a design concept for a robotic lunar regolith harvesting system stanford lunar regolith excavation...
TRANSCRIPT

A Design Conceptfor a Robotic Lunar Regolith Harvesting
System
Stanford Lunar Regolith Excavation Presentation Authors:Matthew Maniscalco, Nicolas Lee, Nathan Salowitz, Forrest Hetherington, Elizabeth Grote, Shandor Dektor, and Professor Robert Twiggs
ICRA '07 Space Robotics Workshop April 14, 2007, Rome, Italy
Presentation Outline
• Motivation for Robotic Regolith Harvesting• Lunar Environment• Robotic System Requirements
– Tasks– Constraints
• System Concept– Modularity– Semi-Autonomous Control System– Supporting Infrastructure
http://universe-review.ca/I14-13-Moonbase.jpg
Motivation for Robotic Regolith Harvesting
• Establish a permanent moon base– Robotic preparation of station and site– In-situ resource utilization (ISRU)“Never send a human to do a robot’s job”
• Save money • Reduce risk http://universe-review.ca/I14-13-Moonbase.jpg

Lunar Environment• Radiation
– Lunar radiation environment consists of solar wind, solar flares, and cosmic rays
– Destructive for both humans and machinery
• Composition of regolith– Oxides of:
Si, Fe, Al, Ca, Mg, Ti, Na, Cr, Mn, K, P, and S
• Uses/products from regolith– Oxygen– Building materials – Helium-3– Ultimately more complex
products• Solar panels, computer chips,
fiberglass www.moonminer.com/MOONDUST-ON-BLACK-RSC.JPG

Lunar Environment
• Adverse regolith characteristics – dust– Fine– Sharp– Electrostatically attracted
http://www.gc.maricopa.edu/earthsci/imagearchive/Coralpnk1.JPGhttp://www.astro.virginia.edu/class/oconnell/astr121/moondust.html

Robotic System Constraints Dust Migration
• Anthropogenic– Launches and landings
– Construction
– Regolith excavation
• Natural– Terminator – Day night ion charging
– Meteor impacts
http://vesuvius.jsc.nasa.gov/er/seh/sei52.GIF

Robotic System Requirements
• Tasks– Construction– Harvesting of Regolith
• Constraints– Radiation Protection– Dust Mitigation– Operational Efficiency
http://ares.jsc.nasa.gov/HumanExplore/Exploration/EXLibrary/DOCS/Images/EIC033-2.GIF

Robotic System TasksConstruction
• Assembly tasks• Radiation protection
– Bury manned structures– Robotics reduce EVA trips/time
• Dust mitigation– Reduced EVA’s– Constant Cleaning
• Landing and launch port• Solar collection stations• Rover repair station• Cleaning systems (electrostatic, ultrasonic, physical
sweepers, fluids)
http://www.affordablespaceflight.com/moonbase.gif
Robotic System Tasks
Harvesting Regolith
• Harvesting tasks– Clean– Clear– Dig– Transport
http://www.psrd.hawaii.edu/WebImg/lunox.gif

Robotic System Constraints Radiation Protection
• Radiation hardened electronics
• Robust and simple software– Suitable for rad hard (slower) processors – Failures easily detected and corrected

Robotic System Constraints Dust Mitigation
• Four level approach– Prevention– Containment– Equipment Protection– Durable Design
http://nssdc.gsfc.nasa.gov/planetary/lunar/images/as11_40_5878.jpg

Robotic System Constraints Operational Efficiency
• Problems– Specific cost of launch– Different rates of wear on equipment – Downtime for repair and recharge
• Solution– Modularity
• Less total equipment• Replace worn parts• Operate during repair & recharge
http://www.nasa.gov/images/content/149768main_calv_launch_330.jpg

The System Concept
• Modularity– The Core Platform– The Suite of Modules
• Semi-Autonomous Control System • Supporting Infrastructure
The System ConceptModularity
• Flexibility of 3-point PTO for tractors– Maximizes functions performed by mass
• Worn out parts can easily be replaced– Minimizes downtime for part repair– Allows full use of parts with different lifespans
• Swappable batteries– No recharge downtime for rovers

The System ConceptThe Core Platform
• Power system, electronics, control, data handling, and communication

The System ConceptThe Core Platform
• Interface: 3-points and wiring
The System ConceptThe Suite of Modules
• Blade Actuator Module (BAM) - Bulldozer• Regolith Transportation Module (RTM) - Truck• Integrated Conveyor Module (ICM) - Excavator
– Rotating Wheel Attachment (RWA) - Wheel digger– Rotating Sweeper Attachment (RSA) - Power broom
• Articulated Digging Module (ADM) - Backhoe• Articulated Loading Module (ALM) - Loader

The System ConceptThe Suite of Modules
• Blade Actuator Module (BAM) - Bulldozer
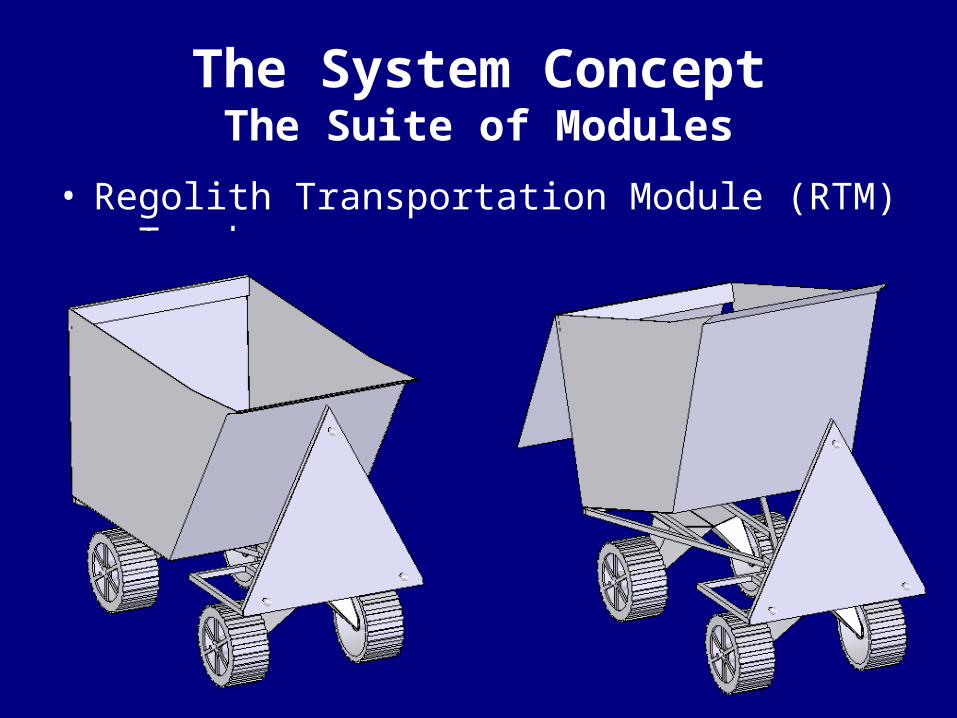
The System ConceptThe Suite of Modules
• Regolith Transportation Module (RTM) - Truck
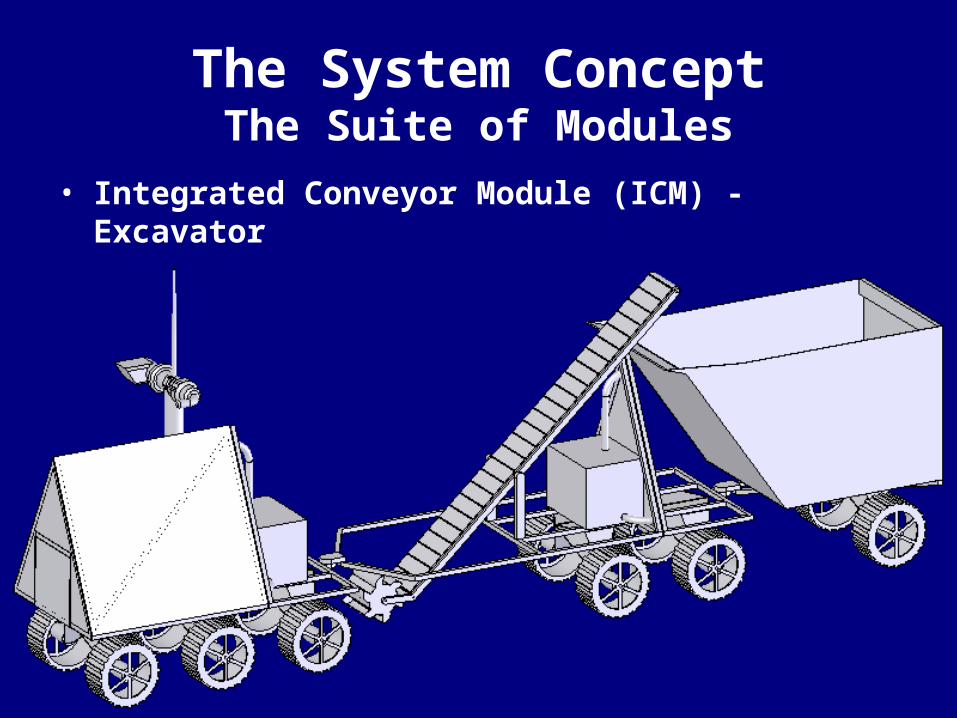
The System ConceptThe Suite of Modules
• Integrated Conveyor Module (ICM) - Excavator
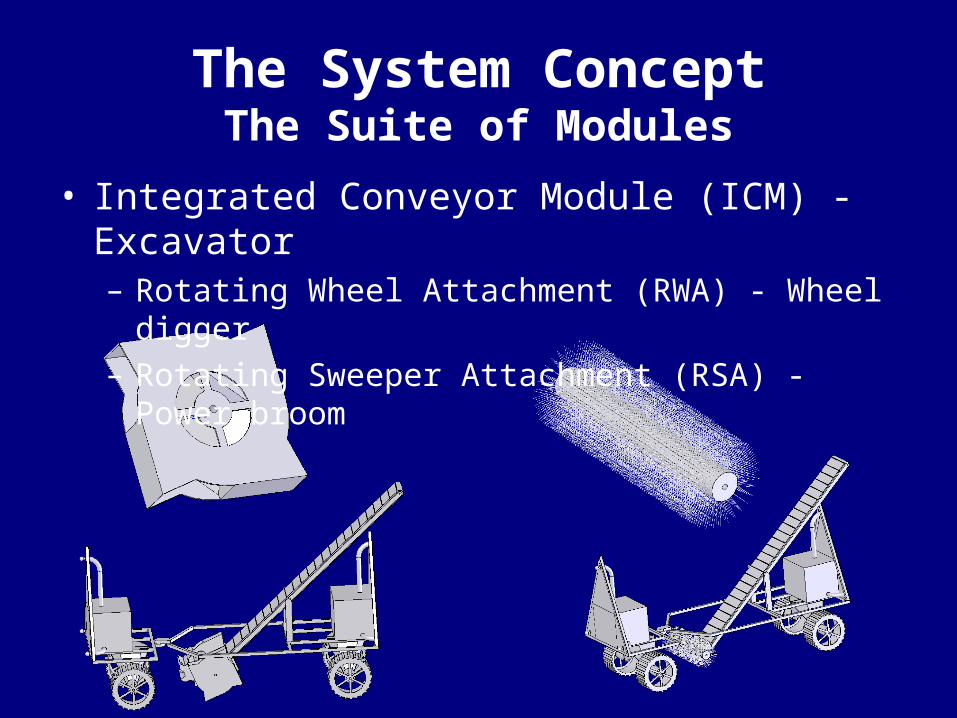
The System ConceptThe Suite of Modules
• Integrated Conveyor Module (ICM) - Excavator– Rotating Wheel Attachment (RWA) - Wheel digger– Rotating Sweeper Attachment (RSA) - Power broom
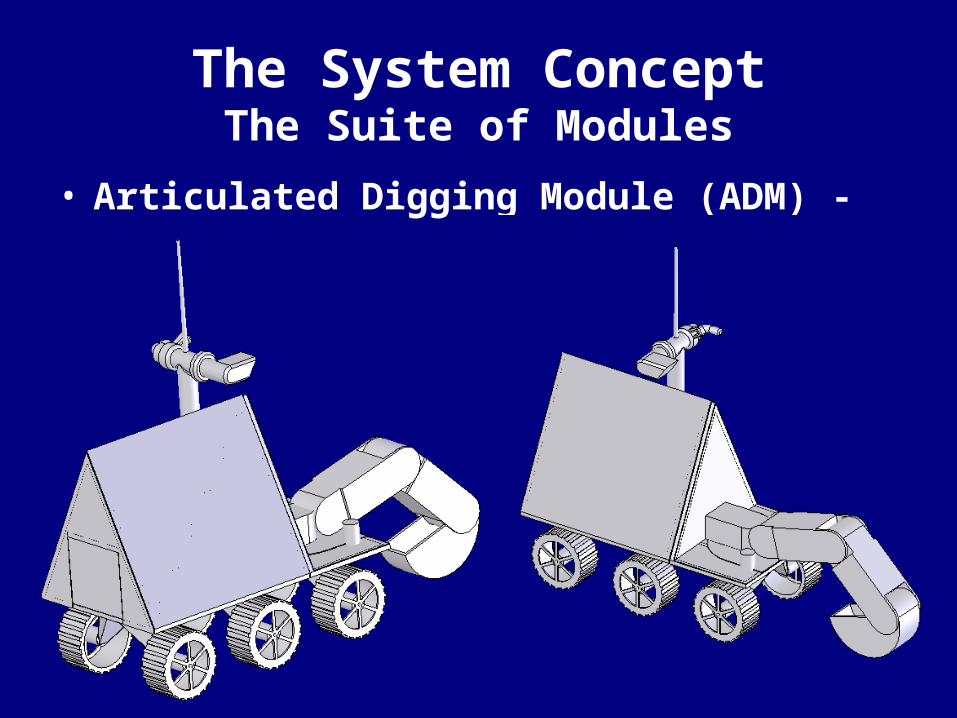
The System ConceptThe Suite of Modules
• Articulated Digging Module (ADM) - Backhoe
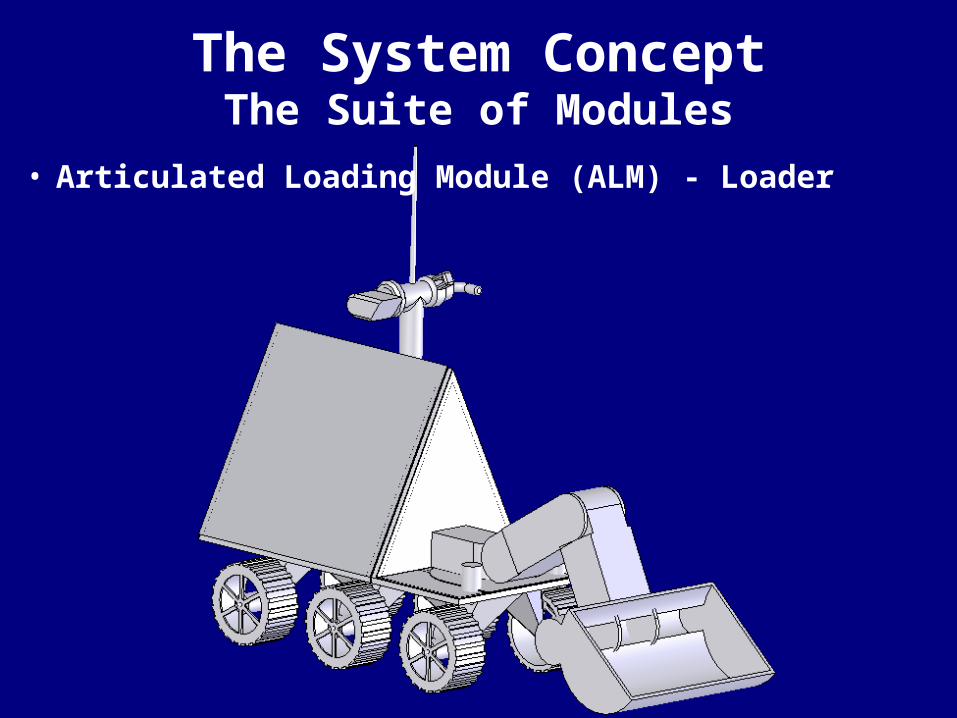
The System ConceptThe Suite of Modules
• Articulated Loading Module (ALM) - Loader

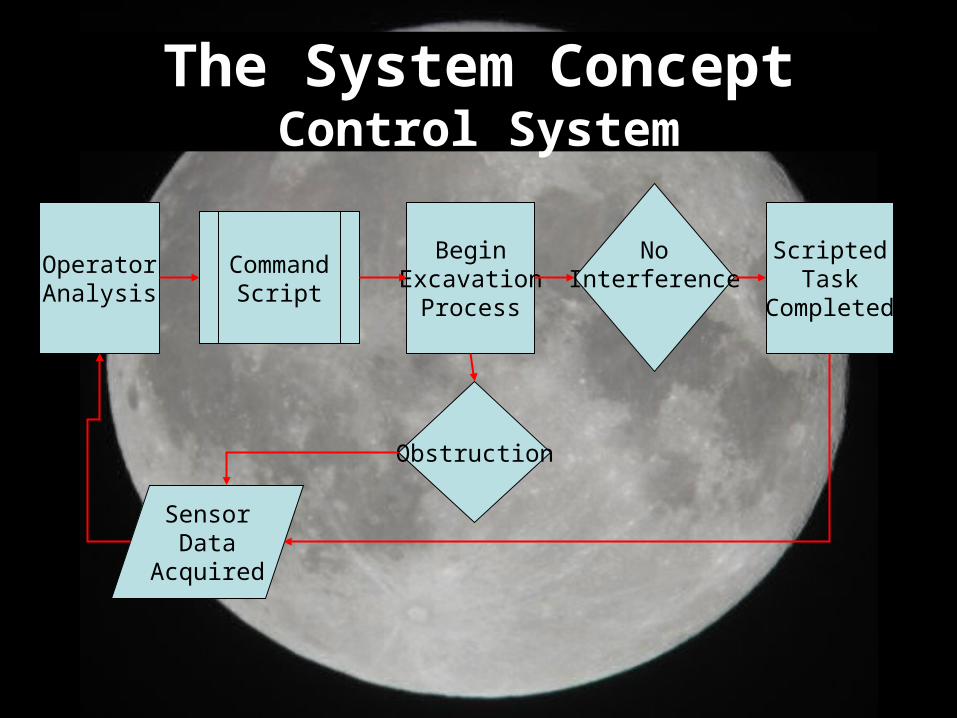
The System ConceptControl System
• Machine tool style task assignments– High level thinking and analysis
done elsewhere, CNC script sent robots.
• Semi-autonomy– Advantages over haptic, force-
feedback– Advantages over fully autonomous
http://www.belmont.k12.ca.us/ralston/programs/itech/SpaceSettlement/spaceresvol4/images/humanfig19.JPG
CommandScript
ScriptedTask
Completed
SensorData
Acquired
Obstruction
OperatorAnalysis
NoInterference
BeginExcavation
Process
The System ConceptControl System

The System ConceptSupporting Infrastructure
• Solar Recharging Station
• Repair/Reassignment Shop
• Regolith Processing Facility– Conveyor system
• Human Habitat
• The Port – landing and launch http://www.hardyart.demon.co.uk/webimage/advbase.jpg

The System ConceptSupporting Infrastructure
Lower DustTolerance
Higher DustTolerance
Geographic Separation
ThePort
Habitat
SolarStation
RepairShop
RegolithProcessing
Facility
RegolithExcavation
andConveyor
Area
Conclusion
• Modular, Semi-Autonomous System– Lowers cost– Increases power and mass efficiency– Increases versatility– Reduces human exposure to dust and
radiation– Harvests resources and frees astronauts for
less mundane tasks
http://www.thespacereview.com/archive/93a.jpg

CreditsThanks to:
SSDL, Stellar Solutions, Pumpkin Inc., Stanford on the Moon, andNASA for public domain imagesAdditional Student Contributors:James Mack, Dave Johnson, Katie Davis, Geoffrey Bower, Jordan McRae
http://icb.nasa.gov/2003_Annual_Report/lunar_rover_II.jpg

The End