a quadruped robot with redundant dofs for adaptation on
TRANSCRIPT

저 시-비 리- 경 지 2.0 한민
는 아래 조건 르는 경 에 한하여 게
l 저 물 복제, 포, 전송, 전시, 공연 송할 수 습니다.
다 과 같 조건 라야 합니다:
l 하는, 저 물 나 포 경 , 저 물에 적 된 허락조건 명확하게 나타내어야 합니다.
l 저 터 허가를 면 러한 조건들 적 되지 않습니다.
저 에 른 리는 내 에 하여 향 지 않습니다.
것 허락규약(Legal Code) 해하 쉽게 약한 것 니다.
Disclaimer
저 시. 하는 원저 를 시하여야 합니다.
비 리. 하는 저 물 리 목적 할 수 없습니다.
경 지. 하는 저 물 개 , 형 또는 가공할 수 없습니다.

Master's Thesis
Kinematic Analysis and Path Planning Algorithms of
a Quadruped Robot with Redundant DOFs for
Adaptation on Complex Environment
Hyunkyoo Park
Department of Mechanical Engineering
Graduate School of UNIST
2018

Kinematic Analysis and Path Planning Algorithms of
a Quadruped Robot with Redundant DOFs for
Adaptation on Complex Environment
Hyunkyoo Park
Department of Mechanical Engineering
Graduate School of UNIST

Kinematic Analysis and Path Planning Algorithms of
a Quadruped Robot with Redundant DOFs for
Adaptation on Complex Environment
A thesis/dissertation
submitted to the Graduate School of UNIST
in partial fulfillment of the
requirements for the degree of
Master of Science
Hyunkyoo Park
18. 01. 08
Approved by
_________________________
Advisor
Joonbum Bae

Kinematic Analysis and Path Planning Algorithms of
a Quadruped Robot with Redundant DOFs for
Adaptation on Complex Environment
Hyunkyoo Park
This certifies that the thesis/dissertation of Hyunkyoo Park is approved.
01. 08. 2018
signature
___________________________
Advisor: Joonbum Bae
signature
___________________________
Hungsun Son
signature
___________________________
Sang Hoon Kang

Abstract
This thesis presents a kinematic analysis and path planning algorithms for a quadruped robot with
redundant degrees of freedom (DOFs). The kinematically redundant leg can exploit its redundancy for
various types of locomotion and manipulation. Unlike previously developed quadruped robots, the
proposed robot can suitably adapt to different environments by changing its body posture. For example,
the robot can walk on a plain terrain, pass through a narrow gap, overcome an obstacle, perform a simple
task by using one of its legs as a manipulator, etc. The proposed robot has 7 DOFs in each leg and its
inverse kinematics was analyzed by a newly proposed method: a modified Improved Jacobian
Pseudoinverse (mIJP) algorithm. Previously, an Improved Jacobian Pseudoinverse (IJP) algorithm was
proposed to reduce sharp error at the early stage of the trajectory when the initial posture of the
manipulator is closed to the singularity. However, the IJP algorithm has a necessary condition that the
calculated final position of the end-effector to be converged to the desired position. The mIJP algorithm
is proposed to control the manipulator without such requirement.
Also, a center of gravity (COG) trajectory planning method for the proposed quadruped robot is
proposed in this thesis. The robot has significant COG movement during leg swing phase due to its
heavy weight leg, which is not desired because it may cause instability. Thus, we proposed a new COG
trajectory planning algorithm for stable and efficient walking even though the undesired COG
movement was occurred. By using a combined Jacobian of COG and centroid of a support polygon (SP)
with constraints of foot contact points, all calculations could be conducted in the local frame, and
improved performance for tracking the desired trajectory of COG was attained. Performance of the
proposed method was verified in both simulations and experiments.

Contents
I. Introduction ---------------------------------------------------------------------------------------------1
II. System Analysis ----------------------------------------------------------------------------------------5
1. System Configuration ----------------------------------------------------------------------------5
2. Single-leg Kinematic Analysis ------------------------------------------------------------------7
3. Foot Design ---------------------------------------------------------------------------------------11
III. Modified Improved Jacobian Pseudoinverse (mIJP) Algorithm ---------------------------------13
1. Weighted Least Norm (WLN) method --------------------------------------------------------13
2. Improved Jacobian Pseudoinverse (IJP) Algorithm -----------------------------------------14
3. Modified Improved Jacobian Pseudoinverse (mIJP) Algorithm ---------------------------17
IV. A COG Trajectory Planning Method ----------------------------------------------------------------19
1. Walking Mechanism -----------------------------------------------------------------------------19
2. Stability Criteria ---------------------------------------------------------------------------------22
3. Gait Sequence ------------------------------------------------------------------------------------23
4. A COG Trajectory Planning Method ----------------------------------------------------------25
V. Performance verification by Simulations and Experiments -------------------------------------34
1. Simulation Results -------------------------------------------------------------------------------34
2. Experimental Results ----------------------------------------------------------------------------38
VI. Conclusion and Open Issues -------------------------------------------------------------------------42

List of Figures
Fig. I.1 Previously developed octopus inspired robot
Fig. I.2 The proposed quadruped robots which have 6 joints and 7 joints in each leg
Fig. I.3 Previously developed quadruped robot.
Fig. II.1 The proposed advanced quadruped robot
Fig. II.2 Attached reference frames on the robot
Fig. II.3 Representation of Euler angles ZYZ
Fig. II.4 Considered foot design
Fig. III.1 Joint values during trajectory following
Fig. III.2 Simulation results of the inverse kinematics of the robot’s leg with IJP algorithm
Fig. III.3 Simulation results of the inverse kinematics of the robot’s leg with mIJP algorithm
Fig. IV.1 Static walking
Fig. IV.2 Dynamic walking
Fig. IV.3 Cart-table model of a quadruped robot
Fig. IV.4 Stance posture of the quadruped robot
Fig. IV.5 Definition of longitudinal stability margin
Fig. IV.6 A quadruped robot static walking gait sequences start with leg 1
Fig. IV.7 Double support polygon for two left legs
Fig. IV.8 The undesired COG movement during two right legs swing sequentially
Fig. IV. 9 The COG shift methods.
Fig. IV.10 The proposed position difference vector between the COG and centroid
Fig. IV.11 The position vectors of each leg
Fig. IV.12 Simulation results to coincide the COG to the figure 8 trajectory

Fig. IV.13 The flowchart of the proposed COG trajectory planning algorithm
Fig. IV.14 COG shift plan before two right-side legs swing
Fig. V.1 Snapshots of walking on the plain terrain of the robot during the simulation
Fig. V.2 Simulation results when the robot was commanded to walk on the plain terrain
Fig. V.3 Snapshots of avoiding an obstacle by changing height of the robot during the simulation
Fig. V.4 Snapshots of using one leg as a manipulator of the robot during the simulation
Fig. V.5 Snapshots of passing through a narrow gap of the robot during the simulation
Fig. V.6 Snapshots of walking on the plain terrain of the robot during the experiment
Fig. V.7 Snapshots of avoiding and obstacle by changing height of the robot during the experiment
Fig. V.8 Snapshots of using one leg as a manipulator of the robot during the experiment
Fig. V.9 Snapshots of passing through a narrow gap of the robot during the experiment

List of Tables
Table II.1 Types of manipulator
Table II.2 The specification of the proposed robot
Table II.3 DH table of the single leg

1
I. Introduction
An octopus has eight versatile and compliant legs that can serve as multi-functional purposes such as
grasping, crawling, catching a prey, etc. As shown in Fig. I.1-(a) and (b), several robotic systems have
been developed to mimic the mobility of an octopus by mostly utilizing soft material in underwater [1-
2]. However, those soft robots are lack of versatile mobility on the ground, and thus alternative approach
needs to be investigated.
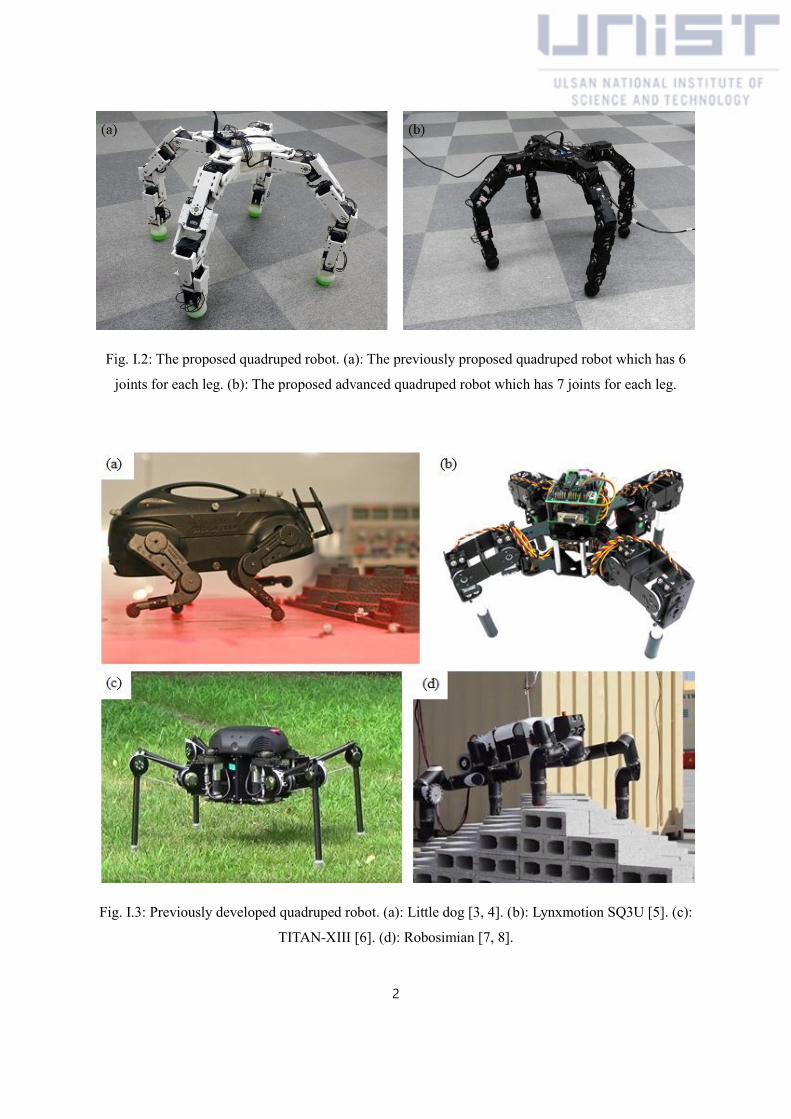
In this thesis, previously, a quadruped robot that has 6 joints in each leg (24 DOFs in total) which only
consider the position of the end-effector was proposed to achieve high degree of functionality and
adaptation in various environments as in Fig. I.2-(a). However, the orientation of the end-effector was
critical for maintaining the stable posture of the robot because the robot easily tumbled due to
inadequate end-effector's orientation. Therefore, we propose an advanced quadruped robot that has 7
joints for each leg as shown in Fig. I.2-(b).
Compared with the similar size of quadruped robot like in Fig. I.3-(a) to (c), our robot was developed
for high-degree of functionality and adaptation in various environments. For example, our robot can
walk on a plain terrain, cross over an obstacle, and pass through a narrow gap by changing its body
posture. Also, the robot can perform a simple task, such as clearing a path, by using one of its leg as a
manipulator. Another similar robot named RoboSimian in Fig. I.3-(c) and (d) has highly dexterous four
7 DOFs limbs for both locomotion and manipulation [7, 8]. To control such high DOFs limbs, an inverse
kinematics look-up table together with a gradient based algorithm was used. However, the proposed
robot is mainly relied on the differential kinematics for the fast calculation time.
Fig. I.1: Previously developed octopus inspired robot [1-2].
2
Fig. I.2: The proposed quadruped robot. (a): The previously proposed quadruped robot which has 6
joints for each leg. (b): The proposed advanced quadruped robot which has 7 joints for each leg.
Fig. I.3: Previously developed quadruped robot. (a): Little dog [3, 4]. (b): Lynxmotion SQ3U [5]. (c):
TITAN-XIII [6]. (d): Robosimian [7, 8].

3
A manipulator which has more degrees of freedom (DOFs) than required for a given task as the
proposed robot leg is called a redundant manipulator. For example, when we consider the position and
orientation both in 3D space, manipulators which have more than 6 DOFs are called redundant
manipulator. A redundant manipulator is typically exploited to perform multiple tasks such as avoiding
the joint limit, obstacles in the workspace, singularities, etc [9].
Many algorithmic approaches have been proposed to control a redundant manipulator. In [10], the
weighted least-norm (WLN) solution was proposed to ensure joint limit avoidance by avoiding
unnecessary self-motions and oscillation. Solving inverse kinematic problems for redundant
manipulators under the two constraints (avoidance of obstacle and joint limits) was introduced in [11]
using the extended Jacobian matrix. Also, a general scheme to manage multiple tasks using a task
priority strategy for redundant robots was studied in [12]. Widely used closed-loop inverse kinematics
methods are well summarized in [13] including damping and filtering of singular values with two
enhancements. A rather different approach was studied in [14] using a modified Newton-Raphson
method with a step size control technique. A method of joint velocity/acceleration redistribution for a
redundant manipulator was introduced in [15] to preserve the joint velocity/acceleration within their
limits. A similar, but, computationally more efficient approach called Saturation in the Null Space (SNS)
iterative algorithm was proposed in [16]. However, near the kinematic singularity posture, they could
not follow the desired trajectory with high accuracy.
Here, we propose a modified Improved Jacobian Pseudoinverse (mIJP) algorithm which mainly relied
on a differential kinematics to control the robot. Improved Jacobian Pseudoinverse (IJP) algorithm was
introduced to prevent sharp error when the initial posture of manipulator is close to kinematic singularity
in [17]. The basic concept of the IJP algorithm was calculating again the given trajectory in reverse
order. For reverse calculation, the IJP algorithm requires the calculated final position of manipulator's
end-effector to be converged to the desired position. However, with the decrease of redundancy by
considering the orientation of the end-effector, it becomes difficult to satisfy this requirement for the
singular posture. Therefore, we modify the IJP algorithm to control manipulator without such
requirement.
Also, we consider an efficient center of gravity (COG) trajectory planning method as it is the primary
concern for stable walking of a quadruped robot. In [18], two sway motions were introduced named Y-
Sway and E-Sway which have different methods to calculate the transversal components of the COG.
In [19], a sinusoidal sway both in moving direction and the transversal direction of the COG was
introduced. In [20], a composite COG trajectory planning method was introduced, which composed of
quintic curves and straight lines. Inverse kinematics using whole-body Jacobian with hybrid approach

4
was introduced in [21], and floating base approach was studied in [22, 23]. In [24], body movement
with the consideration of the body workspace was studied. A zero-moment point (ZMP) [25] based
stability criteria were also considered to maintain a dynamic stability [26, 27]. Even though these works
show great performance to sustain stability of a quadruped robot, they can only be applied when the
robot has global coordinate system or negligible leg weight comparing to the body weight.
Our proposed robot has kinematically redundant legs to exploit its redundancy to perform various
tasks, thus it has heavy weight comparing to the body weight (legs weight/robot weight ≈ 0.8). As a
result, when the robot swings its leg forward, corresponding COG movement is significant. However,
such COG movement is not desired because the COG movement may cross its stability boundary
formed inside the support polygon (SP). Thus, in this thesis, by adding the constraint of the foot contact
points in the combined Jacobian of the COG and centroid of the SP, we proposed a new COG trajectory
planning method for improved stable and efficient walking even though undesired COG movement was
occurred.
The remainder of this thesis is organized as follows. After discussing the system analysis and mIJP
algorithm in Section II and III, we propose the new COG trajectory planning method in Section IV.
Performance is verified by simulations and experiments in Section V. Conclusion and open issues are
summarized in Section VI.

5
II. System Analysis
II.1 System Configuration
As an actuator for a mobile robot, a cable-driven manipulator was studied in [28, 29]. Even though the
cable-driven manipulator can make continuous motion with light weight, its motion is uni-directional
motion which causes the increase of system complexity to make bi-directional motion. In [30, 31],
manipulators using soft actuator was studied. A soft robot arm can make infinite DOFs, thus the
traditional mathematical tools are difficult to apply. Also, it cannot generate high force to overcome the
weight of the robot. Even though the manipulator using a pneumatic actuator can generate relatively
high force, it is hard to precisely control and requires compressed fluid [32]. Therefore, we designed
direct-driven manipulator which consists of a series of short links connected to one another with the use
of discrete joints. The detailed description of the manipulator for each type are introduced in Table II.1.
Type Advantage Disadvantage Example
Cable-driven
manipulator
[28]
▣ Continuous motion
▣ Light body
▣ Unpredictable motion
▣ Uni-directional motion
Soft
manipulator
[30]
▣ Continuous motion
▣ Light body
▣ Unpredictable motion
▣ Generate low force
Pneumatic
manipulator
[32]
▣ Generate relatively
high force
▣ Light body
▣ Hard to control precisely
▣ Require compressed fluid
Direct-driven
manipulator
[33]
▣ Predictable motion
▣ Generate high force
▣ Discrete motion
▣ Heavy body
Table II.1 Types of manipulator
6
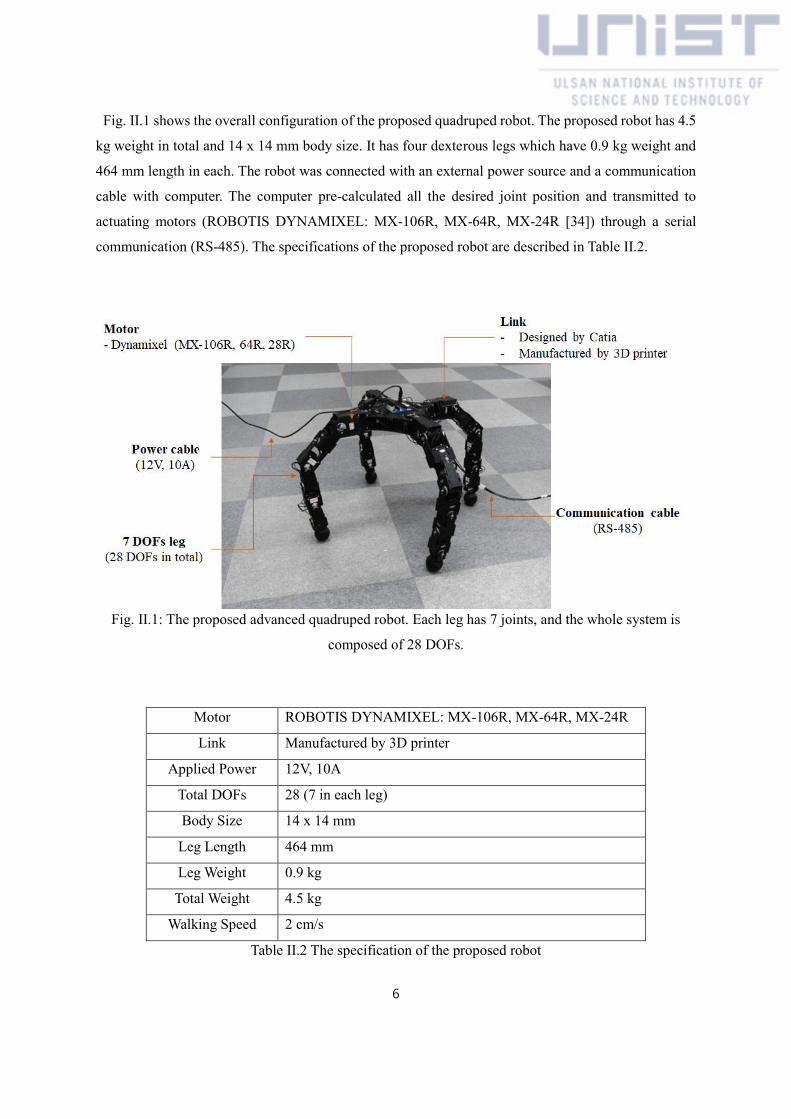
Fig. II.1 shows the overall configuration of the proposed quadruped robot. The proposed robot has 4.5
kg weight in total and 14 x 14 mm body size. It has four dexterous legs which have 0.9 kg weight and
464 mm length in each. The robot was connected with an external power source and a communication
cable with computer. The computer pre-calculated all the desired joint position and transmitted to
actuating motors (ROBOTIS DYNAMIXEL: MX-106R, MX-64R, MX-24R [34]) through a serial
communication (RS-485). The specifications of the proposed robot are described in Table II.2.
Fig. II.1: The proposed advanced quadruped robot. Each leg has 7 joints, and the whole system is
composed of 28 DOFs.
Motor ROBOTIS DYNAMIXEL: MX-106R, MX-64R, MX-24R
Link Manufactured by 3D printer
Applied Power 12V, 10A
Total DOFs 28 (7 in each leg)
Body Size 14 x 14 mm
Leg Length 464 mm
Leg Weight 0.9 kg
Total Weight 4.5 kg
Walking Speed 2 cm/s
Table II.2 The specification of the proposed robot

7
II.2 Kinematic Analysis of one leg
As previously mentioned, each leg of the proposed robot has 7 DOFs as shown in Fig. II.2. The
kinematic relation between the robot's body frame {B} and the end-effector frame {E} was found by
conventional forward kinematics methods such as Denavit-Hartenburg (DH) method. Note that the
geometrical configurations, and the attached reference frames of other legs are all identical. Because
each of the four identical legs has seven rotational actuators to set the position and orientation of the
end-effector, the proposed robot has kinematic redundancy of one that allows flexibility in
manipulations.
Fig. II.2: Attached reference frames on the robot ({B}: the robot’s body frame, {E}: end-effector
frame), z-axis of each joint frames coincides with the rotational axis.
Table II.3 is the DH table of the robot leg in Fig II.2. From the table, the transformation matrix for
each joint can be found by

8
B 1i 1ia id iq
1 b, x -axis -b, y -axis 145 , z -axis 1q
2 90 1L 0 2q
3 90 2L 0 3q
4 90 3L 0 4q
5 90 4L 0 5q
6 90 5L 0 906 q
7 90 6L 0 7q
E 0 7L 0 0
Table II.3: DH table of the single leg.
1
cosαd
sinαd
a
0
cosα
sinα
0
0
sinαcosq
cosαcosq
sinq
0
sinαsinq
cosαsinq
cosq
)q,zRot()d,zTran()a,xTran()α,xRot(T
1ii
1ii
1i
1i
1i
1ii
1ii
i
1ii
1ii
i
ii1i1ii1,-i
(II.1)
Using (II.1), the transformation matrix of the leg’s end-effector from the body frame can be calculated
by
1000
TTTTTTTTT
33
23
13
32
22
12
31
21
11
E7,6,75,64,53,42,31,20,1E0,
z
y
x
P
P
P
R
R
R
R
R
R
R
R
R
(II.2)
In (II.2), zyx P,P,P represent zyx ,, position parameters of the end-effector seen from the body
frame. To represent the orientation of the end-effector, ZYZ Euler angles notation which is one of sets
of Euler angles was used. The rotation described by ZYZ Euler angles is obtained as composition of the
following elementary rotations (Fig. II.3):

9
Fig. II.3: Representation of Euler angles ZYZ [35]
Rotate the reference frame by the angle about axis z .
Rotate the current frame by the angle about axis 'y .
Rotate the current frame by the angle about axis '''z .
In ZYZ Euler angles, the requested solution is, [35]
)(atan2
)(atan2
)atan2(
3132
33
2
23
2
13
1323
R,R
R,RR
R,R
(II.3)
Then, using (II.2) and (II.3), the position and orientation vector of the end-effector with respect to the
body frame can be found by:
)](atan2),(atan2),,(atan2,,,[
][
313233
2
23
2
131323 R,R,RRRRRPPP
zyx
zyx
T
p (II.4)
which is the function of joint values as:
)q,q,q,q,q,q,f(q 7654321p (II.5)
By conducting the time derivative of (II.5), kinematic relationship between velocity vector of end-
effector and joint velocity vector can be found by:

10
qJp
leg
7
6
5
4
3
2
1
7654321
7654321
7654321
7654321
7654321
7654321
q
q
q
q
q
q
q
θ
ψ
θ
ψ
θ
ψ
θ
ψ
θ
ψ
θ
ψ
θ
ψ
θ
θ
θ
θ
θ
θ
θ
θ
θ
θ
θ
θ
θ
θ
θθθθθθθ
θ
z
θ
z
θ
z
θ
z
θ
z
θ
z
θ
z
θ
y
θ
y
θ
y
θ
y
θ
y
θ
y
θ
y
θ
x
θ
x
θ
x
θ
x
θ
x
θ
x
θ
x
(II.6)
where 7x6legJ is the analytic Jacobian matrix of the leg,
7
7654321 ][ Tqqqqqqq q is
the joint velocity vector, 6p is the velocity vector of the end-effector with respect to the body
frame. When the manipulator is redundant, the Jacobian matrix has more columns than rows and infinite
solutions exist to solve the inverse kinematics from (II.6). A viable method to solve such inverse
kinematics problem is to formulate the problem as a constrained linear optimization problem [35].
In detail, the inverse kinematics problem from (II.6) is desired to find the solution q and minimize
the quadratic cost function of joint velocities
qWqq T
2
1)g( (II.7)
where W is a suitable (7 x 7) symmetric positive definite weighting matrix. This problem can be solved
by the method of Lagrange multipliers with the modified cost function
)(2
1),g( qJpλqWqλq
leg
TT (II.8)
where λ is an (6 x 1) vector of unknown multipliers. To minimize the modified cost function, the
requested solution has to satisfy the necessary conditions:
0q
T
g 0
λ
T
g (II.9)
From the first necessary condition, it is 0λJqW T
leg , thus
λJWqT
leg
1 (II.10)

11
where the inverse of W exists. Notice that the solution (II.10) is a minimum since Wq 22 / g is
positive definite. From the second necessary condition, the constraint
qJp leg (II.11)
is calculated. Combining two conditions in (II.10) and (II.11) gives
λJWJpT
legleg
1 (II.12)
Under the assumption that T
legleg JWJ 1 is invertible, solving for λ yields
pJWJλ 11 )( T
legleg (II.13)
which, substituted into (II.10), gives the sought optimal solution,
pJWJJWq 111 )( T
legleg
T
leg (II.14)
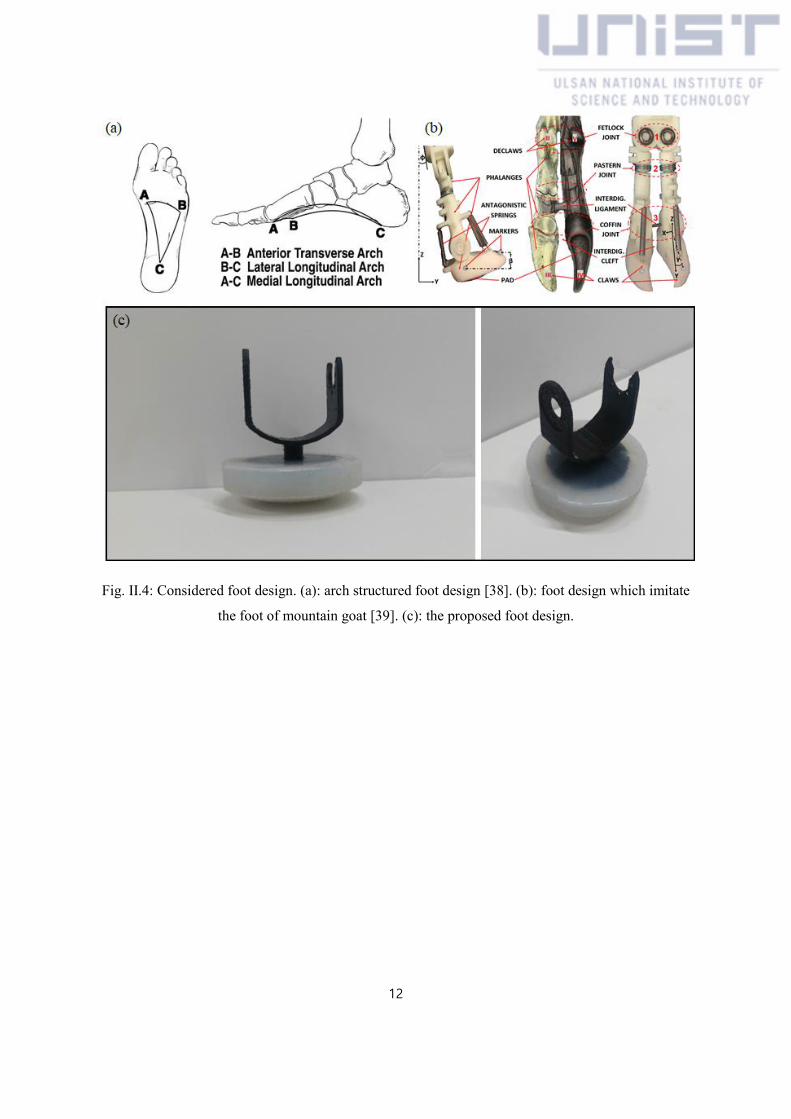
II.3 Foot Design
In the case of the foot shape, a sphere-shaped foot was suitable to adapt in a rough terrain, but it made
our robot easy to be tumbled. In [36, 37], the arch structure of human foot as in Fig. II.4-(a) was studied
for stability, and the foot morphology inspired by mountain goat as in Fig. II.4-(b) was studied in [39]
for slip reduction. However, manufactured foot design based on these works did not show huge
performance increment in mobile platform but increase the complexity of the design. Thus, by using
the silicon material named Smooth-on Dragon skin 30 [40], we made curved shape foot to adapt in
rough terrain by changing its own shape while sustaining stability as shown in Fig. II.4-(c)
12
Fig. II.4: Considered foot design. (a): arch structured foot design [38]. (b): foot design which imitate
the foot of mountain goat [39]. (c): the proposed foot design.

13
III. Modified Improved Jacobian Pseudoinverse (mIJP) Algorithm
III.1 Weighted Least Norm (WLN) Method
A differential kinematics is commonly used to control a manipulator since it relates joint space velocity
with a task space velocity through a Jacobain [35, 41]. For each leg, we compute the single-leg Jacobian,
76J , of the foot position with respect to the robot frame as in (II.14). A particular case occurs
when the weighting matrix W is the identity matrix I and the solution simplifies into
pJq (III.1)
where the matrix
1)( TTJJJJ (III.2)
is the Jacobian pseudo-inverse (JP) matrix of J . However, JP method does not consider the physical
limit of each joints of the manipulator. For joint limit avoidance, the joint velocity of a redundant
manipulator is calculated as follows, which is called the weighted least norm (WLN) method [10]:
0)(
if1
0)(
if)(
1
and,
000
000
000
where
)(][
7
2
1
111
i
ii
i
d
TT
q
qqw
w
w
w
qH
qHqH
W
KexJJWJWq
(III.3)
2
min,
2
max,
min,max,
2
min,max,
)()(4
)2()()(
iiii
iiiii
i qqqq
qqqqq
q
qH (III.4)
In (III.3), 7q is the joint position vector,
7q is the joint velocity vector, 6dx is a
desired velocity vector in the task space seen from the body frame, 66K is a positive definite
diagonal matrix, 6e is an error between the end-effector's desired position and the current

14
position, 77W is the weighting matrix and iw is the weighting factor of joint i . Also, to
exploit the redundancy of the leg,
iq
)(qH is defined as (III.4) so that the joints are forced to stay
within their limits, where iq is current position of joint i , and max,iq and
min,iq are its maximum
and minimum position, respectively. Fig. III.1 is the simulation results of the WLN method when the
manipulator was commanded to follow exactly same trajectory in Fig. III.1-(a) and (b). By comparing
two results, we could verify that the WLN method ensure the joint limit avoidance of the manipulator.
Fig. III.1: Joint values during trajectory following. (a). joint values without WLN method. (b). joint
values with WLN method.
III.2 Improved Jacobian Pseudoinverse (IJP) Algorithm
One can measure the distance from a singularity of a (redundant) manipulator at current posture using
a condition number (CN) of the Jacobian, )( J , as below [42].
)(
)()(
min
max
J
JJ
(III.5)
In (III.5), max and min are the maximum and minimum singular values of the Jacobian J ,

15
obtained from singular value decomposition respectively. Using a JP algorithm with WLN method of
(III.3) can generate a desired trajectory accurately as long as the condition number is small. However,
it shows a large error when the condition number is large. For example, Fig. III.2-(a) shows the
calculated trajectory of the robot’s leg using (III.3) when its condition number at initial posture is 6.03,
and the corresponding error is almost zeros as shown in Fig. III.2-(b). On the other hand, condition
number at the initial posture in Fig. III.2-(c) is 10156, and incurs a large error at the early stage of the
trajectory as shown in Fig. III.2-(d).
To reduce the sharp error peak, Improved Jacobian Pseudoinverse (IJP) algorithm was proposed in [17]
using 6 DOFs leg. The key idea is calculating again the given trajectory in reverse order after finishing
the calculation in forward direction. The detailed steps are described as follows:
STEP0: Check whether the CN of the leg at initial posture is bigger than a threshold 1 . If CN > 1 ,
go to the STEP1, whereas if CN < 1 , calculate joint position as usual using (III.3) and done.
STEP1: For a given desired trajectory dx and an initial joint position initq , calculate the last joint
position endq at the end of dx using (III.3).
STEP2: Obtain revd ,x by reversing dx , and calculate the series of joint positions in reverse order
revq from revd ,x start from endq using (III.3). Note that endq is now the initial joint position of
revd ,x .
STEP3: Reverse revq and obtain q , which is a series of joint positions to smoothly follow dx
with a reduced error at the early stage of dx .
STEP4: While calculating revq in STEP2, if CN at the beginning of revd ,x is higher than threshold
2 (equivalently, if the CN at the end of dx is higher than 2 ), then calculate again only the last
part of q start from a corresponding point in dx .
By using the IJP algorithm, we could minimize the error as shown in Fig. III.2-(f) when the leg was
commanded to follow the exactly same trajectory as in Fig. III.2-(c).

16
Fig. III.2: Simulation results of the inverse kinematics of the robot’s leg and the corresponding error
with different values of condition numbers. (a) and (b) : initial condition number is 6.03, and JP with
WLN is used, (c) and (d) : initial condition number is 10156, and JP with WLN is used, (e) and (f) :
initial condition number is 10156, and IJP with WLN is used.

17
III.3 Modified Improved Jacobian Pseudoinverse (mIJP) Algorithm
In the IJP algorithm, to calculate the trajectory in reverse order, the calculated final position of the
leg’s end-effector is required to be coincided with the desired position. However, by considering the
orientation of the end-effector, the redundancy of the leg decreased from three to one (from 6 DOFs
with position parameters to 7 DOFs with position and orientation parameters), which makes difficult to
satisfy this required condition when the CN of an initial posture is large. For example, Fig. III.3 shows
simulation results of the inverse kinematics of the robot's legs using (III.3) when the CN is 6129, which
is near the singularity. Fig. III.3-(a) and (c) are the results when the JP with WLN method was used.
Because the calculated result does not converge to desired position, it is impossible to calculate the
trajectory in reverse order which is the first step of the IJP algorithm.
Therefore, we modified the IJP algorithm to reduce errors without any requirement even when the CN
is large. The idea is to calculate the joint angles of the final position of the trajectory not from the current
position, but an arbitrary non-singular posture. From the arbitrary non-singular posture, a virtual
trajectory is generated to the final position. Since the virtual trajectory starts from the small CN, it
converges to the final position even with the reduced redundancy. After calculating the final joint angles,
we can calculate the given trajectory in reverse order as the remaining steps of the previous IJP
algorithm.
By using the mIJP algorithm, we could minimize the error without the required condition as shown
in Fig. III.3-(b) and (d) when the leg is commanded to follow the exactly same trajectory as in Fig. III.3-
(a). Note that all the joints are always within their physical limits during the simulations due to the WLN
method. The mIJP algorithm shows the great performance until the length of the trajectory is down to
1.5 mm. Since the length of the single leg is 464 mm, the mIJP algorithm can be said to be valid in the
whole workspace of the manipulator.

18
Fig. III.3: Simulation results of the inverse kinematics of the robot’s leg and the corresponding error
with the condition number of 6129. (a) and (c) : trajectory tracking using JP with WLN, (b) and (d)
trajectory tracking using mIJP with WLN.

19
IV. A COG Trajectory Planning Method
IV.1 Walking Mechanism
For the walking of a robot, there are two walking mechanisms, the first one is the static walking, and
the second one is the dynamic walking. In the static walking, for the stability, the projection of the COG
on the ground should be inside of foot support area as shown in Fig. IV.1.
Fig. IV.1: Static walking [43]
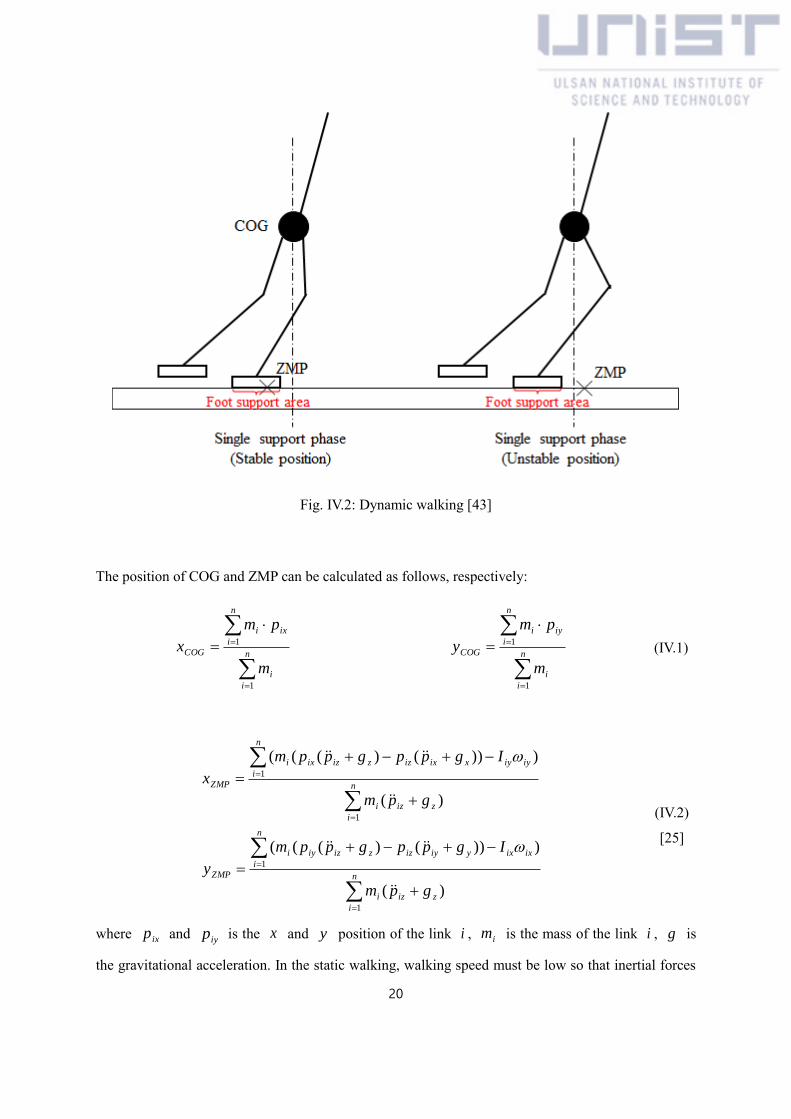
However, in the dynamic walking, the projection of the COG can be outside of the support area, but the
ZMP cannot, as shown in Fig. IV.2.
20
Fig. IV.2: Dynamic walking [43]
The position of COG and ZMP can be calculated as follows, respectively:
n
i
i
n
i
ixi
COG
m
pm
x
1
1
n
i
i
n
i
iyi
COG
m
pm
y
1
1 (IV.1)
n
i
zizi
n
i
ixixyiyizziziyi
ZMP
n
i
zizi
n
i
iyiyxixizzizixi
ZMP
gpm
Igppgppm
y
gpm
Igppgppm
x
1
1
1
1
)(
)))()(((
)(
)))()(((
(IV.2)
[25]
where ixp and iyp is the x and y position of the link i , im is the mass of the link i , g is
the gravitational acceleration. In the static walking, walking speed must be low so that inertial forces
21
are negligible. On the other hands, the dynamic walking can have fewer legs than static machines, and
are potentially faster. Even though the dynamic walking can generate more natural motion of the robot
than the static walking, it requires precise knowledge of robot dynamics which complicated. Many
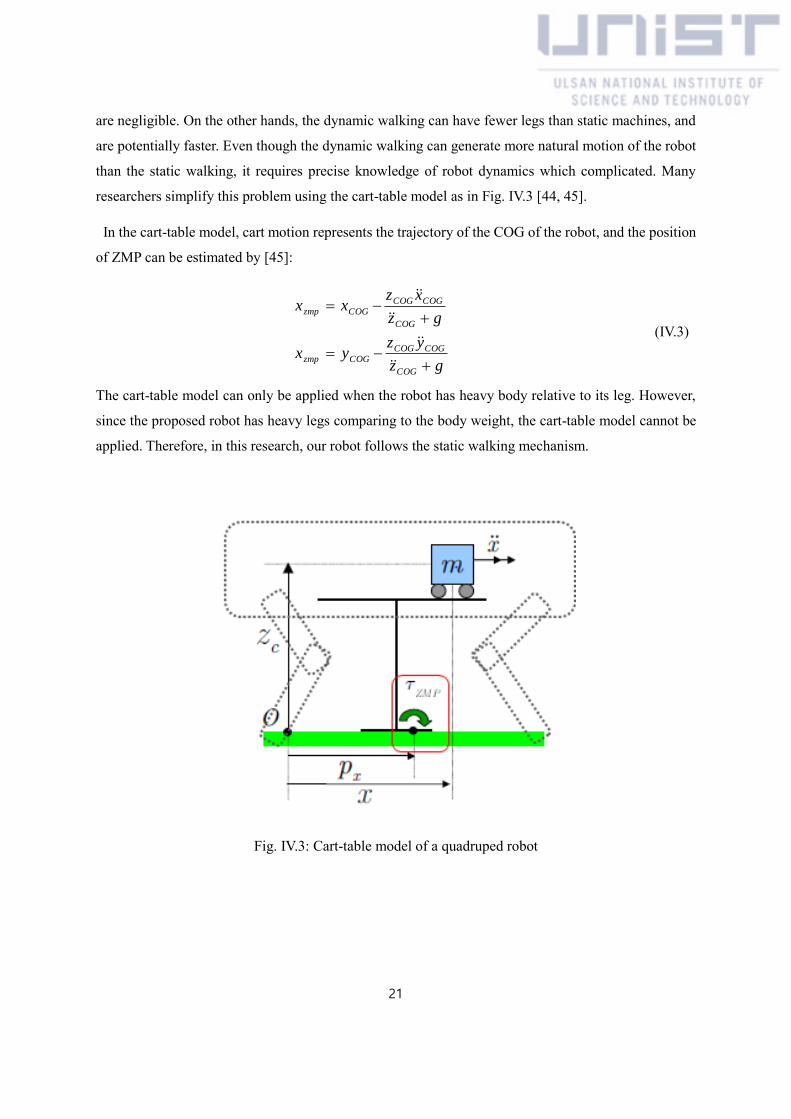
researchers simplify this problem using the cart-table model as in Fig. IV.3 [44, 45].
In the cart-table model, cart motion represents the trajectory of the COG of the robot, and the position
of ZMP can be estimated by [45]:
gz
yzyx
gz
xzxx
COG
COGCOG
COGzmp
COG
COGCOG
COGzmp
(IV.3)
The cart-table model can only be applied when the robot has heavy body relative to its leg. However,
since the proposed robot has heavy legs comparing to the body weight, the cart-table model cannot be
applied. Therefore, in this research, our robot follows the static walking mechanism.
Fig. IV.3: Cart-table model of a quadruped robot

22
IV.2 Stability Criteria
For the static walking, the way to address stability is to examine the SP which is the minimum area
convex point set in the support plane such that all the leg contact points are contained. As long as the
projection of the COG lies in the SP, the robot is statically stable [46] as in Fig. IV.4.
In order to get a robust plan, numbers of stability criteria have been defined, such as, stability margin
(SM) [46], longitudinal stability margin (LSM) [48], energy stability margin (ESM) [49], normalized
energy stability margin (NESM) [50]. Among these criteria, LSM is commonly used because it is
intuitive and easy to calculate. Therefore, we decided to follow LSM criterion as in Fig. IV.5. When the
LSM is greater than zero, then the robot is in a statically stable posture.
Fig. IV.4: Stance posture of the proposed robot. (a): Unstable posture, (b): Stable posture

23
Fig. IV.5: Definitions of longitudinal stability margin: LSM = min(Srm, Sfm)
IV.3 Gait Sequence
To form a SP for a quadruped static walking, only one leg can swing at a time. In this condition, there
are total six possible leg sequences as in Fig. IV.6, but only one sequence satisfies the requirement that
makes the COG to move forward at all times [46, 47]. This sequence is [Right-Hind (RH), Right-
Forward (RF), Left-Hind (LH), Left-Forward (LF)] or [LH, LF, RH, RF] which is gait sequence in Fig.
IV.6-(b). Therefore, we chose this pattern for static walk operation.
Fig. IV.6: A quadruped robot static walking gait sequences start with leg 1
24
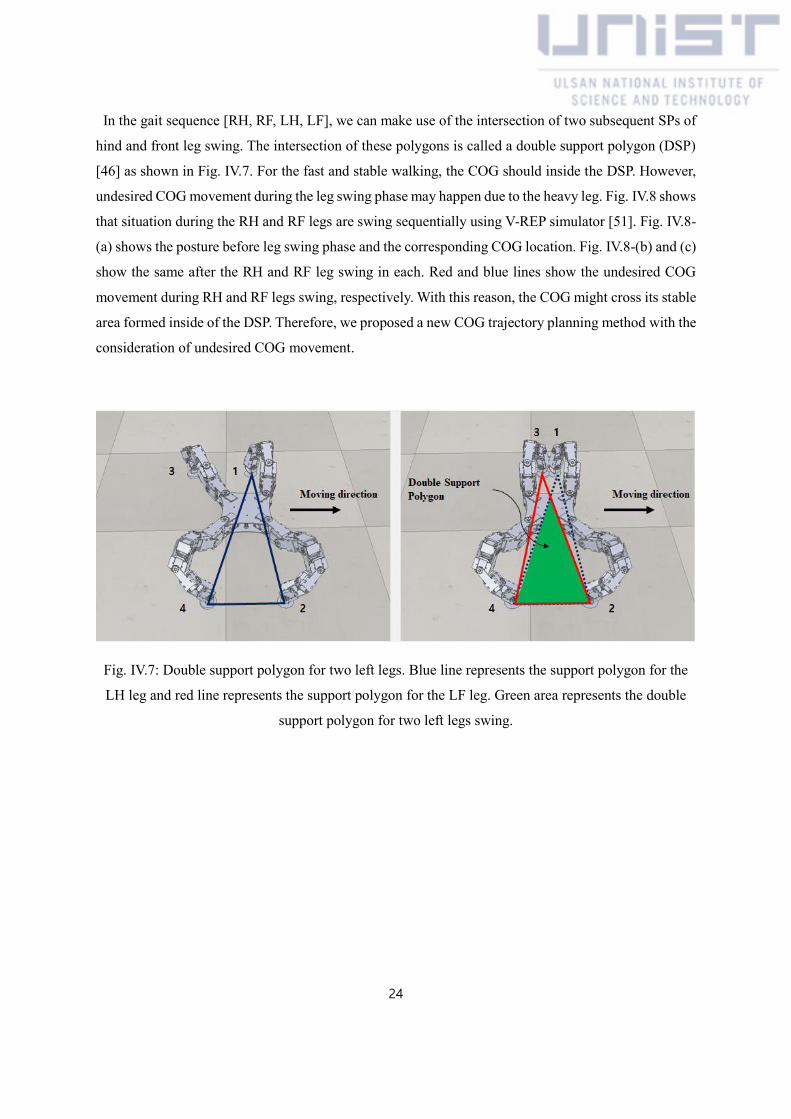
In the gait sequence [RH, RF, LH, LF], we can make use of the intersection of two subsequent SPs of
hind and front leg swing. The intersection of these polygons is called a double support polygon (DSP)
[46] as shown in Fig. IV.7. For the fast and stable walking, the COG should inside the DSP. However,
undesired COG movement during the leg swing phase may happen due to the heavy leg. Fig. IV.8 shows
that situation during the RH and RF legs are swing sequentially using V-REP simulator [51]. Fig. IV.8-
(a) shows the posture before leg swing phase and the corresponding COG location. Fig. IV.8-(b) and (c)
show the same after the RH and RF leg swing in each. Red and blue lines show the undesired COG
movement during RH and RF legs swing, respectively. With this reason, the COG might cross its stable
area formed inside of the DSP. Therefore, we proposed a new COG trajectory planning method with the
consideration of undesired COG movement.
Fig. IV.7: Double support polygon for two left legs. Blue line represents the support polygon for the
LH leg and red line represents the support polygon for the LF leg. Green area represents the double
support polygon for two left legs swing.

25
Fig. IV.8: The undesired COG movement during the RH and RF legs are swing sequentially: (a)
before leg swing phase. (b) after RH leg swing. (c) after RF leg swing. Red and blue lines represent
the COG movement during first and second leg swing, respectively.
IV.4 A COG Trajectory Planning Method
For the COG shift, calculation from the global frame was needed because the body frame moved as
the body moved. However, to use the global frame, the additional devices such as camera are needed to
detect the position of the robot from the global frame. One way to conduct the calculation in the body
frame is to give the same trajectory to all legs with contacting the ground. Then the corresponding body
trajectory will be the reverse of the leg’s trajectory as shown in Fig. IV. 9-(a). However, since the weight
of the proposed robot does not concentrate on the body, the body movement does not fully mean the
COG movement. For example, even though we shift the body by amount of the blue arrow, the
corresponding COG movement will not be the same with the blue arrow like green arrow in Fig. IV.9-
(a). To solve this problem, with the short length shifting of the body, the COG position is checked and
recalculate the direction to move toward the desired position. By repeating this step, if the COG
coincides with the desired point, the COG shift is stopped as shown in Fig. IV.9-(b). However, it requires

26
large computational costs.
Therefore, to conduct the calculation in the body frame with low computational costs, we used
combined Jacobian of the COG and centroid [17] which relates the velocity difference between the
COG and the centroid seen from the body frame with the joint velocity as in Fig. IV.10 and follows:
centS PPP COG (IV.4)
AllSS qJP (IV.5)
Fig. IV. 9: The COG shift methods. (a): Give the same trajectory to all legs with contacting the
ground. (b): with the short length shifting, get the feedback of the direction of the body shift.
Fig. IV.10: The proposed position difference vector between the COG and centroid
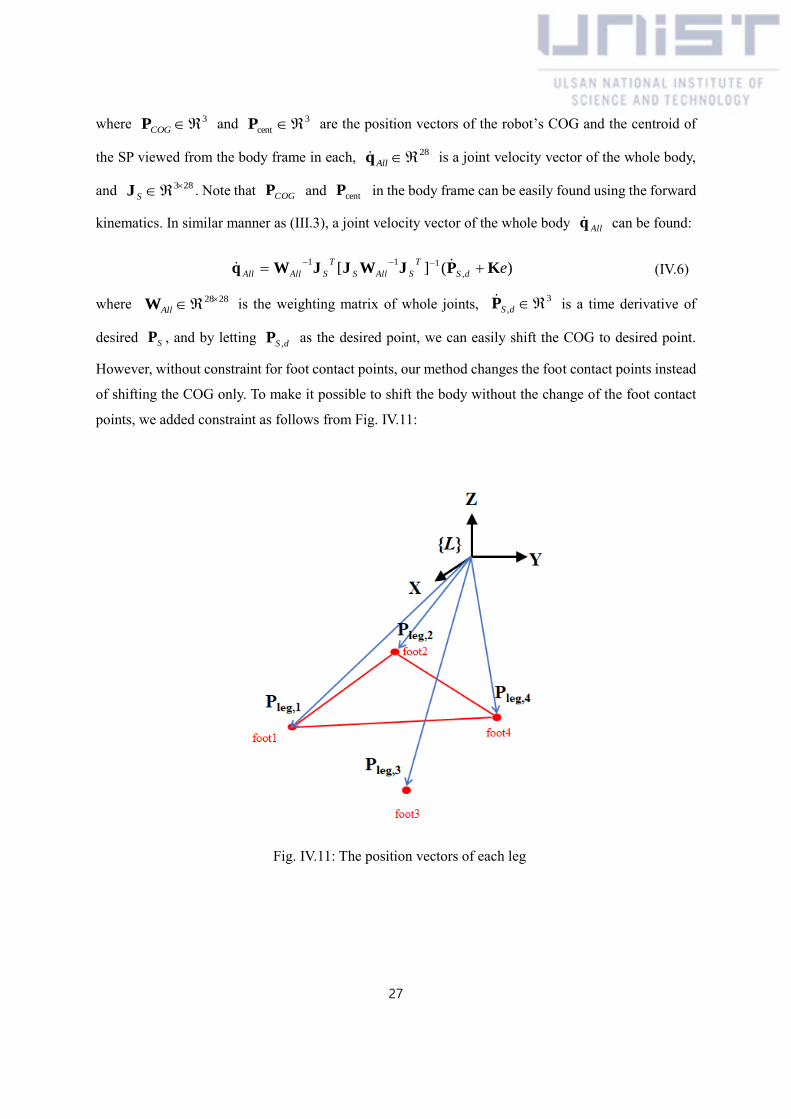
27
where 3COGP and
3
cent P are the position vectors of the robot’s COG and the centroid of
the SP viewed from the body frame in each, 28Allq is a joint velocity vector of the whole body,
and 283SJ . Note that COGP and centP in the body frame can be easily found using the forward
kinematics. In similar manner as (III.3), a joint velocity vector of the whole body Allq can be found:
)(][ ,
111edS
T
SAllS
T
SAllAll KPJWJJWq (IV.6)
where 2828AllW is the weighting matrix of whole joints,
3
, dSP is a time derivative of
desired SP , and by letting dS ,P as the desired point, we can easily shift the COG to desired point.
However, without constraint for foot contact points, our method changes the foot contact points instead
of shifting the COG only. To make it possible to shift the body without the change of the foot contact
points, we added constraint as follows from Fig. IV.11:
Fig. IV.11: The position vectors of each leg

28
constantjleg,ileg, PP (IV.7)
0jleg,ileg, PP (IV.8)
where 3
ileg, P and 3
jleg, P are the position vectors of end-effector of leg i and j viewed
from the body frame, 3
ileg, P and 3
jleg, P are time derivative of ileg,P and
jleg,P . In joint
space expression, (IV.8) can be expressed as:
0
q
q
q
q
JJ
JJ
JJ
4,
3,
2,
1,
4,3,
3,2,
2,1,
00
00
00
leg
leg
leg
leg
legleg
legleg
legleg
(IV.9)
where 7
ileg, q is joint values of leg i , 73
ileg,
J is the Jacobian matrix of the leg i . At this
point, rearrange the 28 joints into the actuated and passive joints. Then, (IV.9) can be rearranged as:
0q
qHH
p
a
pa
(IV.10)
where aq and pq are joint velocities of actuated and passive joints, aΗ and
pΗ are collection
of columns of the actuated and passive joints, respectively. To make use of redundancy in both actuated
and passive joints, the number of actuated joints should be greater than 3 which is the dimension of the
velocity vector, and the number of passive joints should be greater than the number of actuated joints.
Therefore, the possible numbers of actuated joints for each leg are 1,2,3. With the assumption that three
joints are actuated joint for each leg, the relationship between the actuated and passive joints can be
expressed as:
aapp qHHq (IV.11)
where 12aq and
16pq , 129aH and
169pH . 916
pH is a pseudo-
inverse of pH . With this constraint, (IV.5) is rearranged to:
aCa
ap
SAllSS qJqHH
IJqJP
12 (IV.12)
where 28][ T
paAll qqq , and 123CJ . To exploit the redundancy for joint limit avoidance,
the velocity vector of actuated joints can be derived as:

29
dS
T
CaC
T
Caa ,
111][ PJWJJWq
(IV.13)
where 1212aW is the weighting matrix of the actuated joint from AllW in (IV.6). In similar
manner, velocity vector of the passive joint in (IV.11) is rearranged to:
aa
T
ppp
T
ppp qHHWHHWq 111][
(IV.14)
where 1616pW is the weighting matrix of the passive joint from AllW in (IV.6).
Fig. IV.12 shows the simulation results when the robot was commanded to coincide its COG with the
figure-8 trajectory. The COG trajectory and the corresponding foot contact points were shown without
constraint in Fig. IV.12-(a) and with constraint in Fig. IV.12-(b). It shows better performance for
tracking the desired trajectory and maintaining the foot contact point when the constraint in (IV.7) and
(IV.8) was applied. Even though errors still exist due to the foot slippage, but they are not significant
enough to influence the stability of the robot.

30
Fig. IV.12: The robot was commanded to coincide its COG to the figure-8 trajectory in simulation.
The position of the COG and supporting feet are marked. (a) and (c): without the constraint for foot
contact point, (b) and (d): with the constraint for foot contact point.
By using (IV.13) and (IV.14), the proposed COG trajectory planning method shifts the COG to the
point where the COG is always inside the DSP even with the undesired COG movement during the leg
swing phase. Also, by removing unnecessary shift motion of the body, our method enables efficient
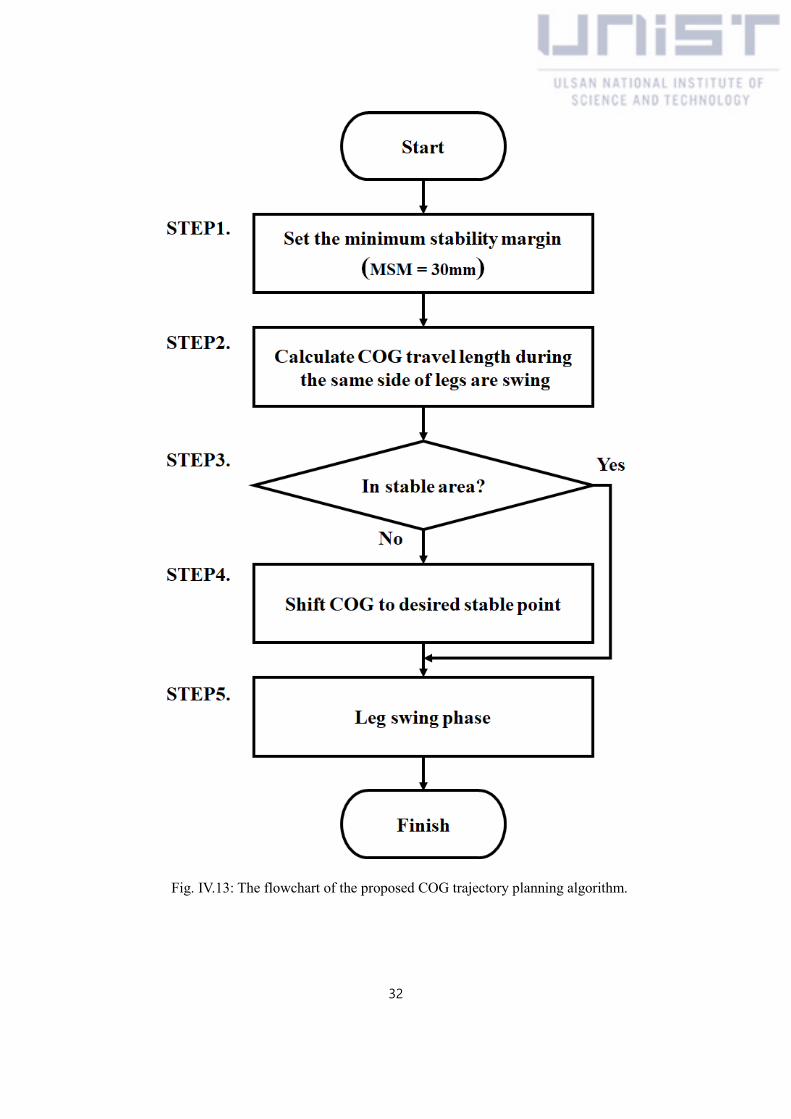
walking of the robot. The detailed steps are described as follows (Fig. IV.13):
STEP1: In order to ensure stability of the actual robot, a minimum stability margin (MSM) is
necessary. The robot is stable only when LSM is greater than MSM. For our platform, we set MSM as
30mm by considering the robot size.

31
STEP2: Kinematically calculate the COG travel distance (CTD) from Fig. IV.8-(a) to Fig. IV.8-(c)
without actual movement.
STEP3: Check if the COG is in the stable area or not. If the whole COG trajectory is in stable area
during the leg swing phase, move to STEP5. If not, move to STEP4.
STEP4: With the calculated CTD, the goal of this step is to shift the COG to the stable area with the
consideration of the undesired COG movement. For example, Fig. IV.14 shows the COG shift plan
before two right-side legs swing. At the initial posture in Fig. IV.14-(a), the robot is unstable as shown
in Fig. IV.14-(b). If we shift the COG from Fig. IV.14-(b) to (c), the robot is stable, but it is inefficient
because of the excessive transversal movement. Therefore, our goal is to shift the COG from Fig. IV.14-
(b) to (d) for stable and efficient walking.
STEP5: Move the leg to the swing phase.
32
Fig. IV.13: The flowchart of the proposed COG trajectory planning algorithm.

33
Fig. IV.14: COG shift plan before two right-side legs swing. The red line is SP before RH leg swing
and the blue line is SP before RF swing. The green line is stable area where LSM is ensured to be
greater than MSM inside DSP. (a) Initial posture before leg swing when the robot tends to move left
direction. (b) COG location of initial posture. The robot is unstable. (c) Stable but inefficient COG
location because unnecessary shift motion exists. (d) Stable and efficient COG location.

34
V. Performance verification by Simulations and Experiments
V.1 Simulation Results
To verify the performance of the proposed robot and the algorithms, the V-REP simulator was used in
this work. First, we simulated the robot to walk forward with the proposed algorithm as shown in Fig.
V. 1. With the gait sequence [RH, RF, LH, LF], from initial posture in take 1, shifted the COG in take2,
swung RH and RF legs in take3-4, shifted the body forward in take5, shifted COG in take6, LH and LF
legs swung in take7-8, shifted the body forward in take9. The mIJP algorithm was applied every time
when the robot tried to swing its leg. At the same time, the robot coincided its COG to the point where
stable and efficient walking was guaranteed as shown in Fig. IV.14-(d) using (IV.13) and (IV.14). Fig.V.2
shows COG movement during two right side legs swing phase and the corresponding SPs. The red line
is the SP before RH leg swing, and the blue line is the SP before RF leg swing (after RH leg swing). By
putting the CTD to the stable area, stable and efficient walk was ensured.
Also, the robot could change its height up to 180% from initial posture by giving the same trajectory
to all legs toward vertical axis as shown in Fig. V.3. Even though there was an obstacle in the moving
direction, the robot could easily overcome by changing its height. The walking algorithm was the same
with the previous one in Fig. V.1.
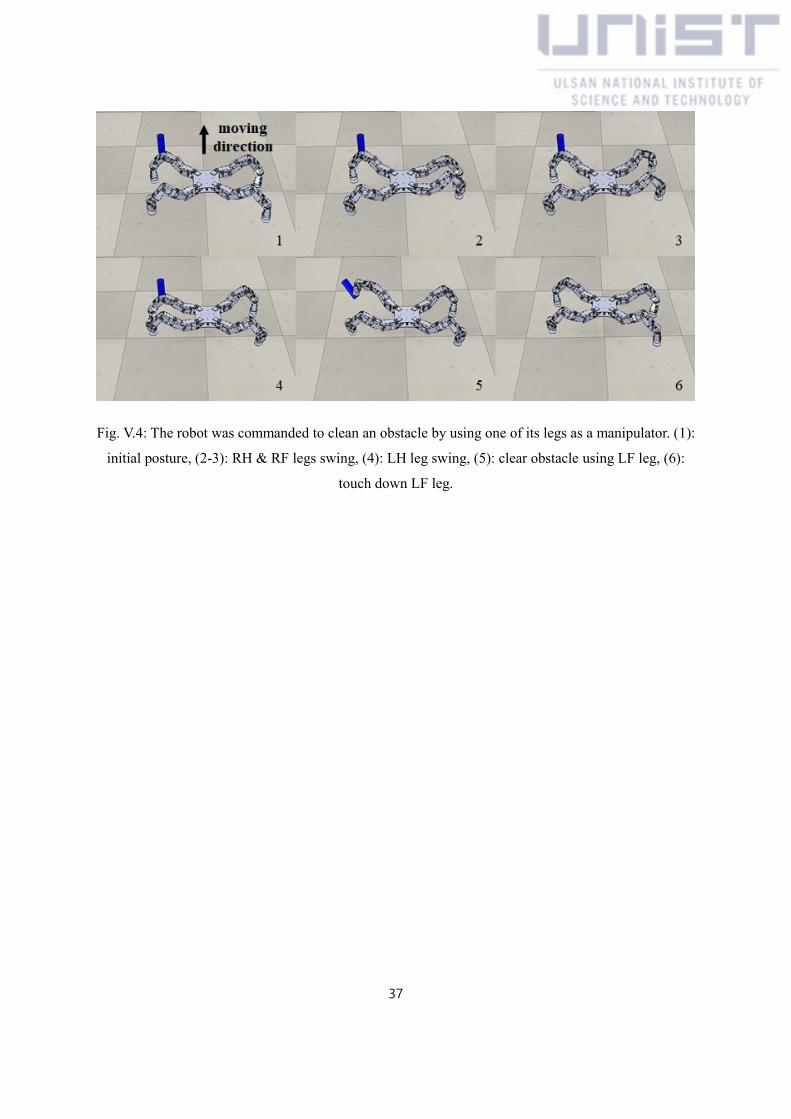
In Fig. V.4, we simulated the robot to clean an obstacle by considering the situation that the robot uses
its leg as a manipulator. Before raising the leg, we commanded the robot to move its COG inside the SP
formed by the remaining three feet using (IV.13) and (IV.14).
Not only traveling on the flat terrain, but also the robot could pass through narrow gap down to 40 cm
(initial width = 70 cm) with different posture as shown in Fig. V.5. Instead of common walking, the
robot passed through narrow gap with crawl gait like caterpillar. From the initial posture in take1, the
robot lifted and shifted the body forward in take2. In take3-4 the robot lifted and shifted the legs forward.
In this gait, body contacted the ground except take2. Therefore, we did not have to consider the stability
of the robot.

35
Fig. V. 1: Snapshots of the robot during the simulation. (1): initial posture, (2): COG shift, (3-4): RH
& RF legs swing, (5-6): COG shift, (7-8): LH & LF legs swing, (9): back to initial posture.

36
Fig. V. 2: Simulation results when the robot was commanded to walk on the plain terrain. The red line
is the SP before first leg (RH) swing and the blue line is the SP before second leg (RF) swing. The red
circle represents undesired COG movement during first leg swing, and the blue circle represent that of
second leg swing. The green line is the stable area where LSM is guaranteed to be greater than MSM
inside DSP.
Fig. V.3: The robot could change its height up to 180% from initial posture to avoid the obstacle in the
moving direction. (1): initial posture, (2): change height, (3-4): RH & RF legs swing, (5-6): LH & LF
legs swing.
37
Fig. V.4: The robot was commanded to clean an obstacle by using one of its legs as a manipulator. (1):
initial posture, (2-3): RH & RF legs swing, (4): LH leg swing, (5): clear obstacle using LF leg, (6):
touch down LF leg.

38
Fig. V.5: The robot could overcome narrow gap by changing its posture. (1): initial posture, (2): lift
and shift the body forward, (3-4): lift and shift the legs forward.
V.2 Experimental Results
In the experiment, the robot was in the same situation with the simulation in section V.1. First, the
robot was commanded to walk forward as in Fig. V.1 with the proposed algorithm. In Fig.V.6, after the
robot shift the COG to ensure stable and efficient walking, swung the RH and RF legs from the take1-
4. The same procedures were repeated for left legs in take5-8. The robot could traverse 13 cm forward
in a single cycle of walking, and the walking speed is about 2 cm/s, A statically stable gait was achieved
using the proposed algorithm.
The height change during walking was also verified in the experiment. In Fig. V.7, the obstacle with
12.5 cm height (robot height = 8.5 cm) was set at the front of the robot. Instead of circumventing the

39
obstacle, the robot could easily overcome by changing its height. After changing its height in take1-2,
take3-6 show the same walking algorithm of Fig. V.3.
Also, the robot was tested to clean an obstacle as shown in Fig. V.8. The robot located its COG inside
the SP formed by the remaining three feet using (IV.13) and (IV.14). This test showed that the robot can
do a simple task by using its leg as a manipulator.
Lastly, the robot passed through narrow gap by changing its posture. In Fig. V.9, narrow gap was set
to 45 cm. The robot lifts and shifts the body forward in take1-2, lift and shift the legs forward in take3-
4.
Fig. V.6: The robot took a step forward as in Fig. V.1. (1): initial posture, (2): COG shift, (3-4): RH \&
RF legs swing, (5-6): COG shift, (7-8): LH \& LF legs swing, (9): back to initial posture

40
Fig. V.7: The robot changed its height as in Fig. V.3. (1): initial posture, (2): change height, (3-4): RH
& RF legs swing, (5-6): LH & LF legs swing.
Fig. V.8: The robot cleared the obstacle as in Fig. V.4. (1): initial posture, (2-3): RH & RF legs swing,
(4): LH leg swing, (5): Clear obstacle using LF leg, (6): touch down LF leg.

41
Fig. V.9: The robot passed through narrow gap as in Fig. V.5. (1): initial posture, (2): lift and shift the
body forward, (3-4): lift and shift the legs forward.

42
VI. Conclusion and Open Issues
In this thesis, a redundant quadruped robot that has 28 degree-of-freedoms (DOFs) (7 DOFs in one
leg) was proposed for various types of locomotion and manipulation. Inverse kinematics of each leg,
which has 7 joints, was handled by the modified improved Jacobian pseudoinverse (mIJP) algorithm
together with the weighted least norm (WLN) method which forces all joints in their physical limits.
Previously, the improved Jacobian pseudoinverse (IJP) algorithm was proposed to generate accurate
trajectory following even when the initial posture of the leg is close to the singularity. The IJP algorithm
requires the calculated final position of the leg to be coincided with the desired position. However, with
the decrease of redundancy, it became difficult to satisfy this required condition. Therefore, the mIJP
algorithm was proposed to accurately follow trajectory even with the decreased number of redundancy.
This mIJP algorithm with the WLN method was used to follow a desired trajectory of the leg in this
thesis.
In addition, to maintain a statically stable posture when the robot walks, a combined Jacobian of center
of gravity (COG) and a centroid of the support polygon (SP) with the constraints for the foot contact
points was proposed. This method helped the robot to shift the COG to desired position with reduced
errors and made it possible to all calculations are conducted in the body frame. With this method, a
COG trajectory planning method for stable and efficient walk was proposed. In the case of the
quadruped robot which has heavy legs, undesired COG movement occurs during leg swing phase. By
shifting the undesired COG movement to the stable area, stable and efficient walking could be achieved.
The proposed methods were verified in simple walking, changing height, clearing obstacle, and passing
through narrow gap. All these scenarios were verified by simulations and experiments.
However, to detect obstacle and travel rough terrain, sensory feedbacks (e.g., Inertia Measurement
Unit, force sensor, camera sensor) are needed. Hence, adding some sensors in the robot to boost the
performance in more complex environment is needed. Also, dynamics of the robot should be considered.
Even though the proposed robot shows versatile mobility in various environments, walking ability on
the plain terrain was below expectation. By considering the dynamics of the robot, movement speed
should be increased. Additionally, computations and controls of the robot should be handled by an on-
board processor to reduce the communication delay between the robot and computer.

43
REFERENCE
[1] M. Cianchetti, M. Calisti, L. Margheri, M. Kuba, and C. Laschi, “Bioinspired locomotion and
grasping in water: the soft eight-arm OCTOPUS robot,” Bioinspiration & Biomimetics, vol. 10, no. 3,
2015.
[2] M. Sfakiotakis, A. Kazakidi, A. Chatzidaki, T. evdaimon, and D. P. Tsakiris, “Multi-arm Robotic
Swimming with Octopus-inspired Compliant Web,” IEEE International Conference on Intelligent
Robots and Systems (IROS), 2014, pp. 302-308
[3] A. Shkolnik and R. Tedrake, “Inverse kinematics for a point-foot quadruped robot with dynamic
redundancy resolution,” in IEEE International Conference on Robotics and Automation, 2007, pp.
4331– 4336.
[4] D. Pongas, M. Mistry, and S. Schaal, “A robust quadruped walking gait for traversing rough terrain,”
in IEEE International Conference on Robotics and Automation, 2007, pp. 1474–1479.
[5] B. del Rosario, C. S. Falcon, J. P. Pasion, and F. Tamonte, “Implementation of Balance Control on
Terrain Quadruped Traversal” in IEEE International Conference Humanoid, Nanotechnology,
Information Technology, Communication and Control, Environment and Management, 2015, pp. 1-5.
[6] S. Kitano, S. Hirose, A. Horigome, and G. Endo, “TITAN-XIII: sprawling-type quadruped robot
with ability of fast and energy-efficient walking,” ROBOMECH Journal, vol. 3, no. 1, pp. 8-23, 2016.
[7] K. Byl, M. Byl, and B. Satzinger, “Algorithmic optimization of inverse kinematics tables for high
degree-of-freedom limbs,” in Proc. ASME Dynamic Systems and Control Conference (DSCC), 2014.
[8] B. W. Satzinger, J. I. Reid, M. Bajracharya, P, Hebert, and K. Byl, “More Solution Means More
Problems: Resolving Kinematic Redundancy in Robot Locomotion on Complex Terrain,” in IEEE
Intelligent Robots and Systems (IROS), 2014, pp. 4861-4867.
[9] S. Chiaverini, G. Oriolo, and I. D. Walker, Kinematically redundant manipulators. Springer
Handbook of Robotics (ed. Bruno Siciliano and Oussama Khatib). Springer, 2008.
[10] T. F. Chan and R. V. Dubey, “A weighted least-norm solution based scheme for avoiding joint
limits for redundant joint manipulators,” IEEE Transactions on Robotics and Automation, vol. 11, no.
2, pp. 286–292, 1995.

44
[11] L. Sciavicco and B. Siciliano, “A solution algorithm to the inverse kinematic problem for redundant
manipulators,” IEEE Journal on Robotics and Automation, vol. 4, no. 4, pp. 403–410, 1988.
[12] S. B. Slotine, “A general framework for managing multiple tasks in highly redundant robotic
systems,” in International Conference on Advanced Robotics, vol. 2, 1991, pp. 1211–1216.
[13] A. Colomn and C. Torras, “Closed-loop inverse kinematics for redundant robots: Comparative
assessment and two enhancements.” IEEE/ASME Transactions on Mechatronics, vol. 20, pp. 944-955,
2015
[14] A. A. Goldenberg, B. Benhabib, and R. G. Fenton, “A complete generalized solution to the inverse
kinematics of robots,” IEEE Journal of Robotics and Automation, vol. RA-1, pp. 14-20, 1985.
[15] D. Omrcen, L. Zlajpah, and B. Nemec, “Compensation of velocity and/or acceleration joint
saturation applied to redundant manipulator,” Robotics and Autonomous Systems, vol. 55, pp. 337–344,
2007.
[16] F. Flacco, A. D. Luca, and O. Khatib, “Motion control of redundant robots under joint constraints:
Saturation in the null space,” in IEEE International Conference on Robotics and Automation, 2012, pp.
285–292.
[17] B. Kwak, H. Park, and J. Bae, “Development of a quadruped robot with redundant dofs for high-
degree of functionality and adaptation,” in IEEE International Conference on Advanced Intelligent
Mechatronics (AIM), 2016, pp. 608–613.
[18] F.-T. Cheng, H.-L. Lee, and D. E. Orin, “Increasing the locomotive stability margin of multilegged
vehicles,” in IEEE International Conference on Robotics and Automation, vol. 3, 1999, pp. 1708–1714.
[19] D. Pongas, M. Mistry, and S. Schaal, “A robust quadruped walking gait for traversing rough terrain,”
in IEEE International Conference on Robotics and Automation, 2007, pp. 1474–1479.
[20] S. Zhang, X. Rong, Y. Li, and A. B. Li, “A composite cog trajectory planning method for the
quadruped robot walking on rough terrain,” International Journal of Control and Automation, vol. 8,
no. 9, pp. 101–118, 2015.
[21] A. Shkolnik and R. Tedrake, “Inverse Kinematics for a Point-Foot Quadruped Robot with Dynamic
Redundancy Resolution,” IEEE International Conference on Robotics and Automation, 2007, pp. 4331-
4336

45
[22] M. Mistry, J. Nakanishi, G. Cheng, and S. Schaal, “Inverse Kinematics with Floating Base and
Constraints for Full Body Humanoid Robot Control,” IEEE/RAS International Conference on
Humanoid Robots, 2008, pp. 22-27
[23] M. Mistry, J. Nakanishi, and S. Schaal, “Task Space Control with Prioritization for Balance and
Locomotion,” IEEE/RSJ International Conference on Intelligent Robots and Systems, 2007, pp.331-
338
[24] V. Loc, I. Koo, D. T. Tran, S. Park, H. Moon, and H. Choi, “Body Workspace of Quadruped
Walking Robot and its Applicability in Legged Locomotion,” Journal of Intelligent and Robotic
Systems, 2012, vol 67, pp. 271-284
[25] M. Vukobratovic and B. Borovac, “Zero-moment point: Thirty five years of its life,” Internatioanl
Journal of Humanoid Robotics, vol. 1, pp. 157–173, 2004.
[26] K. Byl and M. Byl, “Design of fast walking with one- versus twoat-a-time swing leg motions for
robosimian,” in IEEE International Conference on Technologies for Practical Robot Applications, 2015,
pp. 1–7.
[27] M. Kalakrishnan, J. Buchli, P. Pastor, M. Mistry, and S. Schaal, “Fast, robust quadruped
locomotion over challenging terrain,” in IEEE International Conference on Robotics and Automation,
2010, pp. 2665–2670.
[28] G. Z. Lum, S. K. Mustafa, H. R. Lim, W. B. Lim, G. Yang, and S. H. Yeo, “Design and Motion
Control of a Cable-driven Dexterous Robotic Arm,” IEEE Conference on Sustainable Utilization and
Development in Engineering and Technology, 2010, pp. 106-111.
[29] G. Yang, S. K. Mustafa, S. H. Yeo, W. Lin, and W. B. Lim, “Kinematic design of an
anthropomimetic 7-DOF cable-driven robotic arm,” Frontiers of Mechanical Engineering, vol. 6, pp.
45-60, 2011.
[30] F. Renda, M. Giorelli, M. Calisti, M. Cianchetti, and C. Laschi, “Dynamic Model of a
Multibending Soft Robot arm Driven by Cables,” IEEE Transaction on Robotics, 2014, pp. 1109-
1122
[31] J. Tian and Q. Lu, “Simulation of Octopus Arm Based on Coupled CPGs,” Journal of Robotics,
vol. 4, 2015.

46
[32] M. V. Damme, F. Daerden, and D. Lefeber, “A Pneumatic Manipulator used in Direct Contact
with an Operator,” IEEE International Conferenct on Robotics and Automation, 2005, pp. 4494-
4499.
[33] KINOVA. (2017) JACO 7DOF-S. [Online]. Available: http://www.kinovarobotics.com/
[34] ROBOTIS. (2017) Dynamixel. [Online]. Available: http://www.robotis.com/
[35] B. Siciliano, L. Sciavicco, L. Villani, and G. Oriolo, Robotics: Modeling, Planning and Control.
Springer, 2009.
[36] R. F. Ker, M. B. Bennett, S. R. Bibby, R. C. Kester, and R. M. Alexander, “The spring in the arch
of the human foot,” Nature, vol. 325, pp. 147-149, 1987.
[37] E. Anzai, K. Nakajima, Y. Iwakami, M. Sato, S. Ino, T. Ifukube, K. Yamashita, and Y. Ohta,
“Effects of Foot Arch Structure on Postural Stability,” Clinical Research on Foot and Ankle, vol. 2,
2014
[38] H. Gray, Anatomy of the Human Body. C. M. Goss, Ed. Philadelphia, PA: Lea and Febiger, 1949
[39] S. A. Abad, N. Sornkarn, and T. Nanayakkara, “The Role of Morphological Computation of the
Goat Hoof in Slip Reduction,” IEEE International Conference on Intelligent Robots and Systems, 2016,
pp. 5599-5605.
[40] SMOOTH-ON. (2017) Dragon skin. [Online]. Available: https://www.smooth-on.com/product-
line/dragon-skin/
[41] D. E. Whitney, “Resolved motion rate control of manipulators and human prostheses,” IEEE
Transactions on man-machine systems, vol. 10, no. 2, pp. 47–53, 1969.
[42] J. P. Merlet, “Jacobian, Manipulability, Condition Number, and Accuracy of Parallel Robots,”
Journal of Mechanical Design, vol. 128, no. 1, pp. 199-206, 2005
[43] E. Cuevas, D. Zaldivar, and R. Rojas, “Bipedal robot description,” Technical Report B-03-19, 2004.
[44] S. Kajita, F. Kanehiro, K. Kaneko, K. Fujiwara, K. Harada, K. Yokoi, and H. Hirukawa, “Biped
Walking Pattern Generation by using Preview Control of Zero-Moment Point,” IEEE International
Conference on Robotics and Automation, 2003, pp. 1620-1626.
[45] A. W. Winkler, C. Mastalli, I. Havoutis, M. Foucchi, D. G. Caldwell, and C. Semini, “Planning
and Execution of Dynamic Whole-Body Locomotion for Hydraulic Quadruped on Challenging Terrain,”
IEEE International Conference on Robotics and Automation, 2015, pp. 5148-5154.

47
[46] R. B. McGhee and A. A. Frank, “On the stability properties of quadruped creeping gaits,”
Mathematical Biosciences, vol. 3, pp. 331–351, 1968.
[47] D. J. Pack and A. C. Kak, “A Simplified Forward Gait Control for a Quadruped Walking Robot,”
IEEE Intelligent Robots and Systems, 1994, pp. 1011-1017.
[48] S.-M. Song and K. J. Waldron, “An analytical approach for gait study and its applications on wave
gaits,” The International Journal of Robotics Research, vol. 6, no. 2, pp. 60–71, 1987.
[49] D. Messuri and C. Klein, “Automatic body regulation for maintaining stability of a legged vehicle
during rough-terrain locomotion,” IEEE Journal on Robotics and Automation, vol. 1, no. 3, pp. 132–
141, 1985.
[50] S. Hirose, H. Tsukagoshi, and K. Yoneda, “Normalized energy stability margin and its contour of
walking vehicles on rough terrain,” in IEEE International Conference on Robotics and Automation, vol.
1, 2001, pp. 181–186.
[51] Coppelia Robotics. (2017) V-REP. [Online]. Available: http://www.coppeliarobotics.com/