.5 1-80
-60
-40
-20
0
20Relative position
% transfer
yrot
(km
)
Δx(t0)=100mΔy(t0)=100mΔz(t0)=100m
0 0.5 1-20
-15
-10
-5
0
5Relative position
% transfer
zrot
(km
)
Δx(t0)=100mΔy(t0)=100mΔz(t0)=100m
0.999 0.9995 1
3.14
3.15
3.16
3.17
3.18
3.19
3.2x 10
4 Relative position
% transfer
xrot
(km
)
Δx(t0)=100mΔy(t0)=100mΔz(t0)=100m
(with radiation pressure)
0.997 0.998 0.999 1
-2.24
-2.23
-2.22
-2.21
-2.2
x 104
Relative position
% transfer
yrot
(km
)
Δx(t0)=100mΔy(t0)=100mΔz(t0)=100m
(with radiation pressure)
0.999 0.9995 1
-5495
-5490
-5485
-5480
-5475
-5470
-5465
-5460
Relative position
% transfer
zrot
(km
)
Δx(t0)=100mΔy(t0)=100mΔz(t0)=100m
(with radiation pressure)
Comparison of relative position evolution for different initial deltas in position. Upper row with no SRP, lower row with SRP.

- 19 -
3nd European Workshop on Astrodynamic Tools and Techniques
October 2006
© 2006 DEIMOS Space S.L. – www.deimos-space.com
© 2006 DEIMOS Engenharia, S.A. – www.deimos.com.pt
DEI
MO
S –
FF T
oolb
ox:
SW S
uite
for
For
mat
ion
Flyi
ng
Communication AnalysisCommunication Analysis
Parametric analysis of the effect of communication latency (s) in different parameters of a resize manoeuvre.
- 20 -
3nd European Workshop on Astrodynamic Tools and Techniques
October 2006
© 2006 DEIMOS Space S.L. – www.deimos-space.com
© 2006 DEIMOS Engenharia, S.A. – www.deimos.com.pt
DEI
MO
S –
FF T
oolb
ox:
SW S
uite
for
For
mat
ion
Flyi
ng
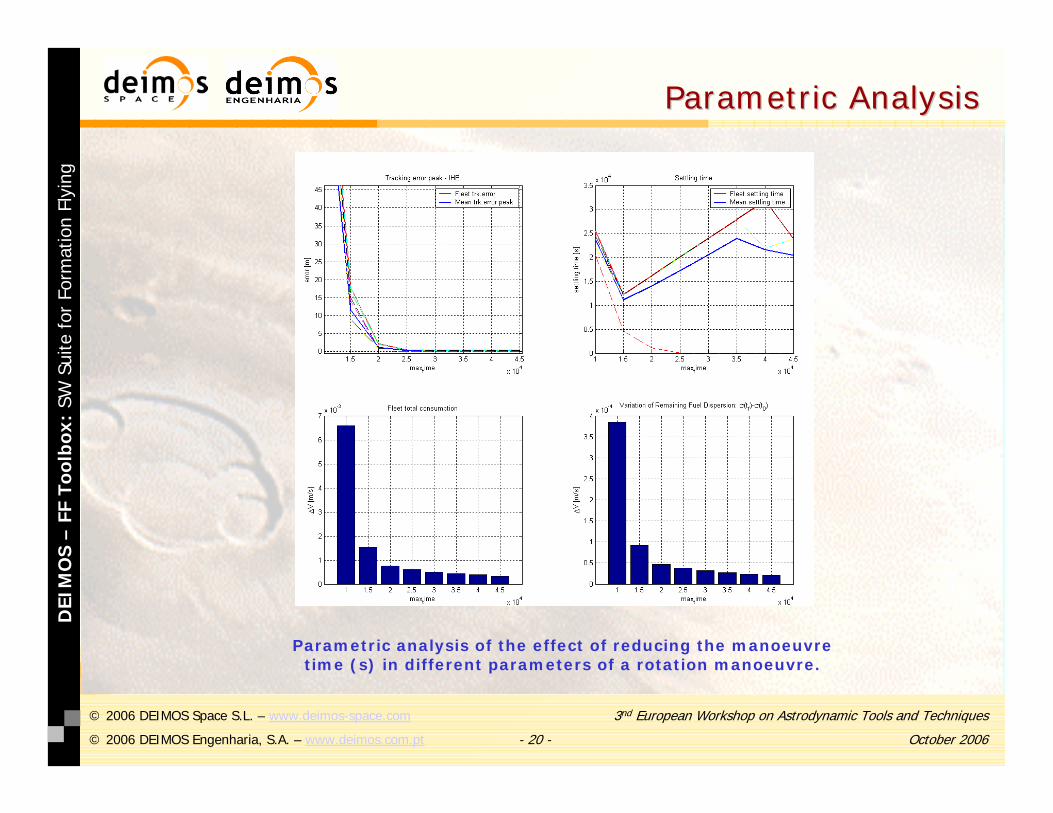
Parametric AnalysisParametric Analysis
Parametric analysis of the effect of reducing the manoeuvre time (s) in different parameters of a rotation manoeuvre.

- 21 -
3nd European Workshop on Astrodynamic Tools and Techniques
October 2006
© 2006 DEIMOS Space S.L. – www.deimos-space.com
© 2006 DEIMOS Engenharia, S.A. – www.deimos.com.pt
DEI
MO
S –
FF T
oolb
ox:
SW S
uite
for
For
mat
ion
Flyi
ng
MonteMonte--Carlo SimulationCarlo Simulation
-26.8 -26.6 -26.4 -26.2 -26 -25.8-2576.6
-2576.5
-2576.4
-2576.3
-2576.2
-2576.1
xaxis , km
yaxi
s, k
m
-26.8 -26.6 -26.4 -26.2 -26 -25.8-2573.2
-2573.15
-2573.1
-2573.05
-2573
-2572.95
-2572.9
-2572.85
xaxis , km
zaxi
s, k
m
-2573.2-2573.15-2573.1-2573.05 -2573 -2572.95-2572.9-2572.85-2576.6
-2576.5
-2576.4
-2576.3
-2576.2
-2576.1
zaxis , km
yaxi
s, k
m
Final 1-sigma and 2-sigma position dispersion ellipsoid and Monte-Carlo absolute trajectory
points for SK in Mars Orbit

- 22 -
3nd European Workshop on Astrodynamic Tools and Techniques
October 2006
© 2006 DEIMOS Space S.L. – www.deimos-space.com
© 2006 DEIMOS Engenharia, S.A. – www.deimos.com.pt
DEI
MO
S –
FF T
oolb
ox:
SW S
uite
for
For
mat
ion
Flyi
ng
Analysis toolsAnalysis tools
– Dispersion analysis• Analytical propagation• Numerical propagation
– Without perturbations– Extended with air drag
– Collision risk Assessment• Based on dispersion matrix
– System budgets• Total formation ΔV • Spacecraft ΔV • Required control bandwidth• Communication effort
Closed-loop Design
Closed-loop Analysis
Closed-loop Simulation
Performance Analysis
Dispersion Analysis
Open-loop Simulation
Collision Risk Assessment
OK?
No
YesOpen-loop operation
Closed-loop operation
System Budgets
Requirements and Constraints Verification
OK?
No
Yes

- 23 -
3nd European Workshop on Astrodynamic Tools and Techniques
October 2006
© 2006 DEIMOS Space S.L. – www.deimos-space.com
© 2006 DEIMOS Engenharia, S.A. – www.deimos.com.pt
DEI
MO
S –
FF T
oolb
ox:
SW S
uite
for
For
mat
ion
Flyi
ng
Dispersion and Collision RiskDispersion and Collision Risk
Evolution of position dispersion ellipsoid of satellite 1 after 1 orbit in an InSAR C-Band
formation
(initial dispersion 10 cm in position and 0.1 mm/s in velocity)
(40x40 m baseline)
0 2000 4000 6000 8000 10000 120000
0.01
0.02
0.03
0.04
0.05
0.06
0.07Collis ion ris k as s es s ment validation
Pro
babi
lity
of c
ollis
ion
S amples
ComputedMonte-Carlo
Monte-Carlo validation of the algorithm for computing the probability of collision
0.014 0.016 0.018 0.02 0.022 0.024 0.026 0.028-0.03
-0.02
-0.01
0
0.01
0.02
0.03Relative pos ition
xaxis , km
yaxi
s, k
m
0.014 0.016 0.018 0.02 0.022 0.024 0.026 0.028-1.5
-1
-0.5
0
0.5
1
1.5x 10
-3
xaxis , km
zaxi
s, k
m
-1.5 -1 -0.5 0 0.5 1 1.5
x 10-3
-0.03
-0.02
-0.01
0
0.01
0.02
0.03
zaxis , km
yaxi
s, k
m
0.01
0.02
0.03
-0.04-0.020
0.020.04
-2
-1
0
1
2
x 10-3
xaxis , kmyaxis , km
zaxi
s, k
m

- 24 -
3nd European Workshop on Astrodynamic Tools and Techniques
October 2006
© 2006 DEIMOS Space S.L. – www.deimos-space.com
© 2006 DEIMOS Engenharia, S.A. – www.deimos.com.pt
DEI
MO
S –
FF T
oolb
ox:
SW S
uite
for
For
mat
ion
Flyi
ng
System budgetsSystem budgets
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
0.02
0.04
0.06
0.08
0.1
0.12
0.14
0.16
0.18
0.2Budgets (ideal)
no. orbits
ΔV(
m/s
)
lqr2lqr3lqr4sisosvf
Example of total ΔV with different controllers
Example of DV consumed by each S/C during a resizing manoeuvre

- 25 -
3nd European Workshop on Astrodynamic Tools and Techniques
October 2006
© 2006 DEIMOS Space S.L. – www.deimos-space.com
© 2006 DEIMOS Engenharia, S.A. – www.deimos.com.pt
DEI
MO
S –
FF T
oolb
ox:
SW S
uite
for
For
mat
ion
Flyi
ng
Common infrastructure (1/2)Common infrastructure (1/2)
Dynamics & Kinematics
On-Board Systems
Rea
l Wor
ld
MAN MACHINE INTERFACE
MONTE CARLO SIMULATION
Environment
GNC Algorithms
SIMULATION CORE
Sensors
SIMULATION ENGINE
Mission Definition Core Driver
Model Configuration
Actuators
Raw Data Logging
VISUALIZATION
Post-Processed
Data Raw Data
POST−PROCESSING
Configuration Data Files
COVARIANCE ANALYSIS TOOL
Fault Injection
AMM
FDIR
AUXILIARY TOOLS
Control analysis
Dispersion analysis
Auto-coding Mission profile design
S/C modeling tool

- 26 -
3nd European Workshop on Astrodynamic Tools and Techniques
October 2006
© 2006 DEIMOS Space S.L. – www.deimos-space.com
© 2006 DEIMOS Engenharia, S.A. – www.deimos.com.pt
DEI
MO
S –
FF T
oolb
ox:
SW S
uite
for
For
mat
ion
Flyi
ng
Common infrastructure Common infrastructure (2/(2/2)2)• XML Input Files
File Data
Structure
Data Elements
Replications of theData Structure
Replication of DataElements

- 27 -
3nd European Workshop on Astrodynamic Tools and Techniques
October 2006
© 2006 DEIMOS Space S.L. – www.deimos-space.com
© 2006 DEIMOS Engenharia, S.A. – www.deimos.com.pt
DEI
MO
S –
FF T
oolb
ox:
SW S
uite
for
For
mat
ion
Flyi
ng
Common Infrastructure Common Infrastructure (3/3)(3/3)
• Man-machine interface– Matlab command-line– Menu based
• Operational Environment– Matlab– Simulink– ANSI-C, (embedded in Simulink S-functions)
1. Closed-loop Design & Analysis 2. OL/CL Simulation 3. Performance Analysis 4. Open-loop Analysis Make a selection from the list above (0=Back)(default=1):
Simulation file selection OL/CL Simulation ------------------------------------------------------------- 1. simulation-mars.txt 2. simulation-tlp.txt 3. simulation.txt Make a selection from the list above (0=Back)(default=1): Simulation selection Performance Analysis
------------------------------------------------------------- 1. SimID: OL MissID: MARS Date: 20030304 Time: 1231337 2. SimID: OL MissID: MARS Date: 20030304 Time: 1251249 Make a selection from the list above (0=Back)(default=1):