a compiler framework for loop nest software-pipelining · a compiler framework for loop nest...
TRANSCRIPT

A COMPILER FRAMEWORK
FOR LOOP NEST SOFTWARE-PIPELINING
by
Alban Douillet
A dissertation submitted to the Faculty of the University of Delaware in partialfulfillment of the requirements for the degree of Doctor of Philosophy in Computer Sci-ence
Summer 2006
c© 2006 Alban DouilletAll Rights Reserved

A COMPILER FRAMEWORK
FOR LOOP NEST SOFTWARE-PIPELINING
by
Alban Douillet
Approved:B. David Saunders, Ph.D.Chair of the Department of Computer and Information Sciences
Approved:Thomas M. Apple, Ph.D.Dean of the College of Arts and Sciences
Approved:Conrado M. Gempesaw II, Ph.D.Vice Provost for Academic and International Programs
I certify that I have read this dissertation and that in my opinion it meets theacademic and professional standard required by the University as a dissertationfor the degree of Doctor of Philosophy.
Signed:Guang R. Gao, Ph.D.Professor in charge of dissertation
I certify that I have read this dissertation and that in my opinion it meets theacademic and professional standard required by the University as a dissertationfor the degree of Doctor of Philosophy.
Signed:Lori Pollock, Ph.D.Professor in charge of dissertation
I certify that I have read this dissertation and that in my opinion it meets theacademic and professional standard required by the University as a dissertationfor the degree of Doctor of Philosophy.
Signed:Martin Swany, Ph.D.Member of dissertation committee
I certify that I have read this dissertation and that in my opinion it meets theacademic and professional standard required by the University as a dissertationfor the degree of Doctor of Philosophy.
Signed:Fouad Kiamilev, Ph.D.Member of dissertation committee
ACKNOWLEDGEMENTS
I would like to acknowledge my advisor, Prof. Guang R. Gao, for his support
during those years. He allowed me to work in very favorable conditions while made sure
that I had all the help I needed. His many pieces of advice always happened to be helpful
both on a professional and on a personal level.
This work would have never happened without Dr. Hongbo Rong. He let me work
with him on the SSP project in its early phases and then let me develop my own line of
research. I will always be grateful for his patience during our many heated discussions.
He taught me a lot about persevering and believing in your own work. He also set the bar
higher than I would have myself and motivated me to reach it and go beyond.
Such a large project would not have been possible without the participation of
others. First Dr. Shuxin Yang for porting the Open64 compiler to the IBM Cyclops
architecture in such a short time. Then Juan del Cuvillo for his very helpful answers to
my questions about the architecture. Finally the rest of the Cyclops development team at
ETI including Dr. Ziang Hu, Dr. Haiping Wu, and Weirong Zhu.
I also would like to thank my family for supporting me during all those years.
Despite the distance, they always approved any of my decisions.
Finally my girlfriend, Nina Hansen, was very supportive during the last busy
months of the writing. She showed me the bright side in everything and always kept
me in good spirits.
iv

In memory of my grandfathers Georges Douillet and Charles Binaux.
v

TABLE OF CONTENTS
LIST OF FIGURES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . xivLIST OF TABLES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . xxiABSTRACT . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . xxii
Chapter
1 INTRODUCTION . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.1 Towards Cellular Architectures . . . . . . . . . . . . . . . . . . . . . . 21.2 Problem Description . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31.3 Contributions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41.4 Synopsis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
2 BACKGROUND . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
2.1 Software-Pipelining . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
2.1.1 Overview . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82.1.2 Modulo Scheduling . . . . . . . . . . . . . . . . . . . . . . . . 92.1.3 Clustered-VLIW Software-Pipelining . . . . . . . . . . . . . . . 13
2.2 The Intel Itanium architecture . . . . . . . . . . . . . . . . . . . . . . . 13
2.2.1 Features . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 142.2.2 Experimental Framework . . . . . . . . . . . . . . . . . . . . . 17
2.3 The IBM 64-bit Cyclops Architecture . . . . . . . . . . . . . . . . . . . 19
2.3.1 Generic Cellular Architectures . . . . . . . . . . . . . . . . . . . 192.3.2 The IBM 64-bit Cyclops Architecture . . . . . . . . . . . . . . . 212.3.3 Experimental Framework . . . . . . . . . . . . . . . . . . . . . 23
vi

3 SINGLE-DIMENSION SOFTWARE PIPELINING . . . . . . . . . . . . . 24
3.1 Problem Description . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
3.1.1 Motivation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 253.1.2 Problem Statement . . . . . . . . . . . . . . . . . . . . . . . . . 26
3.2 SSP Theory . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
3.2.1 Loop Selection . . . . . . . . . . . . . . . . . . . . . . . . . . . 283.2.2 Dependence Graph Simplification . . . . . . . . . . . . . . . . . 283.2.3 One-Dimensional Scheduling . . . . . . . . . . . . . . . . . . . 303.2.4 Multi-Dimensional Scheduling . . . . . . . . . . . . . . . . . . 323.2.5 Properties . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
3.3 SSP Implementation . . . . . . . . . . . . . . . . . . . . . . . . . . . . 343.4 Examples & Notations . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
3.4.1 SSP vs. MS Example . . . . . . . . . . . . . . . . . . . . . . . 363.4.2 Double Loop Nest Example . . . . . . . . . . . . . . . . . . . . 393.4.3 Triple Loop Nest Example . . . . . . . . . . . . . . . . . . . . . 433.4.4 Kernel Notations . . . . . . . . . . . . . . . . . . . . . . . . . . 46
3.5 One-Dimensional Schedule Constraints . . . . . . . . . . . . . . . . . . 47
3.5.1 Perfect Loop Nests . . . . . . . . . . . . . . . . . . . . . . . . . 483.5.2 Imperfect Loop Nests & Single Initiation Interval . . . . . . . . . 503.5.3 Imperfect Loop Nests & Multiple Initiation Intervals . . . . . . . 51
3.6 Schedule Function . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
3.6.1 Perfect Loop Nests . . . . . . . . . . . . . . . . . . . . . . . . . 543.6.2 Imperfect Loop Nests & Single Initiation Interval . . . . . . . . . 643.6.3 Imperfect Loop Nests & Multiple Initiation Intervals . . . . . . . 73
3.7 Experimental Results . . . . . . . . . . . . . . . . . . . . . . . . . . . 73
3.7.1 Benchmarks . . . . . . . . . . . . . . . . . . . . . . . . . . . . 733.7.2 Execution Time . . . . . . . . . . . . . . . . . . . . . . . . . . 74
vii

3.7.3 Impact of Loop transformations . . . . . . . . . . . . . . . . . . 773.7.4 Cache Misses Analysis . . . . . . . . . . . . . . . . . . . . . . 78
3.8 Related Work . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 80
3.8.1 Hierarchical Scheduling . . . . . . . . . . . . . . . . . . . . . . 803.8.2 Software-Pipelining with Loop Nest Optimizations . . . . . . . . 813.8.3 Loop Nest Linear Scheduling . . . . . . . . . . . . . . . . . . . 84
4 LOOP SELECTION . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 85
4.1 Initiation Interval . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 85
4.1.1 Recurrence Minimum Initiation Interval . . . . . . . . . . . . . . 864.1.2 Resource Minimum Initiation Interval . . . . . . . . . . . . . . . 87
4.2 Memory Accesses . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 87
5 SCHEDULER . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 89
5.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 895.2 Problem Description . . . . . . . . . . . . . . . . . . . . . . . . . . . . 90
5.2.1 Problem Statement . . . . . . . . . . . . . . . . . . . . . . . . . 905.2.2 Issues . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92
5.3 Solution . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 93
5.3.1 Overview . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 935.3.2 Scheduling Approaches . . . . . . . . . . . . . . . . . . . . . . 95
5.3.2.1 Flat Approach . . . . . . . . . . . . . . . . . . . . . . 955.3.2.2 Level-by-Level Approach . . . . . . . . . . . . . . . . 965.3.2.3 Hybrid Approach . . . . . . . . . . . . . . . . . . . . 97
5.3.3 Enforcement of the Scheduling Constraints . . . . . . . . . . . . 97
5.3.3.1 Dependence Constraint . . . . . . . . . . . . . . . . . 975.3.3.2 Sequential Constraint . . . . . . . . . . . . . . . . . . 100
viii

5.3.3.3 Innermost Level Separation Constraint . . . . . . . . . 100
5.3.4 Subkernels Integrity . . . . . . . . . . . . . . . . . . . . . . . . 1015.3.5 Scheduling Priority . . . . . . . . . . . . . . . . . . . . . . . . 1015.3.6 Operation Scheduling . . . . . . . . . . . . . . . . . . . . . . . 1025.3.7 Initiation Interval Increment Methods . . . . . . . . . . . . . . . 103
5.4 Experiments . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 103
5.4.1 Comparison of the Scheduling Approaches . . . . . . . . . . . . 1045.4.2 Comparison of the Scheduling Priorities . . . . . . . . . . . . . . 1055.4.3 Comparison of the Initiation Interval Increment Method . . . . . 106
5.5 Related Work . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1075.6 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 107
6 REGISTER PRESSURE EVALUATION . . . . . . . . . . . . . . . . . . . 109
6.1 Problem Description . . . . . . . . . . . . . . . . . . . . . . . . . . . . 109
6.1.1 Motivation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1096.1.2 Notations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1116.1.3 Problem Statement . . . . . . . . . . . . . . . . . . . . . . . . . 1126.1.4 Issues . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 113
6.2 Solution . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 114
6.2.1 Overview . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1146.2.2 Cross-Iteration Lifetimes . . . . . . . . . . . . . . . . . . . . . 1166.2.3 Local Lifetimes . . . . . . . . . . . . . . . . . . . . . . . . . . 1186.2.4 Register Pressure . . . . . . . . . . . . . . . . . . . . . . . . . 1196.2.5 Time Complexity . . . . . . . . . . . . . . . . . . . . . . . . . 122
6.3 Experimental Results . . . . . . . . . . . . . . . . . . . . . . . . . . . 122
6.3.1 Register Pressure Computation Time . . . . . . . . . . . . . . . 1236.3.2 Register Pressure . . . . . . . . . . . . . . . . . . . . . . . . . 1256.3.3 Register File Size . . . . . . . . . . . . . . . . . . . . . . . . . 126
ix
7 REGISTER ALLOCATION . . . . . . . . . . . . . . . . . . . . . . . . . . 129
7.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1297.2 MS Register Allocation . . . . . . . . . . . . . . . . . . . . . . . . . . 129
7.2.1 Scalar and Vector Lifetimes . . . . . . . . . . . . . . . . . . . . 1307.2.2 Space-Time Cylinder . . . . . . . . . . . . . . . . . . . . . . . 1317.2.3 Problem Formulation . . . . . . . . . . . . . . . . . . . . . . . 1327.2.4 Register Allocation Solution . . . . . . . . . . . . . . . . . . . . 132
7.3 Problem Description . . . . . . . . . . . . . . . . . . . . . . . . . . . . 133
7.3.1 SSP Lifetimes Features . . . . . . . . . . . . . . . . . . . . . . 1337.3.2 Problem Formulation . . . . . . . . . . . . . . . . . . . . . . . 1357.3.3 Terminology . . . . . . . . . . . . . . . . . . . . . . . . . . . . 136
7.3.3.1 Dynamic Views of the Lifetimes . . . . . . . . . . . . 1367.3.3.2 Register Distances . . . . . . . . . . . . . . . . . . . 137
7.4 Solution . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 141
7.4.1 Overview . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1417.4.2 Lifetimes Normalization . . . . . . . . . . . . . . . . . . . . . . 1417.4.3 Lifetimes Representation . . . . . . . . . . . . . . . . . . . . . 144
7.4.3.1 Core Parameters . . . . . . . . . . . . . . . . . . . . . 1447.4.3.2 Derived Parameters . . . . . . . . . . . . . . . . . . . 146
7.4.4 Minimum Register Distance Computation . . . . . . . . . . . . . 148
7.4.4.1 Conservative Distance . . . . . . . . . . . . . . . . . . 1487.4.4.2 Aggressive Distance . . . . . . . . . . . . . . . . . . 1517.4.4.3 Property . . . . . . . . . . . . . . . . . . . . . . . . . 154
7.4.5 Lifetimes Insertion . . . . . . . . . . . . . . . . . . . . . . . . . 1547.4.6 Circumference Minimization . . . . . . . . . . . . . . . . . . . 156
x

7.4.7 Time Complexity . . . . . . . . . . . . . . . . . . . . . . . . . 158
7.5 Experimental Results . . . . . . . . . . . . . . . . . . . . . . . . . . . 158
7.5.1 Experimental Framework . . . . . . . . . . . . . . . . . . . . . 1587.5.2 Register Requirements . . . . . . . . . . . . . . . . . . . . . . . 1607.5.3 Lifetime Insertion Strategies . . . . . . . . . . . . . . . . . . . . 1627.5.4 Execution Time . . . . . . . . . . . . . . . . . . . . . . . . . . 1627.5.5 Single Loops . . . . . . . . . . . . . . . . . . . . . . . . . . . . 163
7.6 Related Work . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1637.7 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 163
8 CODE GENERATION . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 165
8.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1658.2 Problem Description . . . . . . . . . . . . . . . . . . . . . . . . . . . . 166
8.2.1 Notations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 166
8.2.1.1 Double Loop Nest . . . . . . . . . . . . . . . . . . . . 1668.2.1.2 Triple or Deeper Loop Nest . . . . . . . . . . . . . . . 168
8.2.2 Problem Statement . . . . . . . . . . . . . . . . . . . . . . . . . 1698.2.3 Issues . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 171
8.3 Solution . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 172
8.3.1 Code Layout . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1728.3.2 Repeating Patterns Emission . . . . . . . . . . . . . . . . . . . . 1748.3.3 Loop Control . . . . . . . . . . . . . . . . . . . . . . . . . . . 1778.3.4 Conditional Execution of Stages . . . . . . . . . . . . . . . . . . 1788.3.5 Loop Counters Initialization . . . . . . . . . . . . . . . . . . . . 1798.3.6 Register Rotation Emulation . . . . . . . . . . . . . . . . . . . . 1798.3.7 Innermost Level Separation Constraint . . . . . . . . . . . . . . 181
8.4 Example . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1838.5 Experimental Results . . . . . . . . . . . . . . . . . . . . . . . . . . . 187
8.5.1 Execution Time . . . . . . . . . . . . . . . . . . . . . . . . . . 1878.5.2 Code Size . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 188
xi

8.5.3 Bundle Density . . . . . . . . . . . . . . . . . . . . . . . . . . 189
8.6 Related Work . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1898.7 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 190
9 MULTI-THREADED SSP . . . . . . . . . . . . . . . . . . . . . . . . . . . 191
9.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1919.2 Problem Description . . . . . . . . . . . . . . . . . . . . . . . . . . . . 192
9.2.1 Problem Statement . . . . . . . . . . . . . . . . . . . . . . . . . 1929.2.2 Issues . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 192
9.3 Multi-Threaded SSP Theory . . . . . . . . . . . . . . . . . . . . . . . . 193
9.3.1 Multi-Threaded Final Schedule . . . . . . . . . . . . . . . . . . 1939.3.2 Multi-Threaded Schedule Function . . . . . . . . . . . . . . . . 197
9.4 IBM 64-bit Cyclops Implementation . . . . . . . . . . . . . . . . . . . . 200
9.4.1 Overview . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2009.4.2 Synchronization . . . . . . . . . . . . . . . . . . . . . . . . . . 2009.4.3 Innermost Loop Tiling . . . . . . . . . . . . . . . . . . . . . . . 2039.4.4 Synchronization Bootstrapping . . . . . . . . . . . . . . . . . . 2069.4.5 Cross-Iteration Register Dependences . . . . . . . . . . . . . . . 2079.4.6 Code Generation Algorithms . . . . . . . . . . . . . . . . . . . 2099.4.7 Correctness . . . . . . . . . . . . . . . . . . . . . . . . . . . . 214
9.5 Experimental Results . . . . . . . . . . . . . . . . . . . . . . . . . . . 215
9.5.1 Execution Time Speedup . . . . . . . . . . . . . . . . . . . . . 2169.5.2 Loop Tiling Factor . . . . . . . . . . . . . . . . . . . . . . . . . 2179.5.3 Synchronization Stalls . . . . . . . . . . . . . . . . . . . . . . . 2189.5.4 Register Pressure . . . . . . . . . . . . . . . . . . . . . . . . . 218
9.6 Related Work . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2199.7 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 220
10 CONCLUSION . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 222
10.1 Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 222
xii

10.2 Future Work . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 225
BIBLIOGRAPHY . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 227
xiii

LIST OF FIGURES
2.1 Single Loop Example . . . . . . . . . . . . . . . . . . . . . . . . . . 9
2.2 Single Loop Schedule Example . . . . . . . . . . . . . . . . . . . . . 10
2.3 Single Loop MS Schedule Example . . . . . . . . . . . . . . . . . . . 11
2.4 Software-Pipelining for the Itanium Architecture . . . . . . . . . . . . 16
2.5 SSP Implementation in Open64 . . . . . . . . . . . . . . . . . . . . . 18
2.6 Generic Cellular Architecture Example . . . . . . . . . . . . . . . . . 20
2.7 An IBM 64-bit Cyclops Chip . . . . . . . . . . . . . . . . . . . . . . 22
3.1 SSP Theory Framework . . . . . . . . . . . . . . . . . . . . . . . . . 28
3.2 Zero and Positive Dependences in the Iteration Space . . . . . . . . . . 30
3.3 Kernel Example . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
3.4 Kernel in the Final Schedule Example if N2 = 1 . . . . . . . . . . . . 31
3.5 Multi-Dimensional Scheduling Example . . . . . . . . . . . . . . . . 33
3.6 The SSP Framework . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
3.7 MS vs. SSP: Loop Nest . . . . . . . . . . . . . . . . . . . . . . . . . 37
3.8 MS vs. SSP: Kernel . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
3.9 MS vs. SSP: MS Schedules . . . . . . . . . . . . . . . . . . . . . . . 38
3.10 MS vs. SSP: SSP Schedule . . . . . . . . . . . . . . . . . . . . . . . 39
xiv

3.11 Double Loop Nest Example: Inputs . . . . . . . . . . . . . . . . . . . 40
3.12 Double Loop Nest Example: Loop Nest After Loop Selection . . . . . 40
3.13 Double Loop Nest Example: 1-D Schedule . . . . . . . . . . . . . . . 41
3.14 Double Loop Nest Example: Final Schedule . . . . . . . . . . . . . . 42
3.15 Triple Loop Nest Example: Kernel . . . . . . . . . . . . . . . . . . . 44
3.16 Triple Loop Nest Example: Schedule . . . . . . . . . . . . . . . . . . 45
3.17 Generic SSP Kernel . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
3.18 1-D Schedule Constraints in the case of Perfect Loop Nests . . . . . . . 48
3.19 Sequential Constraint Example . . . . . . . . . . . . . . . . . . . . . 49
3.20 1-D Schedule Constraints in the Case of Imperfect Loop Nests andSingle Initiation Interval . . . . . . . . . . . . . . . . . . . . . . . . . 50
3.21 1-D Schedule Constraints in the Case of Imperfect Loop Nests andMultiple Initiation Intervals . . . . . . . . . . . . . . . . . . . . . . . 52
3.22 Unused Cycles Computation Examples . . . . . . . . . . . . . . . . . 54
3.23 Perfect Loop Nest: Schedule Example of Operation op at iteration index(5, 1, 1) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
3.24 Schedule Function for Perfect Loop Nests . . . . . . . . . . . . . . . . 57
3.25 Schedule Function for Imperfect Loop Nests with Single InitiationInterval . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
3.26 Matrix Multiply Speedups . . . . . . . . . . . . . . . . . . . . . . . . 75
3.27 HD Benchmark Speedup . . . . . . . . . . . . . . . . . . . . . . . . 76
3.28 SPEC2000 Benchmarks Speedups . . . . . . . . . . . . . . . . . . . . 77
3.29 Speedup of the jki Variant of MM after Loop Tiling . . . . . . . . . . . 77
xv

3.30 Speedup of the jki Variant of MM after Unroll-and-Jam . . . . . . . . . 78
3.31 Cache Misses Results for the MM Variants . . . . . . . . . . . . . . . 79
3.32 Hierarchical Scheduling vs. Software-Pipelining Example . . . . . . . 82
5.1 1-D Schedule Constraints in the Case of Imperfect Loop Nests andMultiple Initiation Intervals . . . . . . . . . . . . . . . . . . . . . . . 91
5.2 Strict Initiation Rate of Subkernels . . . . . . . . . . . . . . . . . . . 93
5.3 Truncation of Subkernels . . . . . . . . . . . . . . . . . . . . . . . . 93
5.4 Examples of Poor II Increment Decisions . . . . . . . . . . . . . . . . 94
5.5 Scheduling Framework . . . . . . . . . . . . . . . . . . . . . . . . . 95
5.6 Advantage of the Flat Approach over the Level-by-Level Approach . . . 96
5.7 Scheduling Blocks Example . . . . . . . . . . . . . . . . . . . . . . . 100
5.8 Execution Time Speedup vs. Modulo Scheduling . . . . . . . . . . . . 104
5.9 Comparison of the Scheduling Priorities . . . . . . . . . . . . . . . . . 105
5.10 Comparison of the Initiation Interval Increment Methods . . . . . . . . 106
6.1 SSP Framework . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 110
6.2 Scalar Lifetimes Notations Example . . . . . . . . . . . . . . . . . . . 111
6.3 Irregular Pattern of the Scalar Lifetimes . . . . . . . . . . . . . . . . . 113
6.4 Scalar Lifetimes Variance Within Different Instances of the Same Stage 114
6.5 Scalar Lifetimes in the Final Schedule Example . . . . . . . . . . . . . 115
6.6 Cross-Iteration Lifetimes Algorithm . . . . . . . . . . . . . . . . . . . 117
6.7 Cross-Iteration Lifetimes Computation Example . . . . . . . . . . . . 118
xvi

6.8 Local Lifetimes Algorithm . . . . . . . . . . . . . . . . . . . . . . . 120
6.9 Local Lifetimes Computation Example . . . . . . . . . . . . . . . . . 121
6.10 Register Pressure Computation Time . . . . . . . . . . . . . . . . . . 123
6.11 Speedup vs. the Register Allocator . . . . . . . . . . . . . . . . . . . 124
6.12 Register Pressure . . . . . . . . . . . . . . . . . . . . . . . . . . . . 125
6.13 Ration of Loops Amenable to SSP . . . . . . . . . . . . . . . . . . . . 126
6.14 Total Register Pressure and FP/INT Ratio . . . . . . . . . . . . . . . . 127
6.15 FP Register Pressure Progression . . . . . . . . . . . . . . . . . . . . 128
7.1 Vector Lifetime Examples . . . . . . . . . . . . . . . . . . . . . . . . 131
7.2 Space-Time Cylinder with Optimal Register Allocation . . . . . . . . . 132
7.3 Double Loop Nest Example . . . . . . . . . . . . . . . . . . . . . . . 133
7.4 Double Loop Nest Example Schedule with Lifetime of Variant y . . . . 134
7.5 Simplest Form Examples . . . . . . . . . . . . . . . . . . . . . . . . 136
7.6 Ideal Form Examples . . . . . . . . . . . . . . . . . . . . . . . . . . 138
7.7 Final Form Examples . . . . . . . . . . . . . . . . . . . . . . . . . . 139
7.8 Register Distance Example . . . . . . . . . . . . . . . . . . . . . . . 140
7.9 Conservative Solution . . . . . . . . . . . . . . . . . . . . . . . . . . 140
7.10 Aggressive Solution . . . . . . . . . . . . . . . . . . . . . . . . . . . 140
7.11 Register Allocation Algorithm . . . . . . . . . . . . . . . . . . . . . . 141
7.12 Lifetime Normalization Example . . . . . . . . . . . . . . . . . . . . 142
7.13 Lifetime Normalization Algorithm . . . . . . . . . . . . . . . . . . . 143
xvii

7.14 Conservative Distance: Wands . . . . . . . . . . . . . . . . . . . . . . 148
7.15 Conservative Distance Computation . . . . . . . . . . . . . . . . . . . 150
7.16 Conservative Distance Example . . . . . . . . . . . . . . . . . . . . . 150
7.17 Aggressive Distance Computation . . . . . . . . . . . . . . . . . . . . 152
7.18 Aggressive Distance Example . . . . . . . . . . . . . . . . . . . . . . 153
7.19 Lifetime Insertion Algorithm . . . . . . . . . . . . . . . . . . . . . . 155
7.20 Lifetime Insertion Example . . . . . . . . . . . . . . . . . . . . . . . 156
7.21 Circumference Minimization Algorithm . . . . . . . . . . . . . . . . . 157
7.22 Cumulative Distribution of the Register Requirements for the Loop Nestsof Depth 2 or Higher . . . . . . . . . . . . . . . . . . . . . . . . . . . 161
8.1 Double Loop Nest Kernel . . . . . . . . . . . . . . . . . . . . . . . . 166
8.2 Double Loop Nest Final Schedule . . . . . . . . . . . . . . . . . . . . 167
8.3 Triple Loop Nest Kernel . . . . . . . . . . . . . . . . . . . . . . . . . 169
8.4 Triple Loop Nest Schedule . . . . . . . . . . . . . . . . . . . . . . . 170
8.5 Generated Code Skeleton . . . . . . . . . . . . . . . . . . . . . . . . 173
8.6 Patterns Expansion . . . . . . . . . . . . . . . . . . . . . . . . . . . 175
8.7 Stages Emission . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 176
8.8 Register Rotation Emulation Example . . . . . . . . . . . . . . . . . . 181
8.9 Conditional Emission for the Innermost Level Separation Constraint . . 182
8.10 Example Register-Allocated Kernel . . . . . . . . . . . . . . . . . . . 183
8.11 Example Assembly Code . . . . . . . . . . . . . . . . . . . . . . . . 184
xviii

8.12 Example Final Schedule . . . . . . . . . . . . . . . . . . . . . . . . . 185
8.13 Performance Speedup Relatively to MS . . . . . . . . . . . . . . . . . 187
8.14 Code Size Increase Relatively to MS . . . . . . . . . . . . . . . . . . 188
8.15 Bundle Density . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 189
9.1 Multi-Threaded SSP Schedule Example . . . . . . . . . . . . . . . . . 194
9.2 Without Synchronization Delay Example . . . . . . . . . . . . . . . . 196
9.3 With Synchronization Delay Example . . . . . . . . . . . . . . . . . . 197
9.4 Multi-Threaded Schedule Function for Imperfect Loop Nests with SingleInitiation Interval . . . . . . . . . . . . . . . . . . . . . . . . . . . . 199
9.5 The Multi-Threaded Final Schedule on an IBM 64-bit Cyclops chip . . 201
9.6 Synchronization Instructions Pseudo-Code . . . . . . . . . . . . . . . 202
9.7 Multi-Threaded SSP Schedule Control-Flow Graph for a Triple LoopNest . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 203
9.8 Location of the Synchronization Counters . . . . . . . . . . . . . . . . 204
9.9 Synchronization Tiling Example (G=2) . . . . . . . . . . . . . . . . . 205
9.10 Cross-Iteration Register Dependence Example . . . . . . . . . . . . . 208
9.11 Multi-Threaded Code Skeleton . . . . . . . . . . . . . . . . . . . . . 210
9.12 Loop Patterns Expansion . . . . . . . . . . . . . . . . . . . . . . . . 211
9.13 Stage Emission Algorithm . . . . . . . . . . . . . . . . . . . . . . . . 212
9.14 Initialization Code . . . . . . . . . . . . . . . . . . . . . . . . . . . . 213
9.15 Conclusion Code . . . . . . . . . . . . . . . . . . . . . . . . . . . . 214
9.16 Execution Time Absolute Speedup . . . . . . . . . . . . . . . . . . . 216
xix

9.17 Loop Tiling Factor . . . . . . . . . . . . . . . . . . . . . . . . . . . . 217
9.18 Register Pressure . . . . . . . . . . . . . . . . . . . . . . . . . . . . 219
xx

LIST OF TABLES
3.1 Classification of the Multi-Dimensional Dependences . . . . . . . . . . 29
7.1 Register Allocation Parameters Values Example . . . . . . . . . . . . . 144
7.2 Depth of the Tested Loop Nests . . . . . . . . . . . . . . . . . . . . . 159
8.1 Code Generation Issues and Solutions for Both Target Architectures . . 172
xxi
ABSTRACT
While improving the performance of micro-processors, computer architects have
recently reached a technology wall. Higher frequencies are not sustainable anymore.
The high and expensive power consumption and the lack of performance improvement
on those uniprocessors have lead chip manufacturer to instead provide multi-threading
capabilities to their current processor line. The trend goes further with multi-threaded
cellular architectures where a chip is composed of hundred of thread units interconnected
by an on-chip network and showing impressive raw performance numbers.
However, the problem of harnessing so much computational power has yet to be
solved. Several issues such as thread synchronization and programmability still exist.
This dissertation proposes an elegant method, named Single-dimension Software Pipelin-
ing (SSP) to address those issues for an important class of programming structures, espe-
cially in the scientific domain: loop nests, perfect and imperfect.
This dissertation shows how loop nests can be software-pipelined on both unipro-
cessor architectures and cellular architectures. The method subsumes modulo-scheduling
as a special case for single loops. The entire framework is explained and includes: the
handling of multi-dimensional dependences, the loop selection, the kernel generation, the
register pressure evaluation, the register allocation and the code generation for both cel-
lular architecture and uniprocessor architectures with dedicated loop hardware support.
The method was implemented in the Open64 compiler and tested on the Intel
Itanium architecture and on the IBM Cyclops64 architecture. Results show that SSP
schedules outperform modulo-scheduling schedules on uniprocessor architectures and ef-
ficiently use the computational power of the cellular architectures.
xxii
Chapter 1
INTRODUCTION
Parallel processing and data-flow were the buzz words of the 1980’s. Several com-
panies spurred in order to bring to market implementation ideas that had been developed
in research and academic labs. Computer performance was to come from highly parallel
machines. However, the results did not live up to the expectations. All those companies
either went bankrupt or redirected their efforts to dedicated niche markets.
The failure of parallel processing can be explained by several reasons [The99].
Mainly developing a whole new family of processors represents a huge investment which
requires immediate results in order to convince customers to switch to the new architec-
ture. Intel’s recent struggles with the Itanium architecture despite the enormous amount
of investment poured into the project is another example of those difficulties. However
performance is not the only criterion. The main reason behind the lack of success was
the lack of programmability. There was no easy way to extract performance from those
machines. Only institutions with the adequate budget and man power could afford using
this new breed of computers.
To fill the need for more computing power, computer architects turned their efforts
to other types of architectures. A standard von Neumann processor consists of a single
program counter which points to the instruction to be executed. Therefore, the number
of instructions executed per cycle (IPC) never exceeds 1. Increasing the performance of
computers would have to be achieved through going beyond an IPC of 1 and exploit-
ing the instruction level parallelism (ILP). That barrier was breached by the superscalar
1

and VLIW (Very-Long Instruction Word) architectures [HP03]. A superscalar processor
includes several functional units. At run-time, instructions within a given window may
be shuffled from their sequential order in order to be executed as soon as input data are
ready and a functional unit is available. The sequential order semantics is guaranteed.
VLIW processors are similar but the instructions are instead reordered by the compiler.
Instructions that are to be executed in parallel are packed in a single very long instruction
word.
Those two architectures represent the bulk of today’s processors. Unfortunately
the point of diminishing return has been reached. In order to continuously improve the
performance of the processors, architects increased the chip clock speed to unprecedented
levels. Intel even forecast that Xeon processors would be running at more than 10GHz
by the end of the decade. But such a speed comes with a cost. The instructions are
decomposed into micro-instructions and the pipelines of the functional units are made
deeper and deeper. Any interrupt then forces the entire pipeline to be flushed resulting
in an increased waste of precious computing cycles. Also, the use of micro-instructions
only artificially increases the IPC of a processor as the whole original instruction might
actually take longer to execute. Moreover, in order to bridge the performance gap between
the processor and the memory, increasing amounts of cache are moved onto the processor
itself. The result is a chip which computing power is concentrated in a small area. Because
of the high clock speed, that area heats up enormously leading to cooling and power
consumption problems. As a technological wall has been reached, it is now time to move
up to a new type of architecture.
1.1 Towards Cellular Architectures
To cope with the ever increasing power consumption, new architecture classes
were introduced. All have in common the duplication of the processing units within
a single chip. Because the number of transistors on a single chip doubles somewhat
every 18 months, multi-core processing was probably the easiest step towards a more
2

power-friendly solution. As more space on the chip is available, extra processors are
inserted. Each processor is independent from the others with its own L1 cache. They
might share the L2 cache though. As long as there are enough independent tasks to feed
each processor, the computing power of a chip is then a linear function of the number of
processors.
However, the multi-core solution duplicates a large number of functional units
that are continuously dissipating heat. If a processor does not use all of its functional
units at every cycle, that energy is wasted. A solution is to use Simultaneous Multi-
Threading (SMT) [ACC+90, TEL95, TEE+96, CWT+01]. Then several processors share
a pool of functional units. An extra hardware arbiter is in charge of fairly distributing the
instructions of each processor over the available functional units. It is the current solution
used by Intel for the Pentium processor family.
A bigger architectural leap is made with cellular architectures [CCC+02,
ACC+03]. A single chip is composed of one hundred or more thread units. Each thread
unit is a simplified processor with a very limited number of functional units. All the thread
units have access to on-chip shared memory and are interconnected by a network. The
ILP paradigm then shifts to Thread-Level Parallelism (TLP). Such architectures present
several advantages. They consume much less power than the multi-core or SMT archi-
tectures. The heat is evenly distributed through the entire chip. Computing performance
comes from the large number of thread units, not from the processing power of few pro-
cessors. Those chips are also easy and therefore cheaper to manufacture. If few thread
units or memory units are not functional, the chip itself is still functional. The chip design
is highly modular. The number of thread units may vary depending if more memory is
required for instance.
1.2 Problem Description
Therefore cellular architectures are very similar to the paralleling processors pro-
posed in the 1980’s. The large gap between the processors then and today’s cellular
3

architectures has been filled through smooth and economically sound modifications from
one processor generation to the next.
Unfortunately the programmability issues remain untackled: how to harness so
much computational power? How to program applications that will benefit from so much
parallelism? How to synchronize the threads executing on all the thread units? How to
communicate data from one thread to another in a timely fashion? It is the purpose of this
dissertation to propose a solution to these questions for a group of program structures:
loop nests.
Loop nests are present in almost all applications, especially in the scientific do-
main where they can represent 90% of the total execution time of the application. It is
therefore important to ensure their fast execution on any architecture.
The solution proposed in this dissertation, named Single-dimension Software-
Pipelining (SSP) is a complete compilation framework which generates a fully multi-
threaded schedule to execute any imperfect loop nests on cellular architectures. The orig-
inal source code remains unchanged as if the loop nest was to be executed on a unipro-
cessor. Synchronizations between the threads are automatically handled. The framework
includes several steps. In order those are: loop selection, dependences simplification,
kernel generation, register pressure evaluation, register allocation and code generation.
1.3 Contributions
The traditional and most efficient method to schedule a single loop or the
innermost loop of a loop nest on a single processor machine is called software-
pipelining [Lam88]. Rong’s theoretical preliminary work [Ron01] describes the foun-
dation for extending software-pipelining to perfect loop nests on an ideal uniprocessor
architecture. It is the starting point of this work.
The following original contributions are primarily the work of the author:
4
1. The definition and refinement of the level separation constraint for the schedule
functions into the innermost level separation constraint.
2. The design, construction and evaluation of several scheduling methods to generate
the kernel of operations on which an SSP schedule is based.
3. The formulation of an inexpensive but accurate method to evaluate the register pres-
sure of an SSP schedule in order to detect as early as possible infeasible schedules.
4. The specification and evaluation of the code generation scheme for SSP schedules
on cellular architectures with limited dedicated hardware support (rotating regis-
ters).
5. The design of a multi-threaded SSP scheduling solution on cellular architectures.
The solution automatically generates a synchronized software-pipelining schedule
to be executed on a given number of thread units.
The following original contributions are the joint work of the author and Dr. Rong :
5. The formulation of the theoretical schedule functions for perfect and imperfect loop
nests and their properties. The author played a major role in proving the correctness
of those functions.
6. The definition and implementation of heuristics to detect the most profitable loop
level to software pipeline within a loop nest.
7. The specification and evaluation of the code generation scheme for SSP schedules
on VLIW architectures with dedicated hardware support such as rotating registers,
predication, and loop counters.
8. The definition and evaluation of a normalized and complete representation of life-
times in a SSP schedule and a method to use the representation to allocate a mini-
mum of registers to the loop variants of the schedule.
5

1.4 Synopsis
This dissertation is organized as follows:
• The next chapter explains in detail the two target architectures used for the work in
this dissertation. The VLIW architecture is the Itanium architecture, which offers
hardware support for loop execution such as rotating registers, predication and loop
counters. Their usage and the related assembly instructions are detailed there. The
cellular architecture is the IBM 64-bit Cyclops architecture. It features a hundred
thread units and shared memory blocks on a single chip and interconnected by a
cross-bar network. Some useful definitions are also presented.
• Chapter 3 describes the Single-dimension Software-Pipelining (SSP) theory. The
compilation framework is also introduced, followed by the theoretical scheduling
functions. The correctness proofs for perfect and imperfect loop nests and the prop-
erties of SSP schedules are also present. The evaluation of the SSP schedules as
opposed to other loop scheduling methods are shown there.
• Chapter 4 presents two different heuristics to evaluate the most profitable loop level
in a loop nest. That level will be chosen to software-pipeline the loop nest. The first
heuristic is based on resource usage and dependences while the second considers
cache reuse potential.
• Chapter 5 introduces three different methods to generate the one-dimensional SSP
schedule: the kernel. The first method schedules the loop levels one after the other
starting from the innermost. The second schedules all the operations from all the
loop levels simultaneously. The third is an hybrid approach which tries to merge the
advantages of the two other methods. At the end the three methods are evaluated
over a set of benchmarks.
• Chapter 6 shows a fast and accurate solution scheme to evaluate the final register
pressure of the entire SSP schedule by only considering its kernel. If the register
6
pressure is too high, another kernel must be found. The speed and correctness of
the method are also evaluated there.
• Chapter 7 presents the normalized representation of the lifetimes of loop variants
in SSP schedules. This representation is then used to find a register allocation
solution that accommodates all the loop variants of the schedule while minimizing
the register usage. The efficiency of the representation and of the register allocation
solution are tested over a large set of benchmarks. The impact of a solution that
uses no more registers than available is also shown.
• Chapter 8 shows the code generation scheme used for VLIW architectures with
dedicated loop execution hardware support such as register rotation, predication
and loop counter. The method presented shows how to deal with a lack of a multiple
level rotating register file.
• Chapter 9 details the code generation scheme for a single thread unit on cellular
architectures like the IBM 64-bit Cyclops architecture. Then the scheme is extended
to use all the thread units available. The synchronization issues are also handled.
Experimental speedup curves are presented.
• Chapter 10 concludes this dissertation and presents some future work directions.
7

Chapter 2
BACKGROUND
2.1 Software-Pipelining
Because of their repetitive nature, loops represent the most significant part of the
total execution time of programs. Naturally, numerous optimizations, transformations and
scheduling methods have been proposed to reduce the execution time of loops, and soft-
ware pipelining (SWP) is probably the main scheduling method. When applicable, SWP
can be considered as the most powerful scheduling technique for single loops. For a small
cost in code size, SWP makes usage of the machine resources and available instruction-
level parallelism by overlapping the execution of two or more consecutive iterations of
the same loop.
2.1.1 Overview
Typically, without SWP, consecutive iterations of a loop are scheduled one after
the other. Iteration i+1 will start only once iteration i has terminated. Instructions within
a single iteration are scheduled using an instruction scheduler appropriate for the target ar-
chitecture such as list scheduling [Hu61], hyperblock scheduling [MLC+92], superblock
scheduling [WMC+93].
For instance, let us consider the loop example in Figure 2.1 that computes the sum
of the elements of one array and the product of the elements of a second array. Each
operation is assumed to have a latency of 1 cycle and both arrays have a size of N. On any
pipelined non-superscalar architecture and without SWP, the loop is computed as-is using
8
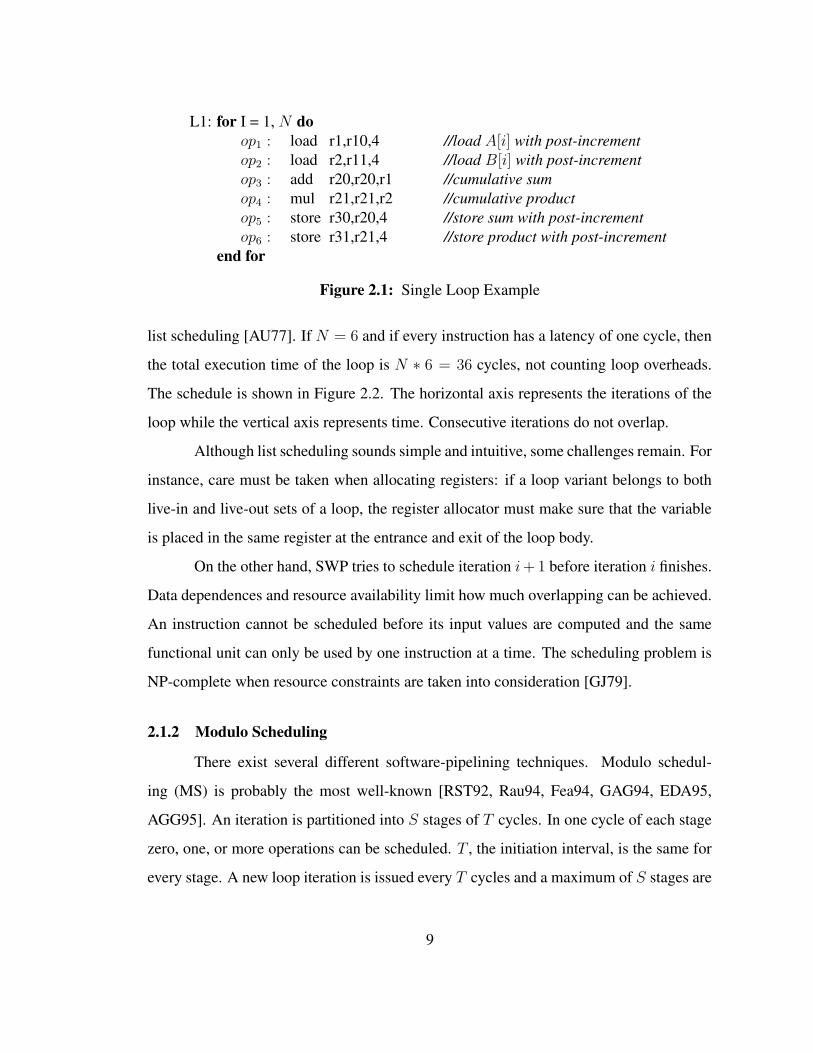
L1: for I = 1, N doop1 : load r1,r10,4 //load A[i] with post-incrementop2 : load r2,r11,4 //load B[i] with post-incrementop3 : add r20,r20,r1 //cumulative sumop4 : mul r21,r21,r2 //cumulative productop5 : store r30,r20,4 //store sum with post-incrementop6 : store r31,r21,4 //store product with post-increment
end for
Figure 2.1: Single Loop Example
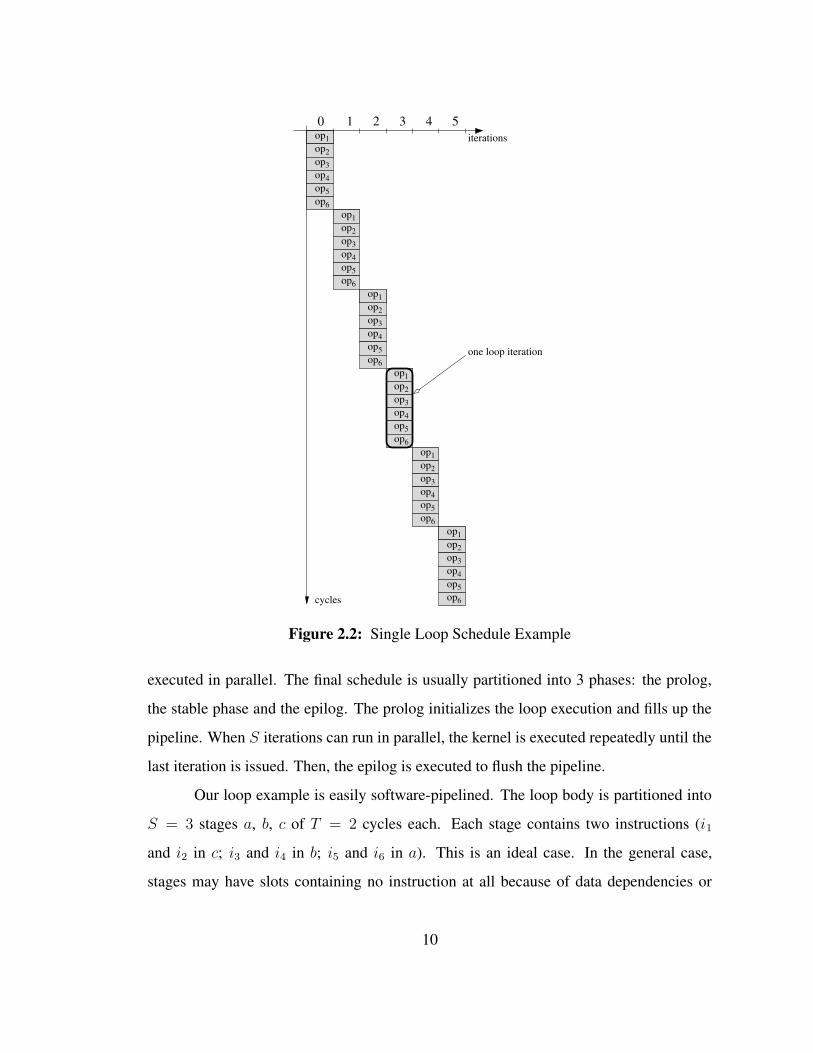
list scheduling [AU77]. If N = 6 and if every instruction has a latency of one cycle, then
the total execution time of the loop is N ∗ 6 = 36 cycles, not counting loop overheads.
The schedule is shown in Figure 2.2. The horizontal axis represents the iterations of the
loop while the vertical axis represents time. Consecutive iterations do not overlap.
Although list scheduling sounds simple and intuitive, some challenges remain. For
instance, care must be taken when allocating registers: if a loop variant belongs to both
live-in and live-out sets of a loop, the register allocator must make sure that the variable
is placed in the same register at the entrance and exit of the loop body.
On the other hand, SWP tries to schedule iteration i+ 1 before iteration i finishes.
Data dependences and resource availability limit how much overlapping can be achieved.
An instruction cannot be scheduled before its input values are computed and the same
functional unit can only be used by one instruction at a time. The scheduling problem is
NP-complete when resource constraints are taken into consideration [GJ79].
2.1.2 Modulo Scheduling
There exist several different software-pipelining techniques. Modulo schedul-
ing (MS) is probably the most well-known [RST92, Rau94, Fea94, GAG94, EDA95,
AGG95]. An iteration is partitioned into S stages of T cycles. In one cycle of each stage
zero, one, or more operations can be scheduled. T , the initiation interval, is the same for
every stage. A new loop iteration is issued every T cycles and a maximum of S stages are
9
cycles
op1op2op3op4op5op6
op1op2op3op4op5op6
op1op2op3op4op5op6
op1op2op3op4op5op6
op1op2op3op4op5op6
op1op2op3op4op5op6
543210
one loop iteration
iterations
Figure 2.2: Single Loop Schedule Example
executed in parallel. The final schedule is usually partitioned into 3 phases: the prolog,
the stable phase and the epilog. The prolog initializes the loop execution and fills up the
pipeline. When S iterations can run in parallel, the kernel is executed repeatedly until the
last iteration is issued. Then, the epilog is executed to flush the pipeline.
Our loop example is easily software-pipelined. The loop body is partitioned into
S = 3 stages a, b, c of T = 2 cycles each. Each stage contains two instructions (i1
and i2 in c; i3 and i4 in b; i5 and i6 in a). This is an ideal case. In the general case,
stages may have slots containing no instruction at all because of data dependencies or
10

op1op2
op3op4
op5op6
abc
T=2
S=3
(a) MS kernel
c
b
a
c
b
a
c
b
a
c
b
a
c
b
a
c
b
a
543210
kernel
cycles
prolog
stable phase
epilog
(b) MS Schedule
Figure 2.3: Single Loop MS Schedule Example
hardware constraints. The prolog, kernel and epilog are shown on Figure 2.3. The kernel
is executed four times. A new iteration is issued every T cycles. Thanks to the overlapping
of consecutive iterations, the total execution time of the same loop is now 16 cycles.
There exist several modulo-scheduling techniques that can be separated into
two categories: optimal and heuristic-based. Optimal modulo-scheduling techniques
[AG86, EDA95, GAG94, NG93, RGSL96] are necessary for evaluation purposes but their
high computation time due to the NP-completeness of the scheduling problem makes
their implementation in a production compiler impractical. Among the heuristic-based
techniques, the most relevant methods are: Iterative Modulo-Scheduling [Rau94], Slack
11

Modulo-Scheduling [Huf93], Swing Modulo-Scheduling [LGAV96], Selective Schedul-
ing [ME97] and Integrated Register-Sensitive Iterative Software-Pipelining [DRG98].
For more information about other modulo-scheduling techniques and their relative per-
formance, the reader is referred to [CLG02].
Iterative Modulo-Scheduling [Rau94] sorts operations by height in the data de-
pendency graph and inserts them iteratively into the partial schedule. If a conflict occurs,
then the algorithm backtracks, removes already scheduled operations and reschedules
them in other time slots. The method does not take register assignment into considera-
tion. Integrated Register-Sensitive Iterative Software-Pipelining [DRG98] is an optimized
version of the Iterative Modulo-Scheduling technique that takes into account register pres-
sure.
Slack Modulo-Scheduling [Huf93] sorts operations by slack. The slack of an
operation is the distance between the earliest possible schedule time and the latest possi-
ble schedule time of the operation. An operation on the critical path in the data depen-
dency graph will have a higher priority than an operation on another path. Like Iterative
Modulo-Scheduling, if it is not feasible to schedule the current operation, backtracking
occurs. Because the lifetimes of the loop variants are considered in the process, register
requirements are reduced.
Swing Modulo-Scheduling [LGAV96] does not use backtracking but relies on a
more advanced sorting techniques based on the criticality and recurrence cycle length of
the path to which they belong. The ordering of the nodes also helps to reduce register
requirement. Because this method does not iterate, it is comparably faster than the other
methods.
Selective Scheduling [ME97] is targeted for VLIW processors. The SWP kernel
is a single VLIW instruction word. The instruction starts empty and is filled up with
instructions using global scheduling techniques based on speculative code motion and
target register renaming. The operations that are not scheduled in the kernel are sorted
12
in the prolog and epilog. The technique automatically handles branches within the loop
using speculation and variable initiation intervals.
2.1.3 Clustered-VLIW Software-Pipelining
Clustered-VLIW architectures are very common in the embedded processor world.
In order to compensate for the stagnating wire delays in the faster processors, chip re-
sources such as registers, functional units and memory ports are partitioned into clusters.
Clusters can communicate with each other using a memory bus or a register bus. The
architecture uses VLIW (Very-Long Instruction Word) instruction format. Consequently,
all functional units, even across clusters, share the same clock cycle and advance in a
lock-step mechanism. If one functional unit executes a long-latency operation, all the
other functional units must wait for the operation to be completed, even if their own op-
erations have already been completed.
There exist several methods to software pipeline single loops on such architec-
tures. Fernandes et Al [FLT99] perform both scheduling and partitioning in a single step
on a clustered VLIW architecture with queues to communicate between clusters. Nystrom
and Eichenberger [NE98] proposed an iterative two-step algorithm where scheduling and
partitioning are performed in two separate steps. If no feasible schedule can be found, the
initiation interval is increased. Their method does not seem to scale well when the register
buses become saturated [SG00a]. Sanchez and Gonzales [SG00a, SG00b] proposed an
iterative unified approach that performs scheduling and partitioning in one single step and
tries to minimize inter-cluster communications.
2.2 The Intel Itanium architecture
The Itanium architecture was developed with two ideas in mind: to expose the
instruction-level parallelism of any given program to the compiler and to increase the
number of executed instructions per cycle for server applications (e.g. data-base servers
13
and web servers) [HMR+00]. The choices were made based on academic and indus-
trial research concerning the EPIC (Explicitly Parallel Instruction Computing) architec-
ture [CNO+88, RYYT89, MCmWH+92, GCM+94].
To increase the instruction throughput, a flexible VLIW instruction style is used.
In each cycle an implementation-dependent number of bundles of three instructions each
are fetched. The data size is set to 64 bits as opposed to the current 32-bit machines.
Larger data size means more information computed each cycle and more addressable
memory.
2.2.1 Features
To expose instruction-level parallelism to the compiler, a number of instructions
and hardware support were included in the design [Int01]:
• Predication: Instructions can be predicated so that if-conversion can be performed.
Thanks to if-conversion [AKPW83, DHB89], control dependencies are transformed
into data dependencies, transforming basic blocks into larger hyperblocks and ex-
posing more instruction-level parallelism to the compiler.
• Data Speculation: Load addresses can be speculated to schedule a load as early as
possible, even before the address is known. If an error is made in speculation, some
recovery code is executed.
• Control Speculation: Control speculation allows loads and stores to be executed
before the branch instruction that dominates them. Check instructions are inserted
to recover in case of failed speculation.
• Large register file: A large register file is provided to limit register spills and re-
stores. Spills and restores are load and store instructions that save and restore reg-
ister values to and from the memory when there are not enough registers available
to hold all the values the program is using.
14

• Software-pipelining support: Traditional software-pipelining is highly supported
with the presence of architectural features: loop counter registers, predication, ro-
tating registers, and large register files. All these features increase the range of loops
that can be software-pipelined and eliminate most of the loop control overheads.
For a better understanding and because SSP will be using some of the Itanium
features for its implementation, the example of a single loop is used here. We assume that
the loop body is a single large basic block. The loop body is software-pipelined. Only the
code for the stages of the kernel need to be generated. Let us consider the code from the
Itanium manual [Int01] shown in Figure 2.4.
Two loop counters are used. The lc register is the main loop counter of the loop.
The ec register is the epilog counter. When all the loop iterations have been issued (but
not yet fully executed) and it is time to flush the pipeline, the epilog counter is used to
count how many extra iterations the loop should be executed. The ec value only decre-
ments once the lc value reaches zero. Both counters are decremented when a new loop
iteration is issued using a special branch instruction: br.ctop. The instruction branches,
decrements the loop counters and rotates the rotating registers all in one cycle.
Each stage (and all the instructions in it) is guarded by a predicate register, starting
from p16. The predicate registers rotate when the br.ctop instruction is executed. When
the predicate registers rotate, the value in the predicate register i is copied into the predi-
cate register i+1. As long as lc > 0, p16 is set to 1 during the register rotation. Otherwise
p16 is set to 0. Rotating predicate registers are a very convenient way to fill, run, and flush
the pipeline with a single instance of the kernel instructions.
General-purpose registers above 32 rotate. Therefore, the value stored in r32 after
the load will be in r34 “two executions of br.ctop later” for the add instruction to use.
Rotating registers avoid manual copies of registers that would potentially slow down the
loop execution. The SSP algorithm will make use of all of these features but in a different
manner as described in Section 8.
15

L1: for I = 0, N − 1 dold4 r4=[r5],4;; //load with post-incrementadd r7=r4,r7;; //add cumulative sumst4 [r6]=r7,4;; //store sum with post-increment
end for
(a) Before Software-Pipelining
mov lc=N-1 //LC = loop count - 1mov ec=4 //EC = epilog stages - 1mov pr.rot=1<<16 //p16 = 1, others = 0
L1: (p16) ld4 r32=[r5],4(p18) add r35=r34,r9(p19) st4 [r6]=r36,4
br.ctop L1;;
(b) After Software-Pipelining
ld4
add
st4
ld4
add
st4
ld4
add
ld4
ld4
ld4addst4
st4 add
addst4
st4
Register Values
iterations
0 1 2 3 4 N−1N−2N−3
cycles
LC1
1
1
1 1 1 1
11
1
1
1
1
1
0 0
0
0
0
0
0
0
0
0
0
1 1 1 1
111
1 1
1
3
4
2
1
0 0 0 0 00
0
0
0
0
4
4
4
4
4
0
ECp19p18p17p16
N−2
N−3
N−4
N−5
N−1
(c) Software-Pipelined Schedule
Figure 2.4: Software-Pipelining for the Itanium Architecture
16

2.2.2 Experimental Framework
The Itanium architecture is one of the two target architectures used to collect ex-
perimental data about the SSP method. The SSP framework is implemented in the Open64
compiler [Ope03]. The Open64 compiler is a open-source research compiler using the
GNU Compiler front-ends for C, C++ and Fortran. Originally developed by SGI for its
MIPS processors, it has been retargeted for the Intel Itanium architecture. It includes
several optimizations at every level of the compilation process with profiling support if
necessary.
Open64 uses the Winning Hierarchical Intermediate Representation Language, or
WHIRL, as the representation for all the optimizations. WHIRL uses 5 different levels
of representation from source code level to assembly level. They are named: Very High
(VH), High (H). Middle (M), Low (L) and Very Low (VL). The lower the representation
is, the more details are available for the optimizations. Very high level optimizations
such as inlining are run at the Very High level. At the High level, several optimizations
are performed: Interprocedural Analysis including cloning, inlining, dead function and
variable elimination, and constant propagation; Architecture-independent optimizations
(PreOPT); and Loop Nest Optimizations (LNO), including loop fission, loop fusion, loop
tiling, loop peeling, unroll-and-jam, loop interchange and vector data prefetching. Global
scalar Static-Single Assignment (SSA) optimizations (WOPT) are then used at the Middle
level. Register Variable Identification (RVI) is run both at the Middle and Low levels.
Architecture-dependent optimizations are finally applied at the Low and Very Low levels.
Most of the SSP algorithms are applied at the Very Low level during the code
generation (CG) phase that includes hyperblock formation, global and local scheduling,
global and local register allocation, control-flow optimizations, software-pipelining and
code emission. The data dependence graph analysis steps take place during the LNO
phase at the High representation level. The implementation of SSP within Open64 is
shown in Figure 2.5.
17

GNU Front−EndC/C++/Fortran
Binary Code
Source Code
PreOPT
WOPT
CGVery Low
Low
Middle
High
Very High
WHIRL Levels SSP Framework
Loop Nest
Itanium Code Cyclops64 Code
Dependence Analysis
1−D DDG Loop Level
SSP Kernel
SSP Kernel
SSP KernelRegister−Allocated
Loop Selection
Register Pressure Evaluation
Register Allocation
EPIC MTC
Code Generation
Modulo Scheduling
VHO
IPA
RVI
LNO
Figure 2.5: SSP Implementation in Open64
18

The final schedule in Itanium assembly code is assembled and linked using GNU
tools [gcc03] and is run on an Itanium machine with an Itanium 2 processor running at
1.4GHz equipped with 32KB/256KB/1.5MB of L1/L2/L3 caches and 1GB RAM. The
machine was set to single-user mode to reduce noise in the collected timing results. Also
each experiment was averaged over 3 runs. The measured parameters were execution
time, cache misses, code size, and code density. Correctness was tested against the Ita-
nium GCC compiler.
2.3 The IBM 64-bit Cyclops Architecture
2.3.1 Generic Cellular Architectures
In the past decade, the trend for microprocessor design has been largely driven by
clock speed [BG97, BG04]. The need for faster processors led to deeper pipelines, larger
multi-level on-chip caches, sophisticated branch predictors, register renaming techniques,
speculative execution, etc. However, technology is reaching a point of diminishing re-
turn. Longer and longer memory latencies, increasing wire delays, power consumption,
design complexity and the impossibility to deepen pipelines even further forced computer
architects to look at other directions for improvement. Moreover, although predication
[AKPW83, DHB89] and speculation [CR00] increase processor utilization, the amount
of useful work is still limited.
A counter-approach is to have more than one processor core on a single chip,
but featuring less resources such as functional units: thread-level parallelism replaces
instruction-level parallelism. When pushed to the extreme, this principle leads to a new
type of computer architecture: Multi-Threaded Cellular (MTC) Architecture [CCC+02].
In an MTC architecture, a processor or, more exactly, a thread unit is reduced to a strict
minimum: a program counter, an all-purpose pipelined functional unit and a register file.
There is no scoreboarding, branch predictor or any hardware optimizations implemented.
As for the cache, several memory banks are used. A single cache with several ports
19

would be too expensive to implement and very inefficient as well. Memory banks and
thread units are then connected by a network as shown in Figure 2.6.
PC ALU
RF
PC ALU
RF
...
...
NETWORK
MEM MEM
OFF−C
HIP M
EM
OR
Y
Figure 2.6: Generic Cellular Architecture Example
The are multiple advantages of such an architecture:
• First, from a power consumption point of view, energy is better utilized. Instead of
using large amount of power into hardware optimizations such as branch prediction
to speed up the execution of single thread, that energy is used to execute many
more threads. At the end, the amount of work done for a given amount of energy is
higher [LM05]. Moreover, the use of several thread units spread on the silicon chip
also eases the heat dissipation.
• From a manufacturing point of view, the chip is less expensive to produce. If one
thread unit or memory bank has a defect, the chip is still fully functional. Therefore
there is little silicon waffle waste.
• From a designer point of view, the chip is highly modular. Therefore it is easier to
design, develop and debug. Any subsequent upgrades are less costly.
20

• From a compiler point of view, simple hardware means better understanding of the
processor and therefore better optimization algorithms. The compiler should be
able to more easily harness the performance power of the processor.
• From a financial point of view, the entire design and manufacturing of the chip and
associated development tools, including compilers or operating systems, are sim-
plified resulting in a less expensive computer system. Smaller power consumption
is also deducted from the total bill.
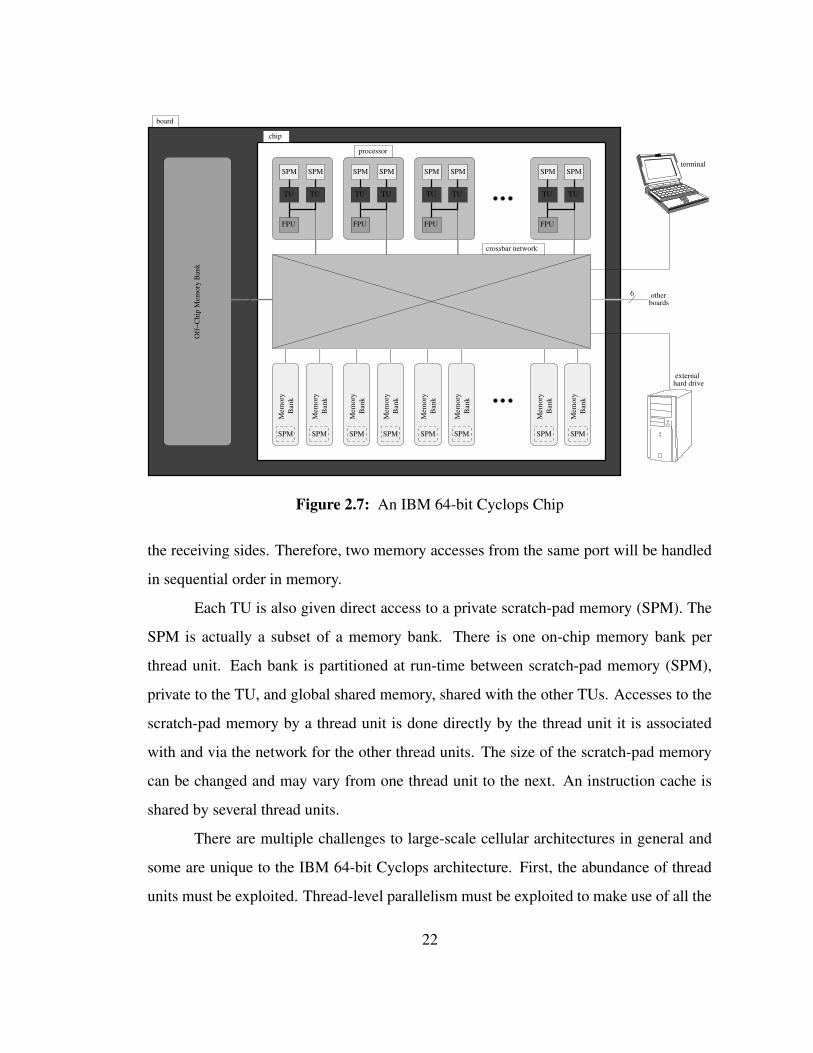
2.3.2 The IBM 64-bit Cyclops Architecture
One instance of an MTC architecture that was used in this dissertation is the IBM
64-bit Cyclops chip [CCC+02, ACC+03, AAC+03], shown in Figure 2.7. The Cyclops
project was originally part of the IBM BlueGene project [IBM03]. The goal is to design
an affordable supercomputer with 1 Teraflop capability. The supercomputer is composed
of several nodes organized in racks and linked together by a 3D-mesh network.
Each node may contain several 64-bit Cyclops chips. A single chip contains 160
thread units and as many memory banks interconnected together with a crossbar network.
Also connected to the network are off-chip memory banks, 6 outer-network connections
for the 3D-mesh network between chips, 1 local SATA hard drive and 1 control channel
for human intervention.
A thread unit is composed of a functional unit for memory, branch and integer
arithmetic operations, a floating-point unit, a private register file, a program counter. For
the purpose of this study, the register file is assumed to be rotating. The floating-point
unit is shared between two thread units. The two thread units and the floating-point unit
forms a processor. Each processor is connected to the crossbar network with a single port.
Access to the crossbar is handled in First-In First-Out (FIFO) order on the sender side.
Data is transferred from the sending port to the receiving port only after the transfer can be
guaranteed free of contention. Memory reads and writes are then handled atomically on
21
chip
board
Off
−Chi
p M
emor
y B
ank
Ban
kM
emor
y
Ban
kM
emor
y
Ban
kM
emor
y
Ban
kM
emor
y
Ban
kM
emor
y
Ban
kM
emor
y
Ban
kM
emor
y
Ban
kM
emor
y
TU TU
FPU
SPM SPM
TU TU
FPU
SPM SPM
TU TU
FPU
SPM SPM
TU TU
FPU
SPM SPM
processor
crossbar network
boardsother6
terminal
hard driveexternal
SPMSPM SPM SPM SPM SPM SPMSPM
Figure 2.7: An IBM 64-bit Cyclops Chip
the receiving sides. Therefore, two memory accesses from the same port will be handled
in sequential order in memory.
Each TU is also given direct access to a private scratch-pad memory (SPM). The
SPM is actually a subset of a memory bank. There is one on-chip memory bank per
thread unit. Each bank is partitioned at run-time between scratch-pad memory (SPM),
private to the TU, and global shared memory, shared with the other TUs. Accesses to the
scratch-pad memory by a thread unit is done directly by the thread unit it is associated
with and via the network for the other thread units. The size of the scratch-pad memory
can be changed and may vary from one thread unit to the next. An instruction cache is
shared by several thread units.
There are multiple challenges to large-scale cellular architectures in general and
some are unique to the IBM 64-bit Cyclops architecture. First, the abundance of thread
units must be exploited. Thread-level parallelism must be exploited to make use of all the
22
available resources. Second, the workload must be distributed fairly among all the thread
units to avoid execution bottleneck and increase processor utilization. Third, the thread
units must synchronize with each other without impending the flow of execution. High
synchronization costs would result in loss of performance.
2.3.3 Experimental Framework
The IBM 64-bit Cyclops architecture is the target architecture to collect experi-
mental results about multi-threaded SSP schedules. Similarly to the Itanium architecture,
MT-SSP was implemented into the Open64 compiler which has been retargeted to the
IBM 64-bit Cyclops architecture. The standard GNU utilities, such as assembler and
linker, were then used to produce the final binary file. Again, GCC was used to test the
correctness of the output.
Because the IBM 64-bit Cyclops is still in its development phase, no processor is
available for testing. Instead the benchmarks were run on the simulator [dCZHG05] used
by the IBM 64-bit Cyclops hardware and software development teams. The simulator
was written from the ground up and supports multi-chip multi-threaded execution. It
is functionally-accurate and models the instruction cache, the memory banks, the FIFO
queues and the crossbar network.
23

Chapter 3
SINGLE-DIMENSION SOFTWARE PIPELINING
This chapter presents the Single-dimension Software Pipelining technique, or SSP
for short. An early theoretical work for perfect loop nests on an ideal architecture was
originally proposed by Rong in his Ph.D. dissertation [Ron01]. This chapter extends the
work to imperfect loop nests and proves the correctness of the scheduling functions. The
next chapters show how to apply SSP to real-life architectures. SSP is a methodology to
software pipeline loop nests at an arbitrary level, unlike modulo scheduling which focuses
on the innermost loop only. This chapter presents the method from a theoretical point of
view. It is meant both as an introduction to SSP and as a reference and basis for the next
chapters.
The next sections explain how SSP simplifies the multi-dimensional problem of
scheduling loop nests into a uni-dimensional problem, the solution of which is used to
generate the final multi-dimensional schedule. Section 3.1 gives an overview of the SSP
method. Section 3.2 presents a detailed overview of the SSP theory. The next section
explains how the SSP methodology is actually implemented in practice. To help the
reader, full examples will be presented in Section 3.4. The scheduling constraints used
for the scheduler are explained in Section 3.5 and Section 3.6 presents the final schedule
function for the operations of the loop nests. Section 3.7 will then present some numbers
showing the usefulness of the method.
24

3.1 Problem Description
3.1.1 Motivation
From the perspective of improving programs total execution time, several ap-
proaches are possible. With the advent of VLIW and EPIC architectures, exploiting
instruction-level parallelism (ILP) in programs helps improving the overall performance
of applications. For instance, processors such as Intel Itanium [Int01] offer wider and
wider hardware resources to do just that. Moreover loop nests in scientific applications
represent a significant ratio of the total execution time and intrinsically have a high degree
of instruction-level parallelism. Therefore, it is important to carefully design loop nest
scheduling methods that can efficiently extract the ILP present in the multi-dimensional
iteration space of loop nests and expose it to the target architecture.
The main method to extract ILP from loop nests is probably software pipelin-
ing (SWP) [Woo79, Lam88]. SWP schedules the iterations of a loop in paral-
lel while respecting data dependences. Each iteration starts before the previous one
has terminated as in a pipeline, hence the terminology. However, most implementa-
tions [AN88a, AN88b, AN91, AG86, DRG98, Huf93, LGAV96, NG93, ASR95, Cha81,
ME92, EN90, Jai91, RA93, RG81, RST92, Rau94, Fea94, GAG94, EDA95, AGG95],
including the most popular modulo-scheduling (MS), only consider single loops or the in-
nermost loop of a loop nest. Even if loop nest transformations are applied before schedul-
ing the loop nests, the amount of ILP to be extracted is limited to the innermost level.
Also, the data reuse potential in the outer loops cannot be exploited [CK94, CDS96]
There exist several other methods to software pipelining the entire loop nest, but
they all have their drawbacks. Hierarchical scheduling [Lam88, ME97] software pipelines
each loop level separately, starting from the innermost, and considering each one as an
atomic operation for the corresponding enclosing loop. Although attractive by its simplic-
ity, the technique suffers from strong scheduling constraints and gives too much priority
to the innermost loops. Decisions made in the innermost levels are fixed and may hinder
25

the ILP of the loop nest. In [MD01, WG96], the prolog and epilog of the innermost loop
are overlapped. Unfortunately the method can only be used for the innermost level. Loop
nest linear scheduling [DSRV99, DSRV02] was also proposed to schedule operations of a
loop nests using linear functions. However the method does not seem to take into account
hardware constraints such as register files. SSP is the only method to software pipeline a
loop nest while taking into account hardware resources.
Moreover, SSP offers several advantages. First, it is a loop nest scheduling method
which can be seen as a natural generalization of MS to multi-dimensional loops [Ron01,
RTG+03, RTG+04]. SSP retains its simplicity and, when applied to a single loop or to the
innermost loop of a loop nest, SSP is in fact equivalent to MS. Therefore SSP schedules
are at least as good as MS schedules. However, SSP is more flexible and can schedule
other loop levels when judged profitable. Examples in Section 3.4 show how SSP can
outperform MS.
3.1.2 Problem Statement
The problem that the single-dimension software pipelining method addresses can
be formally formulated as follows: Given a loop nest made of n loops L1,. . .,Ln, identify
the most profitable loop Li and software pipeline it. If loop Li is selected and software
pipelined, then its iterations will be executed in parallel. However, the iterations of the
loops Lj enclosed within Li (j > i) will run sequentially within each iteration of Li. The
loops Lk enclosing Li (k < i) are not software pipelined and remain intact. Therefore,
for clarity reasons, we will always ignore the enclosing loops L1, ..., Li−1 and, without
loss of generality, consider the selected loop as the outermost loop level in the loop nest.
In the rest of the dissertation, n will always designate the depth of the loop nest and Li
the loop at level i with n being the deepest level. The number of iterations for each loop
Li will be noted Ni.
Despite the general formulation, SSP currently targets any imperfect loop nests
that fulfills the following criteria. First, there must be no negative dependences at the
26
selected level. Otherwise, no overlapping between iterations is possible. Second, the
loop nests cannot include loop siblings. The loop nests can be imperfect, but may only
include one loop per level. Those loop nests are also called Singly-Nested Loop Nests
(SNLN) [WMC98]. This limitation is not a theoretical but a practical one. The removal
of this constraint is left to future work.
To software pipeline a loop nest, the SSP method must address several issues and
answer some questions: how to define the profitability of a loop level and how to measure
it? How to handle the multi-dimensional dependences of the loop nest? How to take into
account the limited hardware resources of the processor such as registers and functional
units? How to generate a repetitive schedule? How to manage the loop overheads such
as loop counters and branch instructions? Those questions will be answered as the SSP
implementation is explained in the next chapters. The next section gives an overview of
the methodology used.
3.2 SSP Theory
To schedule loop nests, SSP proceeds in four steps shown in Figure 3.1. First,
the loop to software pipeline in the loop nest is selected. The multi-dimensional data
dependence graph (n-D DDG) is then simplified into the one-dimensional data depen-
dence graph (1-D DDG) of the selected loop level. The computed graph is then used to
schedule the operations of the loop nests from the selected loop level and deeper. The
obtained schedule is named the one-dimensional schedule (1-D schedule) of the loop nest
and corresponds to the execution of a single iteration of the selected loop. The hardware
constraints are then taken into consideration to allow the overlapped execution of the other
iterations of the selected level and the final schedule is generated. Each step is described
with more details in the next sections.
27
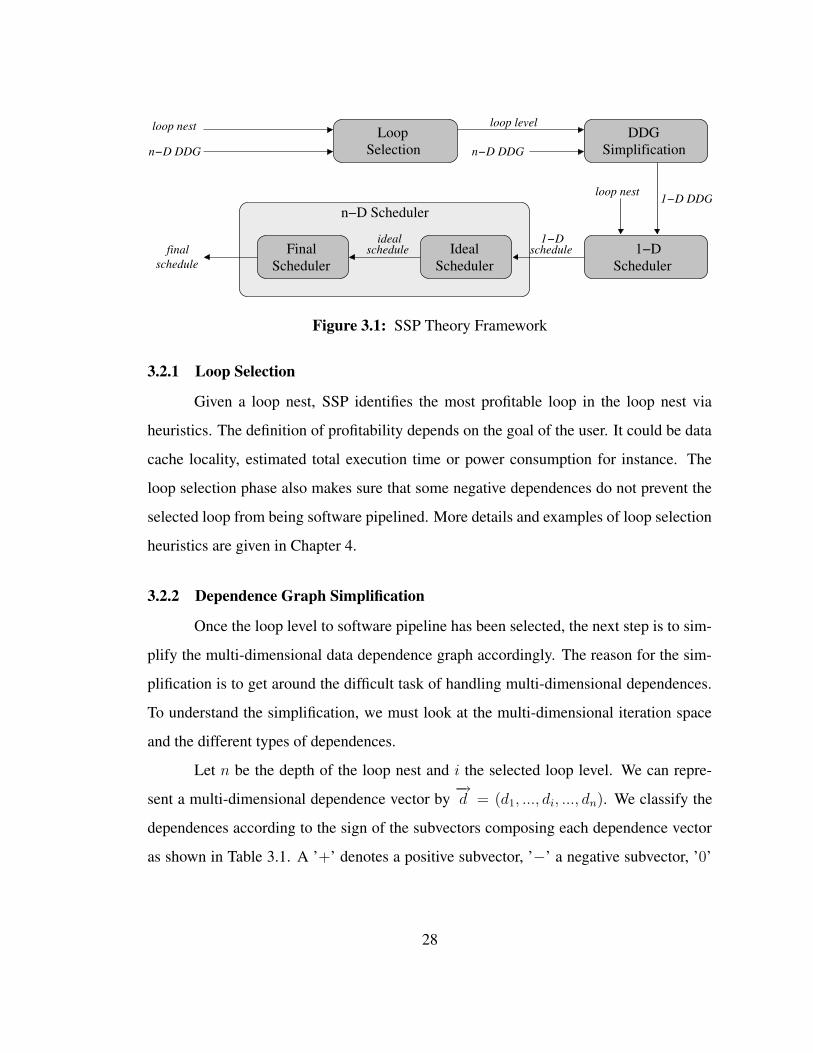
loop nest1−D DDG
n−D DDG
loop nest
finalschedule
scheduleideal
schedule1−D
n−D DDG
loop level
n−D Scheduler
SimplificationDDG
1−DScheduler
IdealScheduler
FinalScheduler
SelectionLoop
Figure 3.1: SSP Theory Framework
3.2.1 Loop Selection
Given a loop nest, SSP identifies the most profitable loop in the loop nest via
heuristics. The definition of profitability depends on the goal of the user. It could be data
cache locality, estimated total execution time or power consumption for instance. The
loop selection phase also makes sure that some negative dependences do not prevent the
selected loop from being software pipelined. More details and examples of loop selection
heuristics are given in Chapter 4.
3.2.2 Dependence Graph Simplification
Once the loop level to software pipeline has been selected, the next step is to sim-
plify the multi-dimensional data dependence graph accordingly. The reason for the sim-
plification is to get around the difficult task of handling multi-dimensional dependences.
To understand the simplification, we must look at the multi-dimensional iteration space
and the different types of dependences.
Let n be the depth of the loop nest and i the selected loop level. We can repre-
sent a multi-dimensional dependence vector by−→d = (d1, ..., di, ..., dn). We classify the
dependences according to the sign of the subvectors composing each dependence vector
as shown in Table 3.1. A ’+’ denotes a positive subvector, ’−’ a negative subvector, ’0’
28

Denomination (d1, . . . , di−1) di (di+1, . . . , dn) Statusouter + or − ∗ ∗ ignoreimpossible 0 − ∗ errornegative 0 0 or + − errorpositive 0 0 or + + ignorezero 0 0 or + 0 consider
Table 3.1: Classification of the Multi-Dimensional Dependences
a null subvector, and ’∗’ a subvector of any sign. Each type of dependence is explained
below.
Outer dependences correspond to dependences between iterations outside the se-
lected loop level. As stated in the problem statement, the loops enclosing the selected
loop level are ignored, and therefore so are the dependences. Impossible dependences,
with di < 0, prevent the loop nest from being scheduled at that level. The loop selection
step should have prevented the situation from happening and therefore those dependences
should not be encountered. The remaining dependences can be sorted into the following
categories.
Negative dependences cannot be handled by the SSP framework and the selected
loop level should have been avoided by the loop selection algorithms. Negative depen-
dences prevent iterations from the loop at level i from being scheduled in parallel. It
currently is a limitation of the SSP method, which could be overcome with some prelimi-
nary loop transformations such as loop skewing followed by loop stripping to conserve a
regular iteration space. We consider those dependences as incorrect at that point and such
an encounter should raise an error.
Positive dependences are correct but can be ignored altogether. Indeed, when pos-
itive dependences are represented in the multi-dimensional iteration space as in the two-
dimensional example in Figure 3.2, we observe that those dependences occur between
two different slices. However, by definition, iterations from the selected loop level (i1)
29
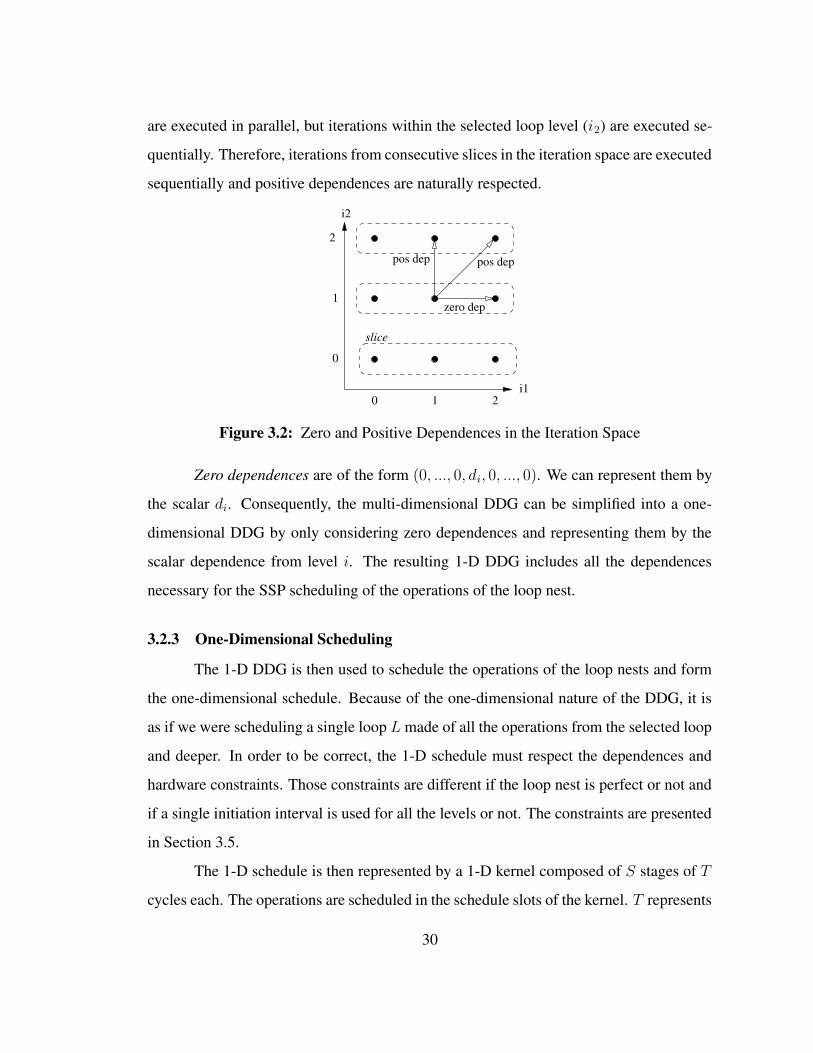
are executed in parallel, but iterations within the selected loop level (i2) are executed se-
quentially. Therefore, iterations from consecutive slices in the iteration space are executed
sequentially and positive dependences are naturally respected.
0 1 2
0
1
2
i2
i1
pos deppos dep
zero dep
slice
Figure 3.2: Zero and Positive Dependences in the Iteration Space
Zero dependences are of the form (0, ..., 0, di, 0, ..., 0). We can represent them by
the scalar di. Consequently, the multi-dimensional DDG can be simplified into a one-
dimensional DDG by only considering zero dependences and representing them by the
scalar dependence from level i. The resulting 1-D DDG includes all the dependences
necessary for the SSP scheduling of the operations of the loop nest.
3.2.3 One-Dimensional Scheduling
The 1-D DDG is then used to schedule the operations of the loop nests and form
the one-dimensional schedule. Because of the one-dimensional nature of the DDG, it is
as if we were scheduling a single loop L made of all the operations from the selected loop
and deeper. In order to be correct, the 1-D schedule must respect the dependences and
hardware constraints. Those constraints are different if the loop nest is perfect or not and
if a single initiation interval is used for all the levels or not. The constraints are presented
in Section 3.5.
The 1-D schedule is then represented by a 1-D kernel composed of S stages of T
cycles each. The operations are scheduled in the schedule slots of the kernel. T represents
30

L1: for i1 = 0, N1 − 1 doop1
L2: for i2 = 0, N2 − 1 doop2
op3
op4
end forend for
(a) Original Loop Nest
op1c b a
T=2
S1=3
S2=2
op2op3op4
(b) Kernel
Figure 3.3: Kernel Example
the initiation interval of the kernel, i.e. the number of cycles between each issue of a new
outermost iteration. The smaller the initiation interval is, the faster the entire schedule
will execute. Si designates the number of stages corresponding to loop Li. More than
one operation may be scheduled in a schedule slot. Within each row of the kernel, the
operations do not compete for the same hardware resource. Figure 3.3 shows an example
of a kernel for a double loop nest. Examples and more formal definition of the kernel are
presented in Section 3.4.
......
... ...
op1op2op3op4
op1op2op3op4
op1op2op3op4
kernel
i10 1 2 3 4
cycles
Figure 3.4: Kernel in the Final Schedule Example if N2 = 1
Traditionally the kernel corresponds to the steady phase of the software-pipelined
schedule in MS. We extend here the terminology to the SSP method. Intuitively the
31

columns in the kernel corresponds to consecutive outermost iterations and the final sched-
ule should be composed of successive instances of the kernel where a new outermost it-
eration is issued every T cycles. Figure 3.4 shows how the kernel may appear in the final
schedule if N2 = 1. Each column represents the execution of one outermost iteration i1.
If N2 > 1 however, the steady phase of the final schedule is not uniquely composed of
the kernel. For more details, the reader is referred to Section 3.4.
3.2.4 Multi-Dimensional Scheduling
The last step is to compute the final schedule. It is obtained by using the 1-D
schedule as a footprint and taking into account the limited hardware resources of the
target processor. An example is presented in Figure 3.5 using the kernel presented in
Figure 3.3. We assume that there are only 2 functional units available and that N2 = 3
and N1 = 4. Each column represents an outermost iteration. Innermost iterations are
grouped in slices, with a different shade of gray for each innermost iteration index value.
Ideally the final schedule issues a new outermost iteration every T cycles as shown
in Figure 3.5(a). The outermost iterations are executed in parallel, while the inner itera-
tions are executed sequentially within each outermost iteration. However, very quickly,
the number of operations to execute per cycle exceeds the capacity of the target architec-
ture and lead to resource conflicts.
In order to correctly execute the schedule, a delay is added to stall the execution of
some outermost iterations. The delay must allow the schedule to run with the functional
units available in the target processor and make repeating patterns appear to allow for
the compact code emission of the final schedule. In SSP, the delay operation is applied
to groups of Sn outermost iterations, where Sn is the number of stages in the kernel
containing operations from the innermost loop. If more than Sn iterations were to be
included in the same iteration group, then the instances of the same innermost stages
would be executed in parallel. That scenario was not considered while generating the
kernel and therefore could lead to some resource conflicts. In our example, Sn = 2 and
32

op1
op2op3
op4op2op3
op4
op4
op2op3
op1
op2op3
op4op2op3
op4
op4
op2op3
op1
op2op3
op4op2op3
op4
op4
op2op3
op1
op2op3
op4op2op3
op4
op4
op2op3
slice 0
slice 1(i2=1)
(i2=0)
slice 2(i2=2)
0 1 2 3
resource conflicts
T=2
cycles
i1
(a) Ideal Schedule
op1
op2op3
op4op2op3
op4
op4
op2op3
op1
op2op3
op4op2op3
op4
op4
op2op3
op1
op2op3
op4op2op3
op4
op4
op2op3
op1
op2op3
op4op2op3
op4
op4
op2op3
0 1 2 3
delay
cycles
i1
kernel
group 1group 0
(b) Final Schedule
Figure 3.5: Multi-Dimensional Scheduling Example
33

we obtain the conflict-free final schedule shown in Figure 3.5(b). Some repeating patterns
appear, like the full kernel for instance. More details about the patterns and final schedules
are given in Section 3.4.
3.2.5 Properties
SSP schedules have two interesting properties. First, if applied to the innermost
level of a loop nest, SSP is equivalent to MS. Indeed there is then no dependence simplifi-
cation and the scheduler becomes a traditional MS scheduler generating a traditional MS
kernel. Therefore SSP can be seen as the generalization of MS to loop nests. Since the
innermost level can always be selected, the performance of the SSP schedule can never
be below the performance of the MS schedule.
Second, for perfect loop nests, SSP schedules are proven to be shorter than MS
schedules in terms of static cycles. Indeed, SSP overlaps the prolog and epilog of the
innermost loop and manages to keep the processor busy during the entire execution of
the schedule. If the loop nest is a single loop, then the two schedules are equivalent.
The theorem and proof are described along the schedule function for perfect loop nests in
Section 3.6.1.
3.3 SSP Implementation
The actual implementation of the SSP method into a compiler consists of severals
steps that differ from the theoretical framework. Those steps, leading to the final assembly
code, are shown in Figure 3.6. The implementation of each of those steps is one of the
main contributions of this dissertation. The related details are presented in subsequent
chapters.
The first step is again the loop selection step. We assume that the compiler pro-
vides the SSP framework with a complete multi-dimensional DDG. It may require some
information propagation about the dependences as multi-dimensional dependences are
34

n−D DDG
loop nest
loop nest
loop level
(1−D schedule)
kernel
assembly code
(final schedule)
register−allocated kernel
1−D DDG register pressure oktoo highor
SelectionLoop
SimplificationDDG
GenerationKernel
GenerationCode
AllocationRegister
Register PressureEvaluation
Figure 3.6: The SSP Framework
usually computed early in the compilation process. Loop selection heuristics are pre-
sented in Chapter 4 and were published in [RTG+04].
Once the level is chosen, the multi-dimensional DDG is simplified into a one-
dimensional DDG as explained in the previous section. This work was published in
[RTG+04].
Using the 1-D DDG, a scheduler produces the 1-D schedule, represented by the
kernel. The 1-D schedule honors the dependences from the one-dimensional graph and
takes into account the number and properties of each functional unit described in sec-
tion 3.5. The scheduler is similar to a modulo scheduler but must take into account fea-
tures specific to the SSP method and the multi-dimensional nature of the problem such
multiple kernels or multiple initiation intervals. Several scheduling algorithms are pre-
sented in Chapter 5 and were published in [DRG06].
Once the 1-D schedule is obtained, the register pressure is quickly evaluated using
a method explained in Chapter 6 and published in [DG05]. If the register pressure is too
high, the scheduler or the loop selector are asked to come up with different choices leading
to a smaller register pressure. Registers are then allocated. The method considers the
features of the multi-dimensional vector lifetimes specific to the SSP case. The register
35
allocation method is presented in Chapter 7 and was published in [RDG05].
Finally the final schedule is generated in assembly code by the code generator.
Loop overheads and architectural specifics such as register rotation are also handled by
the code generator. An implementation is described in Chapter 8 and was published in
[RDGG04].
3.4 Examples & Notations
In this section, different examples are proposed to help understand the SSP sched-
ules. First, a comparison between SSP and MS showing the potential of the SSP method
is proposed. Then, two examples of complete SSP schedules are described. The first
example deals with a double loop nest. The second considers a more complex case with
a triple loop nest. The last subsection introduces the notations about kernels.
3.4.1 SSP vs. MS Example
To show the potential of the SSP method, let us consider the double loop nest
example shown in Figure 3.7. The original source code is shown in Figure 3.7(a). We as-
sume that its intermediate form after transformations and just before the SSP/MS schedul-
ing phase is as shown in Figure 3.7(b). For clarity reasons, each operation is referred to
as op1, op2, etc... n will always refer to the depth of the loop nest, outer loops to all the
loops but the innermost and inner loops to all the loops but the outermost.
We now assume that the heuristic used by the loop selector chose the outermost
loop for software-pipelining. The kernel generated by the scheduler is shown in Fig-
ure 3.8. It is a two-dimensional SSP kernel composed of 5 stages of 2 cycles each. To
obtain such a kernel, we assume that the target processor is composed of only 2 mem-
ory units, and that we have latencies of 1, 2, and 3 cycles for the +, load/store, and *
operations respectively. For MS, the kernel is simply the innermost kernel represented in
shadow-gray boxes. The two kernels are similar because SSP is equivalent to MS when
applied to the innermost loop. It is therefore correct that they share the same innermost
36

total = 0L1: for I = 1, 6 doL2: for J = 1, 3 do
B[J] = A[I] * B[J]end fortotal += B[3]
end for
(a) Source Code
L1: for I = 1, 6 doop1: t1 = load addr1, 4
L2: for J = 1, 3 doop2: t2 = load addr2op3: t3 = t1 * t2op4: store t3, addr2, 4
end forop5: t4 = t3 + t4
end for
(b) Intermediate Form
Figure 3.7: MS vs. SSP: Loop Nest
kernel. In order to later represent schedules in a compact way, the stages of the kernel are
named a, b,...etc
e abcdop3
op4op1op2
op5
Figure 3.8: MS vs. SSP: Kernel
The full MS schedule, derived from the MS kernel, is shown in Figure 3.9(a).
The stages are now represented by their letters and the operations within are hidden.
Each stage takes two cycles to execute. The gray boxes still represent the innermost
stages, i.e. containing the operations from the innermost loop. By definition of a modulo
schedule, the innermost operations are executed in parallel once the pipeline has been
filled. It is represented by the horizontal row of stages d, c, and b. However, the outermost
iterations are not executed in parallel, which leads to a poor processor busy ratio and a
total schedule time of 84 cycles. At best, if hierarchical reduction [Lam88] is applied
using Muthukumar’s technique [MD01], then the prolog phase of the innermost pipeline
can overlap the epilog phase of the innermost pipeline of the previous outermost iteration.
The result is shown in Figure 3.9(b). The schedule time is reduced to 54 cycles.
37
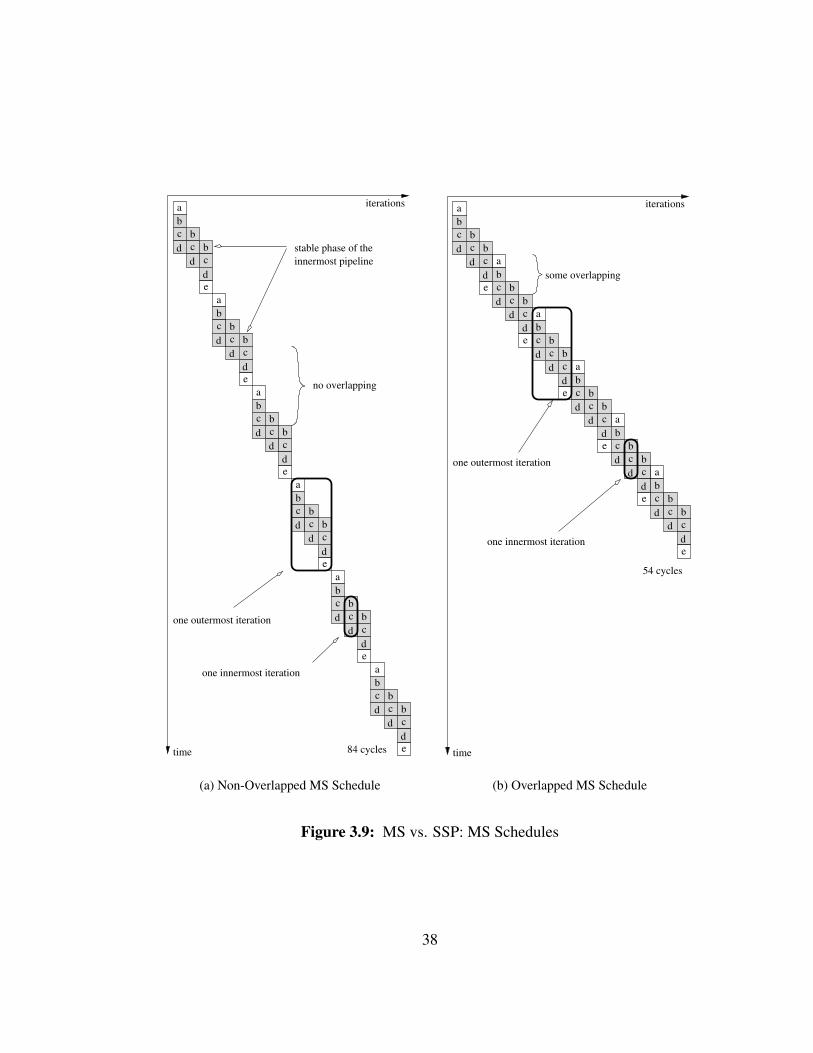
abcd
bcd
bcde
abcd
bcd
bcde
abcd
bcd
bcde
abcd
bcd
bcde
abcd
bcd
bcde
abcd
bcd
bcdetime
iterations
84 cycles
stable phase of theinnermost pipeline
no overlapping
one innermost iteration
one outermost iteration
(a) Non-Overlapped MS Schedule
abcd
bcd
bcde
abcd
bcd
bcde
abcd
bcd
bcde
abcd
bcd
bcde
abcd
bcd
bcde
abcd
bcd
bcde
iterations
time
54 cycles
some overlapping
one outermost iteration
one innermost iteration
(b) Overlapped MS Schedule
Figure 3.9: MS vs. SSP: MS Schedules
38

abcdbcdbcd
bcdbcdbcd
bcdbcdbcd
aa
aa
ae
ebcd
bcd
bcdb
cd
bcd
bcd
bcd
bcd
bcd
ee
ee
iterations
time 44 cycles
one innermost iteration
one outermost iteration
high overlapping
Figure 3.10: MS vs. SSP: SSP Schedule
However the SSP schedule is still shorter by 10 cycles. Indeed, the processor is
kept busy most of the time and all the stages are sometimes executed concurrently. This
example shows that, given the same resources and even the same instruction scheduler,
SSP schedules can be shorter than MS schedules. And since the innermost level of the
a loop nest can always be selected and SSP is equivalent to MS when applied to a sin-
gle loop, the maximum length of the SSP schedule is bounded by the length of the MS
schedule.
3.4.2 Double Loop Nest Example
To illustrate the different steps of the SSP framework, a double loop nest exam-
ple is proposed in Figure 3.11(a). The corresponding n-D DDG, is shown next to it in
Figure 3.11(b). The exact operations have been abstracted for clarity purposes.
The first step is to decide which loop level to software pipeline. We will assume
that the loop selector deemed loop level L2 as the most profitable according to the heuris-
tic used and that L2 has been selected for software-pipelining. The loop nest that we will
39

L1: for I = 1, 100 doop0
L2: for J = 1, 7 doop1
L3: for K = 1, 4 doop2op3op4
end forop5
end forend for
(a) Triple Loop Nest
op1
op4 op3
op5 op2op0
<0,1,0>
<0,0,0>
<0,0,1><0,0,0>
<0,0,0>
<0,0,0>
<0,1,0><1,0,0>
<0,1,0>
(b) Multi-Dimensional DDG
Figure 3.11: Double Loop Nest Example: Inputs
now consider is shown in Figure 3.12. Because the original outermost loop was discarded,
we will no longer refer to it. From the SSP framework point of view, the original L2 is now
the outermost loop level. Therefore the loops are renamed and L2 and L3 become the new
L1 and L2 respectively. Such renaming is always possible after loop selection. Therefore,
in the rest of the dissertation, we will always assume that the software-pipelined loop is
the outermost loop level of the loop nest.
L1: for I = 1, 7 doop1
L2: for J = 1, 4 doop2op3op4
end forop5
end for
Figure 3.12: Double Loop Nest Example: Loop Nest After Loop Selection
The next step is to simplify the n-D DDG into a 1-D DDG. Only the two innermost
40

dimensions of the n-D DDG are considered. Positive dependences are discarded. Zero
dependences are kept and the iteration distance of the selected loop level is used as the
iteration distance for the 1-D DDG. The resulting 1-D DDG is shown in Figure 3.13(a).
op1
op4 op3
op5 op2
1
0
0
0
0
1
(a) Simplified DDG
Number of All-purpose FUs: 2operation 0 1 2 3 4 5latency 2 2 2 1 1 2
(b) Resources
op1
op2op3
op4op5
abcd
T1T2
S1
S2
unused
(c) Kernel
Figure 3.13: Double Loop Nest Example: 1-D Schedule
Given the 1-D DDG and the resources of the target processor, shown in Fig-
ure 3.13(b), a 1-D schedule can be computed. The 1-D schedule is represented by a
kernel shown in Figure 3.13(c). The innermost stages have been grayed out. The op-
erations are scheduled so that the latencies between dependent operations are respected.
Also, at each given cycle, the number of scheduled operations never exceed the number of
available functional units (2). The kernel is composed of 2 outermost stages and S2 = 2
innermost stages for a total of S1 = 4 stages. The initiation interval of the outermost
kernel is equal to T1 = 3. However, the initiation interval of the innermost kernel, i.e. the
kernel used to generate the schedule corresponding to the execution of the innermost loop
and represented by the gray boxes, is lower and equal to T2 = 2. It is therefore a multiple
initiation interval kernel.
41

a
a
b
cc
cc
cc
b
b
bb
b
b
cc
cc
cc
b
b
bb
b
b
b
b
c
cd
a
a
b
b
c
cd
a
a
d
cc
cc
cc
b
b
bb
b
b
b
b
c
cd
ad
c
c
cb
b
b
cd
d 102 cycles
innermost iterations from
run concurrentlydifferent outermost iterations
outermost iteration
innermost iteration(runs sequentially with theother innermost iterationswithin the same outermostiteration)
time
(runs concurrently with theother outermost iterations)
1 outermostiterations
765432
1 2 3 4 scheduling groups
delay
T1=3
T2=2
Figure 3.14: Double Loop Nest Example: Final Schedule
42
The impact of multiple initiation interval kernel can be seen in the final schedule
shown in Figure 3.14. The stages are represented by their symbolic letters for readability
purposes. Small horizontal tics delimit the cycles within each stage. When an inner-
most stage is used alongside an outermost stage with a higher initiation interval, then its
initiation interval is adjusted with the schedule slots marked as ’unused’ in the kernel.
Otherwise, the innermost initiation interval of 2 is used. If the initiation interval of the
innermost kernel was always equal to T1 = 3 cycles, then the execution of the inner loops
would be delayed, and the final schedule would be 24 cycles longer in this particular
example.
The delay function used to enforce the resource constraints in the final schedule
has been represented by thick black arrows. Every stage that does not belong to an itera-
tion from the current group of outermost iterations is delayed. The start time of iterations
3 and above have been delayed accordingly in groups of Sn outermost iterations. Stage d
from the last outermost iteration of each scheduling group was also delayed.
The schedule illustrates how outermost iterations are executed in parallel whereas
the innermost iterations within the same outermost iteration are executed sequentially.
Innermost iterations from different outermost iterations, on the other hand, are also exe-
cuted in parallel. Because the number of outermost iterations is not a multiple of Sn, the
last outermost iteration is executed alone.
It is worth noting that the positive dependence from op4 to op2 in the original n-D
DDG is still respected. Indeed, op2 from innermost iteration J is always executed at least
1 cycle after op4 from innermost iteration J − 1.
3.4.3 Triple Loop Nest Example
The next example shows how the final schedule differs when the loop nest contains
three loops or more. The section of the schedule during the delay now also includes
the middle loops which leads to more complex patterns and a more complex schedule
43

function. The duration of the delay is also increased to take into account the newly added
loops.
We assume that the multiple initiation interval kernel of a triple loop nest is as
shown in Figure 3.15. Again, the innermost stages are grayed out while the unused sched-
ule slots are shown with hashes. The middle kernel, i.e. the kernel corresponding to the
middle loop of the original loop nest, is composed of S2 = 4 stages b, c, d, and e. As op-
posed to the previous example, the inner kernels, innermost and middle, are not scheduled
in the last schedule rows of the outermost kernel.
op6
op7
op8
op9
ef
T3
S3
op1
op2
op3
op4
op5
abcd
T2
S2
S1
T1
Figure 3.15: Triple Loop Nest Example: Kernel
The final schedule corresponding to the proposed kernel is shown in Figure 3.15.
We assume that the number of iterations for the loops are 8, 2, and 3, from the outermost
to the innermost level respectively. Indeed we have 8 columns corresponding to the 8
outermost iterations. Within each outermost iteration, the stages b and e appear only
twice, and between each appearances, the innermost stages c and d are executed three
times. Unlike the double nest example, stages are not represented in the figure according
to their to their initiation interval of the stages for space reasons.
This time the schedule has been decomposed into different sections that will later
useful for the code generation phase. The schedule starts with a Prolog, only composed
of stage a in this example. Then it is an alternation of two segments: the Outermost Loop
Pattern (OLP) and the Inner Loop Execution Segments (ILES). OLP corresponds to the
part of the schedule where outermost stages are executed. The ILES corresponds to the
44

time
a
aa
bbc
ccd
dc
cd
d
debc
cd
be
ccd
dc
cd
d
b ac b
d ce d
eff
d ce d
eff
eff
d c b ae d c b a
d c b ae d c b a
eff
Innermost LoopPattern (ILP)
Draining & FillingPattern (DFP)
Innermost LoopPattern (ILP)
Outermost LoopPattern (OLP)
Segment (ILES)Innermost Loop Execution
Outermost LoopPattern (OLP)
1 765432
1 32 4
8
scheduling groups
Epilog
Folded ILES
Prologoutermostiterations
Figure 3.16: Triple Loop Nest Example: Schedule
45
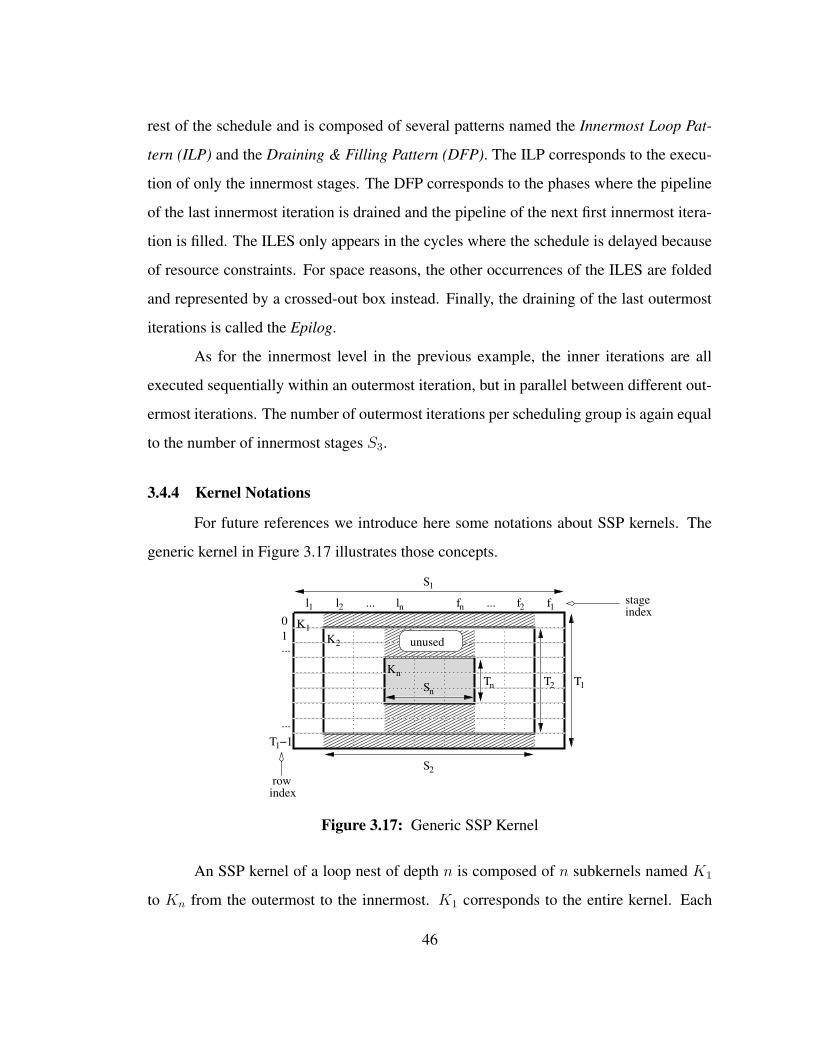
rest of the schedule and is composed of several patterns named the Innermost Loop Pat-
tern (ILP) and the Draining & Filling Pattern (DFP). The ILP corresponds to the execu-
tion of only the innermost stages. The DFP corresponds to the phases where the pipeline
of the last innermost iteration is drained and the pipeline of the next first innermost itera-
tion is filled. The ILES only appears in the cycles where the schedule is delayed because
of resource constraints. For space reasons, the other occurrences of the ILES are folded
and represented by a crossed-out box instead. Finally, the draining of the last outermost
iterations is called the Epilog.
As for the innermost level in the previous example, the inner iterations are all
executed sequentially within an outermost iteration, but in parallel between different out-
ermost iterations. The number of outermost iterations per scheduling group is again equal
to the number of innermost stages S3.
3.4.4 Kernel Notations
For future references we introduce here some notations about SSP kernels. The
generic kernel in Figure 3.17 illustrates those concepts.
unused
f2 f1
T2 T1nTKn
K2
K1
S2
Sn
fnlnl2l1
S1
T −11
stageindex
......01...
...
rowindex
Figure 3.17: Generic SSP Kernel
An SSP kernel of a loop nest of depth n is composed of n subkernels named K1
to Kn from the outermost to the innermost. K1 corresponds to the entire kernel. Each
46

subkernel Ki is made of Si = li− fi stages where fi and li are the indexes of the first and
last stage of Ki in K1. The initiation interval of each subkernel Ki is noted Ti. The used
schedule slots may contain 0, 1, or more operations. The number of operations within one
cycle, i.e. a row in the generic kernel, is limited by the resource constraints. The number
of unused cycles above subkernel Ki is noted Tai. The number of unused cycles below
subkernel Ki is noted Tbi.
The 1-D schedule function of an operation op in the kernel is noted σ(op, i1). i1
represents the outermost iteration index. Operations from the same instance of the kernel
share the same i1 value. The stage index and row index can be derived from the 1-D
schedule function. We can write σ(op, 0) = p ∗ T + q where q < T . Then p is the stage
index of op and q the row index of op in the kernel. We also have p = bσ(op, i1)/T cand q = σ(op, i1) modulo T . The stage and row indexes will be necessary for several
algorithms in subsequent chapters.
If the loop nest is perfect, the kernel is composed solely of the innermost kernel
Kn. Therefore a single initiation interval T = Tn is used. In the most general case, the
loop nest is imperfect and each loop level uses its own initiation interval. For theoretical
and practical issues, a kernel with multiple initiation interval can always be considered
as a schedule with single initiation interval from which the unused cycles have been re-
moved.
For clarity reasons, the unused slots of the subkernels are assumed to contain no
operations. However, the theory and algorithms presented in the dissertation consider
that operations may appear in those cycles. Indeed an operation from level i can appear
in any cycle within the boundaries of subkernel Ki. Some practical issues will limit such
freedom at the code generation level, as presented in Chapter 8.
3.5 One-Dimensional Schedule Constraints
The 1-D schedule must obey some constraints to be correct. This section presents
those constraints in three situations from the most specific to the most general: perfect
47

loop nests, imperfect loop nests with single initiation interval, and imperfect loop nests
with multiple initiation intervals.
3.5.1 Perfect Loop Nests
In the case of perfect loop nests, the 1-D schedule is uniquely composed of opera-
tions from the innermost loop. Therefore the kernel consists of only innermost stages and
all the stages have the same initiation interval T . The constraints to be respected by the
1-D schedule can then be written as shown in Figure 3.18.
• Modulo Property:
σ(op, i1 + 1) = σ(op, i1) + T (3.1)
• Dependence Constraints:
σ(op1, i1) + δ ≤ σ(op2, i1 + k) (3.2)
for all the dependences from the 1-D DDG from op1 to op2 where δ is thelatency of the dependence and k the distance.
• Resource Constraints:
At any given cycle of the 1-D schedule, a hardware resource is not allocatedto more than one operation.
• Sequential Constraints:
σ(op, 0) + δmax(op) ≤ S ∗ T (3.3)
where δmax(op) = max(δ) for all the positive dependences starting from opin the original n-D DDG.
Figure 3.18: 1-D Schedule Constraints in the case of Perfect Loop Nests
The first 3 constraints are the same as the constraints used in MS. The modulo
constraint ensures that a new outermost iteration is issued every T cycles. The dependence
constraint ensures that the dependences from the 1-D DDG are respected while taking into
48

account the modulo property. The resource constraints ensures that the target architecture
can actually execute the 1-D schedule.
The sequential constraint however is unique to the SSP method. It ensures that the
positive dependences, not present in the 1-D DDG, are respected. In the final schedule,
such a dependence only exist between operations from different slices (Figure 3.2). If the
dependence is already respected at the end of the slice of the originating operation, then it
will be guaranteed to be respected in the subsequent slices. In the first outermost iteration
of the first slice, as shown in Figure 3.19, the destination operation can be scheduled once
the positive dependence is respected, i.e. after cycle σ(op, 0) + δmax. The end of the
first slice is at cycle S ∗ T , where S ∗ T is the length of the 1-D schedule (S stages of T
cycles each). Therefore the positive dependence is always respected if we guarantee that
σ(op, 0) + δmax(op) ≤ S ∗ T . Because the destination operation is not necessarily in the
first cycle of the next slice, the constraint is not tight. However it simplifies the schedul-
ing process while making sure that positive dependences are respected. In practice, the
constraint is respected most of the time without taking any special action.
abcdabcdabcd
abcd
abcd
abcd
abcd
abcd
abcd
abcd
abcd
abcd
abcd
abcd
abcd
slice 0
slice 1
slice 2
positive dependence
S.T
σ
δ
Figure 3.19: Sequential Constraint Example
49

3.5.2 Imperfect Loop Nests & Single Initiation Interval
When considering imperfect loop nests, the constraints are slightly different. We
first consider the easier case where the initiation interval is the same for every subkernel.
The constraints are shown in Figure 3.20.
• Modulo Property:
σ(op, i1 + 1) = σ(op, i1) + T (3.4)
• Dependence Constraints:
σ(op1, i1) + δ ≤ σ(op2, i1 + k) (3.5)
for all the dependences from the 1-D DDG from op1 to op2 where δ is thelatency of the dependence and k the distance.
• Resource Constraints:
At any given cycle of the 1-D schedule, a hardware resource is not allocatedto more than one operation.
• Sequential Constraints:
σ(op, 0) + δ ≤ Sp ∗ T (3.6)
for every positive dependence−→d = (d1, ..., dn) originating from op in the
original n-D DDG and where dp is the first non-null element in the subvector(d2, ..., dn).
• Innermost Level Separation Constraint:
Only operations from the innermost loop can be scheduled in the innermoststages.
Figure 3.20: 1-D Schedule Constraints in the Case of Imperfect Loop Nests and SingleInitiation Interval
The first three constraints are identical to the perfect loop nest case. The sequential
constraint differs in the sense that positive dependences must now be respected at the end
of the execution of the loop at level pwhere dp is the first non-null element in the subvector
50

(d2, ..., dn). The size of corresponding slice is therefore Sp ∗ T instead of S ∗ T . Because
p may be different for each positive dependence originating from the same operation, the
latency δ is used instead of δmax.
The last constraint is new and not necessary in theory. In practice, however, it is
required to limit the code size of the final schedule during the code generation step. A 1-D
schedule that does not respect the innermost level separation constraint would be correct,
but too inefficient to use in practice. For more details, the reader is referred to Chapter 8.
3.5.3 Imperfect Loop Nests & Multiple Initiation Intervals
If multiple initiation intervals are allowed in the kernel, then the constraints are
different, as shown in Figure 3.21.
The modulo property and the resource and innermost level separation constraints
are unchanged. The separation constraint is considering the worst-case scenario in the
sense that it becomes more complex to compute the length of the execution of loop level
p. The smallest initiation interval is Tn so a lower bound of the length of the execution of
loop level p is Sp ∗ Tn.
The dependence constraint must now take into account the missing cycles oc-
curred by the multiple initiation interval situation. The function that returns the num-
ber of missing cycles between the schedule cycles of operations op1 and op2 is named
UnusedCycles(op1, op2, k). If p1 and p2 are the stage indexes of op1 and op2 respec-
tively, and if level(s) returns the level of stage s, then the function is defined as:
If σ(op1, 0) ≤ σ(op2, 0) and p1 = p2, then
UnusedCycles(op1, op2, k) = k ∗s=S−1∑
s=0
(T − Tlevel(s)) (3.10)
51

• Modulo Property:
σ(op, i1 + 1) = σ(op, i1) + T (3.7)
• Dependence Constraints:
σ(op1, i1) + δ ≤ σ(op2, i1 + k)− UnusedCycles(op1, op2, k) (3.8)
for all the dependences from the 1-D DDG from op1 to op2 where δ is thelatency of the dependence and k the distance.
• Resource Constraints:
At any given cycle of the 1-D schedule, a hardware resource is not allocatedto more than one operation.
• Sequential Constraints:
σ(op, 0) + δ ≤ Sp ∗ Tn (3.9)
for every positive dependence−→d = (d1, ..., dn) originating from op in the
original n-D DDG and where dp is the first non-null element in the subvector(d2, ..., dn).
• Innermost Level Separation Constraint:
Only operations from the innermost loop can be scheduled in the innermoststages.
Figure 3.21: 1-D Schedule Constraints in the Case of Imperfect Loop Nests and MultipleInitiation Intervals
52

If σ(op1, 0) ≤ σ(op2, 0) and p1 < p2, then
UnusedCycles(op1, op2, k) =
s=p2−1∑
s=p1+1
(T − Tlevel(s)) + Tblevel(p2) + Talevel(p1)
+k ∗s=S−1∑
s=0
(T − Tlevel(s)) (3.11)
Otherwise, if σ(op1, 0) > σ(op2, 0), the function is defined as:
UnusedCycles(op1, op2, k) =s=S−1∑
s=p1+1
(T − Tlevel(s)) +
s=p2−1∑
s=0
(T − Tlevel(s))
+Tblevel(p2) + Talevel(p1)
+k ∗s=S−1∑
s=0
(T − Tlevel(s)) (3.12)
The number of missing cycles is obtained by counting all the unused cycles between
op1 and op2. That number includes the unused cycles of the stages between the two
operations, stages of the operations excluded, the unused cycles in the stage of op2 before
op2 (Tblevel(p2)), the unused cycles in the stage of op1 after op1 (Talevel(p1)), and the total
number of unused cycles in the kernel multiplied by the distance k. Depending on the
relative 1-D schedule time of the two operations, the unused cycles of the stages between
the two operations differ. Figure 3.22 illustrates it with a kernel example from a 3-deep
loop nest. The thick black strip represents the distance between the two operations while
the unused cycles that need to be subtracted from that distance have been grayed out. The
terms corresponding to the sum(s) in UnusedCycles have been noted with a large sigma
sign, and the others with Ta and Tb.
The innermost level separation constraint does not prevent operations from level
i and below from appearing in the unused cycles of above and below subkernel Ki+1.
Those operations will be conditionally emitted to produce the final schedule, as explained
in Chapter 8. They do not interfere with the other constraints and the definition of
UnusedCycles.
53

op2
op1
Σ TaTb
(a) When σ(op1, i1) ≤ σ(op2, i1)
op2
op1
TbTaΣ Σ1 2
(b) When σ(op1, i1) > σ(op2, i1)
Figure 3.22: Unused Cycles Computation Examples
3.6 Schedule Function
We now present mathematical formulations of the schedule function of operations
in the final schedule when possible. Correctness proofs will also be given. We first present
the simpler case of perfect loop nests, followed by imperfect loop nests, with single, then
multiple initiation intervals.
3.6.1 Perfect Loop Nests
The final schedule cycle of an operation op at iteration−→I = (i1, ..., in) in a perfect
loop nest can be computed. To ease the understanding, Figure 3.23 shows an example of a
triple loop nest schedule. Because the loop nest is perfect, the kernel is composed of only
innermost stages and every stage has the same initiation interval T . The number of stages
is assumed to be equal to S = 2. One full innermost iteration is represented by a box.
The color of the box indicates the innermost iteration index within one middle iteration.
The darker the box, the greater the index. The number of iterations for each loop level
is N1 = 6, N2 = 2, and N3 = 2 from the outermost to the innermost respectively. The
dashed print represent the position of the outermost iterations before resource constraints
forced the iterations to be pushed down in the schedule.
The schedule function is composed of four terms. Each term is illustrated in the
Figure for an operation op from iteration (5, 1, 1). The first term gives the starting cycle
54

delay from outermostiteration index
delay from resourceconstraints
delay from inneriteration indexes
1−D schedule
time
outermostiterations
0 1 2 3 4 5
one middleiteration
iterationone innermost
operation o atindex (5,1,1)
Figure 3.23: Perfect Loop Nest: Schedule Example of Operation op at iteration index(5, 1, 1)
55

of an outermost iteration without resource constraints. Because in those conditions a new
outermost iterations is to be issued every T cycles, that term is equal to:
i1 ∗ T (3.13)
The second term takes into consideration the delay induced by the resource con-
straints. The execution of the stalled outermost iterations last for the entire execution of
the inner loops minus one innermost iteration which is executed in parallel with the other
outermost iterations. To execute all the inner iterations, each stage must be executed
N2 ∗N3. To execute all the stages once, it takes S ∗ T cycles. The delay S ∗ T ∗N2 ∗N3
must be applied every time, the outermost iteration is pushed down, i.e. bi1/Sc. There-
fore, in general, the delay from resource constraints is equal to:
S ∗ T ∗⌊i1S
⌋∗(j=n∏
j=2
Nj − 1
)(3.14)
The third term corresponds to the iteration of the instance of the operation within
the outermost iteration. In our example, i2 = 1 and i3 = 1, which means that the middle
loop must be fully executed once (i2 ∗ S ∗ T ∗N3 cycles) and that the innermost iteration
has already been executed once (i3 ∗ S ∗ T cycles). In the general case the corresponding
delay can be expressed as:
S ∗ T ∗k=n∑
k=2
(ik ∗
j=n+1∏
j=k+1
Nj
)where Nn+1 = 1 (3.15)
Finally, once the correct set of innermost stages has been reached, one only needs
to add the schedule cycle of operation op in the 1-D schedule, i.e. σ(op, 0). The final
schedule function f of an operation op at iteration index−→I = (i1, . . . , in) is then defined
as shown in Figure 3.24. It is correct as stated by the following theorem:
Theorem 3.1 If the loop nest is perfect, then the schedule function proposed in Equa-
tion 3.16 respects both the dependencies from the n-D DDG and the resource constraints
56

f(op,−→I ) = σ(op, 0) + i1 ∗ T + S ∗ T ∗
⌊i1S
⌋∗(j=n∏
j=2
Nj − 1
)
+S ∗ T ∗k=n∑
k=2
(ik ∗
j=n+1∏
j=k+1
Nj
)(3.16)
Figure 3.24: Schedule Function for Perfect Loop Nests
Proof. We need to prove two points. First, we must show that both positive and zero
dependences from the n-D DDG are respected. Second, we must show that, at any given
cycle, a resource is never used more than once.
Given a multi-dimensional dependence from operation op1 to op2 with a latency δ
and distance vector−→d = (d1, ..., dn), the dependence is respected if f(op2,
−→I +
−→d ) −
f(op1,−→I ) ≥ 0. Using Equation 3.1, we have:
f(op2,−→I +−→d )− f(op1,
−→I )
= σ(op2, 0)− σ(op1, 0) + d1 ∗ T (3.17)
+S ∗ T ∗(⌊
i1 + d1
S
⌋−⌊i1S
⌋)∗(j=n∏
j=2
Nj − 1
)(3.18)
+S ∗ T ∗k=n∑
k=2
(dk ∗
j=n+1∏
j=k+1
Nj
)(3.19)
The term 3.18 and d1 ∗ T are positive. We have to prove that the rest of the
difference is positive for both types of dependences:
• If the dependence is a zero dependence, we have d2 = ... = dn = 0 and d1 ≥ 0.
Then:
f(op2,−→I +−→d )− f(op1,
−→I ) ≥ σ(op2, i1)− σ(op1, i1)
≥ δ using Equation 3.2
≥ 0 (3.20)
57

• If the dependence is a positive dependence, we have σ(op2, i1) ≥ 0 by definition,
and, thanks to Equation 3.3,−σ(op1, i1) ≥ δmax(op1)−S∗T ≥ −S∗T . Therefore:
f(op2,−→I +−→d )− f(op1,
−→I ) ≥ −S ∗ T + S ∗ T ∗
k=n∑
k=2
(dk ∗
j=n+1∏
j=k+1
Nj
)
≥ S ∗ T ∗[k=n∑
k=2
(dk ∗
j=n+1∏
j=k+1
Nj
)− 1
](3.21)
If dp is the first non-null index of the positive dependence vector, then dp ≥ 1 and
we have:
k=n∑
k=2
(dk ∗
j=n+1∏
j=k+1
Nj
)
= dp ∗j=n+1∏
j=p+1
Nj +k=n∑
k=p+1
(dk ∗
j=n+1∏
j=k+1
Nj
)
≥ dp ∗j=n+1∏
j=p+1
Nj −k=n∑
k=p+1
(|dk| ∗
j=n+1∏
j=k+1
Nj
)because dk ≥ −|dk|
≥ dp ∗j=n+1∏
j=p+1
Nj +k=n∑
k=p+1
((1−Nk) ∗
j=n+1∏
j=k+1
Nj
)because |di| ≤ Ni − 1
≥ dp ∗j=n+1∏
j=p+1
Nj +k=n∑
k=p+1
j=n+1∏
j=k+1
Nj −k=n∑
k=p+1
(Nk ∗
j=n+1∏
j=k+1
Nj
)
≥ dp ∗j=n+1∏
j=p+1
Nj +k=n∑
k=p+1
j=n+1∏
j=k+1
Nj −k=n−1∑
k=p
j=n+1∏
j=k+1
Nj
≥ dp ∗j=n+1∏
j=p+1
Nj +Nn+1 −j=n+1∏
j=p+1
Nj
≥ (dp − 1) ∗j=n+1∏
j=p+1
Nj +Nn+1
≥ Nn+1 because dp ≥ 1
≥ 1 (3.22)
58

Therefore, using Equations 3.21 and 3.22, we can conclude that, in the case of a
positive dependence from op1 to op2, we have:
f(op2,−→I +−→d )− f(op1,
−→I ) ≥ 0 (3.23)
Using Equation 3.23 and Equation 3.20, we prove that both positive and zero depen-
dences, i.e. all the dependences from the original n-D DDG, are enforced.
Lastly, we need to prove that, at any cycle, no resource is used more than once.
Let op1 and op2 be two operations appearing in the same cycle in the final schedule at
iteration−→I = (i1, ..., in) and
−→I +−→d = (i1 +d1, ..., in+dn), respectively. Then we have:
f(op2,−→I +−→d )− f(op1,
−→I )
= σ(op2, i1)− σ(op1, i1) + d1 ∗ T + S ∗ T ∗k=n∑
k=2
(dk ∗
j=n+1∏
j=k+1
Nj
)
+S ∗ T ∗(⌊
i1 + d1
S
⌋−⌊i1S
⌋)∗(j=n∏
j=2
Nj − 1
)
= 0 (3.24)
If (d1, ..., dn) = (0, ..., 0), then σ(op1, i1) = σ(op2, i1). In other words, the two
operations belong to the same schedule slot of the kernel. Thanks to the resource con-
straint of the kernel, there cannot be any resource conflict between them. Therefore, if
there is a resource conflict, we must have (d1, ..., dn) 6= (0, ..., 0).
Because every term of the above equation, except σ(op2, i1) − σ(op1, i1), is a
multiple of T , then σ(op1, i1) and σ(op2, i1) have the same value modulo T . Therefore, if
there is a resource conflict, the two operations must appear in the same row in the kernel.
However, the resource constraint enforced on the kernel ensures that operations
scheduled in the same row have no resource conflict. Therefore, if there is a resource
conflict in the final schedule, at least one operation must have two instances scheduled at
the same cycle. If we can guarantee that at any cycle an operation appears no more than
once, then the schedule has no resource conflict.
59

Let us assume the contrary and prove that it is absurd. Let us assume that op1 =
op2. We have two cases depending on if the instances of the operation belong to the same
scheduling group or not:
• If the two instances of the operations belong to the same scheduling group, i.e. |d1|< S and
⌊i1S
⌋=⌊i1+d1
S
⌋, then we have:
f(op2,−→I +−→d )− f(op1,
−→I ) = 0
⇒ d1 ∗ T + S ∗ T ∗k=n∑
k=2
(dk ∗
j=n+1∏
j=k+1
Nj
)= 0
⇒ S ∗k=n∑
k=2
(dk ∗
j=n+1∏
j=k+1
Nj
)= −d1 (3.25)
⇒ S ∗∣∣∣∣∣k=n∑
k=2
(dk ∗
j=n+1∏
j=k+1
Nj
)∣∣∣∣∣ < S because |d1| < S
⇒∣∣∣∣∣k=n∑
k=2
(dk ∗
j=n+1∏
j=k+1
Nj
)∣∣∣∣∣ < 1
⇒k=n∑
k=2
(dk ∗
j=n+1∏
j=k+1
Nj
)= 0
We now prove by recurrence that the last equation implies that d2 to dn are equal
to zero. If n = 2, the property is obviously true. If the property is true for n = p,
i.e. we have the following recurrence property:k=p∑
k=2
(dk ∗
j=p+1∏
j=k+1
Nj
)= 0 =⇒ (d2, ..., dp) = (0, ..., 0)
we show that it is true if n = p+ 1:k=n∑
k=2
(dk ∗
j=n+1∏
j=k+1
Nj
)= 0
⇒ dn = −Nn ∗k=p∑
k=2
(dk ∗
j=p+1∏
j=k+1
Nj
)
⇒ |dn| = Nn ∗∣∣∣∣∣
k=p∑
k=2
(dk ∗
j=p+1∏
j=k+1
Nj
)∣∣∣∣∣
60

If the sum on the right-hand side is strictly positive, then |dn| > Nn, which is
impossible. Therefore the sum is equal to zero and dn = 0. Using the recurrence
property for n = p, we show that (d2, ..., dn − 1) = (0, ..., 0). Therefore our
recurrence property is also verified for n = p+ 1.
Thus, (d2, ..., dn) = (0, ..., 0). According to Equation 3.25, d1 is also equal to zero,
which is impossible because−→d 6= −→0 . Therefore op1 6= op2.
• If the two instances of the operations do not belong to the same scheduling group,
i.e.⌊i1+d1
S
⌋−⌊i1S
⌋≥ 1, then we have:
f(op2,−→I +−→d )− f(op1,
−→I )
≥ d1 ∗ T + S ∗ T ∗k=n∑
k=2
(dk ∗
j=n+1∏
j=k+1
Nj
)+ S ∗ T ∗
(j=n∏
j=2
Nj − 1
)
≥ d1 ∗ T − S ∗ T ∗k=n∑
k=2
(|dk| ∗
j=n+1∏
j=k+1
Nj
)+ S ∗ T ∗
(j=n∏
j=2
Nj − 1
)
Because |dk| ≤ Nk − 1, we can continue using Nn+1 = 1 later:
≥ d1 ∗ T + S ∗ T ∗[(
j=n∏
j=2
Nj − 1
)−
k=n∑
k=2
((Nk − 1) ∗
j=n+1∏
j=k+1
Nj
)]
≥ d1 ∗ T + S ∗ T ∗[j=n∏
j=2
Nj − 1−k=n∑
k=2
j=n+1∏
j=k
Nj +k=n∑
k=2
j=n+1∏
j=k+1
Nj
]
≥ d1 ∗ T + S ∗ T ∗[j=n+1∏
j=2
Nj − 1−k=n∑
k=2
j=n+1∏
j=k
Nj +k=n∑
k=2
j=n+1∏
j=k+1
Nj
]
≥ d1 ∗ T + S ∗ T ∗[j=n+1∏
j=2
Nj − 1−k=n−1∑
k=1
j=n+1∏
j=k+1
Nj +k=n∑
k=2
j=n+1∏
j=k+1
Nj
]
≥ d1 ∗ T + S ∗ T ∗[j=n+1∏
j=2
Nj − 1−j=n+1∏
j=2
Nj +Nn+1
]
≥ d1 ∗ T
Because f(op2,−→I +
−→d ) − f(op1,
−→I ) = 0 and T > 0, we have d1 = 0. However
we had by hypothesis d1 > 0. Therefore the result is absurd and op1 6= op2.
61

Therefore an operation cannot appear more than once at given cycle in the final schedule
and the final schedule has no resource conflict. �Next, we compare the execution time of the final SSP schedule with the most
optimistic MS schedule under the same initiation interval T and number of stages S. We
assume that the prolog and epilog phases of the MS schedule are entirely overlapped as
proposed in [MD01].
Theorem 3.2 Given a perfect loop nest with a number of outermost iterations N1 and an
SSP kernel and MS kernel with the same number of stages S and initiation interval T ,
if N1 is divisible by S, then the length of the final SSP schedule is not greater than the
length of the MS schedule.
Proof. In the most optimistic case, the MS schedule of a perfect loop nest overlapping
prologs and epilogs will issue a new iteration every T cycles. It will then take (S− 1) ∗Tcycles to flush the pipeline. Therefore the length of the MS schedule is:
lengthMS = T ∗ (
j=n∏
j=1
Nj + S − 1) (3.26)
The length of SSP final schedule can be computed using the schedule function
from Equation 3.16. The last cycle corresponds to an operation op scheduled in the last
cycle of the kernel (σ(op, 0) = S∗T−1) at iteration vector (N1−1, ..., Nn−1). Therefore
the length of the final schedule is equal to:
lengthSSP
= 1 + f(op, (N1 − 1, ..., Nn − 1))
= 1 + (S ∗ T − 1) + (N1 − 1) ∗ T + S ∗ T ∗⌊N1 − 1
S
⌋∗(j=n∏
j=2
Nj − 1
)
+S ∗ T ∗k=n∑
k=2
((Nk − 1) ∗
j=n+1∏
j=k+1
Nj
)
62

Because N1 is divisible by S,⌊N1−1S
⌋= N1
S− 1 and after expanding, we obtain:
= S ∗ T + (N1 − 1) ∗ T + S ∗ T ∗(N − 1
S− 1
)∗(j=n∏
j=2
Nj − 1
)
+S ∗ T ∗(k=n∑
k=2
j=n+1∏
j=k
Nj −k=n∑
k=2
j=n+1∏
j=k+1
Nj
)
= S ∗ T + (N1 − 1) ∗ T + S ∗ T ∗(N − 1
S− 1
)∗(j=n∏
j=2
Nj − 1
)
+S ∗ T ∗(k=n−1∑
k=1
j=n+1∏
j=k+1
Nj −k=n∑
k=2
j=n+1∏
j=k+1
Nj
)
= S ∗ T + (N1 − 1) ∗ T + S ∗ T ∗(N − 1
S− 1
)∗(j=n+1∏
j=2
Nj − 1
)
+S ∗ T ∗(j=n+1∏
j=2
Nj − 1
)by elimination and because Nn+1 = 1
= S ∗ T + (N1 − 1) ∗ T + S ∗ T ∗(N1 − 1
S
)∗(j=n+1∏
j=2
Nj − 1
)
= T ∗[S +N1 − 1 + (N1 − 1) ∗
(j=n+1∏
j=2
Nj − 1
)]
= T ∗[S +N1 − 1 +
j=n+1∏
j=1
Nj −N1
]
Therefore, we have:
lengthSSP = T ∗(S − 1 +
j=n+1∏
j=1
Nj
)(3.27)
Because Nn+1 = 1, Equations 3.26 and 3.27 are identical. Therefore, under the same
conditions, if N1 is divisible by S, then the SSP final schedule is at least as short as the
MS schedule. �If N1 is not divisible by S, loop peeling is always possible. Moreover, the extra
iterations are negligible compared to the execution of the loop nest and, in practice, the
result still holds even if N1 is not divisible by S.
63

3.6.2 Imperfect Loop Nests & Single Initiation Interval
In practice, most of the loop nests are imperfect. Even if the loop nest is perfect
at the source level, compiler optimizations, transformations and address calculations will
most likely make it imperfect by the time the loop nest is to be scheduled. In this section,
we present the schedule function of the SSP final schedule in the case of imperfect loop
nests. We assume here that all the subkernels share the same initiation interval T .
To compute the function, four terms must be taken into account. Let us consider
the instance of an operation op at iteration−→I = (i1, ..., in). As in the case of perfect
loop nests, the first term represents the cycle of the operation within the 1-D schedule,
σ(op, 0), and the second term is the starting cycle of an outermost iteration and is equal
to:
i1 ∗ T (3.28)
The third term corresponds to the execution time of the inner iterations within the
current outermost iteration:
k=n∑
k=2
ik ∗ timeLk (3.29)
where timeLk is the execution time of one iteration of the loop Lk within one outermost
iteration in the ideal schedule where operations have not been delayed yet:
timeLk =i=n∑
i=k
((Si − Si+1) ∗ T ∗
j=i∏
j=k+1
Nj
)
Sn+1 = 0
Finally the delay is added, incurred by the resource conflicts that may appear in
the ideal schedule. Every Sn stages, the non-innermost stages are pushed down. The
length of the push is equal to the execution time of all the inner iterations that appear in
the ILES, i.e. timeL1 − S1 ∗ T . The formula must also take into account that during
64

the prolog and epilog of the final schedule some pushes are omitted, leading to this rather
complex definition:
push(op,−→I ) ∗ (timeL1 − S1 ∗ T ) (3.30)
where:
push(op,−→I ) =
max(
0,⌊i1+stage(op)−fn+1
Sn
⌋)if (i2, ..., in)=(0, ..., 0) andstage(op) < fn
min(⌊
N1
Sn
⌋,⌊i1+stage(op)−ln
Sn
⌋)if (i2, ..., in)=(N2-1, ..., Nn-1)and stage(op) > ln⌊
i1Sn
⌋otherwise
stage(op) =
⌊σ(op, 0)
T
⌋
The schedule function for imperfect loop nests with single initiation intervals can
then be written as shown in Figure 3.25. It is correct, as stated by the next theorem.
f(op,−→I ) = σ(op) + i1 ∗ T +
k=n∑
k=2
ik ∗ timeLk
+push(op,−→I ) ∗ (timeL1 − S1 ∗ T ) (3.31)
Figure 3.25: Schedule Function for Imperfect Loop Nests with Single Initiation Interval
Theorem 3.3 If the loop nest is imperfect and a single initiation interval is used for the
kernel, the schedule function proposed in Equation 3.31 respects both the dependencies
from the n-D DDG and the resource constraints.
Proof. To prove the theorem we must again show that both zero and positive dependences
from the n-D DDG and the resource constraints are enforced. Given a multi-dimensional
dependence from operation op1 to operation op2 with a latency δ and a dependence vector
65

−→d = (d1, ..., dn), the dependence is respected if, at any iteration vector
−→I = (i1, ..., in),
we have:
f(op2,−→I +−→d )− f(op1,
−→I ) ≥ δ (3.32)
However, f(op2,−→I +−→d )− f(op1,
−→I ) can be rewritten:
f(op2,−→I +−→d )− f(op1,
−→I )
= σ(op2, 0)− σ(op1, 0) + d1 ∗ T (3.33)
+k=n∑
k=2
dk ∗ timeLk (3.34)
+(push(op2,
−→I +−→d )− push(op1,
−→I ))∗ (timeL1 − S1 ∗ T ) (3.35)
We make the difference between positive and zero dependences:
• If the dependence is a zero dependence, then (d2, ..., dn) = (0, ..., 0) and Equa-
tion 3.5 applies. And because the execution time of the outermost loop, timeL1 , is
at least equal to the total execution time of each of its stages, we have:
k=n∑
k=2
dk ∗ timeLk ≥ 0
σ(op2, 0)− σ(op1, 0) + d1 ∗ T ≥ δ
timeL1 − S1 ∗ T ≥ 0
Therefore we only need to show that:
pushdiff = push(op2,−→I +−→d )− push(op1,
−→I ) ≥ 0 (3.36)
To prove it, we will need the following Lemma:
Lemma 3.1 If there is a zero dependence−→d = (d1, 0, ..., 0) from op1 to op2 in the
n-D DDG, then stage(op2) + d1 ≥ stage(op1)
66

Proof. Indeed, because the kernel enforces the dependence constraint we have:
σ(op2, 0) +d1 ∗ T ≥ σ(op1, 0). After dividing by T , we obtain the result of the
lemma. �
The different definitions of the push function have now to be considered:
– If (i1, ..., in) = (0, ..., 0), stage(op2) < fn, and stage(op1) < fn, using
Lemma 3.1, we have: (i1 + d1 + stage(op2)− fn + 1)− (i1 + stage(op1)−fn + 1) = stage(op2)− stage(op1) + d1 ≥ 0. Therefore:
pushdiff = max
(0,
⌊i1 + d1 + stage(op2)− fn + 1
Sn
⌋)
−max(
0,
⌊i1 + stage(op1)− fn + 1
Sn
⌋)
≥ 0
– If (i1, ..., in) = (0, ..., 0), stage(op2) < fn, and stage(op1) ≥ fn, using first
Lemma 3.1, then the hypothesis, we have: (i1+d1+stage(op2)−fn+1)−i1 ≥stage(op1)− fn + 1 ≥ 0. Therefore:
pushdiff = max
(0,
⌊i1 + d1 + stage(op2)− fn + 1
Sn
⌋)−⌊i1Sn
⌋≥ 0
– If (i1, ..., in) = (0, ..., 0), stage(op2) ≥ fn, and stage(op1) < fn, using first
Lemma 3.1, then the hypothesis, we have: (i1 +d1)− (i1 +stage(op1)−fn+
1) ≥ stage(op2)− fn + 1 ≥ 0. Therefore:
pushdiff =
⌊i1 + d1
Sn
⌋−max
(0,
⌊i1 + stage(op1)− fn + 1
Sn
⌋)≥ 0
– If (i1, ..., in) = (N2 − 1, ..., Nn − 1), stage(op2) > ln, and stage(op1) > ln,
using Lemma 3.1, we have: (i1 + d1 + stage(op2)− ln)− (i1 + stage(op1)−ln) = stage(op2) + d1 − stage(op1) ≥ 0. Therefore:
pushdiff = min
(⌊N1
Sn
⌋,
⌊i1 + d1 + stage(op2)− ln
Sn
⌋)
−min(⌊
N1
Sn
⌋,
⌊i1 + stage(op1)− ln
Sn
⌋)
≥ 0
67

– If (i1, ..., in) = (N2 − 1, ..., Nn − 1), stage(op2) > ln, and stage(op1) ≤ ln,
using the hypothesis and because d1 ≥ 0, we have: (i1 + d1 + stage(op2) −ln)− i1 = d1 + stage(op2)− ln ≥ 0. Therefore:
pushdiff = min
(⌊N1
Sn
⌋,
⌊i1 + d1 + stage(op2)− ln
Sn
⌋)−⌊i1Sn
⌋≥ 0
– If (i1, ..., in) = (N2 − 1, ..., Nn − 1), stage(op2) ≤ ln, and stage(op1) > ln,
using first Lemma 3.1, and then because stage(op2) ≥ 0 and ln ≥ 0, we have:
(i1 + d1)− (i1 + stage(op1)− ln) = ln − stage(op2) ≥ 0. Therefore:
pushdiff =
⌊i1 + d1
Sn
⌋−min
(⌊N1
Sn
⌋,
⌊i1 + stage(op1)− ln
Sn
⌋)≥ 0
– In every other case, we have:
pushdiff =
⌊i1 + d1
Sn
⌋−⌊i1Sn
⌋≥ 0
Therefore, in every case, Equation 3.36 is verified and the zero dependences are
always honored in the final schedule.
• If the dependence is a positive dependence instead, let us assume that d2 is the first
non-null index of (d2, ..., dn). The following reasoning can be also be applied if the
first non-null index is different. Thanks to Equation 3.6 and because d1 ≥ 0 and
σ(op2, 0) ≥ 0, we have a lower bound for the term 3.33:
σ(op2, 0)− σ(op1, 0) + d1 ∗ T ≥ δ − S2 ∗ T (3.37)
We now also give a lower bound to the second term 3.34:
k=n∑
k=2
dk ∗ timeLk =k=n∑
k=2
i=n∑
i=k
dk ∗ T ∗ (Si − Si+1) ∗j=i∏
j=k+1
Nj
68

We take the convention that∏j=k
j=i = 1 if i > k. If we extract the dk ∗ T factors, the
double sum can be rewritten
+d2 ∗ T ∗[Sn ∗
j=n∏
j=3
Nj + ...+ S4 ∗j=4∏
j=3
Nj + S3 ∗j=3∏
j=3
Nj + S2 ∗j=2∏
j=3
Nj
]
−d2 ∗ T ∗[Sn ∗
j=n−1∏
j=3
Nj + ...+ S4 ∗j=3∏
j=3
Nj + S3 ∗j=2∏
j=3
Nj
]
+d3 ∗ T ∗[Sn ∗
j=n∏
j=4
Nj + ...+ S4 ∗j=4∏
j=4
Nj + S3 ∗j=3∏
j=4
Nj
]
−d3T ∗[Sn ∗
j=n−1∏
j=4
Nj + ...+ S4 ∗j=3∏
j=4
Nj
]
+d4 ∗ T ∗[Sn ∗
j=n∏
j=5
Nj + ...+ S4 ∗j=4∏
j=5
Nj
]
−d4 ∗ T ∗[Sn ∗
j=n−1∏
j=5
Nj + ...
]
+...
+dn ∗ T ∗[Sn ∗
j=n∏
j=n+1
Nj
]
By collapsing the Si ∗ T terms, it is equal to:
S2 ∗ T ∗ [d2]
+S3 ∗ T ∗ [d2 ∗ (N3 − 1) + d3]
+S4 ∗ T ∗ [d2 ∗N3 ∗ (N4 − 1) + d3 ∗ (N4 − 1) + d4]
+...
+Sn ∗ T ∗[d2 ∗ (Nn − 1) ∗
j=n−1∏
j=3
Nj + d3 ∗ (Nn − 1) ∗j=n−1∏
j=4
Nj + ...+ dn
]
which can be rewritten:
S2 ∗ d2 ∗ T
+i=n∑
i=3
Si ∗ T ∗[d2 ∗ (Ni − 1) ∗
j=i−1∏
j=3
Nj + di + (Ni − 1) ∗k=i−1∑
k=3
dk ∗j=i−1∏
j=k+1
Nj
]
69

Because dk ≥ −|dk|, we have the lower bound:
k=n∑
k=2
dk ∗ timeLk ≥ S2 ∗ d2 ∗ T +i=n∑
i=3
Si ∗ T ∗ Ai (3.38)
where
Ai =
[d2 ∗ (Ni − 1) ∗
j=i−1∏
j=3
Nj − |di| − (Ni − 1) ∗k=i−1∑
k=3
|dk| ∗j=i−1∏
j=k+1
Nj
]
We now need to prove that Ai is always positive. We proceed by recurrence and
first prove it is true if i = 3. Because |d3| ≤ N3 − 1 and then because N3 > 0 and
d2 > 0, we have:A3 = d2 ∗ (N3 − 1)− |d3| ≥ (d2 − 1) ∗ (N3 − 1) ≥ 0. Therefore
Ai is positive for i = 3. We now assume that Ai ≥ 0. Let us prove that Ai+1 is also
positive:
Ai+1 = d2 ∗ (Ni+1 − 1) ∗j=i∏
j=3
Nj − |di+1| − (Ni+1 − 1) ∗k=i∑
k=3
|dk| ∗j=i∏
j=k+1
Nj
= −|di+1|+ (Ni+1 − 1) ∗[d2 −
k=i∑
k=3
|dk| ∗j=i∏
j=k+1
Nj
]
= −|di+1|+ (Ni+1 − 1) ∗[(
d2 ∗ (Ni − 1) ∗j=i−1∏
j=3
Nj + d2 ∗j=i−1∏
j=3
Nj
)
−(|di|+
k=i−1∑
k=3
|dk| ∗j=i∏
j=k+1
Nj
)]
= −|di+1|+ (Ni+1 − 1) ∗[(
d2 ∗ (Ni − 1) ∗j=i−1∏
j=3
Nj + d2 ∗j=i−1∏
j=3
Nj
)
−(|di|+ (Ni − 1) ∗
k=i−1∑
k=3
|dk| ∗j=i−1∏
j=k+1
Nj +k=i−1∑
k=3
|dk| ∗j=i−1∏
j=k+1
Nj
)]
The term Ai appears in the equation. Because Ai ≥ 0, Ai + 1 is minored by:
(Ni+1 − 1) ∗[d2 ∗
j=i−1∏
j=3
Nj −k=i−1∑
k=3
|dk| ∗j=i−1∏
j=k+1
Nj
]− |di+1|
70

Since |dk| ≤ Nk − 1, we can continue:
Ai+1 ≥ (Ni+1 − 1) ∗[d2 ∗
j=i−1∏
j=3
Nj −k=i−1∑
k=3
|dk| ∗j=i−1∏
j=k+1
Nj
]− |di+1|
≥ (Ni+1 − 1) ∗[d2 ∗
j=i−1∏
j=3
Nj −k=i−1∑
k=3
(Nk − 1) ∗j=i−1∏
j=k+1
Nj
]− |di+1|
≥ (Ni+1 − 1) ∗[d2 ∗
j=i−1∏
j=3
Nj −k=i−1∑
k=3
j=i−1∏
j=k
Nj +k=i−1∑
k=3
j=i−1∏
j=k+1
Nj
]− |di+1|
≥ (Ni+1 − 1) ∗[d2 ∗
j=i−1∏
j=3
Nj −k=i−1∑
k=3
j=i−1∏
j=k
Nj +k=i∑
k=4
j=i−1∏
j=k
Nj
]− |di+1|
≥ (Ni+1 − 1) ∗[d2 ∗
j=i−1∏
j=3
Nj −j=i−1∏
j=3
Nj + 1
]− |di+1| by elimination
≥ (Ni+1 − 1) ∗ (d2 − 1) ∗j=i−1∏
j=3
Nj + (Ni+1 − 1− |di+1|)
≥ (Ni+1 − 1) ∗ (d2 − 1) ∗j=i−1∏
j=3
Nj because |di+1| ≤ Ni+1 − 1
≥ 0 because d2 ≥ 0,j=i−1∏
j=3
Nj ≥ 1, and Ni+1 ≥ 1
Therefore Ai+1 is also positive. Using the recurrence principle, we prove that Ai ≥0 for every value of i ≥ 3. And therefore, thanks to Equation 3.38 and because
d2 ≥ 0, we have:
k=n∑
k=2
dk ∗ timeLk ≥ S2 ∗ T (3.39)
Then we have to prove that the term 3.35 is positive for the positive dependences
as well. Several cases arise depending on the values of i2, ..., in. Unlike with zero
dependencies, because (d2, ..., dn) 6= (0, ..., 0), some cases are impossible.
71

– If (i2 + d2, ..., in + dn) < (N2 − 1, ..., Nn − 1), (i2, ..., in) = (0, ..., 0), and
stage(op1) < fn, then (i1 + d1)− (i1 + stage(op1)− fn + 1) ≥ 0. Therefore:
pushdiff =
⌊i1 + d1
Sn
⌋−max
(0,
⌊i1 + stage(op1)− fn + 1
Sn
⌋)≥ 0
– If (i2 + d2, ..., in + dn) = (N2 − 1, ..., Nn − 1), (i2, ..., in) 6= (0, ..., 0), and
stage(op2) > ln, then (i1 + d1 + stage(op2)− ln)− (i1) ≥ 0. Therefore:
pushdiff = min
(⌊N1
Sn
⌋,
⌊i1 + d1 + stage(op2)− ln
Sn
⌋)−⌊i1Sn
⌋≥ 0
– If (i2 + d2, ..., in + dn) = (N2 − 1, ..., Nn − 1), (i2, ..., in) = (0, ..., 0),
stage(op2) > ln, and stage(op1) < fn, then (i1 + d1 + stage(op2) − ln) −(i1 + stage(op1)− fn) ≥ 0. Therefore:
pushdiff = min
(⌊N1
Sn
⌋,
⌊i1 + d1 + stage(op2)− ln
Sn
⌋)
−max(
0,
⌊i1 + stage(op1)− fn + 1
Sn
⌋)≥ 0
– For every other legal cases, we have:
pushdiff =
⌊i1 + d1
Sn
⌋−⌊i1Sn
⌋≥ 0
Therefore, in every case, Equation 3.36 is verified. By adding the results from
Equations 3.39 and 3.37, we prove that for every positive dependence from op1 to
op2, the dependence is respected in the final schedule, i.e. :
f(op2,−→I +−→d )− f(op1,
−→I ) ≥ δ
We proved that dependences, both zero and positive dependences, are always hon-
ored in the final schedule. The only point that remains to be proven is that the same
hardware resource is never used more than once in any given cycle of the final schedule.
Unfortunately, the full proof becomes rather complex and we will simply assume that the
resource constraints are respected. �
72

3.6.3 Imperfect Loop Nests & Multiple Initiation Intervals
In the case of multiple initiation intervals, the schedule function becomes more
difficult to compute. Indeed, the same stage has different execution times depending
on its iteration index within the outermost iteration. However, the construction of the
schedule itself remains doable. First one shall take the schedule function with single
initiation interval, and then remove the cycles in the final schedule that only corresponds
to the unused slots of the kernel.
Intuitively, because the dependence and sequential constraints take into account
the unused cycles, all the dependences, both positive and zero, will be respected as well.
Also, because the final schedule can be seen as the final schedule with a single initiation
interval T1 to which the empty cycles have been removed, the resource constraints are
also respected. Therefore the final schedule with multiple initiation intervals is correct.
3.7 Experimental Results
The SSP theory was implemented in the Open64 compiler framework. Every step
described earlier was added in the compiler back-end when the intermediate represen-
tation has been lowered to the assembly code level, before register allocation. Multi-
dimensional dependences were obtained much earlier in the compilation process and spe-
cial caution was taken to keep track of them during the multiple optimizations taking
place between then and the SSP phase.
Several benchmarks were then considered and SSP was compared to MS. The
benchmarks and the execution time results are described in the next sections. The impact
of loop tiling and unroll-and-jam is also measured. To help understand why SSP performs
better than MS in most situations, an analysis of the cache misses is also presented.
3.7.1 Benchmarks
Two sets of benchmarks from scientific applications were used for those experi-
ments. The first set includes SSP-amenable loop nests from the Livermore benchmark
73

suite: matrix multiply (MM) and 2-D hydrodynamics (HD) of depths 3 and 2 respec-
tively. For MM, every possible combination of loop interchange [AK84] was applied
leading to 6 variants dubbed ijk, ikj, jik, jki, kij, kji. Different input sizes were used for
our experiments.
The second set are 9 critical loop nests from the floating-point SPEC2000 bench-
mark suite. Only loop nests that could be software pipelined with SSP, i.e. with no
sibling loops, function call, or conditional statement, were retained. The loop nests come
from the 168.upwise, 171.swim, 173.applu, 301.apsi applications. The loop nests were
extracted from the original benchmark and compiled with our modified Open64 compiler.
A function call was inserted instead to execute the software-pipelined loop nest.
3.7.2 Execution Time
The execution time of the loop nests software pipelined with SSP and MS were
compared. The speedup curves of SSP vs. MS for the Livermore kernels are shown in
Figure 3.26. There is a curve or bar for each loop level used for SSP. The tests were
conducted for input size between 100 and 1000, in 100 increments for MM and HD, so
that the input data fit into the cache of the target machine. For larger sizes loop nest
transformations are required to minimize cache misses and were not the topic of this
research.
For MM, SSP can always outperform MS if the correct loop level is selected.
In every variant of MM, it is beneficial to software pipeline either the outermost or the
middle loop of the loop nest. For the ijk and jik variants, the innermost level is constrained
by a recurrence cycle which limits the performance of MS. The difference becomes more
important as the input size increases. For the ikj and jki variants, the limited data reuse
potential of one the operands of the matrix multiplication prevents MS from running
efficiently. By software pipelining the outermost loop, such limitation is avoided. For the
kij and kji, each loop level is limited either by lack of parallelism or by poor data reuse
potential. However, even then, SSP outperforms MS when applied to the middle loop
74

0
1
2
3
4
5
6
100 200 300 400 500 600 700 800 900 1000
Spee
dup
Matrix Size
MSSSP L3SSP L2SSP L1
(a) ijk variant
0
1
2
3
4
5
6
100 200 300 400 500 600 700 800 900 1000
Spee
dup
Matrix Size
MSSSP L3SSP L2SSP L1
(b) ikj variant
0
1
2
3
4
5
6
100 200 300 400 500 600 700 800 900 1000
Spee
dup
Matrix Size
MSSSP L3SSP L2SSP L1
(c) jik variant
0
1
2
3
4
5
6
100 200 300 400 500 600 700 800 900 1000
Spee
dup
Matrix Size
MSSSP L3SSP L2SSP L1
(d) jki variant
0
1
2
3
4
5
6
100 200 300 400 500 600 700 800 900 1000
Spee
dup
Matrix Size
MSSSP L3SSP L2SSP L1
(e) kij variant
0
1
2
3
4
5
6
100 200 300 400 500 600 700 800 900 1000
Spee
dup
Matrix Size
MSSSP L3SSP L2SSP L1
(f) kji variant
Figure 3.26: Matrix Multiply Speedups
75

level. For every variant, MS execution time is equivalent to the execution of SSP applied
to the innermost loop.
0.8
1
1.2
1.4
1.6
1.8
100 200 300 400 500 600 700 800 900 1000
Spee
dup
Matrix Size
MSSSP L2SSP L1
Figure 3.27: HD Benchmark Speedup
For HD, there is no recurrence at any loop level. Therefore only data reuse influ-
ences the performance of the schedule. While the input size remains below 600, software
pipelining the outermost loop brings the best performance. Above 600, the innermost
loop makes more sense. Again the performance of SSP applied to the innermost loop is
equivalent to MS.
For the SPEC benchmarks (Figure 3.28), results vary on the benchmark going
from a speedup of 60% for the outermost loop of the second 171.swim loop nest to 410%
for the outermost loop of the second 173.applu loop nest, depending on data locality
properties and recurrence cycles in the dependence graphs. The results show that is not
always beneficial to schedule the outer loops and care should be taken during the loop
selection phase to choose the most effective level.
Overall, the results show that SSP can often outperform MS if the proper loop
level is selected. In the worst-case scenario, the innermost loop can always be chosen
where SSP is equivalent to MS as proved earlier and as showed by our experimental
results (speedup of 1 when the innermost loop is chosen).
76
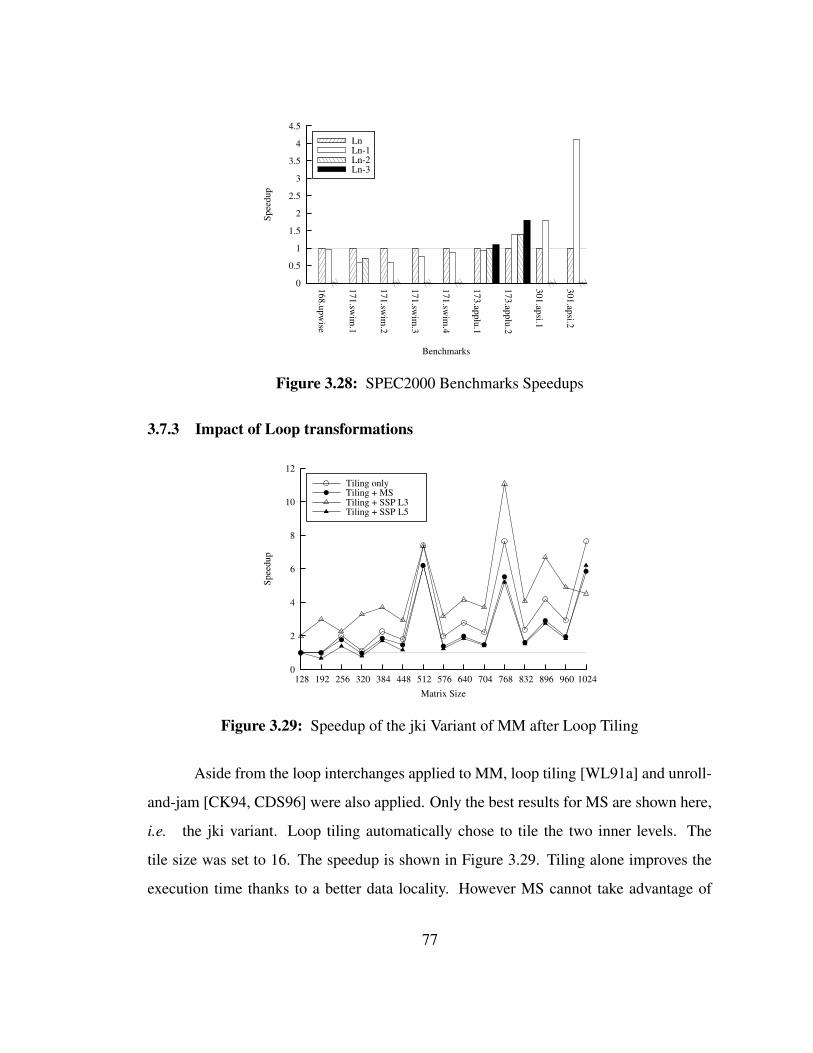
0
0.5
1
1.5
2
2.5
3
3.5
4
4.5
301.apsi.2
301.apsi.1
173.applu.2
173.applu.1
171.swim
.4
171.swim
.3
171.swim
.2
171.swim
.1
168.upwise
Spee
dup
Benchmarks
LnLn-1Ln-2Ln-3
Figure 3.28: SPEC2000 Benchmarks Speedups
3.7.3 Impact of Loop transformations
0
2
4
6
8
10
12
128 192 256 320 384 448 512 576 640 704 768 832 896 960 1024
Spee
dup
Matrix Size
Tiling onlyTiling + MSTiling + SSP L3Tiling + SSP L5
Figure 3.29: Speedup of the jki Variant of MM after Loop Tiling
Aside from the loop interchanges applied to MM, loop tiling [WL91a] and unroll-
and-jam [CK94, CDS96] were also applied. Only the best results for MS are shown here,
i.e. the jki variant. Loop tiling automatically chose to tile the two inner levels. The
tile size was set to 16. The speedup is shown in Figure 3.29. Tiling alone improves the
execution time thanks to a better data locality. However MS cannot take advantage of
77

it and the performance decreases by 38% when MS is used whereas SSP, applied to the
middle (L3 after loop tiling), benefits from the tiling. The reason for such a difference is
the cost of the prolog and epilog induced by the loop tiling. Because several iterations are
scheduled in the same group, the SSP schedule can amortize such a cost.
0
1
2
3
4
5
64 128 192 256 320 384 448 512 576 640 704 768 832 896 960 1024
Spee
dup
Matrix Size
U&J onlyU&J + MSU&J + SSP L3U&J + SSP L5
Figure 3.30: Speedup of the jki Variant of MM after Unroll-and-Jam
Unroll-and-Jam applied to the same variant of MM in Figure 3.30 has the same
impact. The transformation was applied on the already loop tiled code, which is used as
a reference for the speedup curves. The optimization alone brings a performance boost,
which is decreased by MS but amplified with SSP at both the L3 and L5 levels.
Both transformations increase the depth of the loop nest and decrease the number
of iterations of the innermost loop. Therefore the relative execution time of the prolog
and epilog at the innermost level becomes more important. However, because SSP can be
applied to other levels than the innermost, this limitation does not exist and SSP schedules
can take advantage of both transformations.
3.7.4 Cache Misses Analysis
In this section, we consider the cache misses to help explain further the previous
results. Because our loop nests come from scientific applications rich in floating-point
78

0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
U&J jkitiled jkikjikijjkijikikjijk
Rel
ativ
e C
ache
Mis
ses
Benchmarks
MSSSP L1SSP L2SSP L3SSP L5
(a) L2 Cache Misses
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
U&J jkitiled jkikjikijjkijikikjijk
Rel
ativ
e C
ache
Mis
ses
Benchmarks
MSSSP L1SSP L2SSP L3SSP L5
(b) L3 Cache Misses
Figure 3.31: Cache Misses Results for the MM Variants
79

operations and because floating-point values bypass the L1 cache in the Itanium archi-
tecture, only the L2 and L3 cache misses are of interest. The L1 cache misses are only
due to instruction cache misses. The L2 and L3 cache misses results are shown for all the
variants of MM in Figures 3.31(a) and 3.31(b) respectively.
Overall, without any form of tiling, SSP has no negative impact on the number of
cache misses. Every time SSP is applied to the outermost loop, they are even lowered,
which would explain the better execution times. With loop tiling and unroll-and-jam,
it is however not the case. Indeed the grouping of iterations in SSP induces some data
requests that are different from what both optimizations had anticipated. However the
quality of the SSP schedules and the higher level of instruction-level parallelism offsets
such a drawback. Also, not every cache miss results in a pipeline stall. The study of the
relationship between tile size and group size in SSP is left for further research however.
It is very likely that such research will lead to different solutions than MS because of the
different memory access patterns of the SSP schedules.
3.8 Related Work
3.8.1 Hierarchical Scheduling
Lam [Lam88] proposed using hierarchical scheduling to software-pipeline loop
nests. The innermost loop is first software-pipelined and then considered as a single
operation when software-pipelining the second loop in the nest. As opposed to Wood’s
work [Woo79], the already software-pipelined loop is not a black box and other operations
can be scheduled in the same cycle as long as resource and dependence constraints are
honored. The main limitation is the fact that the inner loops must be software-pipelined
first. The scheduler might run out of resources very quickly or earlier decisions made
for the inner loop might prevent getting the most out of the outer loops. An example is
shown in Figure 3.32. The innermost loop is software pipelined first. Then, the software
pipelined instructions formed a virtual instruction that is used to software pipeline the
outermost loop. Operation op1 now overlaps the instruction blocks and the loop nest takes
80
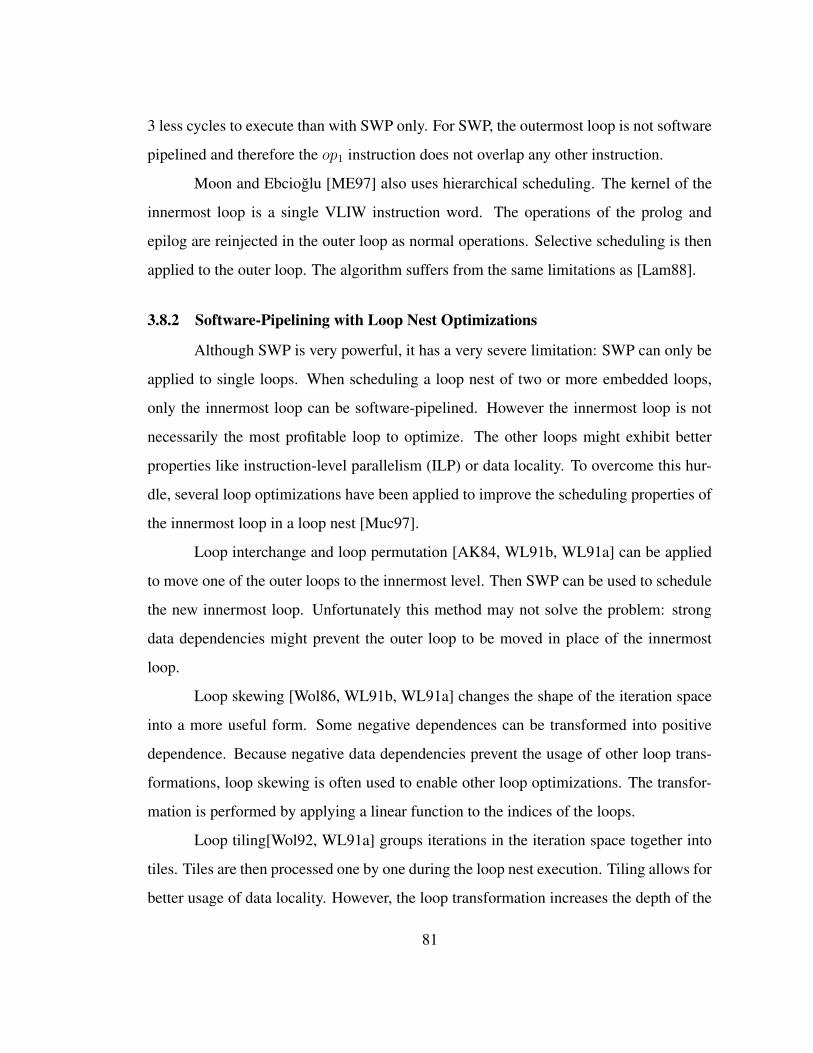
3 less cycles to execute than with SWP only. For SWP, the outermost loop is not software
pipelined and therefore the op1 instruction does not overlap any other instruction.
Moon and Ebcioglu [ME97] also uses hierarchical scheduling. The kernel of the
innermost loop is a single VLIW instruction word. The operations of the prolog and
epilog are reinjected in the outer loop as normal operations. Selective scheduling is then
applied to the outer loop. The algorithm suffers from the same limitations as [Lam88].
3.8.2 Software-Pipelining with Loop Nest Optimizations
Although SWP is very powerful, it has a very severe limitation: SWP can only be
applied to single loops. When scheduling a loop nest of two or more embedded loops,
only the innermost loop can be software-pipelined. However the innermost loop is not
necessarily the most profitable loop to optimize. The other loops might exhibit better
properties like instruction-level parallelism (ILP) or data locality. To overcome this hur-
dle, several loop optimizations have been applied to improve the scheduling properties of
the innermost loop in a loop nest [Muc97].
Loop interchange and loop permutation [AK84, WL91b, WL91a] can be applied
to move one of the outer loops to the innermost level. Then SWP can be used to schedule
the new innermost loop. Unfortunately this method may not solve the problem: strong
data dependencies might prevent the outer loop to be moved in place of the innermost
loop.
Loop skewing [Wol86, WL91b, WL91a] changes the shape of the iteration space
into a more useful form. Some negative dependences can be transformed into positive
dependence. Because negative data dependencies prevent the usage of other loop trans-
formations, loop skewing is often used to enable other loop optimizations. The transfor-
mation is performed by applying a linear function to the indices of the loops.
Loop tiling[Wol92, WL91a] groups iterations in the iteration space together into
tiles. Tiles are then processed one by one during the loop nest execution. Tiling allows for
better usage of data locality. However, the loop transformation increases the depth of the
81
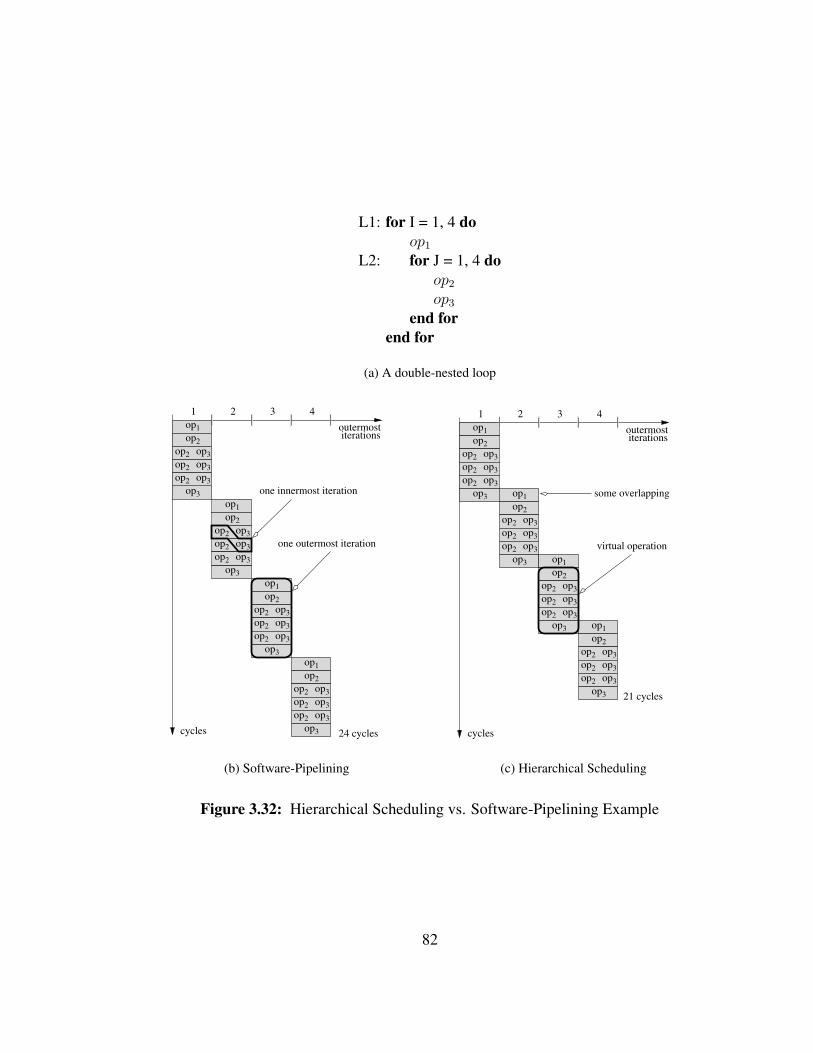
L1: for I = 1, 4 doop1
L2: for J = 1, 4 doop2
op3
end forend for
(a) A double-nested loop
cycles 24 cycles
iterations
1 2 3 4
one innermost iteration
one outermost iteration
op1op2
op2 op3
op3
op2 op3op2 op3
op1op2
op2 op3
op3
op2 op3op2 op3
op1op2
op2 op3
op3
op2 op3op2 op3
op1op2
op2 op3
op3
op2 op3op2 op3
outermost
(b) Software-Pipelining
cycles
iterations
21 cycles
1 2 3 4
virtual operation
some overlapping
op1op2
op2 op3
op3
op2 op3op2 op3
op1op2
op2 op3
op3
op2 op3op2 op3
op1op2
op2 op3
op3
op2 op3op2 op3
op1op2
op2 op3
op3
op2 op3op2 op3
outermost
(c) Hierarchical Scheduling
Figure 3.32: Hierarchical Scheduling vs. Software-Pipelining Example
82
loop nest and the overall cost of loop control overheads. Moreover, finding the optimal
tile size remains a challenge, and performance of tiled loop nests quickly decreases if the
tile size is not carefully chosen.
Loop unrolling [DH79, Sar00] duplicates the body of the innermost loop by a
given unrolling factor n and divides the total number of iterations of the innermost loop
by n. Hopefully, the instruction-level parallelism of the innermost loop is increased.
The scheduler then has more opportunities to efficiently schedule the innermost loop.
Unfortunately loop unrolling multiplies the code size of the innermost loop by a factor of
n. Also, good heuristics must be used to choose the unrolling factor.
Unroll-and-jam [CCK88, CK94, CDS96] is a generalization of loop unrolling for
outer loops in a loop nest. The chosen loop level is unrolled and the inner loops are
duplicated and fused (or jammed) together. The inner loop body is therefore duplicated
as many times as the the outer loop was unrolled. The transformation is useful when the
innermost loop shows poor instruction-level parallelism and strong data dependencies.
Instead of running innermost iterations in parallel, outermost iterations are processed.
Loop unroll-and-squash [PHA02] is a code-size optimized version of loop unroll-
and-jam. There is only one copy of the inner loop body. Some register renaming tech-
niques and register copy instructions are used to preserve the correctness of the code.
A direct consequence is a reduction in code size and a better usage of the available re-
sources. The major drawback is an increase of dependences limiting the efficiency of the
SWP scheduling algorithm used afterwards.
Software thread-integration [SD05] jams procedures together to improve the
instruction-level parallelism of the code. The method can be extended to loop nests us-
ing Deep Jam [CCJ05] to generalize unroll-and-jam which brings together independent
instructions across control structures and removed memory-based dependences.
83

3.8.3 Loop Nest Linear Scheduling
Darte et al [DSRV99, DSRV02] proposed a theoretical method to enumerate all
the tight schedules for a loop nest on a given clustered processor. A tight schedule is a
schedule that fully utilizes the resources of the processor without overloading any proces-
sor. The solution is a linear schedule: the schedule time and the processor to which each
operation is assigned is a linear function of the loop indexes.
The method is theoretical and mainly used to synthesize specialized co-processors
for application-specific hardware. Therefore all hardware constraints are either not men-
tioned (such as register allocation) or solved using ad-hoc hardware solutions (loop con-
trol overheads for instance). Also the method is limited to perfect loop nests only and a
cluster of processors can only handle one iteration each cycle.
84
Chapter 4
LOOP SELECTION
The loop selection step determines which loop level will be software pipelined by
SSP. The intent is to find the most profitable loop level, where the profitability is deter-
mined by the user. For instance, the user might be interested into minimizing the power
consumption of the processor during the execution of the loop nest, or into minimizing
the execution time of the loop nest. Although loop selection heuristics are left for future
work, the computation of two important factors are presented in this chapter, both aimed
at minimizing the execution time. The first factor is the initiation interval of the selected
loop level, the second the number of cache misses.
Another factor is the number of iterations of the selected loop level. If too low, the
cost of filling and emptying the pipeline cannot be amortized. Therefore loop levels with
a low number of iterations should be avoided. The exact number depends on the target
processor.
4.1 Initiation Interval
Given a loop level, a lower initiation interval is synonymous with shorter execution
time. Indeed, if the outermost iterations are issued more often, the schedule will terminate
earlier. It is therefore important to minimize the initiation interval.
However, to compare the execution time of the entire loop nest, the initiation inter-
val of different loop levels cannot be compared with each other. The number of iterations
of each loop level and the scheduling method used for the enclosing loops not selected
for software-pipelining need to be taken into account.
85

We present here a method to compute the minimum initiation interval (MII) of a
given loop level. The method is the method used in modulo-scheduling but applied to the
1-D DDG instead of the DDG of the innermost loop.
Two types of constraints prevent the iterations of the selected loop level from be-
ing fully parallelized. The first constraint is the dependences between operations from
different iterations. The corresponding MII is named recurrence minimum initiation in-
terval (recMII). The second constraint is the number of operations that can be executed
at the same time by the target architecture. The related MII is referred as the resource
minimum initiation interval (resMII). The method to compute resMII and recMII is
described below. MII is then equal to:
MII = max(recMII, resMII) (4.1)
4.1.1 Recurrence Minimum Initiation Interval
Given the 1-D DDG of the selected loop level, recMII can be computed directly
using the following formula:
recMII = maxcycle C
δ(C)
d(C)(4.2)
where: C is a cycle in the 1-D DDG
δ(C) is the sum of the latencies of the arcs in C
d(c) is the sum of the distances of the arcs in C
Positive dependences, which are taken care of by the sequential constraint, have
no influence on recMII . Indeed, positive dependences increase the length of the 1-D
schedule (S ∗T ), by adding extra empty stages when necessary. But the initiation interval
remains constant.
86

4.1.2 Resource Minimum Initiation Interval
In the context of pipelined function units, resMII is computed for each type of
resource such integer function units, floating-point function units,...
resMII = maxresource type R
number of operations using Rnumber of resources of type R
(4.3)
For non-pipelined function units, the reader is referred to [GAG96].
4.2 Memory Accesses
The number of memory accesses per iteration can be approximated. As a rule of
thumb, if the number of memory accesses per iteration is limited, the schedule is less
likely to create cache misses and more likely to use values in registers instead. It is
therefore interesting to evaluate such factor when deciding which loop level should be
selected.
The number of memory accesses per iteration point is approximated by consider-
ing the first single scheduling group of Sn outermost iterations. Within that group, we
consider the first Sn successive slices. The iteration space is then defined by the iteration
points of the form (i1, ..., in) where 0 ≤ i1, in ≤ Sn − 1. It corresponds to a SnXSn
square in the original iteration space. The square is representative of the references that
occur normally in the SSP schedule as most of the time is spent in the innermost loops
while Sn outermost iterations are executed in parallel. The set of iteration points can be
abstracted as a localized vector space [WL91a] α = span{(1, 0, ..., 0), (0, ..., 0, 1)}.The problem can now be applied to the memory access formulation in [WL91a].
Using the same notations and definitions, we can derive the number of memory accesses
per iteration point in the square iteration space. For an uniformly generated set in this
localized space, let RST and RSS be the self-temporal and self-spatial reuse vectors, re-
spectively. Let gT and gS be the number of group-spatial equivalent classes. Then, for
the uniformly generated set, the number of memory accesses per iteration is equal to:
gS + gT−gSl
le ∗ SdimRSS ∩ α(4.4)
87

where:
l is the cache line size
e =
0 if RST ∩ α = RSS ∩ α1 otherwise
The total number of memory accesses per iteration point is then the sum of the memory
accesses per iteration point for each uniformly generated set.
88

Chapter 5
SCHEDULER
5.1 Introduction
In this chapter, we present solutions to the SSP kernel generation problem. The
kernel is generated after the loop selection and data dependence graph simplification steps
(Figure 3.6). The input data are the 1-D DDG and the set of loop nest operations to sched-
ule. The output is the 1-D schedule. Generating kernels is not a simple task - as it involves
the overlapping of operations from several iteration levels (dimensions) of a loop nest, a
challenge not encountered in traditional software pipelining. In SSP kernels, there is one
subkernel per loop level in the loop nest, each one with its own initiation interval. Those
subkernels interact with each other and optimizing one subkernel could have a negative
impact on the others. Moreover, when the scheduler fails and the initiation interval must
be increased, which subkernel should be chosen? The challenge is to generate a kernel
that will, at the same time, minimize the execution time of the final multi-dimensional
schedule.
Three approaches are proposed and studied. First, the level-by-level approach
schedules the subkernel one by one starting from the innermost. Once a subkernel has
been scheduled, it cannot be undone. Second, the flat approach does not lock a subkernel
once fully scheduled. Operations from any loop level may be considered and undo pre-
vious decisions made in a different subkernel. A larger solution space can therefore be
explored. Finally, the hybrid approach schedules the innermost subkernel first and locks
it. The other operations are then scheduled using the flat method. It allows for a shorter
89

compilation time than the fast method while exploring a large solution space and focusing
resources on the innermost loop.
The proposed approaches and heuristics associated with them have been imple-
mented in the Open64/ORC compiler and analyzed on loop nests from the Livermore,
SPEC2000, and NAS benchmarks. Experimental results show that the hybrid approach
avoids the pitfalls of the two other approaches and produces schedules on average twice
faster than modulo-scheduling schedules. Because of its large search space, the flat ap-
proach may not reach a good solution fast enough and showed poor results.
The rest of the chapter is organized as follows. In the next section, the SSP kernel
generation problem for SSP, along with the associated issues, is explained. Section 5.3
presents the scheduling methods in detail. The last three sections are devoted toward
experimental results, related work, and conclusion, respectively.
5.2 Problem Description
5.2.1 Problem Statement
The kernel generation step consists of computing a one-dimensional schedule for
the loop nests. Using the 1-D DDG, each operation is assigned a schedule time. That
time is the schedule of the first instance of the operation in the final schedule. Given an
operation op, its 1-D schedule time, i.e. its final schedule time of its outermost iteration
0 instance, is noted σ(op, 0).
The schedule time of the operations must obey the constraints presented in Sec-
tion 3.5 and shown in Figure 5.1 where the UnusedCycles function is defined as fol-
lows. Let p1 and p2 be the stage index of operations op1 and op2, respectively. If
σ(op1, 0) ≤ σ(op2, 0) and p1 = p2, then
UnusedCycles(op1, op2, k) = k ∗s=S−1∑
s=0
(T − Tlevel(s)) (5.4)
90

• Modulo Property:
σ(op, i1 + 1) = σ(op, i1) + T (5.1)
• Dependence Constraints:
σ(op1, i1) + δ ≤ σ(op2, i1 + k)− UnusedCycles(op1, op2, k) (5.2)
for all the dependences from the 1-D DDG from op1 to op2 where δ is thelatency of the dependence and k the distance.
• Resource Constraints:
At any given cycle of the 1-D schedule, a hardware resource is not allocatedto more than one operation.
• Sequential Constraints:
σ(op, 0) + δ ≤ Sp ∗ Tn (5.3)
for every positive dependence−→d = (d1, ..., dn) originating from op in the
original n-D DDG and where dp is the first non-null element in the subvector(d2, ..., dn).
• Innermost Level Separation Constraint:
Only operations from the innermost loop can be scheduled in the innermoststages.
Figure 5.1: 1-D Schedule Constraints in the Case of Imperfect Loop Nests and MultipleInitiation Intervals
91

If σ(op1, 0) ≤ σ(op2, 0) and p1 < p2, then
UnusedCycles(op1, op2, k) =
s=p2−1∑
s=p1+1
(T − Tlevel(s)) + Tblevel(p2) + Talevel(p1)
+k ∗s=S−1∑
s=0
(T − Tlevel(s)) (5.5)
Otherwise, if σ(op1, 0) > σ(op2, 0), the function is defined as:
UnusedCycles(op1, op2, k) =s=S−1∑
s=p1+1
(T − Tlevel(s)) +
s=p2−1∑
s=0
(T − Tlevel(s))
+Tblevel(p2) + Talevel(p1)
+k ∗s=S−1∑
s=0
(T − Tlevel(s)) (5.6)
The SSP kernel generation problem can then be formulated as follows: given a
set of loop nest operations and the associated 1-D DDG, schedule the operations so that
the scheduling constraints are honored and the initiation interval of each subkernel is
minimized. Even in the simplest case, where the loop nest is a single loop, the problem is
NP-hard [Woo79].
5.2.2 Issues
The kernel generation problem raises several challenges. First, the scheduling
constraints must be honored. The difficulty resides in the constraints that did not exist
in modulo scheduling, namely the dependence constraints, the sequential constraints and
the innermost level separation constraints. As the kernel is being generated, its final
parameters are unknown until the scheduling is complete. Therefore, it is impossible to
know the number of stages per cycle until then. However, that number is required to be
able to honor the dependence constraints and the innermost level separation constraint.
Second, unlike modulo scheduling, the kernel is composed of subkernels with
different initiation intervals which must be respected during the scheduling process. For
92

op1op2op3
op5op1
op2op3
op4op5place op4
op3 is ejectedinnermost II = 2
Figure 5.2: Strict Initiation Rate of Subkernels
instance, in Figure 5.2, the II of the innermost kernel is 2. When inserting op4, op3 must
be ejected to maintain the current II.
op1op2op3
op5 subkernelschedule
1 cycle later
truncated subkernel
op1op3
op2op5
Figure 5.3: Truncation of Subkernels
Also, the integrity of each subkernel must be guaranteed. If a subkernel is resched-
uled to a different cycle, one must make sure that that subkernel is not truncated as shown
in Figure 5.3
Finally, there is the problem of deciding which initiation interval to increment in
case the scheduler fails to find a solution with the given initiation intervals. In the single
loop case, the II of the loop was simply incremented. In the SSP case, we have the choice
between all the loops of the loop nests. A wrong decision can lead to a non-optimal
decision, as shown in the example in Figure 5.4(a), or might not even solve the problem
that lead to the scheduler failure, as shown in Figure 5.4(b).
5.3 Solution
5.3.1 Overview
The algorithm framework, shared by the three approaches, is derived from Huff’s
algorithm [AJLA95, Rau94, Huf93] and shown in Fig. 5.5. Starting with the initiation in-
tervals set to their respective minimum initiation interval value, the scheduler proceeds
as follows. The minimum legal scheduling distance (mindist) between any two de-
pendent operations is computed. Using the mindist information, the earliest and latest
93
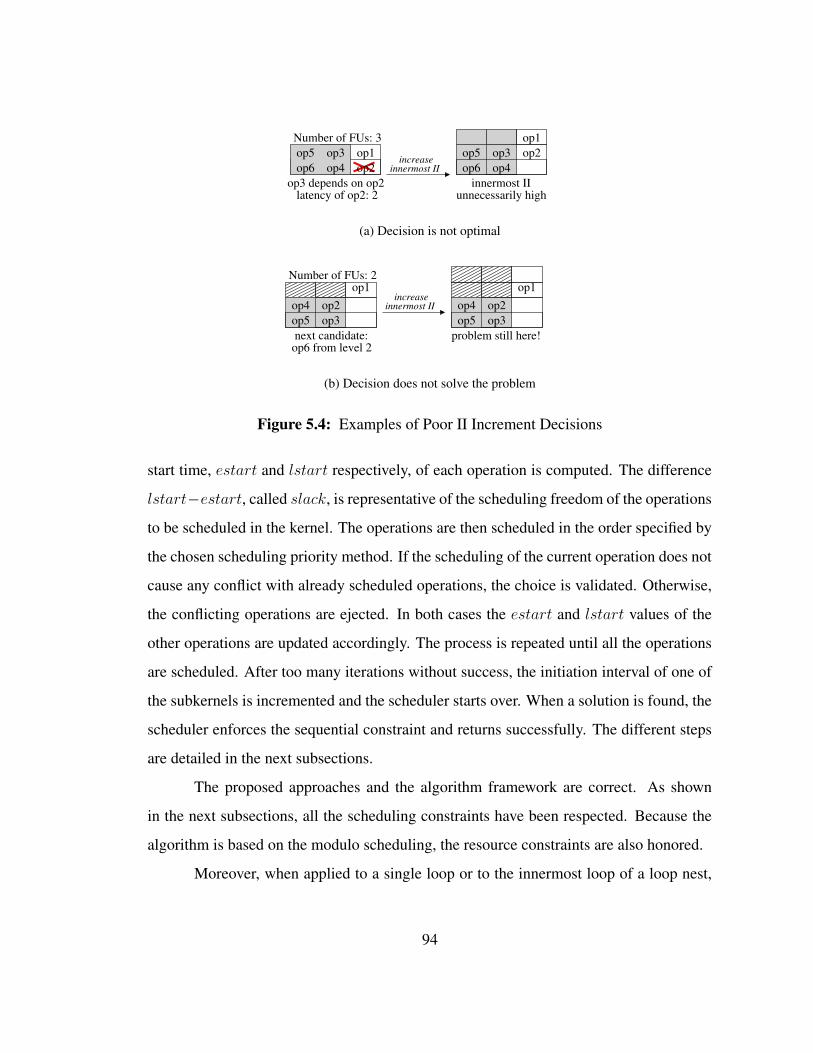
op3 depends on op2
Number of FUs: 3op3op4
op5op6
op1op2op1op3
op4op5op6 op2 innermost II
increase
innermost IIunnecessarily highlatency of op2: 2
(a) Decision is not optimal
next candidate:op6 from level 2
Number of FUs: 2
problem still here!
increaseinnermost IIop2
op3op4op5
op1op2op3
op4op5
op1
(b) Decision does not solve the problem
Figure 5.4: Examples of Poor II Increment Decisions
start time, estart and lstart respectively, of each operation is computed. The difference
lstart−estart, called slack, is representative of the scheduling freedom of the operations
to be scheduled in the kernel. The operations are then scheduled in the order specified by
the chosen scheduling priority method. If the scheduling of the current operation does not
cause any conflict with already scheduled operations, the choice is validated. Otherwise,
the conflicting operations are ejected. In both cases the estart and lstart values of the
other operations are updated accordingly. The process is repeated until all the operations
are scheduled. After too many iterations without success, the initiation interval of one of
the subkernels is incremented and the scheduler starts over. When a solution is found, the
scheduler enforces the sequential constraint and returns successfully. The different steps
are detailed in the next subsections.
The proposed approaches and the algorithm framework are correct. As shown
in the next subsections, all the scheduling constraints have been respected. Because the
algorithm is based on the modulo scheduling, the resource constraints are also honored.
Moreover, when applied to a single loop or to the innermost loop of a loop nest,
94

SSP SCHEDULER(approach, mii[], priority, ii incr method):for each loop level i do
set ii[i] to mii[i]end forattempts← 0while (attempts < max attempts) do
initialize mindist table, MRTcompute slack valuesplaced ops← 0while (placed ops < max placed ops) do
choose next operation op according to approach and priorityif no operation left then
enforce sequential constraintsreturn success
end ifschedule operation opplaced ops← placed ops+ 1eject operations violating resource constraints with opeject operations violating dependence constraints with opeject operations violating innermost level separation limitation with opupdate slack and MRT
end whilechoose level i to increase II according to ii incr methodii[i]← ii[i] + 1attempts← attempts+ 1
end whilereturn failure
Figure 5.5: Scheduling Framework
the method becomes the Huff’s modulo scheduling algorithm. Therefore, our method
subsumes modulo-scheduling as a special case.
5.3.2 Scheduling Approaches
5.3.2.1 Flat Approach
Three different scheduling approaches are proposed. Flat scheduling treats the
loop nest as if it were “flattened” as a single loop. When backtracking, conflicting op-
erations from all levels can be ejected from the schedule. The main advantage of this
approach is its flexibility. Early decisions can always be undone. Such flexibility leads
to a larger solution space, and potentially better schedules. On the down side, the search
space might become too large and the method too slow to find a schedule solution in time.
95

5.3.2.2 Level-by-Level Approach
With level-by-level scheduling, the operations are scheduled in the order of their
loop levels, starting from the innermost. Once all the operations of one level are sched-
uled, the entire schedule becomes a virtual operation from the point of view of the enclos-
ing level and the scheduler is called again for the next loop level. The virtual operation
acts as a white box both for dependences and resource usage. A direct property is that a
subkernel computed earlier cannot be undone through backtracking. The method has the
advantage of being relatively simple and fast. However, the early scheduling decisions
made in the inner loops might prevent the scheduler from reaching optimal solutions in
the outer levels. Figure 5.6 shows an example where the level-by-level scheduler is forced
to increase the initiation interval of the outer kernel to 3 in order to schedule op1, whereas
a flat scheduler can reschedule the inner operations in other scheduling cycles and produce
a final kernel with II = 2.
op2op3
op4
op2op3
op4 op1
op2op3
op4op1
op2op3
op4op1
innermost kernel(fixed)
resource conflictwith op2 and op4
latency conflictwith op2
final kernelII = 3
increase IIplace op1
(a) Level-by-Level Scheduling Solution
op1op2op3
op1op2op3
op1op2op3
op4 place op2 place op4
final kernelII = 2
resource conflicteject op2 and op4
op4
(b) Flat Scheduling Solution
Figure 5.6: Advantage of the Flat Approach over the Level-by-Level Approach
96

5.3.2.3 Hybrid Approach
The hybrid approach embeds the flat scheduling into a level-by-level framework.
The innermost level is scheduled first. Its kernel becomes a virtual operation and the flat
scheduling method is used for the other loop levels. The hybrid approach is intuitively a
good compromise between level-by-level and flat scheduling, as confirmed by the experi-
mental results. It can find better solutions than the level-by-level method without the high
compilation time.
5.3.3 Enforcement of the Scheduling Constraints
As the scheduling algorithm is based on Huff’s algorithm, the modulo property
and the resource constraints are naturally respected. The other constraints are also hon-
ored as explained in the following subsections.
5.3.3.1 Dependence Constraint
The dependence constraints are enforced through the mindist table. The min-
imum distance between operations op1 and op2, mindist(op1, op2), is the minimum
scheduling distance, σ(op2, 0) − σ(op1, 0), above which the dependence constraint be-
tween op1 and op2 is guaranteed to be respected. To compute the minimum distance
between two operations, we use the dependence constraint. If there is a dependence be-
tween two operations op1 and op2 with a latency of δ and a distance of k, then we must
have:
σ(op2, 0)− σ(op1, 0) ≥ δ − k ∗ T + UnusedCycles(op1, op2, k) (5.7)
Because the mindist value is statically computed once and for all before the oper-
ations are scheduled, we need to express the distance σ(op2, 0)−σ(op1, 0) independently
of the schedule time of op1 and op2. Since the exact value of UnusedCycles(op1, op2, k)
depends of those times, approximations must be made. A tight upper bound is presented
in Lemma 5.1.
97

Lemma 5.1[σ(op2, 0)− σ(op1, 0)
T+ (k + 1) ∗ S + 2
]∗ (T − Tn) (5.8)
is a tight upper bound of UnusedCycles(op1, op2, k).
Proof. We first prove that the value is an upper bound of UnusedCycles(op1, op2, k),
then that the bound is a tight bound. We will be using two properties:
T − Ti ≤ T − Tn ∀i ∈ [1, n] (5.9)
x− 1 < bxc ≤ x ∀x (5.10)
• If σ(op1, 0) ≤ σ(op2, 0) and p1 = p2, then
UnusedCycles(op1, op2, k)
= k ∗s=S−1∑
s=0
(T − Tlevel(s))
≤ k ∗s=S−1∑
s=0
(T − Tn), using 5.9
= (k ∗ S) ∗ (T − Tn)
• If σ(op1, 0) ≤ σ(op2, 0) and p1 < p2, then
UnusedCycles(op1, op2, k)
=
s=p2−1∑
s=p1+1
(T − Tlevel(s)) + Tblevel(p2) + Talevel(p1) + k ∗s=S−1∑
s=0
(T − Tlevel(s))
≤s=p2−1∑
s=p1+1
(T − Tn) + Tblevel(p2) + Talevel(p1) + k ∗s=S−1∑
s=0
(T − Tn), using 5.9
≤s=p2−1∑
s=p1+1
(T − Tn) + 2 ∗ (T − Tn) + k ∗s=S−1∑
s=0
(T − Tn), by def. of Ta/Tb
= [p2 − p1 + 1 + k ∗ S] ∗ (T − Tn)
=
[⌊σ(op2, 0)
T
⌋−⌊σ(op1, 0)
T
⌋+ k ∗ S + 1
]∗ (T − Tn), by definition of pi
≤[σ(op2, 0)− σ(op1, 0)
T+ k ∗ S + 2
]∗ (T − Tn), using 5.10
98

• If σ(op1, 0) > σ(op2, 0), then
UnusedCycles(op1, op2, k)
=s=S−1∑
s=p1+1
(T − Tlevel(s)) +
s=p2−1∑
s=0
(T − Tlevel(s)) + Tblevel(p2) + Talevel(p1)
+k ∗s=S−1∑
s=0
(T − Tlevel(s))
≤s=S−1∑
s=p1+1
(T − Tn) +
s=p2−1∑
s=0
(T − Tn) + Tblevel(p2) + Talevel(p1)
+k ∗s=S−1∑
s=0
(T − Tn), using 5.9
≤s=S−1∑
s=p1+1
(T − Tn) +
s=p2−1∑
s=0
(T − Tn) + 2 ∗ (T − Tn)
+k ∗s=S−1∑
s=0
(T − Tn), by definition of Tb/Ta
= [p2 − p1 + S + 1 + k ∗ S] ∗ (T − Tn)
=
[⌊σ(op2, 0)
T
⌋−⌊σ(op1, 0)
T
⌋+ (k + 1) ∗ S + 1
]∗ (T − Tn), by def. of pi
≤[σ(op2, 0)− σ(op1, 0)
T+ (k + 1) ∗ S + 2
]∗ (T − Tn), using 5.10
All of those bounds share (5.8) as a common upper bound. Consequently, the value (5.8)
is an upper bound to UnusedCycles(op1, op2, k). Moreover, if σ(op1, 0) < σ(op2, 0),
p1 = p2, k = 0, then UnusedCycles(op1, op2, k) is equal to that value. The upper bound
is therefore a tight upper bound. �Using Lemma 5.1, the dependence constraint is always verified if:
σ(op2, 0)− σ(op1, 0) ≥ δ − k ∗ T
+
[σ(op2, 0)− σ(op1, 0)
T+ (k + 1) ∗ S + 2
]∗ (T − Tn)
⇔ σ(op2, 0)− σ(op1, 0) ≥ T
Tn∗ [δ − k ∗ T + ((k + 1) ∗ S + 2) ∗ (T − Tn)]
99

empty
1KK2Kn
position of innerkernels may vary
length of schedulingblocks may vary
BEFOREAFTER INNERMOST
Figure 5.7: Scheduling Blocks Example
The scheduling distance between op1 and op2 is now bounded by a value in-
dependent from the schedule time of both operations. That value is used to initialize
mindist(op1, op2). By construction, it guarantees that the dependence constraint is al-
ways enforced.
5.3.3.2 Sequential Constraint
The sequential constraint is not enforced during the scheduling process, but as
a posteriori transformation once a schedule that satisfies all other constraints has been
found. The schedule is then scanned and the sequential constraint checked. If it is not
honored between two operations, empty stages are inserted in the schedule until it is
honored. The case occurs rarely enough to justify such a technique.
5.3.3.3 Innermost Level Separation Constraint
To enforce the innermost level separation limitation without any extra computation
cost, the schedule is conceptually split into three scheduling blocks: before, innermost
and after. Operations that lexically appear before ( or after, respectively) the innermost
loop are scheduled independently into the ’before’ (’after’) scheduling block as shown
in Figure 5.7. Innermost operations are scheduled into the ’innermost’ scheduling block.
Within each scheduling block, the length of the schedule may vary without breaking the
separation limitation and final length of the full schedule is only known at the very end.
The modulo resource reservation table is shared between the three blocks.
100

When an operation is scheduled or when an operation is ejected, the slack of de-
pendent operations must be recomputed. In modulo scheduling, such an update is incre-
mental and only operations that need it are updated. The SSP case is slightly different.
A dummy START and a dummy STOP operations are inserted and pre-scheduled at the
beginning and the end of each of the three scheduling blocks. If a dummy operation of
one block is ejected and rescheduled, because the distance between operations are related
with the length of each block, the slack of every operation within this block has to be
recomputed.
5.3.4 Subkernels Integrity
In the flat approach, the initiation intervals are enforced by scheduling the opera-
tions first within the current boundaries of their respective subkernel. If impossible, the
operation is scheduled at some other cycle. The subkernel boundaries are then moved cor-
respondingly. All the operations that are not scheduled within those boundaries anymore
are ejected. In the level-by-level approach, the problem never arises as the subkernels are
scheduled separately.
In the level-by-level approach, the truncation of subkernels is prevented by mark-
ing as off-limit the cycles that would lead to the truncation of a subkernel. With the flat
approach, the problem does not exist because the subkernels are never locked until the
schedule has been computed.
5.3.5 Scheduling Priority
The order in which operations are selected for scheduling influences the final
shape of the kernel. The following primary scheduling priorities based on the level of
operations are used. In innermost first order, the operations are scheduled in depth order,
starting from the innermost. In lexical order, the operations are scheduled in the order
they appear in the original source code. The lexical order follows the order of most of
the dependencies in the 1-D DDG. In block lexical order, the operations are scheduled in
101

the order of scheduling blocks: before-innermost-after. The scheduling order follows the
natural order of the execution of the loops and of most dependencies. Finally, in unsorted
order, the loop level of the operations does not influence the scheduling priority.
After the primary scheduling priorities, three secondary scheduling priorities are
used to break ties. With slack priority the operations with a smaller slack are scheduled
first. Critical operations, i.e. operations that use any critical resource (a resource used
90% of the time or more in the schedule), have their slack divided by two to increase their
priority. With smaller lstart priority the operations with a smaller latest start time are
scheduled first. The priority can be seen as a top-down scheduling approach. And with
larger estart priority the operations with a larger earliest start time are scheduled first. It
is a bottom-up scheduling approach.
5.3.6 Operation Scheduling
Once an operation has been chosen as the next candidate for scheduling, a sched-
ule cycle that satisfies the dependence constraints, the resource constraints and the inner-
most level separation constraint must be found. There are several steps to choose such a
cycle. First, one must identify the range of legal cycles where to schedule the operation.
An operation can be scheduled between its estart and lstart values. If the operation is to
be scheduled in a top-down approach, find the smallest cycle within that range. Make sure
that the operation is scheduled within the initiation interval of the loop level it belongs to,
and that it only uses available resources. If the operation is to be scheduled in a bottom-up
approach, find the latest cycle satisfying the same conditions. If the operation was sched-
uled but has been ejected since, start the search after the cycle it was scheduled to save
time. If no cycle could be found, ignore the other scheduled operations, the availability
of resources, and the initiation interval of the level of the operation. If the operation is
the virtual operation, then schedule it only where it will not be truncated. Operations that
may be in conflict with the candidate operation will be ejected and rescheduled later.
102

5.3.7 Initiation Interval Increment Methods
When the scheduler fails to find a solution with the current set of initiation inter-
vals, one loop level must be chosen and its initiation interval incremented by one. Several
approaches are proposed. With lowest slack first, the average slack of the operations of
each level is computed. The initiation interval of the loop level with the lowest average
slack value is incremented. With innermost first, used in conjunction with the innermost
first scheduling priority, the levels are considered from the innermost to the outermost.
The first level that did not manage to schedule all its operations is chosen to increase the
initiation interval. Its inner loops do not need to increase their initiation intervals because
they, at some point during the scheduling process, managed to have all their operations
scheduled. Finally, with lexical, used in conjunction with the lexical scheduling priority,
the first loop level in lexical order that did not manage to schedule all its operations is
chosen to increase the initiation interval.
The last two approaches, innermost first and lexical, are dependent on the chosen
scheduling priority scheme. They cannot be used for other scheduling priorities.
5.4 Experiments
The proposed solution was implemented in the Open64/ORC2.1 compiler. 19
loop nests of depth 2 or 3, extracted from the NAS, SPEC2000, and Livermore benchmark
suites, were software-pipelined at the outermost level and run on an Itanium2 workstation.
Each schedule was run three times on an Itanium workstation and the average time of the
three runs compared to the same loop nest scheduled using modulo-scheduling on the
innermost loop.
Results show that the hybrid approach avoids the pitfalls of the two other ap-
proaches and produces schedules on average twice faster than modulo-scheduling sched-
ules. Because of its large search space, the flat approach may not reach a good solution
fast enough and showed poor results in few cases. The level-by-level approach is more
scalable and less dependent on the choice of the scheduling priority.
103

5.4.1 Comparison of the Scheduling Approaches
For each loop level of each loop nest, the best schedules given by each method
was compared to the others. The results are shown in Figure 5.8. On average, hybrid
and level-by-level schedules are twice faster than MS schedules. In several occasions,
the flat solution is slower. Even when given as much as 10 times more attempts to find
a solution, the flat scheduler fails and had to increment the initiation intervals, resulting
in a slower final schedule. In one case (liv-5), the flat schedule was able to perform
better than the level-by-level approach. As expected, the hybrid approach combined the
advantages of the two other methods and, for all benchmarks but liv-3, produces a kernel
with best execution time. Therefore, the hybrid approach should be the method of choice
to generate SSP kernels.
1
2
3
4
5
AV
G
mm
-kji
mm
-kij
mm
-jki
mm
-jik
mm
-ikj
mm
-ijk
liv-2
3
liv-1
8.3
liv-1
8.2
liv-1
8.1
liv-7
liv-5
liv-4
liv-3
liv-2g3
blas
hydr
o
sor
Spee
dup
vs. M
odul
o Sc
hedu
ling
FlatLevel-by-LevelHybrid
Figure 5.8: Execution Time Speedup vs. Modulo Scheduling
The register pressure was also measured. On average, the register pressure in
SSP schedules is 3.5 times higher than with MS schedules, in line with results from
previous publications. The hybrid and level-by-level approaches have comparable register
pressures, whereas the pressure is lower for the flat approach as the initiation intervals are
higher. For hydro, the register pressure was too high with the level-by-level approach.
It was observed that the register pressure is directly related to the speedup results. The
104

higher the initiation intervals, the lower the register pressure and the execution time of the
schedules.
5.4.2 Comparison of the Scheduling Priorities
Figure 5.9 compares the results of the different scheduling priorities for each
scheduling approach. The minimum execution time and register pressures were recorded
and the relative difference of each heuristic to the minimum was computed for each test
case. The average is shown in the figure. The first letter U, L, I, or B stands for the
primary selection method: Unsorted, Lexical, Innermost first or Block lexical respec-
tively. The second letter S, E, or L stands for the secondary method: Slack, largest Estart
or smallest Lstart. Level-by-Level scheduling was only tested for the unsorted primary
method because all methods are equivalent when loop levels are scheduled one level after
the other.
0
0.05
0.1
0.15
0.2
0.25
B/E
B/L
B/SI/E
I/LI/S
L/E
L/LL/S
U/E
U/L
U/S
Ave
rage
Slo
wdo
wn
execution timeregister pressure
(a) Flat
0
0.05
0.1
0.15
0.2
0.25
U/E
U/L
U/S
Ave
rage
Slo
wdo
wn
execution timeregister pressure
(b) Level-by-Level
0
0.05
0.1
0.15
0.2
0.25
B/E
B/L
B/SI/E
I/LI/S
L/E
L/LL/S
U/E
U/L
U/S
Ave
rage
Slo
wdo
wn
execution timeregister pressure
(c) Hybrid
Figure 5.9: Comparison of the Scheduling Priorities
The flat scheduler appears to be highly dependent on the scheduling priority used.
There is no clear best priority. On average, each heuristic gives a solution 7.5% slower
than the best heuristic for a given loop nest while the integer register pressure is on average
18% higher. The best compromise can be found with B/S and L/S. Those high variations
are also explained by the size of the solution space. Under the loose constraints used by
the flat scheduler, there exist several correct solutions that can be attained.
105

Under tighter constraints, used by the level-by-level scheduler and indirectly by
the hybrid approach, those variations disappear. The choice of the scheduling priority
seems to have a limited influence on the quality of the computed solution.
5.4.3 Comparison of the Initiation Interval Increment Method
Figure 5.10 compares the initiation interval increment heuristics for the flat and
hybrid schedulers where appropriate. As before, the average relative difference to the
minimum for each test case under the same scheduling approach is measured. The three
heuristics, lowest Slack, Innermost first, and Lexical, are noted S, I, and L, respectively.
0
0.1
0.2
0.3
LIS
Ave
rage
Slo
wdo
wn
(a) Flat
0
0.1
0.2
0.3
LIS
Ave
rage
Slo
wdo
wn
(b) Hybrid
Figure 5.10: Comparison of the Initiation Interval Increment Methods
For the flat scheduler, the lexical order produces the fastest schedules. One may
add that the register pressure is higher though. Indeed, because the best level is chosen
when the initiation interval is incremented, a solution with a lower initiation intervals
is found. In consequence, the number of stages may increase, and with it, the register
pressure. Lower execution time comes to the expense of registers.
For the hybrid scheduler, the impact of the initiation interval increment heuristics
is limited. Indeed, the innermost level, which contains most of the operations, is treated
as a special case. Therefore, there is not much scheduling pressure left for the other levels
(2 to 3 maximum).
106
5.5 Related Work
There exist several methods to schedule operations and compute a kernel in the
case of a single loop. Those methods can be separated into two categories: optimal and
heuristic-based. Optimal modulo-scheduling techniques [AG86, EDA95, GAG94, NG93,
RGSL96] are necessary for evaluation purposes but their high computation time due to
the NP-completeness of the scheduling problem make their implementations in a pro-
duction compiler impractical. Among the heuristic-based techniques, the most relevant
methods are: Iterative Modulo-Scheduling [Huf93, Rau94], Slack Modulo-Scheduling
[Huf93], Swing Modulo-Scheduling [LGAV96], Selective Scheduling [ME97] and Inte-
grated Register-Sensitive Iterative Software-Pipelining [DRG98]. Those techniques have
already been reviewed in Section 2.1.
Modulo-scheduling techniques were extended to handle loop nests through hierar-
chical reduction [Lam88, WG96, MD01], in order to overlap the prolog and the epilog of
the inner loops of successive outer loop iterations. Although seemingly similar in idea to
the level-by-level approach proposed here, hierarchical reduction software pipelines every
loop level of the loop nest starting from the innermost, dependencies and resource usage
permitting. The dependence graph needs to be reconstructed each time before scheduling
each level, and cache effects are not considered. SSP only tries to software pipeline a
single level and to execute its inner loops sequentially, thus allocating resources first to
the loop level that requires them the most. Modulo-scheduling can also been combined
with prior loop transformations [CDS96, WMC98, PHA02].
5.6 Conclusion
In this chapter, several kernel generation methods were presented. The computed
schedule must respect the scheduling constraints that have been presented in Section 3.5,
including the SSP dependence constraint, the sequential constraint, and the innermost
level separation constraint. Several issues were encountered and solutions found. Each
subkernel has its own initiation interval which must be respected. Also, a subkernel is not
107
allowed to be truncated and therefore, not every cycle is a legal scheduling cycle. Finally,
in case the scheduler cannot compute a solution in a reasonable amount of time, a decision
must be made to decide which initiation interval should be incremented.
Three scheduling approaches were proposed and studied. The level-by-level ap-
proach schedules the loops individually starting from the innermost. Once the subkernel
of a loop has been computed, it cannot be undone. The subkernel of the enclosed loop
becomes a virtual operation for the current loop level. The flat approach does not lock a
subkernel once fully scheduled. Operations from any loop level may be considered and
undo previous decisions made in a different subkernel. A larger solution space can there-
fore be explored. Finally, the hybrid approach uses the level-by-level approach for the
innermost loop and schedules the other levels using the flat approach. Several scheduling
priorities and initiation interval increment methods were also proposed. The methods are
provably correct and handle all the issues aforementioned.
The proposed approaches and heuristics were implemented in the Open64 and
analyzed on loop nests from the Livermore, SPEC2000, and NAS benchmarks. schedul-
ing constraints. Experiments demonstrated that, although the level-by-level and hybrid
approaches show comparable schedules in terms of execution and register pressure, the
hybrid method is to be preferred because it outperforms the level-by-level approach in
some cases. The flat method was victim of its own large search space and could not find
good solutions in a reasonable amount of time and had to settle for kernels with larger
initiation intervals. The choice of the heuristics have little influence on the final schedules
for the hybrid and level-by-level approach.
108

Chapter 6
REGISTER PRESSURE EVALUATION
In this chapter we present a fast method to compute the register pressure of a
SSP kernel. Only loop variants are considered, although the register pressure from loop
invariants can easily be added. The first section motivates our work, explains the issues
that we are facing and introduces some necessary notations. The second section describes
our solution to compute the register pressure of a kernel, also called MaxLive. The last
section shows our experimental results.
6.1 Problem Description
6.1.1 Motivation
Several motivations lead to this work. First, as it will be seen in the next chapter,
register allocation is a time-consuming process and register allocation cannot always be
found. As the loop nest gets deeper, the register pressure might increase to a point where
the register file cannot accommodate the register needs of the schedule, even with an
optimal register allocator that always returns a solution which minimizes register usage.
In those cases, calling the already time-consuming register allocator would be a waste of
time. It is therefore important to be able to measure the register pressure of a schedule
without the help of the register allocator, and to be able to do so in a short amount of time.
If the register pressure is deemed too high for the target architecture, the SSP framework
can decide, for instance, to either increase the initiation interval and recompute a new
kernel with a lower register pressure, or to choose a different loop level to schedule as
shown in Figure 6.1.
109

n−D DDG
loop nest
loop nest
loop level
(1−D schedule)
kernel
assembly code
(final schedule)
register−allocated kernel
1−D DDG register pressure oktoo highor
SelectionLoop
SimplificationDDG
GenerationKernel
GenerationCode
AllocationRegister
n−D space1−D space
Register PressureEvaluation
Figure 6.1: SSP Framework
When developing and testing the register allocator, a second use for a fast register
pressure evaluation technique arose: to be able to evaluate the quality of the register
allocator. The register pressure provides us with a lower bound for the register allocator
to compare itself to. The closer the number of allocated registers are to that lower bound,
the better the register allocator is.
Similarly, the method can be used to evaluate the impact of any scheduling method
on the register pressure in the kernel. The register pressure is independent of the register
allocation solution and therefore allows schedulers to be compared fairly.
Finally, such a measure could orient the design of future computer architectures. If
the SSP technique was to be taken into account during the development of a new processor
family, the register pressure of benchmark loop nests would help the designers to decide
of the size of the integer and floating-point register files.
It is always possible to compute the final schedule and use traditional backwards
liveness analysis to compute the register pressure. However such a method is not efficient
in both time and space (as confirmed by our experimental results). A faster method, based
solely on the 1-D kernel, would be preferred.
110

6.1.2 Notations
The time period during which the instance of scalar variable (or loop variant) is
live is called the scalar lifetime of the instance of the variable. The first and last cycles
of the scalar lifetimes are called the start cycle and end of the scalar lifetime. If a scalar
variable is defined in outermost iteration i and killed in outermost iteration j, we call the
number of outermost iterations spanned by the corresponding scalar lifetime the omega
value of the lifetime. It is defined as j− i+ 1. It also corresponds to the number of neces-
sary live-in values for that particular variant. The number of scalar lifetimes in any given
cycle of the final schedule is called the FatCover of that cycle. The register pressure of
the schedule is the maximum FatCover over every cycle and is called MaxLive.
In order for the operations to be interruptible and restartable on a VLIW machine,
a scalar lifetime starts at the beginning of its start cycle and ends at the end of its end
cycle. Therefore, if a scalar lifetime is ended by operation op1 in the same cycle as
another scalar lifetime is started by operation op2, the two lifetimes are allowed to share
the same register only if op1=op2. Those conventions match the conventions used for MS
[RLTS92].
start
end
omega=0
omega=1
a
b
c
a
b
c
FatCover11
2
2100
2
iteration i iteration i+1
Figure 6.2: Scalar Lifetimes Notations Example
Those notations are shown on a example in Figure 6.2 where a sample of an SSP
schedule is shown. A scalar lifetime is represented by a plain line, its start by a circle,
and its end by a cross. If the same operation ends a scalar lifetime and starts another, the
cross and circle will be superimposed.
111
The scalar lifetimes can be sorted in three distinct categories: global, local, and
cross-iteration. A global lifetime exists throughout the entire schedule and corresponds
to a constant variable. It is easily accounted for and can be omitted for our purpose. The
remaining scalar lifetimes are local if their omega value is zero, and cross-iteration if not.
The distinction will be essential to our solution.
As explained in the previous section, the index of a stage within an outermost
iteration may have an influence on the number of scalar lifetimes within that stage. For
the purpose of our algorithm, the first encounter of a stage within one outermost iteration
will be referred as first, while the last will be referred as last. By construction of the
final schedule, the first and last instances of a stage can only be encountered in the
Outermost Loop Pattern. Each of the Sn instances of the Outermost Loop Pattern, defined
in Chapter 8 shows a different combinations of first and last stages.
6.1.3 Problem Statement
Our problem can be formulated as follows: Given an SSP 1-D schedule, evaluate
the register pressure of the final schedule. We assume that any spilling technique, if any,
has already been applied. We are only concerned with local and cross-iteration lifetimes.
For architectures with rotating registers, the register pressure corresponds to the
rotating register pressure. Static registers are only used for global lifetimes. For archi-
tectures without rotating registers, the register pressure corresponds to the static register
pressure.
It is the first time a method to compute the register pressure of an SSP schedule
is proposed. With single loops, where MS is used, the traditional technique is to count
the number of lifetimes in the kernel, also named MaxLive [RLTS92]. Our method
can be seen as its natural extension to handle the more complex issues specific to the
multidimensional case, presented in the next section. MaxLive was the chosen method
to evaluate the efficiency of register allocators in [EDA94, LAV98]. Other work [NG93]
considered the theoretical register pressure during the scheduling phase by counting the
112

number of buffers required to store results of each operation. However the number of
buffers did not take into account that some buffers could be reused. The register pressure
was also studied for non software-pipelined schedules, such as the concept of FatCover
in [HGAM92]. Llosa et al. [LAV98] used MaxLive to measure the register pressure of
floating-point benchmarks. Their results also show that a FP register file of 64 registers
would accommodate most of the register pressure and limit accesses to memory in the
case of MS scheduled loops. The results were later confirmed in [ZLAV00].
6.1.4 Issues
The problem of evaluating the register pressure of the schedule by considering the
kernel only is straightforward in the single loop case [RLTS92]. However, in the multi-
dimensional case, new issues arise.
c
dc
c
c
d
d
d
abcd
abcd
abcd
stretched scalar lifetime
of stalled outermost iterationirregular initiation rate because
T=2T=3
irregular initiation rate becauseof variable initiation interval
Figure 6.3: Irregular Pattern of the Scalar Lifetimes
First, unlike with MS, the scalar lifetimes do not exhibit a regular pattern. When
an outermost iteration is stalled, the start of the scalar lifetimes in that iteration is also
delayed. Moreover, an already started lifetime will be stretched while holding a value
until the execution of the stalled outermost iteration resumes. The problem becomes
even more complex when the initiation interval is not constant. Examples are shown in
113

Figure 6.3 where a sample of an SSP schedule is shown with the innermost stages grayed
out.
d
d
c
e
(a) Always Used, Except for the Last Instance
d
d
c
e
(b) Never Used, Except for the Last Instance
Figure 6.4: Scalar Lifetimes Variance Within Different Instances of the Same Stage
Second, given a stage and cycle within that stage, the number of scalar lifetimes
is different depending on the instance of the stage in the final schedule. For instance, in
Figure 6.4(a), a scalar lifetime starts in stage d and ends 3 cycles later in stage c. However
if it is the last instance of stage d, then the scalar lifetime is useless (but a register is still
needed for the operation in stage d. Symmetrically, in Figure 6.4(b), a scalar lifetime
always ends in the same cycle as it starts because no operation uses the value. But the
last instance of the scalar lifetime is used by stage e from an upper level. Therefore two
instances of the same scalar lifetime may have different lengths.
Finally, the method must be obviously fast enough so that schedules with a register
pressure higher than the number of available physical registers can be quickly detected in
the compilation process..
6.2 Solution
6.2.1 Overview
To quickly compute the register pressure of the final schedule using only the ker-
nel, some insight on the lifetimes in the final schedule is needed. An example is shown
in Figure 6.5. The stable phase of the final schedule, where the maximum is most likely
114

to be encountered is an alternation between Sn instances of the Outermost Loop Pattern
(OLP) and the Inner Loop Execution Segment (ILES), represented in the figure 1. The
first instance of a stage is represented by a light gray box, whereas the last instance is
represented by a dark gray box. The other instances are left white.
abd c
abd ce
e
c
c
d
d
c
c
d
db
b
1 2 3
4 5 76
7654
: stretched cross−iteration
: stretched local lifetimes: local lifetimes: stretched local lifetimesfirst
last
lifetimes
123
: local lifetimes: local lifetimes
: cross−iteration lifetimes
last
first
Legend
: instance of the stageslastfirst: instance of the stages
OLP: ILES:
Within one outermost iteration:
Figure 6.5: Scalar Lifetimes in the Final Schedule Example
During the execution of an OLP instance, the scalar lifetimes can either be local
in a first stage, local in a last stage, or cross-iteration. In the ILES segment, they can be
1 For more details about those patterns, the reader is referred to Section 3.4 or Chapter 8
115
either local or stretched lifetimes from the latest OLP instance (local first, local last, or
cross-iteration). In our solution, each type of scalar lifetimes is accounted for individually.
The FatCover at a given cycle of the final schedule can then be expressed as the sum of
the lifetimes from each type at that cycle. The final register pressure is then defined as the
maximum over all the cycles of the schedule.
The prolog and epilog phases of the final schedule are ignored. Indeed, during
those two phases, a smaller number of outermost iterations are executed in parallel, and
it is therefore highly unlikely that the register pressure may reach its peak at that moment
(although it is possible if the number of live-in values is high enough).
The following sections explain how to count each type of scalar lifetime for each
situation.
6.2.2 Cross-Iteration Lifetimes
Because the outermost loop level is the only level actually software pipelined,
only variants defined in the outermost level can have a cross-iteration lifetime. The first
step consists of identifying the cross-iteration variants. They are defined in the stages
appearing in the outermost loop only and show at least one use with an omega value
greater than 0. Then, for each variant, the stage and modulo-cycle of the definition and of
the last use are computed and noted Sdef , cdef , Skill, and ckill, respectively. The definition
of each variant is unique and therefore easily found. Because cross-iteration lifetimes
span several outermost iterations, the last use of a such lifetimes must be searched among
each of the spanned iterations. The stage index of the last use is computed by adding the
omega value of the use to its stage index.
Afterward, the number of cross-iteration variants lifetimes at modulo-cycle c in
116

COMPUTE CROSS ITERATION LT():civs← ∅ // cross-iteration variants setovs← set of the variants defined in the outermost loop
// Identify the cross-iteration variantsfor each operation op in the schedule
for each source operand src of opif omega(op, src) > 0 and src ∈ ovs thencivs← civs ∪ {src}initialize Sdef , cdef , Skill, ckill for src to −1
// Collect the parameters for each cross-iteration variantfor each stage s from l1 to f1, backwards
for each cycle c from T − 1 to 0, backwardsfor each operation op in s at cycle c
for each source operand src of op in civsif Skill(src) = s+ omega(op, src) thenSkill(src) unchangedckill(src)← max(ckill(src), c)
else if Skill(src) < s+ omega(op, src) thenSkill(src)← s+ omega(op, src)ckill(src)← c
for each result operand res of op in civscdef (res)← cSdef (res)← s
Figure 6.6: Cross-Iteration Lifetimes Algorithm
117

the OLP is then given by LTcross(c):
LTcross(c) =∑
v∈civs((Skill(v)− Sdef (v) + 1) + δdef (c, v) + δkill(c, v)) (6.1)
where
δdef (c, v) = −1 if c < cdef (v), 0 otherwise
δkill(c, v) = −1 if c > ckill(v), 0 otherwise
Skill(v) − Sdef (v) + 1 represents the length in stages of the lifetime of v. The two other
δ terms are adjustment factors to take into account the exact modulo-cycle the variant is
defined or killed in the stage. Figure 6.7 shows an example of a cross-iteration lifetime.
The lifetime starts at Sdef = 1, corresponding to stage b, and cdef = 2, and stops omega =
3 iterations later in stage Skill = 0 + omega at modulo-cycle ckill = 0. Then the number
of cross-iteration lifetimes for that variant is equal to 2, 1, and 2 at modulo-cycle 0, 1, and
2 respectively.
LTcross212
b
c
d
a
a
a
b
bc
a
omega=3
c = 0kill
S = 0kill
c = 2def
S = 1def
Figure 6.7: Cross-Iteration Lifetimes Computation Example
The number of live-out cross-iteration lifetimes corresponds to the number of life-
times at the entrance of cycle after T − 1 and is represented by LTcross(T ).
6.2.3 Local Lifetimes
The computation of the local lifetimes is done by using traditional backwards data-
flow liveness analysis on the control-flow graph of the loop nest where each loop level is
118

executed only once. A recursive visit of the enclosed loop level is added to make sure that
the first instance of a stage is encountered once. A generic example for a loop nest of
depth 3 is shown in Figure 6.9 where the arrows indicate the order in which the stages are
visited. The outermost stages are visited once because the first instance of an outermost
stage is also the last. Stages visited as first are represented in light gray whereas stages
visited as last are in dark gray.
The algorithm is shown in Figure 6.8. The liveness analysis does not require to
actually unroll the loop nest as represented in the example. The algorithm only requires
the current liveset live. When the last or first instance of a stage is encountered, the
number of elements in live is stored into:
LTlocal(s, c, p) (6.2)
where s is the stage index (0 ≤ s ≤ S− 1), c the cycle within that stage (0 ≤ c ≤ T − 1),
and p the position of the stage (first or last). The number of live-out local lifetimes is
stored into LTlocal(s, T, p).
6.2.4 Register Pressure
To compute the register pressure, we first compute FatCover for each cycle of
each instance of the OLP. The OLP is composed of Sn kernels, each made of all the S
stages. The register pressure is the sum of the cross-iteration and local lifetimes for each
stage. The distinction between first and last instance of the local lifetimes must be made,
leading to Sn different cases. We then obtain the formula for LTolp shown.
LTolp(c) = maxi∈[1,Sn]
(l1∑
s=ln−iLTlocal(s, c, last) +
ln−1−i∑
s=f1
LTlocal(s, c, first)
)
+LTcross(c) (6.3)
The first term counts all the cross-iteration lifetimes. The second is the maximum number
of local lifetimes among the Sn possible instances of kernel in the OLP.
119

COMPUTE LOCAL LT():// Start recursive analysis from the outermost level∀(s, c, p) ∈ [f1, l1]X[0, T ]X{first, last}LTlocal(s, c, p)← −1, Visit Level(1, ∅)
// Initialize first with last value if first uninitializedfor each stage s from f1 to l1
for each cycle c from 0 to Tif LTlocal(s, c, first) = −1 thenLTlocal(s, c, first)← LTlocal(s, c, last)
VISIT LEVEL(level level, live set live):// Count the local lifetimes for loop level ’level’for each stage s from llevel to flevel, backwards
for each cycle c from T to 0, backwardslive← live ∪DEF (s, c) ∪ USE(s, c)if LTlocal(s, c, last) = −1 thenLTlocal(s, c, last)← |live|
elseold← LTlocal(s, c, first)LTlocal(s, c, first)← max(old, |live|)
live← (live−DEF (s, c)) ∪ USE(s, c)// Recursive call for the inner levelsif level < n and s = flevel+1 then
Visit Level(level + 1, live)
Figure 6.8: Local Lifetimes Algorithm
120
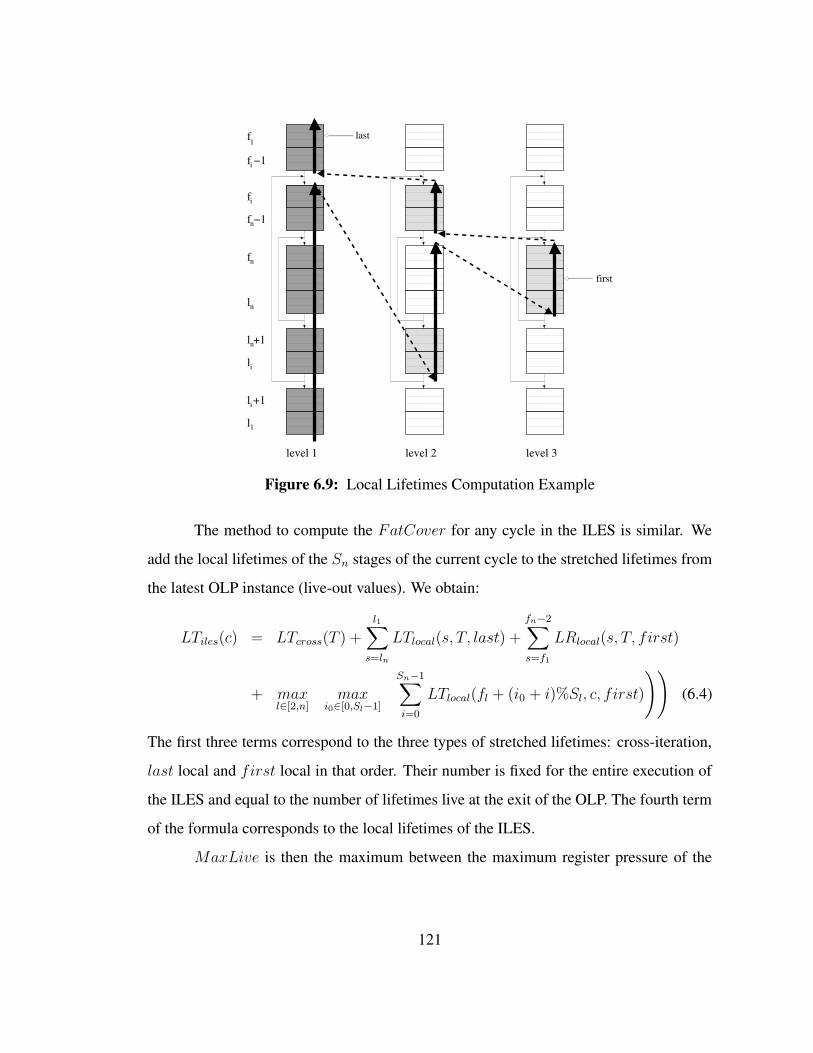
l
l +1
l +1
l
l
f
f −1
f
f −1
f1
1
i
i
i
i
n
n
n
n
level 1 level 2 level 3
first
last
Figure 6.9: Local Lifetimes Computation Example
The method to compute the FatCover for any cycle in the ILES is similar. We
add the local lifetimes of the Sn stages of the current cycle to the stretched lifetimes from
the latest OLP instance (live-out values). We obtain:
LTiles(c) = LTcross(T ) +
l1∑
s=ln
LTlocal(s, T, last) +
fn−2∑
s=f1
LRlocal(s, T, first)
+ maxl∈[2,n]
(max
i0∈[0,Sl−1]
(Sn−1∑
i=0
LTlocal(fl + (i0 + i)%Sl, c, first)
))(6.4)
The first three terms correspond to the three types of stretched lifetimes: cross-iteration,
last local and first local in that order. Their number is fixed for the entire execution of
the ILES and equal to the number of lifetimes live at the exit of the OLP. The fourth term
of the formula corresponds to the local lifetimes of the ILES.
MaxLive is then the maximum between the maximum register pressure of the
121

OLP and the maximum register pressure of the ILES patterns:
MaxLive = max
(max
∀c∈[0,T−1](LTolp(c)) , max
∀c∈[0,T−1](LTiles(c))
)(6.5)
6.2.5 Time Complexity
Both routines Compute Cross Iteration LT and Compute Local LT run in
O(S ∗ II). Assuming that the loop variant sets are implemented using bit vectors,
Visit Level runs in O(II) per stage. The routine is called once for each loop level l
and visits Sl stages per call for a total of∑n
i=1 Si. Because S > Si,∀i ∈ [1, n], the fast
method algorithms run in O(n ∗ S ∗ II).
The computation time of the formulas is bounded by the two maximum operators
enclosing a sum in LTiles(c). Because Si ≤ S,∀i, the computation time of the formula
is bounded by O(S2 ∗ II ∗ n). Therefore, the overall complexity of the fast method is
bounded by: O(S2 ∗ II ∗ n).
6.3 Experimental Results
The algorithms were implemented in the ORC 2.1 compiler and tested on an
1.4GHz Itanium2 machine with 1GB RAM running Linux. The benchmarks are SSP-
amenable loop nests extracted from the Livermore Loops, the NPB 2.2 benchmarks and
the SPEC2000 FP benchmark suite. A total of 127 loop nests were considered. When all
the different depths are tested, 328 different test cases were available. There were 127,
102, 60, 30, and 9 loop nests of depth 1, 2, 3, 4, and 5, respectively.
The straightforward method consisting of unrolling the final schedule and apply-
ing liveness analysis was also implemented for comparison. It is referred as the compre-
hensive method. Our method in contrast is referred as the fast method.
The main results are summarized here and explained in details in the next sub-
sections. (1) The fast method is 1 to 2 orders of magnitude faster than the compre-
hensive method, and 3 to 4 orders of magnitude faster than the register allocator. (2)
122

Despite the approximations made by the fast method, its computed MaxLive is identi-
cal to MaxLive computed by the comprehensive method. No rule of thumb could be
deduced to predict MaxLive by only considering the 1-D schedule parameters such as
kernel length, number of loop variants, and others. Rotating Register pressure increases
quickly for integer values as the loop nest gets deeper and about half of the loop nests
of depth 4 or 5 show a MaxLive higher than the size of the INT register file. (3) The
floating-point rotating register pressure remains about constant as the depth of the loop
nests increases, and never exceeds 47 registers. Consequently, the floating-point rotating
register file could be reduced from 96 to 64 registers. The extra 32 registers could be
added to the integer register file instead.
6.3.1 Register Pressure Computation Time
1e-04
0.001
0.01
0.1
1
10
Tim
e (s
ec,lo
g sc
ale)
Benchmarks
depth 1
depth 2
depth 3
ComprehensiveFast
Figure 6.10: Register Pressure Computation Time
The measurements of the execution time of the comprehensive and fast methods
are presented in Figure 6.10 where the loop nests have been sorted first by increasing
depth, delimited by tics on the horizontal axis, and then by increasing kernel length. Note
the logarithmic scale for the vertical axis. The comprehensive and fast methods take
up to 3.18 and 0.04 seconds respectively, with an average of 0.16 and 0.005 seconds.
123

The running time of each method is directly related to the kernel length. The shape of
the graph confirms the quadratic running time of the fast method and the influence of
the depth of the loop nest. The fast method is 22.9 times faster than the comprehensive
method, with a maximum of 217.8. As the loop nest gets deeper, the speedup becomes
exponentially more significant.
1
10
100
1000
10000
100000Sp
eedu
p (l
og s
cale
)
Benchmarks
Figure 6.11: Speedup vs. the Register Allocator
In order to use the register pressure evaluation in the SSP framework, its execu-
tion time must be noticeably lower than the execution time of the register allocator. The
execution time of the fast method and the register allocator presented in the next chapter
are compared in Figure 6.11. On average, the fast method is 3 orders of magnitude faster
than the register allocator with a maximum of 20000. As the loop nest gets deeper, i.e. as
the MaxLive increases and the need for a quick method to evaluate the register pressure
a priori becomes stronger, the speedup increases, making the fast method a valid tool to
detect infeasible schedules before actually running the register allocator.
Although the fast method does not take into account the live-in and live-out life-
times, the computed MaxLive was identical for the two other methods in all the bench-
marks tested. It confirms our assumption that MaxLive is less likely to appear in the
prolog and epilog.
124

6.3.2 Register Pressure
The computed MaxLive is actually an optimistic lower bound on the actual reg-
ister pressure. It does not take into account that a value held in one register at cycle c
must remain in the same register at cycle c+1 or that the use of rotating registers reserves
a group of consecutive registers at each cycle, even if some of them are not currently
used. The actual register allocation solution computed by an optimal register allocator
may allocate more registers than MaxLive. However, with the addition of register copy
instructions, MaxLive registers can always be reached.
0
32
64
96
128
160
192
224
Max
Liv
e
Benchmarks
depth 1
depth 2
depth 3
IntegerFloating-Point
Figure 6.12: Register Pressure
The computed MaxLive is shown in Figure 6.12 for INT and FP loop variants.
The benchmarks have been sorted by increasing depth, indicated by small tics on the
horizontal axis, and by increasing MaxLive. The average MaxLive for INT and FP
are 47.2 and 15.0 respectively with a maximum of 213 and 47. If we only consider
rotating registers, the 96 hard limit on the number of available FP registers in the Itanium
architecture is never reached. However the 96 limit for INT registers is reached more often
as the depth of the loop nests increases, up to 56% for the loop nests software pipelined
at level 4 as shown in Figure 6.13.
INT MaxLive increases faster than FP MaxLive. INT MaxLive indeed in-
creases as the nest gets deeper because more inner iterations are running in parallel. It is
particularly true for INT values that are used as array indexes. If an array index is defined
125

0
0.2
0.4
0.6
0.8
1
1 2 3 4 5
Am
enab
ility
Rat
io
Depth
Figure 6.13: Ration of Loops Amenable to SSP
in the outermost loop, then there is one instance of the index for each concurrent outer-
most iteration in the final schedule. For FP values however, this is not the case. They are
typically defined in the innermost loop only and have very short lifetimes.
We also tried to approximateMaxLive by looking at the 1-D schedule parameters.
However no rule of thumb could be derived by looking at one parameter such as S, Sn, the
length of the kernel or the number of loop variants. The MaxLive was also compared to
the actual number of registers allocated by the register allocator. Unlike in MS where the
number of registers allocated rarely exceeds MaxLive+1 [RLTS92], the difference with
SSP varies between 0% and 77%. Such results are explained by the higher complexity of
SSP schedules compared to MS and because MaxLive is not a tight lower bound.
6.3.3 Register File Size
Figure 6.14 shows the total register pressure, defined as the sum of MaxLive for
INT and FP registers, on the left axis. The ratio between FPMaxLive and INTMaxLive
is shown on the right axis. The benchmarks are sorted by increasing ratio. The total
register pressure rarely exceeds 192 registers, the size of the rotating register file in the
Itanium architecture. Although FP MaxLive can be twice higher than INT MaxLive,
the FP/INT ratio remains lower than 0.5 when the total register pressure is greater than
96, the actual size of the INT register file on the Itanium architecture.
126

32
64
96
128
160
192
224
256
0
0.5
1
1.5
2
2.5
Tot
al R
egis
ter P
ress
ure
(FP+
INT
)
FP/I
NT
Rat
io
Benchmarks
Total Register PressureFP/INT Ratio
Figure 6.14: Total Register Pressure and FP/INT Ratio
Figure 6.15 shows FP MaxLive as the same loop nest is scheduled at deeper
levels. Segments on top of bars indicate an increase in FP register pressure when the loop
nest is software-pipelined at a lower level. FP MaxLive does not or barely increases as a
same loop nest is scheduled at a lower level. The maximum FP MaxLive never exceeds
47 registers. The main reason is that FP variants have very short lifetimes that mostly
appear at the innermost level of the loop nests. Scheduling a loop nest at different levels
has little influence on the number of innermost iterations running in parallel (Sn), and
therefore the number of FP scalar lifetimes appearing in the same cycle.
Several conclusions, that may be useful for future designs of architectures with
the same number of functional units and superscalar degree than the Itanium architecture,
can be drawn from these remarks. First, the INT register file may benefit from a smaller
FP register file with a ratio of 2 for 1. The FP register size can either be decreased to
save important chip real estate, or the INT register file increased to allow more SSP loops
to be register allocated. Second, for the set of benchmarks used in our experiments, the
optimal size for the FP register file would be 64. It would not prevent any other loop nests
from being register allocated while giving extra registers to the INT register file. If a size
of 64 and a INT/FP ratio of 2 are chosen, the feasibility ratio for loop nests of depth 4
127
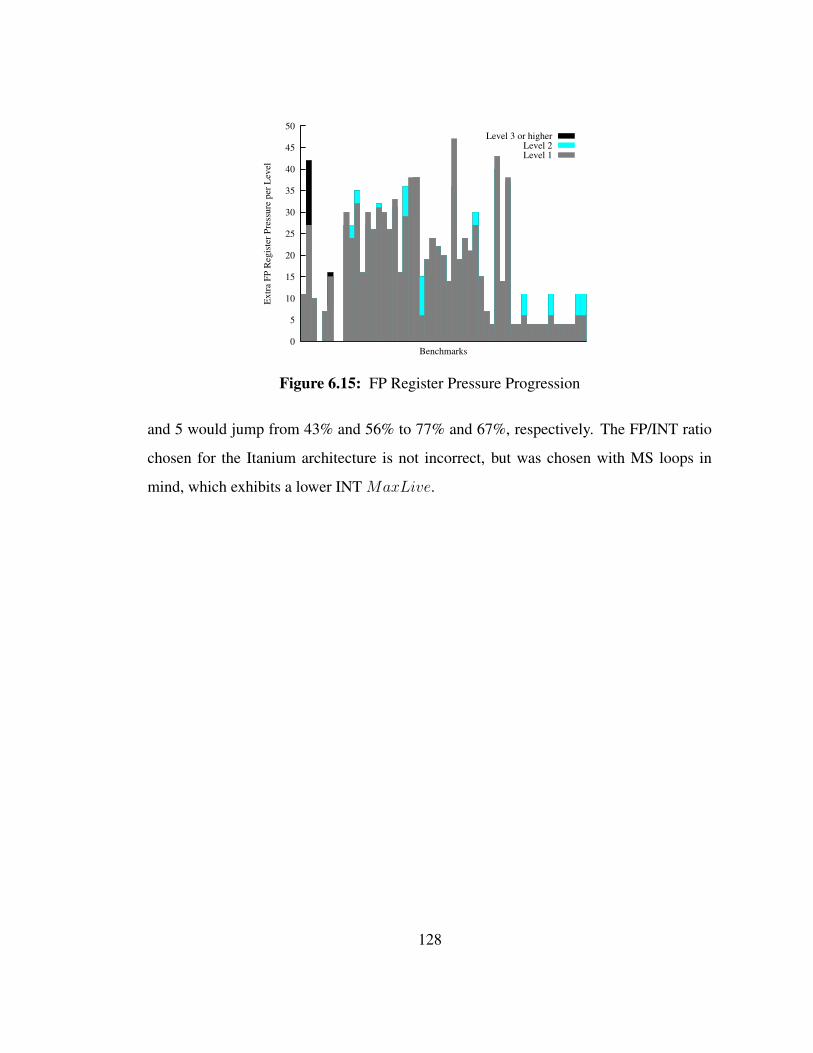
0
5
10
15
20
25
30
35
40
45
50
Ext
ra F
P R
egis
ter P
ress
ure
per L
evel
Benchmarks
Level 3 or higherLevel 2Level 1
Figure 6.15: FP Register Pressure Progression
and 5 would jump from 43% and 56% to 77% and 67%, respectively. The FP/INT ratio
chosen for the Itanium architecture is not incorrect, but was chosen with MS loops in
mind, which exhibits a lower INT MaxLive.
128
Chapter 7
REGISTER ALLOCATION
7.1 Introduction
At this point in the SSP compilation process, the kernel has already been computed
by the scheduler and the register pressure has been deemed low enough to justify trying
to allocate register to the loop variants of the kernel. This chapter presents an efficient
register allocation method for the SSP framework. It takes as input an SSP kernel and
returns a register-allocated kernel.
In this chapter we make the difference between register assignment and register
allocation. The latter describes the overall process of deciding how many registers are to
be allocated and to which loop variants. It makes sure that no interference exists between
the lifetimes of the schedule once the process is finished. On the other hand register
assignment is the act of actually assigning a specific register to a specific loop variant.
The next section describes a register allocation method used in single loops that
have been scheduled with MS. It will give the reader a quick overview of the task ahead.
Section 7.3 then presents in more details the problem of allocating registers in SSP. The
section hereafter will present our solution to the problem and its algorithms. Finally
experimental results will be shown in Section 7.5 before concluding in Section 7.7.
7.2 MS Register Allocation
In this section, we quickly review how register allocation is typically performed
with singles loops that have been scheduled using MS [RLTS92]. It will allow us to
129

introduce some concepts that will be reused later on to present the register allocation for
SSP. Unless noted otherwise, we assume for this section a single loop of N iterations and
an initiation interval of T. We assume the presence of hardware support in the form of
rotating registers.
7.2.1 Scalar and Vector Lifetimes
A scalar lifetime is the lifetime of a loop variant for a given iteration of the loop.
The variant has one operation to produce a value and one or more operations to consume
the value. It starts when the producer is issued and ends when all of the consumers have
finished. All the scalar lifetimes of the loop variant over all the iterations of the loop
compose the vector lifetime of the loop variant.
The vector lifetimes can be represented on a space-time diagram, where time is
on the horizontal axis and the registers on the vertical axis. An example with two vector
lifetimes is shown in Figure 7.1(c). A vector lifetime is composed of a wand (the diagonal
band), a leading blade in case of live-in values, and a trailing blade in case of live-out
values. The wand is made of the scalar lifetimes from iteration 0 to iteration N-1 whereas
the leading and trailing blades corresponds to iterations -1 and under, and iterations N and
above, respectively. In our example, the second vector lifetime is made of only a wand.
The first vector lifetime, because it has both a live-out value and a live-in value, has a
trailing blade and a leading blade.
A vector lifetime can be represented by a 4-tuple (start, end, omega, alpha). The
start and end values refer to the start and end cycles of the scalar lifetime produced by
the first iteration of the loop (iteration 0). The start time of the scalar lifetime of loop
iteration i is then equal to start + i ∗ T and its end time to end + i ∗ T . Omega is the
number of live-in values for the loop variant. It is also the maximum live-in distance of
all the instances of the loop variant. Alpha represents the number of live-out values for
the loop variant. For example, our two vector lifetimes are represented as (1, 3, 1, 1) and
(0, 6, 0, 0), respectively.
130

for I = 1, N doop1: y = x[1]op2: x = ...op3: ... = y
end for
(a) Source Code
op3
op1op2
op1op2
op1op2
op3
op3
(N−2 times)Kernels
Prolog
Epilog
T=2
of loop variant yscalar lifetime
(b) MS Schedule
regi
ster
s
0 2*T 3*T 4*T 5*T 6*T 7*T 8*T 9*T
time
1*T
y
x leading blade
wand
trailing blade
scalar lifetimeof iteration 0
(c) Space-Time Diagram
Figure 7.1: Vector Lifetime Examples
7.2.2 Space-Time Cylinder
A physical register Rr is said to be allocated to a vector lifetime v if it is allocated
to the first scalar lifetime of v. The ith scalar lifetime is then allocated to the physical
register number Rr−i+1.
Due to the cyclic nature of the rotating register file, the register index wraps around
to the highest register index when it becomes -1. Thus, the space-time diagram can be
seen as a cylinder where the axis represents time and the vector lifetimes are mapped onto
the surface of the cylinder. The circumference of the cylinder is then the total number of
rotating registers required by the loop.
131
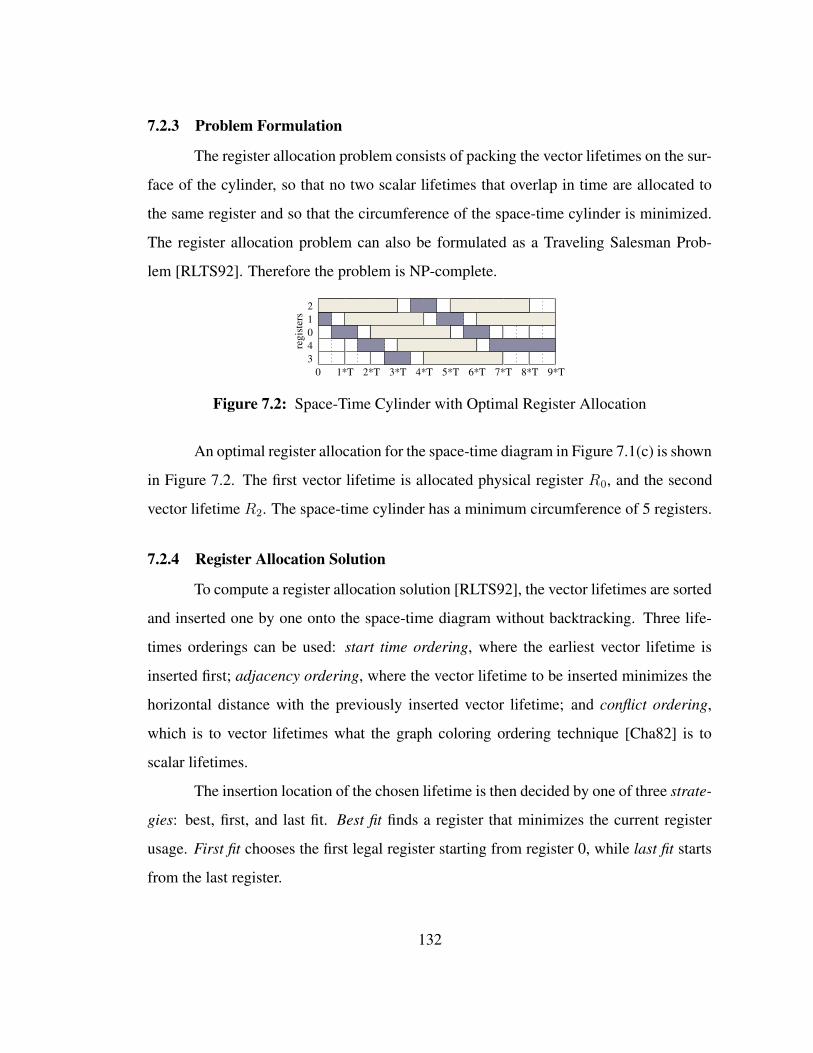
7.2.3 Problem Formulation
The register allocation problem consists of packing the vector lifetimes on the sur-
face of the cylinder, so that no two scalar lifetimes that overlap in time are allocated to
the same register and so that the circumference of the space-time cylinder is minimized.
The register allocation problem can also be formulated as a Traveling Salesman Prob-
lem [RLTS92]. Therefore the problem is NP-complete.
0 2*T 3*T 4*T 5*T 6*T 7*T 8*T 9*T1*T
043
21
regi
ster
s
Figure 7.2: Space-Time Cylinder with Optimal Register Allocation
An optimal register allocation for the space-time diagram in Figure 7.1(c) is shown
in Figure 7.2. The first vector lifetime is allocated physical register R0, and the second
vector lifetime R2. The space-time cylinder has a minimum circumference of 5 registers.
7.2.4 Register Allocation Solution
To compute a register allocation solution [RLTS92], the vector lifetimes are sorted
and inserted one by one onto the space-time diagram without backtracking. Three life-
times orderings can be used: start time ordering, where the earliest vector lifetime is
inserted first; adjacency ordering, where the vector lifetime to be inserted minimizes the
horizontal distance with the previously inserted vector lifetime; and conflict ordering,
which is to vector lifetimes what the graph coloring ordering technique [Cha82] is to
scalar lifetimes.
The insertion location of the chosen lifetime is then decided by one of three strate-
gies: best, first, and last fit. Best fit finds a register that minimizes the current register
usage. First fit chooses the first legal register starting from register 0, while last fit starts
from the last register.
132

Once all the vector lifetimes have been inserted, the space-time diagram becomes
a space-time cylinder whose circumference is minimized. Registers indexes are then
adjusted so that the minimum index is equal to the index of the first register of the actual
hardware register file.
7.3 Problem Description
The previous section presented the register allocation problem and a possible so-
lution in the simpler case of single loops that have been scheduled with MS. We now look
at the more general case of loop nests scheduled with SSP. We first present the differ-
ences with register allocation in the single loop case, before formulating the SSP register
allocation problem.
7.3.1 SSP Lifetimes Features
To illustrate the differences between lifetimes in an SSP schedule and lifetimes in
an MS schedule, the double loop nest example in Figure 7.3 is used. The kernel, shown
in Figure 7.3(b), is composed of Sn = 3 innermost stages and S = 6 stages total. The
initiation interval is equal to T = 2 cycles. The corresponding schedule and the scalar
lifetimes of loop variant y are shown in Figure 7.4.
for I1 = 0, N1 − 1 doop1: x = x[1]op2: y = ...for I2 = 0, N2 − 1 do
op3: z = yop4: ... = zop5: y = ...
end forend for
(a) Source
op1op2
op3op4op5
abcdef
(b) Kernel
Figure 7.3: Double Loop Nest Example
133

op1op2
op1op2
op3op4
op3op4
op3op4
op3op4
op3op4
op3op4
op5
op5
op5
op5
op5
op5
op5
op5
op5
op3op4
op1op2
op3op4
op3op4
op1op2
op1op2
op1op2
op1op2
op1op2
op3op4
op3op4
op3op4
op3op4
op3op4
op3op4
op3op4
op3op4
op5
op5
op5
op5
op5
op5
the same scalar lifetimemultiple intervals within
irregular initiation rate
stretched interval
a scalar lifetime of yinterval
time
1 2 3 54 6 7 8
Figure 7.4: Double Loop Nest Example Schedule with Lifetime of Variant y
134

Like MS, all the scalar lifetimes of a loop variant form the vector lifetime of that
variant. For each outermost iteration, a variant has a single scalar lifetime, represented
vertically in the schedule. However, in SSP, a scalar lifetime may be composed of multiple
intervals of possibly different lengths.
Moreover, because some outermost iterations are stalled during the execution of
the ILES, there exist stretched intervals. In our example, the first interval of the 4th
outermost iteration is stretched.
Another consequence of the stalled outermost iterations is the non-constant initia-
tion rate of the scalar lifetimes. For instance, the first five scalar lifetimes of y are initiated
every 2 cycles, but the initiation of the 6th scalar lifetimes is delayed until the end of the
execution of the ILES.
Even within the ILES, although not shown here in our example, some unknowns
exist. In a triple loop nest for instance, we may have intervals with unknown length if the
variant is defined in a middle stage but not used until after the execution of the innermost
loop for instance.
7.3.2 Problem Formulation
Again the vector lifetimes of the loop variants of the schedule can be represented
on a space-time diagram. In the presence of rotating register file, the diagram turns into
a space-time cylinder with time as the axis and where the circumference represents the
number of registers necessary to execute the schedule.
The register allocation problem for SSP can then be formulated as follows. Given
an SSP kernel, pack the vector lifetimes of the loop variants of the kernel on the surface of
a space-time cylinder, so that no two scalar lifetimes that overlap in time are allocated to
the same register and so that the circumference of the space-time cylinder is minimized.
135
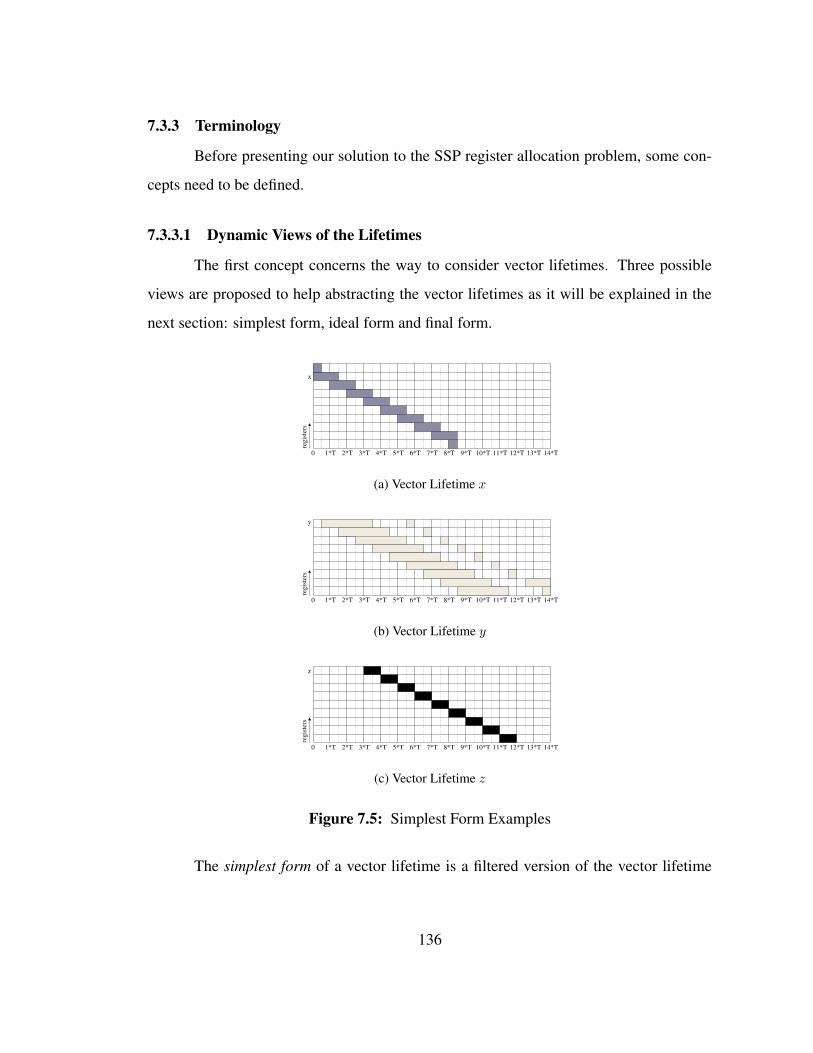
7.3.3 Terminology
Before presenting our solution to the SSP register allocation problem, some con-
cepts need to be defined.
7.3.3.1 Dynamic Views of the Lifetimes
The first concept concerns the way to consider vector lifetimes. Three possible
views are proposed to help abstracting the vector lifetimes as it will be explained in the
next section: simplest form, ideal form and final form.
0 2*T 3*T 4*T 5*T 6*T 7*T 8*T 9*T1*T 11*T 12*T 13*T 14*T10*T
regi
ster
s
x
(a) Vector Lifetime x
regi
ster
s
0 2*T 3*T 4*T 5*T 6*T 7*T 8*T 9*T1*T 11*T 12*T 13*T 14*T10*T
y
(b) Vector Lifetime y
0 2*T 3*T 4*T 5*T 6*T 7*T 8*T 9*T1*T 11*T 12*T 13*T 14*T10*T
regi
ster
s
z
(c) Vector Lifetime z
Figure 7.5: Simplest Form Examples
The simplest form of a vector lifetime is a filtered version of the vector lifetime
136
where the cycles from the ILES segments have been omitted. The form is not equiva-
lent to the special case where the number of iterations of any inner loop is equal to 11.
The simplest form truncates intervals whereas a number of iterations equal to 1 removes
definitions and uses, which might in turn reduce the length of interval to a smaller value
than the length of the truncated interval. The simplest form of the space-time diagram is
only composed of the Prolog, OLP, and Epilog. Such representation allows us to “omit”
the lifetime features specific to SSP presented earlier such as stretched intervals. Fig-
ure 7.5 shows the simplest form of the space-time diagram with the 3 vector lifetimes
represented.
The ideal form corresponds to the ideal case where all the scalar lifetimes are
issued evenly every T cycles. Each outermost iteration are executed without stalls as if
there was no resource constraint. There are therefore no stretched intervals. The ideal
form can be constructed by adding the intervals from the ILES to the simplest form. The
ideal form for our example is shown in Figure 7.6.
The final form corresponds to the final schedule without any omission or simplifi-
cation. It is the real space-time diagram of the schedule. The final form of our example is
shown in Figure 7.7.
Note that, despite the simplifications brought into the simplest and ideal form of
the space-time diagrams, repetition patterns are still present and will be exploited by the
register allocator.
7.3.3.2 Register Distances
In order to decide if two vector lifetimes we introduce the notion of register dis-
tance. If vector lifetime x is allocated register Ri and vector lifetime is allocated register
Ri+d, then the register distance between x and y, noted dist[x, y], is equal to d. It implies
1 Unlike in [RDG05] where adjustment for the lifetimes representation is required. Thereader is referred to the definition of singleEnd later on for more information
137

0 2*T 3*T 4*T 5*T 6*T 7*T 8*T 9*T1*T 11*T 12*T 13*T 14*T 15*T 16*T 17*T 20*T19*T18*T10*T
regi
ster
s
x
(a) Vector Lifetime x
0 2*T 3*T 4*T 5*T 6*T 7*T 8*T 9*T1*T 11*T 12*T 13*T 14*T 18*T 20*T19*T15*T 16*T 17*T10*T
regi
ster
s
y
(b) Vector Lifetime y
0 2*T 3*T 4*T 5*T 6*T 7*T 8*T 9*T1*T 11*T 12*T 13*T 14*T 15*T 16*T 17*T 18*T 19*T10*T
regi
ster
s
20*T
z
(c) Vector Lifetime z
Figure 7.6: Ideal Form Examples
that vector lifetime x is below and to the left of vector lifetime y in the space-time dia-
gram. If y is below x, then the distance is noted dist[y, x]. Figure 7.8 shows an example.
The notion of register distance is only valid with the final form of the space-time diagram.
For the purpose of our algorithms we define two minimum legal register distances.
The conservative distance is the minimum register distance between two vector lifetimes
x and y, noted cons[x, y], so that they do not overlap or interleave. In other words, it is the
minimum register distance between vector lifetimes so that their convex envelops do not
overlap. Figure 7.9 shows our three lifetimes on the space-time cylinder where z is above
y above x. We have dist[y, z]=cons[y, z]=3, and dist[x, y]=cons[x, y]=1. None of the
vector lifetimes overlap and intervals from different vector lifetimes are not interleaved.
138

0 2*T 3*T 4*T 5*T 6*T 7*T 8*T 9*T1*T 11*T 12*T 13*T 14*T 15*T 16*T 17*T 20*T19*T18*T 21*T 22*T 23*T 24*T 25*T 26*T 27*T 28*T 29*T 30*T 31*T 32*T10*T
regi
ster
sx
(a) Vector Lifetime x
0 2*T 3*T 4*T 5*T 6*T 7*T 8*T 9*T1*T 11*T 12*T 13*T 14*T 15*T 16*T 17*T 20*T19*T18*T 21*T 22*T 23*T 24*T 25*T 26*T 27*T 28*T 29*T 30*T 31*T 32*T10*T
regi
ster
s
y
(b) Vector Lifetime y
regi
ster
s
0 2*T 3*T 4*T 5*T 6*T 7*T 8*T 9*T1*T 11*T 12*T 13*T 14*T 15*T 16*T 17*T 20*T19*T18*T 21*T 22*T 23*T 24*T 25*T 26*T 27*T 28*T 29*T 30*T 31*T 32*T10*T
z
(c) Vector Lifetime z
Figure 7.7: Final Form Examples
The register requirement for this solution is equal to the circumference of the cylinder, 9.
The aggressive distance is the minimum register distance between two vector life-
times x and y, noted aggr[x, y], so that they do not overlap. Unlike the conservative
distance, interleaving is allowed. As proved by the experiments, the aggressive distance
will allow for a more fine-grain register allocation resulting in a lower requirement in
registers. Figure 7.10 presents an optimal solution with 7 registers where the distance be-
tween the vector lifetimes is equal to the aggressive distance: dist[y, z]=aggr[y, z]=1, and
dist[x, y]=aggr[x, y]=1. With the aggressive solution the intervals from vector lifetimes
are interleaved.
139
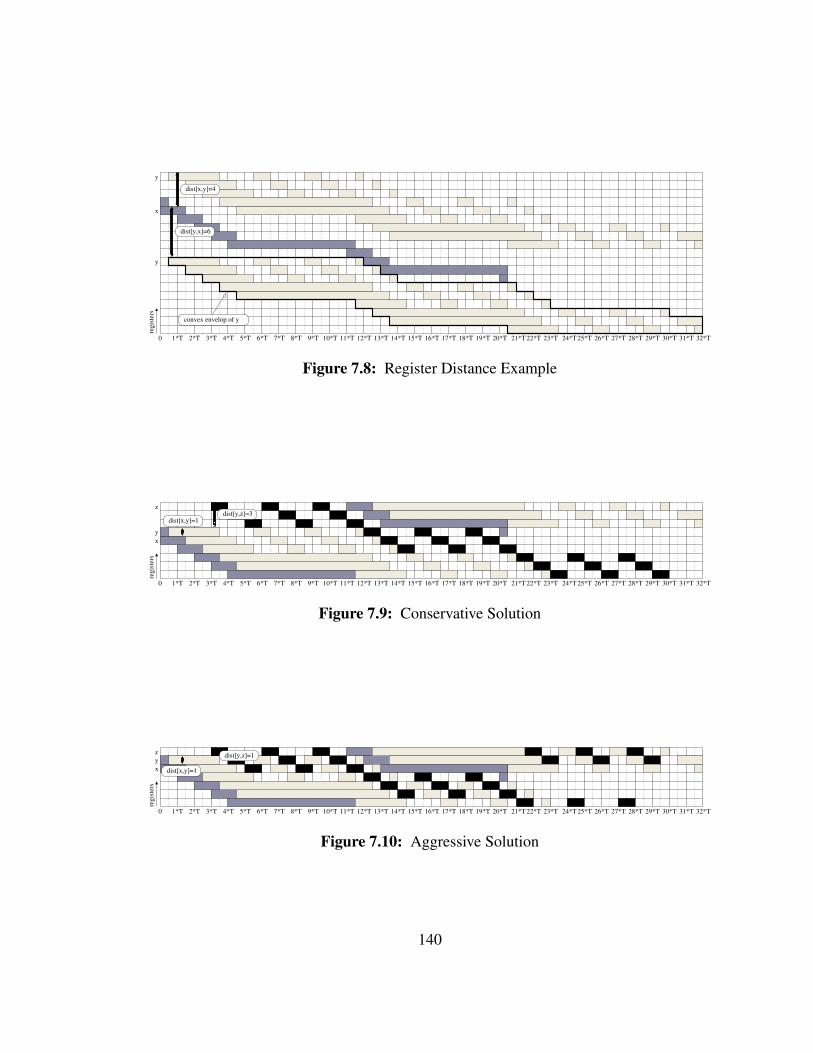
regi
ster
s
0 2*T 3*T 4*T 5*T 6*T 7*T 8*T 9*T1*T 11*T 12*T 13*T 14*T 15*T 16*T 17*T 20*T19*T18*T 21*T 22*T 23*T 24*T 25*T 26*T 27*T 28*T 29*T 30*T 31*T 32*T10*T
x
y
y
dist[x,y]=4
dist[y,x]=6
convex envelop of y
Figure 7.8: Register Distance Example
regi
ster
s
0 2*T 3*T 4*T 5*T 6*T 7*T 8*T 9*T1*T 11*T 12*T 13*T 14*T 15*T 16*T 17*T 20*T19*T18*T 21*T 22*T 23*T 24*T 25*T 26*T 27*T 28*T 29*T 30*T 31*T 32*T10*T
xy
zdist[y,z]=3
dist[x,y]=1
Figure 7.9: Conservative Solution
regi
ster
s
0 2*T 3*T 4*T 5*T 6*T 7*T 8*T 9*T1*T 11*T 12*T 13*T 14*T 15*T 16*T 17*T 20*T19*T18*T 21*T 22*T 23*T 24*T 25*T 26*T 27*T 28*T 29*T 30*T 31*T 32*T10*T
xyz
dist[x,y]=1
dist[y,z]=1
Figure 7.10: Aggressive Solution
140
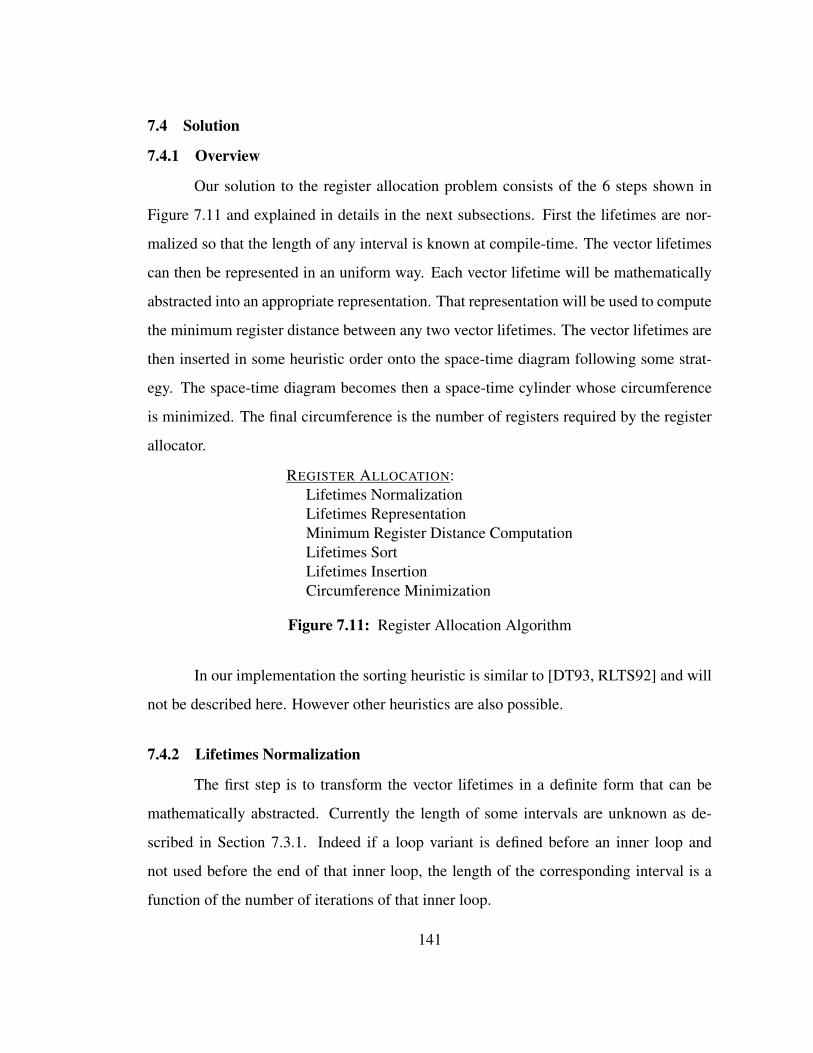
7.4 Solution
7.4.1 Overview
Our solution to the register allocation problem consists of the 6 steps shown in
Figure 7.11 and explained in details in the next subsections. First the lifetimes are nor-
malized so that the length of any interval is known at compile-time. The vector lifetimes
can then be represented in an uniform way. Each vector lifetime will be mathematically
abstracted into an appropriate representation. That representation will be used to compute
the minimum register distance between any two vector lifetimes. The vector lifetimes are
then inserted in some heuristic order onto the space-time diagram following some strat-
egy. The space-time diagram becomes then a space-time cylinder whose circumference
is minimized. The final circumference is the number of registers required by the register
allocator.
REGISTER ALLOCATION:Lifetimes NormalizationLifetimes RepresentationMinimum Register Distance ComputationLifetimes SortLifetimes InsertionCircumference Minimization
Figure 7.11: Register Allocation Algorithm
In our implementation the sorting heuristic is similar to [DT93, RLTS92] and will
not be described here. However other heuristics are also possible.
7.4.2 Lifetimes Normalization
The first step is to transform the vector lifetimes in a definite form that can be
mathematically abstracted. Currently the length of some intervals are unknown as de-
scribed in Section 7.3.1. Indeed if a loop variant is defined before an inner loop and
not used before the end of that inner loop, the length of the corresponding interval is a
function of the number of iterations of that inner loop.
141
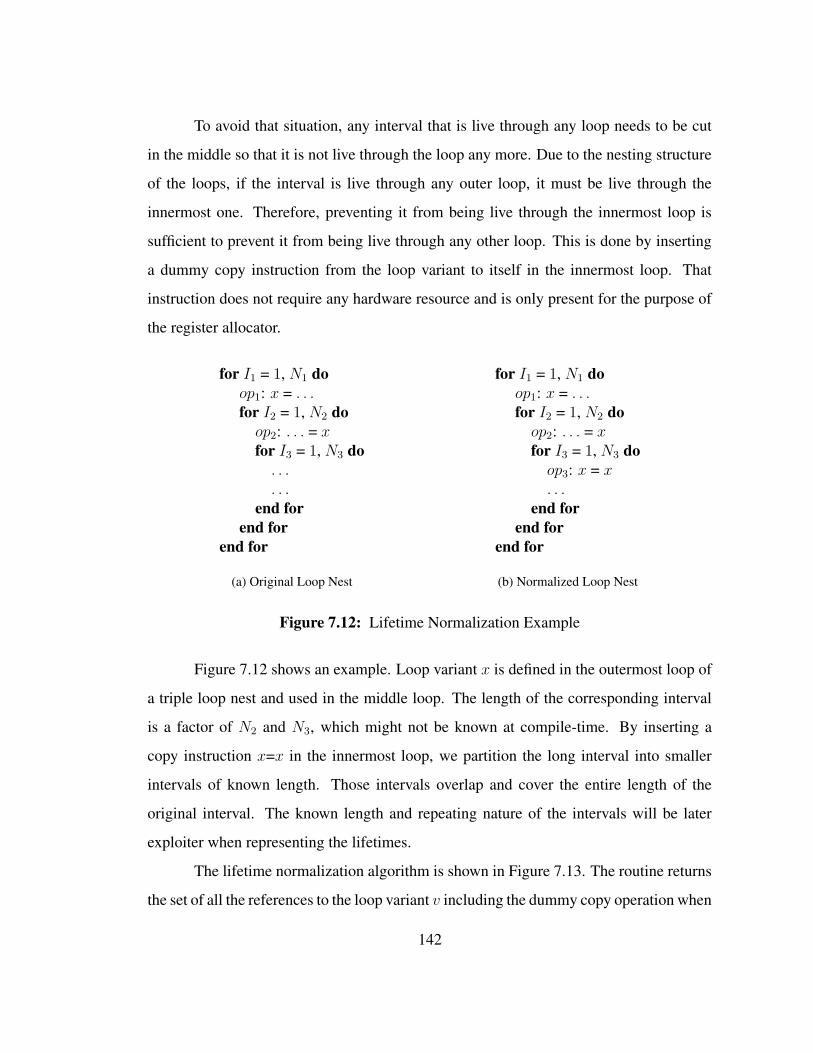
To avoid that situation, any interval that is live through any loop needs to be cut
in the middle so that it is not live through the loop any more. Due to the nesting structure
of the loops, if the interval is live through any outer loop, it must be live through the
innermost one. Therefore, preventing it from being live through the innermost loop is
sufficient to prevent it from being live through any other loop. This is done by inserting
a dummy copy instruction from the loop variant to itself in the innermost loop. That
instruction does not require any hardware resource and is only present for the purpose of
the register allocator.
for I1 = 1, N1 doop1: x = . . .for I2 = 1, N2 doop2: . . . = xfor I3 = 1, N3 do. . .. . .
end forend for
end for
(a) Original Loop Nest
for I1 = 1, N1 doop1: x = . . .for I2 = 1, N2 doop2: . . . = xfor I3 = 1, N3 doop3: x = x. . .
end forend for
end for
(b) Normalized Loop Nest
Figure 7.12: Lifetime Normalization Example
Figure 7.12 shows an example. Loop variant x is defined in the outermost loop of
a triple loop nest and used in the middle loop. The length of the corresponding interval
is a factor of N2 and N3, which might not be known at compile-time. By inserting a
copy instruction x=x in the innermost loop, we partition the long interval into smaller
intervals of known length. Those intervals overlap and cover the entire length of the
original interval. The known length and repeating nature of the intervals will be later
exploiter when representing the lifetimes.
The lifetime normalization algorithm is shown in Figure 7.13. The routine returns
the set of all the references to the loop variant v including the dummy copy operation when
142

NORMALIZATION(loop variant v):refs set← {}
// Variant References Collectionfor each operation op dotime← 1-D schedule time of oplevel← loop level of opfor each source operand opnd of op such that opnd = v doomega← live-in distance of opndref ← (time,USE, omega, level)refs set← refs set ∪ {ref}
end forfor each result operand opnd of op such that opnd = v doref ← (time,DEF, 0, level)refs set← refs set ∪ {ref}
end forend for
// Dummy copy operation insertion in the innermost loopif v is live in Ln but not defined in it thenref1 ← (fn ∗ T,USE, 0, n)ref2 ← (fn ∗ T,DEF, 0, n)refs set← refs set ∪ {ref1, ref2}
end ifreturn refs set
Figure 7.13: Lifetime Normalization Algorithm
143

needed. A reference is a 4-tuple (time,type,omega,level) where is the 1-D schedule time
of the operation, type is either a definition or a use of v, omega is the live-in distance of
v for that specific operation and level is the loop level of the operation that refers to v.
7.4.3 Lifetimes Representation
Once the lifetimes have been normalized, they can be abstracted mathematically.
The representation uses two types of parameters: the core parameters (singleStart,
singleEnd, omega, alpha, start, end, nextStart) and the derived parameters
(firstStretch, lastStretch, top, bottom). The latter are deduced from the former. Their
definitions are given in the following subsections. The values of those parameters for our
3 vector lifetime example are given in Table 7.1.
Vec
torL
ifet
ime
Out.Int.Only
omega
alpha
singleStart
singleEnd
start
[1]
end[1
]
nextStart
[1]
start
[2]
end[2
]
nextStart
[2]
firstStretch
lastStretch
top
bottom
x true 1 0 0 3 0 3 +∞ +∞ −∞ +∞ 4 4 4 5y false 0 2 1 12 1 7 11 11 13 17 3 4 0 5z false 0 0 6 10 +∞ −∞ 6 6 8 12 +∞ −∞ 0 3
Table 7.1: Register Allocation Parameters Values Example
To help computing the parameters a boolean value named
OutermostIntervalOnly is used. It is set to true when a loop variant is uniquely
defined in the outermost level only. The boolean is only used to compute the parameters
OutermostIntervalOnly =
true , if for any reference ref in refs settype(ref) =USE or level(ref) = 1
false , otherwise(7.1)
7.4.3.1 Core Parameters
singleStart and singleEnd define the first cycle and last cycle + 1 of the scalar
lifetime of the first outermost iteration in the simplest form, respectively. singleStart is
144

therefore equal to the cycle of the first definition of that loop variant in 1-D schedule and
singleEnd is the cycle+1 of the last reference in that same schedule, to which we add the
omega distance omega∗T 2. If the last reference is a definition before the first occurrence
of the ILES (not represented in the simplest form) and a use for that loop variant is present
in the ILES, then the loop variant is still live until the start cycle of that ILES. singleEnd
is then start cycle of the first ILES, namely ln ∗ T .
singleStart = min
{time(ref),
∀ref ∈ refs set such that type(ref) =DEF
}(7.2)
singleEnd = max
{time(ref) + 1 + omega(ref) ∗ T ,
∀ref ∈refs set ∪ {(adjustment,USE, 0, 1)}
}(7.3)
where,
adjustment =
−∞ , if OutermostIntervalOnly
ln ∗ T , otherwise
Omega and alpha are the maximum number of live-in and live-out values, respec-
tively, for the loop variant. Omega can be computed from the references whereas alpha
is assumed to have been computed by an earlier phase of the compiler.
omega = max{omega(r),∀ref ∈ refsset} (7.4)
Start[i] is the issue time of the definition of the variant at level i, which is equal
to its 1-D schedule time. End[i] is 1 + the latest issue time of all possible uses of the
definition. If the definition at level i has no use, end[i] is the 1-D schedule time of the
definition + 1. The variant is live for the duration of the definition. If there is no definition
of the variant at level i, then start[i] and end[i] are set to +∞ and −∞, respectively.
The arbitrary choice is compatible with the subsequent distance computation because we
would have end[i]− start[i] < 0.
2 In [RDG05], singleEnd needs to be adjusted because the simplest form was defineddifferently. Here the adjustment is directly included in the definition of singleEnd
145

The computation of start[i] is straightforward. However end[i] is harder to com-
pute. Let uses(d) be the set of uses of a definition d. An operation u is a use of a definition
d if the control-flow can reach u from d without encountering any redefinition of the loop
variant. Let loopbackOffset(d, u) be the offset due to the execution of a back loop edge.
It corresponds to the execution time of one iteration of the shallowest loop traversed by
the control-flow while flowing from d to u. If d is the definition of the loop variant at level
i, we have:
start[i] =
time(d) , if d is defined
+∞ , otherwise(7.5)
end[i] =
max
time(u) + 1 + omega(u) ∗ T+loopbackOffset(d, u), ∀u ∈ uses(d)
, if d is defined
and uses(d) 6= {}
time(d) + 1 , if d is definedand uses(d) = {}
−∞ , otherwise
(7.6)
7.4.3.2 Derived Parameters
The derived parameters characterize the stretched intervals of the vector lifetimes.
Because the length of a stretched intervals is relative to the number of iterations of the
inner loops, it is unknown at compile-time and cannot be abstracted horizontally in the
space-time diagram as it was done for the core parameters. Instead, the vertical axis,
i.e. the number of registers, is used. There are 4 derived parameters.
firstStretch and lastStretch are the iteration indexes of the first and last
stretched intervals in the first ILES segment. If there is no stretched interval, then they
are set to +∞ and −∞, respectively. Let us consider the first ILES segment. An interval
at iteration index x ≥ 0 at level i is stretched if its definition appears before the first cycle
of the first ILES, and if its last use appears at that same first cycle or later in a different
iteration group. If span = omega when i = 1 and 0 otherwise, those conditions can be
146

formulated as:
start[i] + x ∗ T < ln ∗ T
end[i] + x ∗ T > ln ∗ T
x+ span ≥ Sn
Let first and last be the smallest and largest x values that satisfy the above in-
equalities. Then we have:
first = min∀i∈[1,n]
{max
(0, Sn − span, ln −
⌊end[i]− 1
T
⌋)}
last = max∀i∈[1,n]
{ln −
⌈start[i] + 1
T
⌉}
If first > last, then there is no stretched interval. Also, for single loops (n =
1), there never is any stretched interval. We then have the mathematical definitions of
firstStretch and lastStretch:
firstStretch =
+∞ if n = 1 or first > last
first otherwise(7.7)
lastStretch =
−∞ if n = 1 or first > last
last otherwise(7.8)
The last two parameters characterize the height of the ILES segment. Top is the
iteration index of the top intervals in the ILES and bottom is the iteration index plus one
of the intervals at the bottom of the ILES. If there is no interval in the ILES, then top
and bottom are set to +∞ and −∞, respectively. Two cases arise. If the loop variant is
uniquely defined in the outermost level (outermostIntervalOnly), then the ILES seg-
ment is only made of stretched intervals. Otherwise it is made of Sn intervals from the
147

iteration group being executed and of the stretched intervals of the other iteration groups.
Therefore:
top =
firstStretch if outermostIntervalOnly
0 otherwise(7.9)
bottom =
lastStretch+ 1 if outermostIntervalOnly
max(Sn, lastStretch+ 1) otherwise(7.10)
7.4.4 Minimum Register Distance Computation
Using our representation of the vector lifetimes, we can now compute the min-
imum register distance between any two vector lifetimes. Two minimum distances are
proposed: conservative and aggressive.
7.4.4.1 Conservative Distance
The conservative distance considers the concave envelope of the vector lifetimes
when evaluating the minimum register distance between vector lifetimes. Let us con-
sider two vector lifetimes x and y that have been allocated registers Rx and Ry respec-
tively. We assume that y appears on the right of x in the space-time diagram and we note
d=dist[x, y]=Ry −Rx. Four constraints must be taken into account.
regi
ster
s
0 2*T 3*T 4*T 5*T 6*T 7*T 8*T 9*T1*T 11*T 12*T 13*T 14*T10*T
Rx
Ry
d
singleStart(y)
singleEnd(x)
T
singleStart(y) + d * T − singleEnd(x)
Figure 7.14: Conservative Distance: Wands
148

First the wand of y must be above and to the right of x without overlapping parts
of x. Because in the simplest form the wand is composed of N1 identical scalar life-
times, which are issued every T cycles, one must only ensure that no conflict exists
for the the first scalar lifetime of x for instance. The end of the first scalar lifetime of
x is singleEnd(x). The beginning of the scalar lifetime sharing the same register is
singleStart(y) + (Ry − Rx) ∗ T . There is therefore no conflict if the distance between
the two is positive, i.e. singleStart(y) + d ∗ T − singleEnd(x) ≤ 0.
Second the leading blade of vector lifetime y must not overlap with vector lifetime
x. If omega(y) = 0, then there is no leading blade and therefore no problem. Otherwise,
since leading blades always start from cycle 0, the last scalar lifetime of the leading blade
of y must be above any scalar lifetime of x. The first scalar lifetime of x is assigned to
Rx + omega(x). The last scalar lifetime of the leading blade of y is assigned Ry + 1.
Therefore we must have Ry > Rx + omega(x), i.e. d > omega(x).
Third the trailing blades should not overlap. Using a symmetrical reasoning to the
leading blades issues, we obtain the last condition: d > alpha(x).
Last, the ILES segments must not overlap in the final form of the space-time
diagram. The bottom of vector lifetime y must be above the top of vector lifetime x,
i.e. Ry − bottom(y) ≥ Rx − top(x).
If those four conditions are satisfied, then the vector lifetimes of x and y do not
overlap. The minimum value of d satisfying those conditions is the minimum conservative
distance between x and y. There is no maximum. Those results are summarized in
Figure 7.15.
An example is shown in Figure 7.16 for vector lifetimes x and y. We have
singleEnd(x) = 3 and singleStart(y) = 1, therefore d1 = 1. omega(y) = 0 and
alpha(x) = 0, therefore d2 = d3 = 0. Because Bottom(y) = 5 and top(x) = 4, we have
d4 = 1 and cons[x, y] = [1,+∞[. Once Rx has been set, Ry can legally take any value
between Rx + 1 and above. In the figure, Ry takes the minimum legal value of Rx + 1.
149

d1 =
⌈singleEnd(x)− singleStart(y)
T
⌉
d2 =
{0 , if omega(y) = 0omega(x) , otherwise
d3 =
{0 , if alpha(x) = 0alpha(x) , otherwise
d4 = bottom(y)− top(x)
=⇒ cons[x, y] = [max(d1, d2, d3, d4),+∞[
Figure 7.15: Conservative Distance Computation
regi
ster
s
0 2*T 3*T 4*T 5*T 6*T 7*T 8*T 9*T1*T 11*T 12*T 13*T 14*T10*T
cons
[x,y
]
RxRy
illeg
al
Figure 7.16: Conservative Distance Example
150

7.4.4.2 Aggressive Distance
With the aggressive distance we try to take advantage of the space between inter-
vals to interleave vector lifetimes. For this the simplest form is not sufficient anymore and
one must look at the ideal and final form of the space-time diagrams. Several constraints
must be taken into account.
First, given a loop level i, the intervals at that level must interleave without over-
lapping. In the ideal form (stretched intervals will be dealt with later with the final form),
we consider the intervals from vector lifetimes x and y at level i. The end (start, respec-
tively) of the intervals of y must be before the start (after the end) of the intervals of x.
This is abstracted as starty[i] + d ∗ T ≥ endx[i] and endy[i] + d ∗ T ≤ nextStartx[i],
respectively. If there is no interval for y at level i (starty[i] = +∞ and endy[i] = −∞,
we still need to ensure that the next interval of y at the next loop level does not overlap
with an interval of x at level i, i.e. nextStarty[i] + d ∗ T ≥ endx[i]. Those conditions
give us a lower lx,y[i] and upper bound ux,y[i] for the register distance between the two
vector lifetimes so that interleaving is allowed:
lx,y[i] =
⌈endx[i]−nextStarty [i]
T
⌉, if starty[i] = +∞ and endy[i] = −∞
⌈endx[i]−starty [i]
T
⌉, otherwise
ux,y[i] =
⌊nextStartx[i]− endy[i]
T
⌋
The intersection of the segments [lx,y[i], ux,y[i]] over all the loop levels i is the
range of register distances from y to x in the space-time diagram so that the intervals are
interleaved without overlapping, stretched intervals excluded. The lower and upper bound
of that intersection are given by d5 and d6, respectively, in Figure 7.17.
Then we consider the final form and take into account the stretched intervals. The
stretched intervals of y should be above the stretched intervals of x if any, and below the
151

non-stretched intervals of x in the ILES. We then have the inequalities below that will be
translated into d7 and d8 in Figure 7.17.
Ry − bottom(y) ≥ Rx − firstStretch(x)
Ry − firstStretch(y) ≤ Rx − Sn , if not outermostIntervalOnly(x)
The final segment intl[x, y] is the range of legal distances between vector lifetime
x and vector lifetime y so that the vector lifetimes are interleaved without overlapping. If
empty, interleaving is not possible. To obtain the full range of legal distances, the union
of intl[x, y] and the conservative range cons[x, y] must be made. The result is the range
of legal aggressive distances between x and y. The summary of the computation of the
aggressive distance is shown in Figure 7.17 3.
d5 = max∀i∈[1,n]
{lx,y[i]}
d6 = min∀i∈[1,n]
{ux,y[i]}
d7 = bottom(y)− firstStretch(x)
d8 =
{+∞ , if outermostintervalonly(x)firstStretch(x)− Sn , otherwise
=⇒ intl[x, y] = [max(d5, d7),min(d6, d8)]
aggr[x, y] = cons[x, y] ∪ intl[x, y]
Figure 7.17: Aggressive Distance Computation
In Figure 7.18, we show how the aggressive distance is computed between vector
lifetimes z and y. Using the ideal form, the end of the interval of z in the outermost level,
noted interval 1, and the start of the first outermost interval of y, noted interval 2, do not
3 In [RDG05] there are two extra terms d9 and d10. Because those terms were redun-dant with d2 and d3, they are not used anymore.
152

overlap if dist[z, y] ≥ lz,y[1] = −∞. Because interval 1 does not actually exist, its end
was set to−infty. Similarly intervals 2 and 3 do not overlap if the distance between z and
y is greater than uz,y[1] = −1. For the innermost level, interval 4 must start after the end
of interval 3 and lz,y[2] = −1. And interval 4 must end before the next innermost interval
(5) and uz,y[2] = −1. Therefore d5 = d6 = −1, which means that if dist[z, y] 6= −1, the
vector lifetimes either overlap or are not interleaved.
0 2*T 3*T 4*T 5*T 6*T 7*T 8*T 9*T1*T 11*T 12*T 13*T 14*T 18*T 20*T19*T15*T 16*T 17*T10*T
zy1 2 3 4 5
(a) Ideal Form
0 2*T 3*T 4*T 5*T 6*T 7*T 8*T 9*T1*T 11*T 12*T 13*T 14*T 15*T 16*T 17*T 20*T19*T18*T 21*T 22*T 23*T 24*T 25*T 26*T 27*T 28*T 29*T 30*T 31*T 32*T10*T
yz
6
78
9
(b) Final Form
Figure 7.18: Aggressive Distance Example
Using the final form in Figure 7.18(b), the constraints of the stretched intervals are
taken into account. For the interleaving to be legal, the first stretched interval of y, interval
7 in the figure, must be below the non-stretched intervals of z, represented by interval 6.
Also the last stretched intervals of y, interval 8, must be above the first stretched interval of
z (non-existing in this example, but still represented as interval 9). Those two conditions
lead to d7 = −∞ and d8 = 0. Finally we obtain intl[z, y] = [−1,−1].
153

7.4.4.3 Property
As for the schedule function, the register distance formulas subsume single loops
as a special case.
Property 7.1 Given a single loop L and two vector lifetimes x and y of L, cons[x, y] =
aggr[x, y] = [l,+∞[ where l is the minimum register distance calculated using Rau’s
register allocation for single loops [RLTS92].
Proof. In a single loop a vector lifetime is made of a single interval per scalar lifetime
and start[1] = singleStart, end[1] = singleEnd, and nextStart[1] = +∞. Because
there is no ILES segment, we also have firstStretch = +∞, lastStretch = −∞,
top = +∞, and bottom = −∞. We have to prove that both the conservative and the
aggressive distances are equal to the distance defined by Rau.
For the conservative distance, because bottom = −∞, we have d4 = −∞ and
cons[x, y] can be rewritten as [max(d1, d2, d3),+∞[. The definition of the conservative
distance is then identical to the definition of the minimum register distance in Rau’s algo-
rithm.
For the aggressive distance, d7 and d8 are set to −∞ and +∞, respectively. Be-
cause nextStart[1] is equal to +∞, we have ux,y[1] = +∞, and d6 = +∞. Finally we
obtain:
lx,y[1] =
⌈endx[i]− starty[i]
T
⌉=
⌈singleEndx − singleStarty
T
⌉= d1
Therefore intl[x, y] = [d1,+∞[ and aggr[x, y] = cons[x, y]. �
7.4.5 Lifetimes Insertion
After being sorted, the vector lifetimes are inserted onto the surface of a space-time
cylinder of circumference equal to R, the number of physical rotating registers available
on the target architecture. It would be possible to insert lifetimes on a space-time cylinder
with an infinite circumference. However, because the number of physical registers is
154

limited, it is convenient to know as early as possible when there are not enough registers
available for a schedule. The algorithm is shown in Figure 7.19. Inserting a vector lifetime
on the space-time cylinder means assigning a physical register to that lifetime.
INSERTION():dist← cons or aggrstrategy ← best fit or first fit or end fitfor each vector lifetime v dolegal regs[v] = [0, R− 1]
end for
for each non-inserted vector lifetime v dorv ← choose register in legal regs[v] using strategy strategyassign register rv to vector lifetime vfor each other non-inserted vector lifetime u dolegal regs[u]← legal regs[u]− new illegal(u, v, R)
end forend for
where:
new illegal(u, v, r) = {i mod r such that i /∈ (rv − dist[u, v]) ∪ (rv + dist[v, u])}
Figure 7.19: Lifetime Insertion Algorithm
The algorithm does not backtrack and any assignment decision is final. For each
vector lifetime v, the set of legal registers that can be assigned to v without any risk of
overlapping with already placed lifetimes is stored in legal regs[v]. As more vector life-
times are placed on the space-time cylinder, the set of legal registers of the vector lifetimes
which have not been assigned any register yet is updated using new illegal(u, v, r).
new illegal(u, v, r) is the set of registers which cannot be assigned to u after
inserting v on a space-time cylinder of circumference of r. In other words, if u was
assigned any register in new illegal(u, v, r), then u and v would overlap. The set is
defined modulo r to take into consideration the cyclic nature of the cylinder. rv+dist[v, u]
155

represents the set of registers that can be allocated to u without any conflict with v if u is
to be inserted above v. Otherwise the set of legal registers is given by rv − dist[u, v].
axis of the space−time cylinder
vr
legal_regs[u] withaggressive distanceconservative distance
legal_regs[u] with
r v + cons[v,u]
r v − cons[u,v]
r v − intl[u,v]
+ intl[v,u]r v
Figure 7.20: Lifetime Insertion Example
Figure 7.20 shows the legal regs set of vector lifetime u after assigning register
rv to vector lifetime v. If the aggressive distance is used, the set of legal registers is larger.
7.4.6 Circumference Minimization
At this point all the vector lifetimes have been placed on the surface of space-time
cylinder of circumference equal to the number of physical registers available in the target
architecture, R. The next step is to minimize that circumference to minimize register
usage. The algorithm is shown in Figure 7.21.
First the registers assigned to the vector lifetimes are reindexed to start at index 0.
Then the circumference of the space-time cylinder is initialized a tight lower bound: the
difference between the lowest and highest register used. From there, the circumference
is tested. If any vector lifetime overlaps itself and another vector lifetime, the circumfer-
ence is incremented by one. As soon as no overlapping is detected the algorithm stops.
The current circumference is the minimum number of rotating registers required by the
156
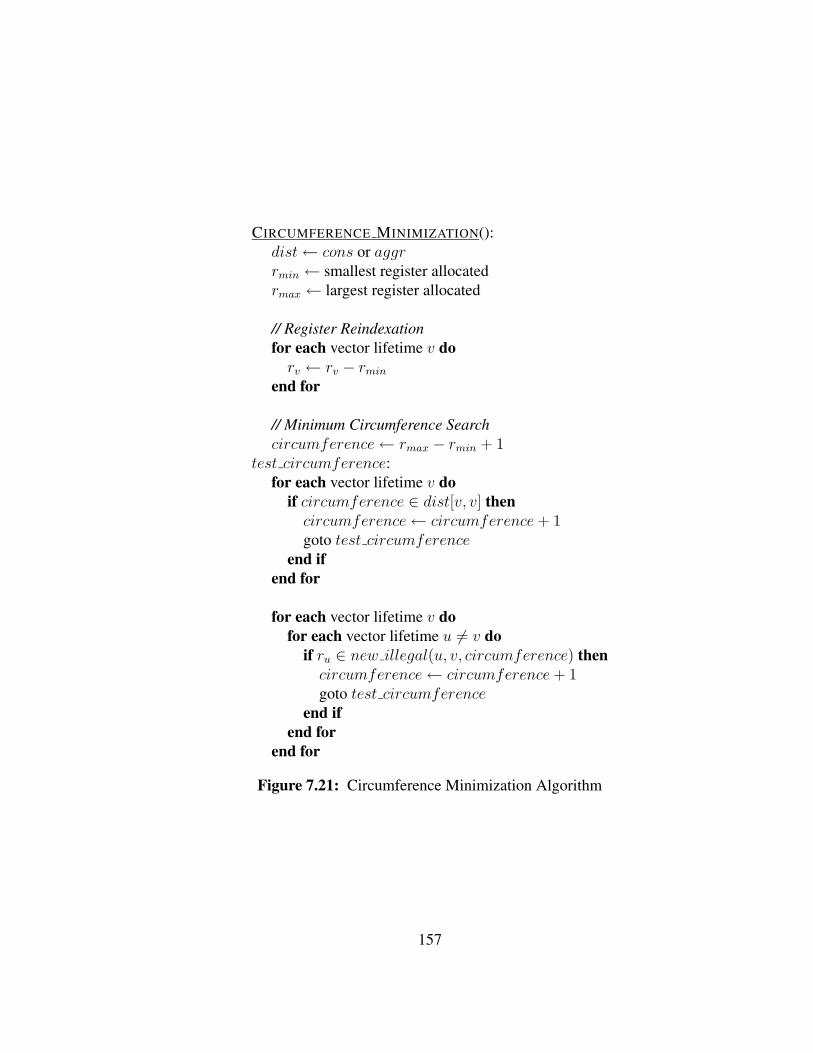
CIRCUMFERENCE MINIMIZATION():dist← cons or aggrrmin ← smallest register allocatedrmax ← largest register allocated
// Register Reindexationfor each vector lifetime v dorv ← rv − rmin
end for
// Minimum Circumference Searchcircumference← rmax − rmin + 1
test circumference:for each vector lifetime v do
if circumference ∈ dist[v, v] thencircumference← circumference+ 1goto test circumference
end ifend for
for each vector lifetime v dofor each vector lifetime u 6= v do
if ru ∈ new illegal(u, v, circumference) thencircumference← circumference+ 1goto test circumference
end ifend for
end for
Figure 7.21: Circumference Minimization Algorithm
157
schedule. Because we already know that no overlapping occurs with a circumference of
R, the algorithm is guaranteed to converge.
7.4.7 Time Complexity
Let nv be the number of vector lifetimes and no the number of operations in the
schedule. The lifetime normalization and representation algorithms have a time complex-
ity of O(no) per loop variant and an overall complexity of O(no ∗ nv). The time spent
computing distances for all the pair of loop variants is O(n2v). Sorting can be done in
O(n2v). The vector lifetime insertion uses the same strategies as in [RLTS92], and there-
fore run in O(n2v) for first and end fit, and O(n3
v) for best fit. Finally the circumference
minimization runs in O(n2v). Overall the register allocation algorithms have a time com-
plexity of O(n2v + nv ∗ no) with first or end fit and O(n3
v + nv ∗ no) with best fit.
7.5 Experimental Results
The register allocation method was implemented, alongside with the rest of the
SSP framework, in the ORC 2.1 compiler. The input of the register allocator is the kernel
produced by the scheduler (Chapter 5) and the output is a register-allocated kernel to be
sent to the code generator (Chapter 8).
7.5.1 Experimental Framework
The vector lifetimes were sorted in increasing order by adjacency. Ties are bro-
ken using singleStart, then adjustedSingleEnd modulo T . The adjacency between
two vector lifetimes v and u represents the number of cycles a register is idle. It is de-
fined as singleStart(u) − singleEnd(v) + d3(v, u) ∗ T . The heuristic is an extension
to the (adjacency, start time) heuristic used in the traditional register allocation for single
loops [RLTS92].
Seven different strategies were used for the insertion of vector lifetimes on the
space-time cylinder. The first, referred to as Simple, ignores the specific shape of a
158

vector lifetime u and exclusively allocates to it S+omega(u) physical registers, which is
the maximum number of instances of a loop variant that can be live simultaneously in the
final schedule (S is the number of stages in the SSP kernel). The two register distances,
conservative and aggressive, were tested combined with the three strategies introduced
in Section 7.2: first fit, best fit, and end fit. The 6 combinations are named Cons-
First, ConsBest, ConsEnd, AggrFirst, AggrBest, and AggrEnd, respectively. Besides,
the register pressure of the schedule, MaxLive (Section 6), was measured for comparison.
Depth 1 2 3 4 5Number 127 108 68 33 12
Table 7.2: Depth of the Tested Loop Nests
A total of 134 loop nests were gathered from NAS, Livermore and SPEC2000
benchmark suites. To test the register pressure related with different levels, SSP was ap-
plied to each feasible level, leading to a total of 348 loop levels tested. Note that even
for the same variant in the same source code, software pipelining of two different levels
results in completely different vector lifetimes. The distribution of the depths of the loop
nests is shown in Table 7.2. The space-time cylinder was assumed a maximum circumfer-
ence of 1024 registers. When the number of registers allocated did not exceed 96 rotating
integer and floating-point registers, the total rotating registers in Itanium architecture, the
parallelized loop nest was run on an Itanium2 machine, and correctness was validated by
comparing its output with that of the same loop nest compiled with GCC or the original
ORC 2.1 binary.
Overall, 60% of the loops have 47 operations or less , but 12% of the loops have
more than 200. 64% of the loops have an II of less that 10 cycles, and 8.4% of them have
an II larger than 40 cycles. Note that, because a smaller II may be related to a higher
number of stages, it tends to increase the register pressure. 80% of the loops have 56
integer loop variants or less and the maximum is 174. For floating-point loop variants,
159

80% of the loops has less than 45 with a maximum of 96. The total number of stages
never exceeds 11 and the number of live-in values never goes above 7.
7.5.2 Register Requirements
The register requirements for each distance-strategy combination are shown in
Figure 7.22. The curves are cumulative distribution curves. Each one indicates the per-
centage of loop nests whose register-allocated schedule requires a given number of regis-
ters. The curves are surrounded by the register requirement curves of Maxlive and Simple.
Those two curves are the lowest and upper bound, respectively. The Maxlive curve rep-
resents the minimum register requirement that would be achieved by an ideal register
allocator. As such, the closer a curve is to the Maxlive curve, the better is the register
allocation solution. The maximum number of available physical rotating registers, 96, is
represented by a vertical bar.
At a first look, we can distinguish 3 groups of curves. The first group includes the
curves from the 3 combinations using the conservative distance. It is the lowest group on
both graphs. The second group includes the curves from the aggressive distance solutions,
combined with best or first fit. It is the highest group on both graphs. The two curves are
almost identical. The last group is composed of a unique curve: the aggressive distance
solution combined with the end fit strategy. It is the curve in the middle.
Using the Simple register allocation scheme, only 30% of the loop nests requires
96 registers or less. Using the conservative distance, the rate increases to 53%, and then
to almost 92% with the aggressive distance. Overall the proposed register allocation
allows 76.5% of the loop nests to be compiled with 96 registers or less. This result
confirms the importance of exploiting the specific patterns of the vector lifetimes in SSP
schedules. A deeper analysis of the register allocation solutions revealed in some cases
up to 4 vector lifetimes interleaved with each other when the aggressive distance is used.
That phenomenon was not uncommon.
160

100%
80%
60%
40%
20%
100 200 300
Perc
enta
ge o
f Loo
p N
ests
Number of Registers Required
Maxlive
Simple
AggrBestAggrFirstAggrEndConsBestConsFirstConsEnd
(a) Integer Registers
100%
80%
60%
40%
20%
100 200 300
Perc
enta
ge o
f Loo
p N
ests
Number of Registers Required
Maxlive
Simple
AggrBestAggrFirstAggrEndConsBestConsFirstConsEnd
(b) Floating-Point Registers
Figure 7.22: Cumulative Distribution of the Register Requirements for the Loop Nestsof Depth 2 or Higher
161

Moreover the register requirement curves of the register allocation solutions us-
ing the aggressive distance combined with first or best fit appear extremely close to the
Maxlive results. Considering the fact that Maxlive is not a tight lower bound, the result is
even more encouraging.
7.5.3 Lifetime Insertion Strategies
When the conservative distance is used, the vector lifetime insertion strategy is
not relevant. The three strategies are equivalent. However, with the aggressive distance,
the first and best fit strategies curves are indistinguishable and very close to the Maxlive
curve. Those two combinations succeeds in compiling 15% more loops than the aggres-
sive distance-end fit combination.
Nevertheless the advantage goes to the first fit strategy. When comparing the com-
pilation time of both the first and best fit strategies during the lifetime insertion step, it
appears that the first fit strategy is 3 orders of magnitude faster. The cubic factor in the
time complexity results plays a very important role.
7.5.4 Execution Time
Does a lower register requirement have a significant impact on run-time perfor-
mance? To measure it, we considered the 18 loop nests that had a register requirement
of 96 registers or less with the aggressive distance-first fit combination but more than 96
with the conservative distance-first fit combination. For those loop nests, the scheduler
was asked to recompute a schedule with a longer initiation interval. A direct consequence
is a reduced number of stages, and therefore a reduced number of lifetimes interfere and
number of registers required. The initiation interval is allowed to grow as large as neces-
sary to accommodate the 96 registers of the Itanium architecture.
Of the 18 loop nests that could not be register allocated, still 11 could not be
compiled with the Simple method and 5 with the conservative distance method. Indeed
the register pressure stops decreasing after a certain threshold, as already observed in
162

[LVA96]. For the other loop nests that could be compiled, the schedule was compared to
the original schedule. On average, the initiation interval of the Simple and conservative
distance solutions were 81% and 25% larger, respectively. And the execution time was
69% and 28% longer, respectively.
7.5.5 Single Loops
The algorithm was also applied to 127 single loops. As expected, the aggres-
sive and conservative distances were identical and the results matched the ones from
Rau [RLTS92]. The SSP register allocation subsumes single loops as a special case.
7.6 Related Work
The solution proposed in this chapter is currently register allocation proposed
for SSP schedules. Several other register allocation methods for modulo schedules ex-
ist [EDA94, EDA95, GAG94, WKEE94, NG93, HGAM92]. However they cannot be
applied to loop nests.
Existing methods for allocating registers for loop nests [HGAM92, CK91] are
extensions of the traditional graph coloring approach [Cha82] and do not aim at soft-
ware pipelining. However, lifetimes in a software pipelined loop have regular pat-
terns [RLTS92], which should be taken advantage of by an efficient register allocator.
Traditional software pipelining of loop nests [Lam88, MD01] centers around scheduling,
with little discussion on register allocation.
7.7 Conclusion
This chapter presented a software-pipelined loop nest register allocation scheme,
which can be applied to SSP kernels. Vector lifetimes of an SSP schedule have features
that do not have vector lifetimes in modulo scheduled single loops. A scalar lifetime is
composed of multiple intervals and multiple levels. Some intervals are stretched and are
163
not issued at regular intervals. The shape of a vector lifetime is not a convex polygon, but
a set of multiple intervals and holes between those.
The proposed solution takes advantages those holes to interleave the vector life-
times and reduce the overall register requirements of the SSP schedule. Thanks to an
accurate representation of the vector lifetimes, a range of legal distances between vec-
tor lifetimes is computed. A distance is deemed legal if the two vector lifetimes do not
interfere during the entire execution of the schedule. Using that information, the vector
lifetimes are placed one after the other on the surface of a space-time cylinder of circum-
ference equal to the number of physical registers of the target architecture. Afterward the
circumference is reduced as much as possible. The final result is the register allocated
kernel.
Experiments show that the method is very efficient and that interleaving vector
lifetimes is a sine qua non condition to reduce the register requirements of an SSP sched-
ule. The best heuristic (interleaving allowed and first fit strategy) allocates almost the
minimum number of registers required. If no interleaving is allowed, the quality of the
solutions quickly deteriorates. Results also show that, when the number of registers re-
quired exceeds the number of physical registers available in the target architecture, the
execution time of the schedule greatly suffers.
164
Chapter 8
CODE GENERATION
8.1 Introduction
This chapter describes the last step of the SSP framework described earlier in
Figure 3.6: the code generation. At this point in the framework, the kernel has been
computed and registers have been assigned to the loop variants of the loop nest. The
final step consists of generating the final schedule in assembly code using the the register-
allocated kernel.
The task is more complex than in the single loop case encountered by MS. The
code generator is now faced with different repeating patterns, one per loop level in the
loop nest. The overlapping live ranges must in turn also be taken into consideration and
require a separate level of register assignment for each loop level. Other issues related to
the loop overhead instructions management, the level separation constraint, the initializa-
tion/finalization of the SSP pipeline and the code size issue must also be solved. Those
issues are presented in more details in Section 8.2.3.
In this chapter we make the difference between code generation and code emis-
sion. The latter is a part of the former. Code emission is the process of writing assembly
instructions into the assembly file, whereas code generation is the process of computing
what should be written into the assembly file.
The rest of the chapter is organized as follows. First a more formal description
of the code generation problem is proposed where the different patterns and issues are
explained in details. Then our solution for the EPIC architecture is presented. Finally the
experimental results are analyzed before concluding.
165

8.2 Problem Description
8.2.1 Notations
Before giving a formal problem formulation some notations are needed. We
present here in details the different repeating patterns appearing in the final schedule.
Some examples have already been presented in Chapter 3.4. We make the difference be-
tween double loop nests and loop nests of depth 3 or higher. Single loops are generated
the same way as with MS and are not mentioned here.
8.2.1.1 Double Loop Nest
To describe the different phases and repeating patterns of the final schedule ap-
pearing in double loop nests, we use a different example from Section 3.4.2. The kernel
is shown below:
op1
op2op3
op4
op5
op6
abcde
Figure 8.1: Double Loop Nest Kernel
The corresponding final schedule is shown in Figure 8.2. Because the initiation
interval of each level is not relevant for our discussion, the number of cycles within each
stage is not represented. The final schedule can be partitioned into 3 different phases: the
outermost filling phase, the stable phase, and the outermost draining phase.
The stable phase is iterated as many times as needed and corresponds to the exe-
cution of the loop nest once the software-pipeline has been filled. It is composed of two
repeating patterns: the Outermost Loop Pattern (OLP) and the Innermost Loop Pattern
(ILP). The former issues the outermost iterations whereas the latter corresponds to the
execution of the innermost loop. The OLP is made of Sn consecutive copies of the entire
kernel. The ILP is also made of Sn copies of the kernel. However only the innermost
166
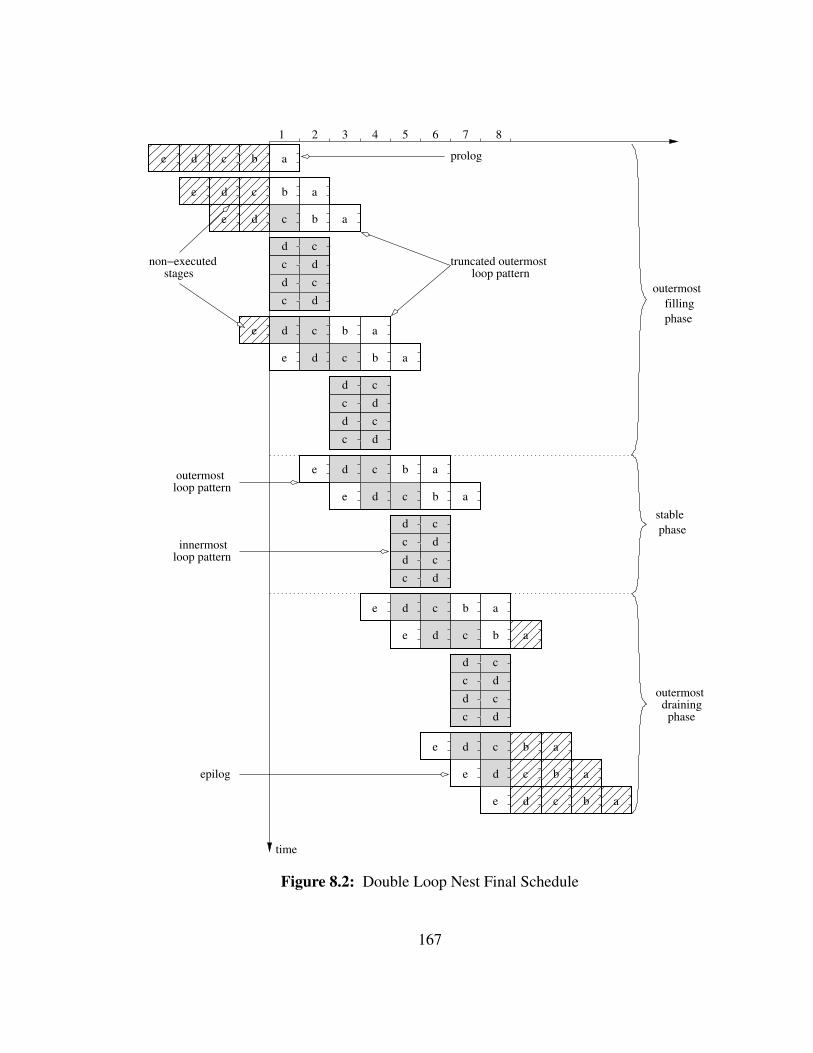
cddccddc
e d c b a
e d c b a
cddccddc
e d c b a
e d c b a
cddccddc
e d c b a
e d c b a
cddccddc
e
e d
e d c
e b a
c b a
e b a
b a
a
c
b
d
c
b a
d c
e d
d c
truncated outermostloop pattern
prolog
epilog
outermost
stablephase
outermostdraining
phase
fillingphase
loop patternoutermost
innermostloop pattern
non−executedstages
7654321 8
time
Figure 8.2: Double Loop Nest Final Schedule
167
stages are taken into consideration. Moreover, each new copy rotates the order of appear-
ance of the stages. In our example the first copy is made of stages c, then b, whereas the
second copy is made of stages b and c in that order.
The initialization phase corresponds to the part of the schedule before the stable
phase when the software-pipeline is being filled up. It is equivalent to the stable phase
from which we remove the stages from the non-existent previous outermost iterations
(i.e. iterations -1, -2, ...). It includes the Prolog and an alternated appearance of Truncated
OLPs and ILPs similar to the stable phase. The prolog can be seen as truncated OLPs
without the presence of ILPs in-between.
The conclusion phase is the symmetric opposite of the initialization phase and
corresponds to the part of the schedule after the stable when the software-pipeline is
being drained. It is equivalent to the stable phase from which we remove the non-existent
next outermost iterations (i.e. iterations N, N+1, ...). It includes an alternated appearance
of truncated OLPs and ILPs, and the Epilog. The epilog can also be seen as truncated
OLPs with the presence of ILPs in-between.
Therefore the entire final schedule can be derived from the kernel. More specif-
ically one only needs to be able to emit the prolog, the OLP (truncated or full), the ILP
and the epilog to generate the whole assembly code of the schedule.
8.2.1.2 Triple or Deeper Loop Nest
If the loop nest is becomes deeper a new type of repeating pattern appears: the
Draining & Filling Pattern (DFP). This pattern was first shown in Section3.4.3. The
kernel and final schedule are reproduced in Figure 8.3 and Figure 8.4 respectively.
The DFP corresponds to filling and draining phases of the intermediate loop levels.
The pattern is an extension of the ILP. A DFP of level 1 < i < n is composed of Si copies
of the kernel. However each copy only includes Sn stages from the subkernel Ki. The
order of appearance of the stages rotates after each copy. For instance, in our example,
subkernel K2 is composed of S2 =4 stages e, d, c, b. The corresponding DFP is made of
168

op6
op7
op8
op9
efop1
op2
op3
op4
op5
abcd
Figure 8.3: Triple Loop Nest Kernel
S2 copies of the kernel which feature first stages d, c, second stages e, d, then b, e, and
finally c and b.
The final schedule for triple loop nest is then composed of the same phases than
in the double loop nest case. However the ILP is replaced by the Inner Loops Execution
Segment (ILES). The ILES us made of the ILP and the DFP of the intermediate loop levels
as shown in Figure 8.4.
Therefore, for triple or deeper loop nests, the final schedule can also be derived
from the kernel and only only needs to know how to emit the OLP, ILP, DFP and pro-
log/epilog.
8.2.2 Problem Statement
The code generation problem can then be formulated as follows: Given an SSP
register-allocated kernel, generate the final schedule in the assembly language of the
target architecture. The final schedule naturally includes the operations present in the
kernel but also the loop overhead instructions such as branches and register rotations.
The solution must also manage the different loop counters for each loop level.
The solution must tackle several issues that are presented in the next sections.
Most importantly, a different architecture may mean an entire new set of solutions to those
issues. In this chapter, the solution for the Itanium architecture is studied into details. A
very different solution will be presented later for the IBM 64-bit Cyclops architecture in
Chapter 9.
169

time
ccd
dc
cd
d
debc
cd
be
ccd
dc
cd
d
d c b ae d c b a
eff
d c b ae d c b a
c b a
a
b a
ab
bc
d ce d
eff a
ab
bc
d ce d
eff a
f
f
ef
ab
bc
d ce d
eff a
Innermost LoopPattern (ILP)
Draining & FillingPattern (DFP)
Innermost LoopPattern (ILP)
Outermost LoopPattern (OLP)
Outermost LoopPattern (OLP)
1 765432 8Prolog
Folded ILES
Epilog
Segment (ILES)Inner Loop Execution
Figure 8.4: Triple Loop Nest Schedule
170

8.2.3 Issues
Several important issues must be solved to ensure the correctness and performance
of the final assembly code.
First the code should be as compact as possible and code duplication avoided.
Repeating patterns should be taken advantage of using branches. Ideally the final code
for the entire loop nest should fit in the L1 instruction cache of the target architecture.
The branches and loop counters must be efficiently used to minimize loop overheads. A
trade-off may have to made to find a compromise between the run-time performance of
the schedule and the code size.
Once the layout of the code has been decided, special attention should be paid to
the number of iterations for each loop level. An unfriendly number of iterations might
require extra code. For instance, if the number of outermost iterations is not a multiple
of Sn, then the last group of outermost iterations of the final schedule will not be full as
in the double loop nest example in Figure 8.2. In that situation, the outermost draining
phase includes an extra OLP and ILP to flush the pipeline. The loop counter initialization
must be adjusted as well.
Hence the next issue: the truncated versions of the OLP must be efficiently han-
dled to avoid code duplication. Depending on the architecture, it might not always be
possible.
Another important issue is the overlapping lifetimes. The register allocation phase
made sure that enough registers are available for the code to run properly when all the
stages are executed in parallel in the presence of rotating registers. The registers have
already been assigned to the variants in the kernel. The issue arises when no rotating reg-
isters are available. For the Itanium architecture, it happens for the inner levels. Registers
can be rotated for the outermost loop, but not for the innermost. The architecture only
supports one level of register rotation. In the IBM 64-bit Cyclops architecture, there is no
rotating register support.
171

Finally the innermost level separation constraint needs to be addressed as well.
The same stage may contain operations from different loop levels. Only the operations
from the pattern being emitted must be considered.
Although the multiple initiation interval may appear as being an issue, it is not
the case. Indeed the empty slots in the kernel do not contain any operation that would
increase the number of cycles of a stage.
Table 8.1 shows how each issue will be solved depending on the target architec-
ture. The code generation details for the IBM 64-bit Cyclops architecture are presented
in the next chapter.
Issue Itanium Cyclopscode layout andloop counters
cf. algorithm cf. algorithm
code size reduction branches code duplicationtruncated OLPs predication code duplication
lifetimes interference register rotation andcode duplication
register copy andcode duplication
innermost levelseparation constraint
conditional statements conditional statements
Table 8.1: Code Generation Issues and Solutions for Both Target Architectures
8.3 Solution
The proposed solution targets the Itanium architecture and takes advantage of the
available hardware support for software-pipelining, namely register rotation, predication
and dedicated loop counters. The layout of the final code is presented in the next section.
The details are explained afterwards.
8.3.1 Code Layout
A generic layout of the final code for an imperfect loop nest is shown in Figure 8.5.
It is an high overview where the for loops must be expanded in assembly code and a
pattern [pattern] is replaced by the corresponding assembly code in Figure 8.6.
172

[Initialization][Prolog]
Loop:[OLP]in0 ← 1for i2 = 0, N2 − 1 do
for i3 = 0, N3 − 1 do. . .
for in = in0 , Nn − 1 do[ILP]
end forin0 ← 0
. . .if i3 < N3 − 1 and S3 > Sn then
[DFP3]in0 ← 1
end ifend forif i2 < N2 − 1 and S2 > Sn then
[DFP2]in0 ← 1
end ifend forbr.ctop Loop
[Epilog]
Figure 8.5: Generated Code Skeleton
Overall we recognize n nested loops. However the structure of the outermost loop
differs from the original loop nest. The main branch instruction at the end will not be
executed N1 times, but N1/Sn − fn as other branch instructions appear within the OLP
and the prolog.
The body of the innermost loop is executedNn−1 orNn−2 times. Indeed the OLP
already includes one iteration of the innermost stages. Therefore the first execution of the
innermost after an OLP must decrease its iteration count to take this fact into account. A
special case appears in loop nests of depth 3 or more. If one level j contains as many
173

stages as the innermost level (Sj = Sn), the innermost loop must be executed Nn times
instead of Nn − 1. It is the purpose of the in0 variable to represent this special situation.
If Sj > Sn for all loop levels j, then the in0 = 1 and the code for the handling for that
variable does not have to be emitted.
Symmetrically the a DFP at level l is always followed by an ILP, except for the last
iteration of level l for the current outermost iteration. Then the execution of the innermost
loop is followed by the execution of the OLP again. Therefore an if statement is needed at
the end of loop level l to determine if the DFP code of that level should be executed or not.
If code size is not an issue, those loop overheads can be removed and code duplication of
the ILP could be used instead.
8.3.2 Repeating Patterns Emission
The repeating patterns appearing in Figure 8.5 are expanded as shown in Fig-
ure 8.6. For each pattern, two expansions solutions are proposed. The first uses code
duplication to minimize the loop overheads. The second uses loops to minimize code size
expansion. The stages are emitted using the stage() function, which algorithm is shown
in Figure 8.7.
First there is no difference between the two versions of the ILP and DFP. Indeed,
the Itanium architecture only supports one level of register rotation and code duplica-
tion with register offsetting (true boolean flag) must be used to overcome that hurdle.
Section 8.3.6 explains how. Moreover the expansion technique for the ILP and DFP is
identical and [ILP]=[DFPn].
The same could be said about the OLP, Epilog and Prolog. The three patterns are
expanded in very similar ways. Each truncated or whole copy of the kernel is followed
by a command to rotate the registers. We made the arbitrary choice to assign the single
level of rotating registers to the outermost loop. The decision was motivated by the fact
that the truncated or whole OLPs are always larger in terms of number of operations than
the ILP. Since register rotation allows us to circumvent code duplication, the benefit in
174

Minimizes Loop Overheads Minimizes Code Size[Prolog] = [Prolog] =
stages(1,f1,f1,1,0,false) for i = f1, fn-1 dorotation & decrement stages(1,fn-1,f1,fn-f1,0,false)stages(1,f2,f1,2,0,false) rotation & decrementrotation & decrement end for. . .stages(1,fn-1,f1,fn-f1,0,false)rotation & decrement
[OLP] = [OLP] =stages(1,l1,f1,S,0,false) for i = 1, Sn-1 dorotation & decrement stages(1,l1,f1,S,0,false). . . rotation & decrementrotation & decrement end forstages(1,l1,f1,S,0,false) stages(1,l1,f1,S,0,false)
[ILP] = [ILP] = samestages(n,ln,fn,Sn,1,true)stages(n,ln,fn,Sn,2,true). . .stages(n,ln,fn,Sn,Sn-1,true)
[DFPlevel] = [DFPlevel] = samestages(level,ln,fn,Sn,1,true)stages(level,ln,fn,Sn,2,true). . .stages(level,ln,fn,Sn,Sl-1,true)
[Epilog] = [Epilog] =EC ← l1-fn+1 EC ← l1-fn+1stages(1,l1,fn,l1-fn+1,0,false) epilog:rotation & decrement stages(1,l1,fn,l1-fn+1,0,false)stages(1,l1,fn+1,l1-fn,0,false) br.ctop epilogrotation & decrement. . .stages(1,l1,l1,1,0,false)rotation & decrement
Figure 8.6: Patterns Expansion
175

terms of code size is greater. When register rotation is used, register offsetting is turned
off (false boolean flag).
STAGES(level,last,first,num,stage ofst,must offset registers):reg ofst← 0if must offset registers thenreg ofst← (stage ofst%Sn)− 1
for cycle = 1, T docount← num
stage← last− stage ofstwhile stage ≥ first and count > 0 do
emit ops(level,stage,cycle,reg ofst)stage← stage− 1count← count− 1
end while
stage← lastwhile count > 0 do
emit ops(level,stage,cycle,reg ofst)stage← stage− 1count← count− 1
end while
end for
Figure 8.7: Stages Emission
The OLP, DFPl and ILP are composed of S, Sl, and Sn copies of the kernel,
respectively, as presented in Section 8.2.1. A copy of the kernel is emitted using the
stage() function. Six parameters are required. The first parameter is the level of the
pattern, The next two parameters, last and first, indicate the stages of the kernel to
consider for emission. Those are stages last, last − 1, . . ., first + 1, first. They
form a cyclic list whose entry point is stage last − stage ofst, where stage ofst is the
fifth parameter. The fourth parameter, num, is the number of stages to emit starting
from the entry point. num is not necessarily equal to the number of stages considered
176

(last − first + 1). Finally, the last parameter, must offset registers, is a boolean to
indicate if the index of the rotating registers should be adjusted when code duplication is
used (Section 8.3.6).
The stage() function works as follows. It emits num stages starting from stage
last − stage ofst. Because the list of stages to consider is cyclic, when stage first is
encountered, the emission restarts from stage last. This explains the presence of the two
while loops. If a register offset is necessary for the rotating registers, the value (explained
later) is computed once and for all at the beginning and used for all the operations of all
the stages being emitted. The operations of stage s at cycle c with register offset r are
emitted using the routine emit ops(level, s, c, r). The stages are emitted one cycle at the
time. For each cycle, the operations from all the stages at that cycle are emitted.
8.3.3 Loop Control
The loop controls are tightly coupled with the target architecture. In the case of
the Itanium architecture, some hardware support, originally targeted to MS loops, can be
used: (1) a single rotating register file including general-purpose, floating-point and pred-
icate registers, (2) dedicated loop counters LC (loop counter) and EC (epilog counter),
and (3) a dedicated branch instruction br.ctop which rotate the registers, decrement the
loop counters and conditionally branch to a given location in the program.
Because register rotation rotates the entire rotating register file and because no
mechanism to selectively rotate a subset of that register file, register rotation can only
be used for a single loop level. We chose the outermost loop level. And because the
register rotation can only be triggered by the br.ctop instruction which also decrements
the dedicated loop counters, those counters are also attributed to the outermost loop.
Our code generation scheme reflects this limitation. The main loop loop in Fig-
ure 8.5 iterates with the br.ctop instructions. The prolog, OLP, and epilog only need to
rotate the registers and decrement the dedicated loop counters without branching to loop :.
177
Such a feature is accomplished through a simple programming trick: a call to br.ctopwith
the destination address set to the next line in the code. For instance,
br.ctop next line:
next line: ...
The other loop levels use common conditional branches and general-purpose reg-
isters for loop counters. Register rotation is replaced by Modulo-Variable Expansion
(MVE) [RLTS92]. For clarity purposes, the loop controls of the inner loops are noted in
Figures 8.5 and 8.6 in pseudo-code using the for instruction.
8.3.4 Conditional Execution of Stages
In the prolog, epilog, and sometimes in the OLP, when the number of iterations is
unfriendly, some stages should not be executed. For instance, if the code-size optimized
version of the prolog is used, we have a singly copy of a truncated kernel. That copy
contains fn − f1 stages. However the first time the copy is reached, only stage f1 should
be executed. The second, f1 and f1 + 1. Not all the emitted stages are executed.
Such situations are automatically handled by using the rotating predicate registers
of the Itanium architecture. The operations of the kernel are predicated. The predicate
register of the operations in stage f1 is p16, f1+1 p17,... The predicate registers p64−p16
are first set to 0x001 in the initialization phase. As new outermost iterations are issued
(by calling the br.ctop instruction), the predicate registers are rotated, p16 is set to 1, and
consequently entire stages are enabled.
When draining the pipeline, the same technique is used. Then LC = 0. When
br.ctop is called, the predicate registers are rotated, p16 is set to 0, and whole stages are
therefore disabled. The exact behavior of the predicate registers in the Itanium architec-
ture is explained in Section 2.2 and in [Int01].
178

8.3.5 Loop Counters Initialization
For the inner loops, the loop counters are general-purpose registers initialized to
the number of iterations in the original loop nest.
For the outermost loop, the initialization of LC and EC is related to the behavior
of the br.ctop instruction. When LC > 0, the instruction decrements LC by one, rotates
the registers (p16 = 1), and the branch is taken. EC is not touched. When LC = 0,
the instruction decrements EC by one, rotates the registers (p16 = 0), and the branch is
taken. When LC = 0 and EC = 1, the execution falls through.
When initializing the two counters in [Initialization], we must have in mind to
disable unnecessary stages if the N1 is not a multiple of Sn as explained in Section 8.3.4,
and to exit when all the outermost iterations have been issued. The latter is ensured using
LC, while the former is ensure using EC, initialized to:
LC ← N1 − 1
EC ← ln − (N1 − 1)%Sn
LC is initialized to the number of outermost iterations minus one. When LC
reaches 0, N1 − 1 outermost iterations have been issued. The last outermost iteration
remains to be issued. Before reaching the ILP, that last iteration must execute ln − 1
stages and br.ctop instructions. If the number of outermost iterations is not a multiple
of Sn, that number must be adjusted by (N1 − 1)%Sn. Since the execution falls through
when EC = 1, EC is initialized to ln − (N1 − 1)%Sn. When reaching the epilog, LC is
kept null and EC is reset to l1−fn+1, the number of iterations to drain before executing
the epilog code.
8.3.6 Register Rotation Emulation
The input of the code generator is a register-allocated kernel. All the variants
present in the kernel have been assigned a register. That assignment was made with the
assumption that registers could be selectively be rotated at run-time. Ideally, the target
179

architecture offers a mechanism to select which rotating registers should be rotated or not
every time a br.ctop instruction is called. Thus, when executing an inner loop, one could
rotate the registers of that level while freezing the registers used by the operations from
stages that do not belong to that level.
However the Itanium architecture only offers a single level of rotating registers,
which we have assigned to the outermost loop. Therefore it becomes necessary to emulate
register rotation in the other loop levels to prevent any interference between any two life-
times. Note that general-purpose and floating-point registers can rotate, but also predicate
registers.
Our solution consists of using code duplication and register index offsetting. With
predication and register rotation, a single copy of the kernel is necessary to execute any
part of the schedule. Predication is then used to disable unnecessary stages and register
rotation allow stages being executed in parallel to use distinct register sets and therefore
prevents any interference between lifetimes. Without predication and register rotation,
register index offsetting is used to undo the register assignment (which assumed register
rotation). Then multiple different copies of the kernel are necessary and code duplica-
tion is used. The technique, named Modulo-Variable Expansion was first introduced by
Rau [RLTS92] and is here adapted for SSP.
Figure 8.8 shows an example of a modulo-scheduled single loop to illustrate the
discussion. The register-allocated kernel of the loop is shown in Figure 8.8(a). The two
other figures are final schedules for the loop. In Figure 8.8(b), the architecture offers
predication and register rotation. The final schedule is then composed of successive copies
of the kernel. r25, defined in the first stage is used in the next iteration by the second stage
as r26, after register rotation. In Figure 8.8(c), code duplication is used instead of register
rotation. This time the value in r25 is still in r25 in the second iteration. We must rename
that register. To avoid any register conflict is in turn renamed r26. The renaming process
is a chain reaction. Eventually the final schedule is composed of copies of 2 kernels: the
180

r25r26
(a) Kernel
... ...
... ...
r25r26
r25
r25
r25
r26
r26
r26r25 becomes r26register rotation:
kernel
(b) With Hardware Support
... ...
... ...
r25r26
r25r26
r25r26
r26r25
multiple copiesof the kernel
register indexoffset
(c) Without Hardware Support
Figure 8.8: Register Rotation Emulation Example
original kernel and the original kernel whose register indexes have been adjusted.
For SSP the technique is similar and applied to the ILP and DFP. However we still
use the predicate registers, which indexes are also adjusted. It is necessary to handle the
case where the number of iterations of the inner loops is not a multiple of the number of
necessary kernel copies. Then some stages must be disable in order not to executed more
iterations than necessary.
8.3.7 Innermost Level Separation Constraint
The innermost level separation constraint allows operations from different levels
to appear in the same stage with the exception of the innermost stages where only inner-
most operations may appear. When emitting the code of a given stage, one must consider
the level of the stage.
For instance, in a triple loop nest, two operations op2 and op3 from the outermost
and middle loops, respectively, could be scheduled in the same stage s as shown in Fig-
ure 8.9. When stage s is emitted in the OLP, it should include both operations. However
when the same stage appears in DFP2, op2 should be ignored and not emitted.
Hence the level parameter to the functions stages() and emit ops(). When emit-
ting the operations of a given stage, only the operations from the current level and deeper
181

for I = 1, N1 doop1
op2
for J = 1, N2 doop3
for K = 1, N3 doop4
op5
op6
end forend for
end for
(a) Source
op1op2op3
op4op5op6
op2 and op3 are fromdifferent loop levels
(b) Kernel
in the OLPappearsop2 only
ILES op6
op6op4op5
op3op4op5 op3
OLP
op6op4op5
op2op3
op1
op6op4op5
op2op3
op1
op4op6
op4op5
op5 op6
op4op6
op4op5
op5 op6
op6op4op5
op2op3
op1
op6op4op5
op2op3
op1
(c) Final Schedule
Figure 8.9: Conditional Emission for the Innermost Level Separation Constraint
182

are emitted. The others are simply ignored.
8.4 Example
In this section, we apply the code generation technique presented earlier to a con-
crete example. Let us consider the register-allocated kernel presented in Figure 8.10
where the latency of load and store operations is assumed to be 1 cycle. The kernel
corresponds to a double loop nest and contains 2 innermost and 2 outermost stages. The
operations are displayed in Itanium assembly code.
(p19) st4 [r48]=r43,4 (p18) ld4 r42=[r37],4 (p17) add r45=4*N2,r46 (p16) add r34=4*N2,r35
abcd
Figure 8.10: Example Register-Allocated Kernel
We consider the case where the number of outermost iterations is N1 = 5 and
the number of innermost iterations is N2 = 3. The generated assembly code for the fi-
nal schedule is shown in Figure 8.11. The solution minimizing loop overhead instructions
was used. For clarity purposes, some parts were left in pseudo-code, such as the initializa-
tion of the loop counters, the number of iterations or the ILP loop overhead instructions.
For more information about Itanium assembly code, the reader is referred to Section 2.2
or to [Int01].
The execution of the assembly code is shown in Figure 8.12. The different patterns
and calls to br.ctop are highlighted. On the right-hand side of the figure, the values of the
dedicated loop counters LC and EC, and of the predicate registers are shown. A gray
background indicates a manual initialization, while a white background indicates a change
caused by the br.ctop instruction. The values are only shown when a change occurs.
The first step is to initialize the loop counters and predicate registers. The clrrrb
clears the rotating register base. In other words, all the hardware support for register
rotation is reset for the execution of the upcoming loop nest. Then LC and EC are
initialized according to the formulas presented earlier. Note that N1 is not a multiple of
183

clrrrb ;;LC = N1 − 1 = 4 [Init]EC = ln − (N1 − 1)%Sn = 3mov pr.rot=1<<16 ;;
Prolog0:(p16) add r34=4*N2,r35 ;; [Prolog]
br.ctop endprolog0 ;;endProlog0:
OLP0:(p19) st4 [r48]=r43,4(p18) ld4 r42=[r37],4(p17) add r45=4*N2,r46(p16) add r34=4*N2,r35 ;;
br.ctop endOLP0 ;;endOLP0: [OLP]OLP1:
(p19) st4 [r48]=r43,4(p18) ld4 r42=[r37],4(p17) add r45=4*N2,r46(p16) add r34=4*N2,r35 ;;
endOLP1:
ILP:for I2 = 2, N2 do
(p18) st4 [r47]=r42,4(p17) ld4 r41=[r36],4 ;; [ILP](p17) st4 [r46]=r41,4(p18) ld4 r42=[r37],4 ;;
endforendILP:
br.ctop OLP0;;
LC=0EC = l1 − fn + 1 = 2 ;;
Epilog0:(p19) st4 [r48]=r43,4(p18) ld4 r42=[r37],4 ;;
br.ctop endepilog0 ;; [Epilog]endEpilog0:Epilog1:
(p19) st4 [r48]=r43,4 ;;br.ctop endepilog1 ;;
endEpilog1:
Figure 8.11: Example Assembly Code
184
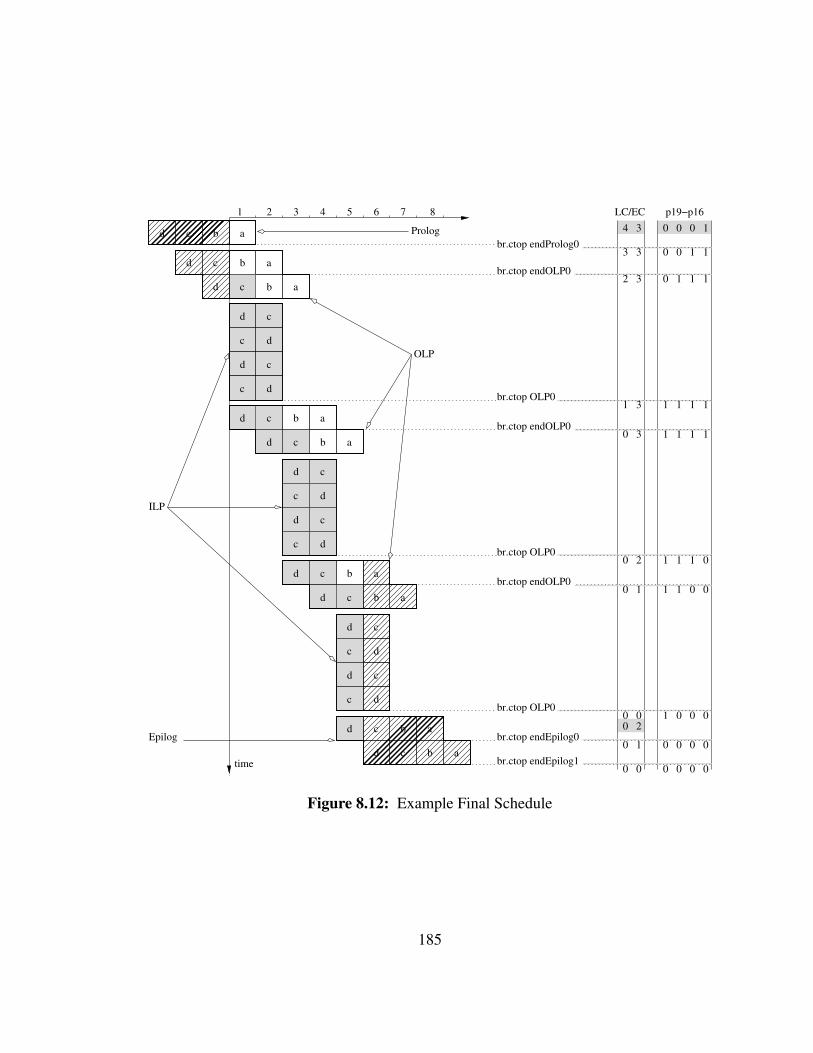
d b ac
d b ac
d b ac
d c ab
d c ab
d c
d
a
b a
b
c
d c a
b a
b
d c
d c
dc
d c
dc
d c
dc
d c
dc
d c
dc
d c
dc
ILP
Epilog
Prolog
OLP
7654321 8
time
br.ctop endOLP0
br.ctop endEpilog0
br.ctop endEpilog1
br.ctop OLP0
br.ctop endOLP0
br.ctop OLP0
br.ctop endOLP0
br.ctop OLP0
p19−p164 3
3 3
2 3
20
000
0
0 0
2
1
0 0
0
1
1 1 1
1
0111
0001
0 0 0 0
0000
0 0 0 1LC/EC
1 3 1 1 1 1
111130
0 1 1 1 0 0
br.ctop endProlog0
Figure 8.12: Example Final Schedule
185
Sn, and that EC will be used to turn off the stages that ought to execute the 6th iteration.
The predicate registers are all set to 0, except for p16, which is set to 1.
Then the prolog is executed. In this example, only one copy of the kernel is
necessary. Because we can guarantee that only stage a will be executed, we do not emit
the other stages. The emission of those stages would have also been correct, because
the values of the predicate registers guarantee that stages b to d will not be executed.
However, when possible, one must avoid emitting operations that are guaranteed to never
execute in order to limit code bloating. After the execution of the prolog, the rotating
registers are rotated and LC is decremented. p17 is now equal to 1.
The OLP is then executed. First stages a and b only are considered because of
predication. Then the registers are rotated and p18 = 1 and stages a to c are executed.
The last copy of the kernel is not followed by register rotation and the values of the loop
counters and predicate registers are left as such for the execution of the ILP.
The ILP is composed of Sn = 2 copies of the innermost stages of the kernel. The
index of the rotating registers have been reindexed to compensate for the lack of register
rotation at that level. A stop bit, represented by two semi-columns, is placed between
each copy of the kernel. Once the ILP has been executed, the registers are rotated and the
loop counters decremented. The code then jumps back to the OLP again. This time all
the predicate registers are set to 1.
For the execution of the last iteration group (iterations 5 and 6), things differ.
Indeed LC is now equal to 0. Therefore, when register rotation occurs, p16 is set to 0 and
some stages will be disabled. Thus the last execution of the OLP has stage a and then
stages a and b disabled. The same is true for the ILP. At the end of the execution of the
ILP, EC becomes null and the execution falls through.
EC is then reset to 2 and the epilog is executed. Because N1 is not a multiple of
Sn, not all the emitted stages are executed. Here stage d is executed once. Otherwise,
stages c and d, then stage d would have been executed. Note that when the value of N1
186
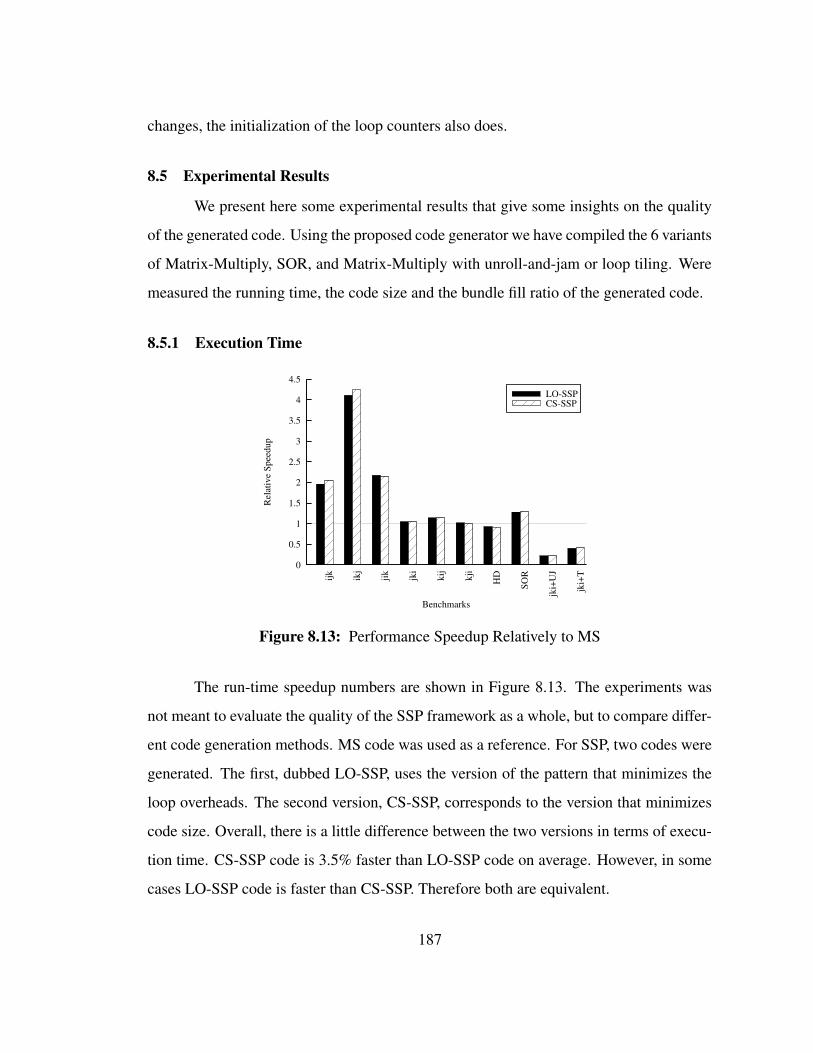
changes, the initialization of the loop counters also does.
8.5 Experimental Results
We present here some experimental results that give some insights on the quality
of the generated code. Using the proposed code generator we have compiled the 6 variants
of Matrix-Multiply, SOR, and Matrix-Multiply with unroll-and-jam or loop tiling. Were
measured the running time, the code size and the bundle fill ratio of the generated code.
8.5.1 Execution Time
0
0.5
1
1.5
2
2.5
3
3.5
4
4.5
jki+
T
jki+
UJ
SOR
HDkji
kij
jki
jikikj
ijk
Rel
ativ
e Sp
eedu
p
Benchmarks
LO-SSPCS-SSP
Figure 8.13: Performance Speedup Relatively to MS
The run-time speedup numbers are shown in Figure 8.13. The experiments was
not meant to evaluate the quality of the SSP framework as a whole, but to compare differ-
ent code generation methods. MS code was used as a reference. For SSP, two codes were
generated. The first, dubbed LO-SSP, uses the version of the pattern that minimizes the
loop overheads. The second version, CS-SSP, corresponds to the version that minimizes
code size. Overall, there is a little difference between the two versions in terms of execu-
tion time. CS-SSP code is 3.5% faster than LO-SSP code on average. However, in some
cases LO-SSP code is faster than CS-SSP. Therefore both are equivalent.
187

8.5.2 Code Size
However, when it comes to code size, both code generation differ. The CS-SSP
is on average 1.67 times smaller than the LO-SSP code. Therefore limiting code size
explosion can efficiently be done at no cost in terms of run-time performance.
0
2
4
6
8
10
jki+
T
jki+
UJ
SOR
HDkji
kij
jki
jikikj
ijk
Rel
ativ
e C
ode
Size
Incr
ease
Benchmarks
LO-SSPCS-SSP
Figure 8.14: Code Size Increase Relatively to MS
On the other hand, when compared to MS, the code size is much higher (3.5 times
larger on average for CS-SSP). Several reasons explained those numbers. First, because
more than one loop level is considered, the SSP kernel is larger than the MS kernel.
Second, the lack of multiple levels of register rotation, forced us to duplicate code, which
represents 60% of the code or more. With proper hardware support, that duplication
would have been unnecessary.
Moreover the code size results must be considered with caution. Despite the no-
ticeable code size increase, the entire code of the schedule fits into the L1 instruction
cache of the processor. Run-time performance results in this chapter and in Chapter 3
have shown that SSP is still more efficient than MS to schedule loop nests. As long as no
performance degradation is noticed, the code size increase is not an issue.
188

8.5.3 Bundle Density
Finally we compare the bundle density for our three methods. On Itanium, a bun-
dle is contains one to three instructions that can be run in parallel. Measuring the average
number of operations within a bundle is an indirect way of measuring the instruction-level
parallelism exploited in the code. A higher values means a higher instruction-level par-
allelism degree. Overall CS-SSP code performs the best. On average a bundle contains
1.93, 1.93, and 2.11 instructions for MS, LO-SSP and CS-SSP respectively. Therefore
CS-SSP makes a better use of the available processor resources.
1
1.5
2
2.5
3
jki+
T
jki+
UJ
SOR
HDkji
kij
jki
jikikj
ijk
Bun
dle
Den
sity
(min
=1, m
ax=3
)
Benchmarks
MSLO-SSPCS-SSP
Figure 8.15: Bundle Density
Overall the code-size conscious code generation method drastically reduces the
code size and produces denser code while maintaining the same level of run-time perfor-
mance as the code generation that minimizes loop control overheads. CS-SSP is therefore
the method of choice to generate SSP code. The code size increase, although noticeable,
does not impair the schedule and the entire loop nest still fits in the L1 instruction cache.
8.6 Related Work
Code generation schemes for modulo scheduling of single loops are discussed
for VLIW architectures with and without hardware support in [RST92]. The considered
189
hardware support include rotating registers, predicated execution, and iteration control
registers [DT93]. The code generation approach for modulo scheduling in the Cydra-5
compiler has been discussed in [DT93]. Register allocation for software pipelined loops
has been considered in [RLTS92]. A number of alternative solutions have been presented
for machines with and without hardware support for software pipelining. Code size re-
duction for software pipelined loops has been discussed in [LF02, GSS+01]. All these
works consider software pipelining only for the innermost loop.
In contract, the solution presented in this chapter targets code generation issues for
the SSP method, which deals with multi-dimensional loop nests. Specific issues solved
include lack of multiple rotating register files, multiple patterns, loop overheads associ-
ated with the multiple loop levels, code size reduction, loop counter initialization.
8.7 Conclusion
This chapter presented a code generation scheme taking as an input a register-
allocated kernel that assumed multiple levels of register rotation. The proposed tech-
niques makes use of available hardware support such as predication, register rotation and
dedicated loop counters and make up for it through code duplication and register index
offsetting when that support is not available. Through the execution of repeating patterns
(OLP, DFP, ILP), the code remains compact and still fits in the L1 of the target architec-
ture.
Two methods were proposed. The first minimizes loop control overheads whereas
the second minimizes code size. Experimental results have shown that the latter is to
be preferred as it generates smaller and denser code while preserving the same level of
performance as the first method. Both methods tackle all the issues mentioned such as
loop counter initialization, unfriendly number of iterations, lifetimes interferences and the
innermost level separation constraint.
190

Chapter 9
MULTI-THREADED SSP
9.1 Introduction
The previous chapters described the different steps of the SSP framework up to
the code generation method for VLIW architectures with dedicated hardware loop sup-
port. In this chapter, we present how to software pipeline loop nests on multi-threaded
cellular architectures using Multi-Threaded Single-dimension Software-Pipelining (MT-
SSP). Starting from the ideal schedule, the multi-threaded final schedule is generated.
It is deadlock-free and fully synchronized. The proposed solution makes use of all the
thread units available in the cellular architecture without any modification to the source
code. The code generation algorithms are also presented. They take for input the same
SSP kernel than the code generation algorithms used for uniprocessor architectures in
Chapter 8.
The algorithms were implemented in the Open64 compiler retargeted to the IBM
64-bit Cyclops architecture and the multi-threaded final schedules run on the Cyclops
development team simulator. Experimental results show that the multi-threaded scales up
well when the number of thread units increases and that the number of stall cycles from
synchronization instructions is extremely low. Moreover, the average register pressure is
reasonable.
The chapter is organized as follows. The next section presents the Multi-Threaded
SSP theory along with the corresponding schedule function. Section 9.4 proposes an im-
plementation mechanism for the IBM 64-bit Cyclops architecture with an efficient syn-
chronization solution. Experimental results and related work are presented in Section 9.5
191

and Section 9.6, respectively. Concluding remarks are given in the last section.
9.2 Problem Description
9.2.1 Problem Statement
In this chapter, we apply the Single-dimension Software Pipelining technique to
multi-threaded cellular architectures. We assume that the SSP ideal schedule has already
been computed and that registers have been allocated to the loop variants. A multi-
threaded version of the final schedule must now be computed. Therefore, the problem
we address here can be formulated as follows. Given a register-allocated SSP kernel,
generate a multi-threaded final schedule for multi-threaded cellular architectures.
Naturally, the multi-threaded final schedule will differ from the uniprocessor final
schedule presented in Chapter 3 and must first be defined. Section 9.3 presents the final
schedule for cellular architectures and the associated schedule function.
Despite the differences in the final schedule, the previous SSP steps, loop selec-
tion, kernel generation and register allocation, do not require any modification. Some
changes will be applied to the operations in the kernel, but the methods presented so far
are unchanged.
9.2.2 Issues
Multiple challenges must be faced to produce a multi-threaded final schedule.
First, the dependence and resource constraints must be respected. Similarly to the unipro-
cessor case, an operation cannot be scheduled before all the operations on which it de-
pends are committed. However, with multi-threaded architectures, extra attention must be
paid to memory operations. Memory dependences may exist between independent thread
units and synchronization is required to guarantee a sequential order between the memory
accesses to the same memory location.
The second challenge is the synchronization mechanism to be used. How to make
sure that a thread unit does not run ahead of the others? How to implement a light-weight
192
synchronization scheme? How to parameterize the synchronization mechanism so that the
execution time of the multi-threaded final schedule is minimized? If the synchronization
occurs too often, no useful work is done. If synchronization occurs too rarely, thread units
are idle waiting and no work is done.
The third issues concerns the workload distribution. Multi-threaded cellular archi-
tectures offer a large number of thread units. Dispatching tasks to thread units is costly.
Moreover, the distribution must be fair to keep all thread units as busy as possible in order
to minimize the overall execution time of the multi-threaded final schedule.
Fourth, cross-iteration dependences between outermost iterations scheduled on
separate thread units require thread units to communicate with each other. If the de-
pendence is a memory dependence, then synchronization must be used to guarantee that
memory locations contain the expected values. If the dependence is a register depen-
dence, extra code must be added and scheduled to communicate the register values from
one thread unit to the next. A register dependence occurs in the ideal schedule when an
operation in an outermost iteration accesses a value wrote into a register by another out-
ermost iteration. As long as the two outermost iterations are executed on the same thread
unit, the register is available to both. If the two iterations are scheduled on different thread
units, then the register of the first thread unit cannot be read the second thread unit.
Finally, as for every applications requiring synchronization, the multi-threaded
final schedule must be guaranteed deadlock-free.
9.3 Multi-Threaded SSP Theory
9.3.1 Multi-Threaded Final Schedule
The multi-threaded schedule is computed from the ideal schedule presented in
Section 3.2. In the ideal schedule, there may be some resource conflicts between out-
ermost iterations. To cope with the issue, the uniprocessor SSP schedule introduces a
delay every Sn outermost iterations. In the multi-threaded schedule, every group of Sn
iterations is instead executed on a separate thread unit. Sn, the number of stages of the
193

smallest subkernel, is the maximum number of outermost iterations that can be grouped
in the same iteration group without any resource conflict. With Sn+1 and above iterations,
two instances of the same innermost stage would be executed in parallel. The scheduling
constraints of the kernel does not guarantee that there will not be any resource conflict in
that scenario.
All the thread units end up executing the same code in a Single-Program Multiple-
Data (SPMD) fashion, simplifying the workload distribution and allowing thread units to
share the instruction cache.
op1
op2op3
op4op2op3
op4
op4
op2op3
op1
op2op3
op4op2op3
op4
op4
op2op3
op1
op2op3
op4op2op3
op4
op4
op2op3
op1
op2op3
op4op2op3
op4
op4
op2op3
0 1 2 3 i1
resource conflictsT=2
cycles
(a) Ideal Schedule
op1
op2op3
op4op2op3
op4
op4
op2op3
op1
op2op3
op4op2op3
op4
op4
op2op3
op1
op2op3
op4op2op3
op4
op4
op2op3
op1
op2op3
op4op2op3
op4
op4
op2op3
TU 0 TU 1
delay >= Tsynchronization
0 1 2 3 i1
iteration group (Sn=2)
extra waitinstruction
signalinstruction
instructionwait
extra signalinstruction
waiting
(b) Final Multi-Threaded Schedule
Figure 9.1: Multi-Threaded SSP Schedule Example
194
Naturally, the thread units require to be synchronized. Synchronization instruc-
tions are added to ensure that a thread unit does run ahead of its predecessor. In this
section, we assume the ideal case where those synchronization instructions can be ex-
ecuted at no cost. We also assume that the synchronization is non-blocking from the
sender’s point of view. The corresponding final schedule is then shown in Figure 9.1.
Although the figure suggests that synchronization signals are sent at regular interval, it
is not the case. Earlier wait instructions and other run-time variables prevent any regular
synchronization pattern to appear. The reader will notice that the first thread unit does not
have to wait for any synchronization signal to run. The position of the synchronization
points will be determined by code emission considerations as explained in Section 9.4.
In addition of the synchronization points mentioned above, a synchronization de-
lay must be introduced to guarantee the correctness of the final multi-threaded schedule.
Indeed, in the ideal schedule, a load instruction may access a value in memory that had
been stored in the same instance of the kernel. On a uniprocessor, such a memory depen-
dence would have been handled by the kernel generator. In the multi-threaded schedule,
the store instruction might appear in one iteration group and the load instruction in the
next. The memory would only be guaranteed to contain the correct value after the next
synchronization. Therefore, each iteration group must be delayed until the next synchro-
nization to ensure that the memory contains all the correct values. The duration of that
delay depends on the computed kernel. It is greater or equal to the initiation interval of
the kernel, T . Because an extra wait instruction is inserted before executing the itera-
tion group on the receiving thread unit, an extra signal instruction must be added after
the execution of the iteration group of the send thread unit so that the number of signal
instructions is equal to the number of wait instructions.
An example to explain the synchronization delay is shown in Figure 9.2. Let us
assume that op4 is a store instruction to a memory location which will be accessed by op3
two outermost iterations later. There is a memory dependence from op4 to op3. When
195

op2op3op4
op2
op1
op1
op2op3
load
store
sync
dependence
(a) No Stall
op1
op1
op2op3op3op4
op2
op2
at the same timeload and store executed
stall
sync
(b) A Memory Contention Occurs
Figure 9.2: Without Synchronization Delay Example
generating the kernel, the dependence was taken into account. If both iteration groups
were executed on the same processor, there would be no issue. Since the two iteration
groups are executed on separate thread units, the synchronization delay is required. If,
for instance, op2 is delayed because of memory access or floating-point unit contention in
the first iteration group and stalls the execution of the first thread unit, the second thread
unit will not be affected and continue running until op3 is executed and fetches the wrong
value from memory. If an extra wait instruction is added before executing the second
iteration group, a synchronization signal will be sent after op2 is executed, and op3 will
read the correct value from memory, as shown in Figure 9.3.
The reader would have noticed that synchronization signals are sent only from one
thread unit to its direct successor. Indeed, as explained in Section 3.2.2, there cannot be
any dependence from one outermost iteration to one of its predecessor. Those depen-
dences would require thread units to also synchronize their predecessors. Dependences
can only exist from one outermost iteration to either itself or one of the next outermost
196
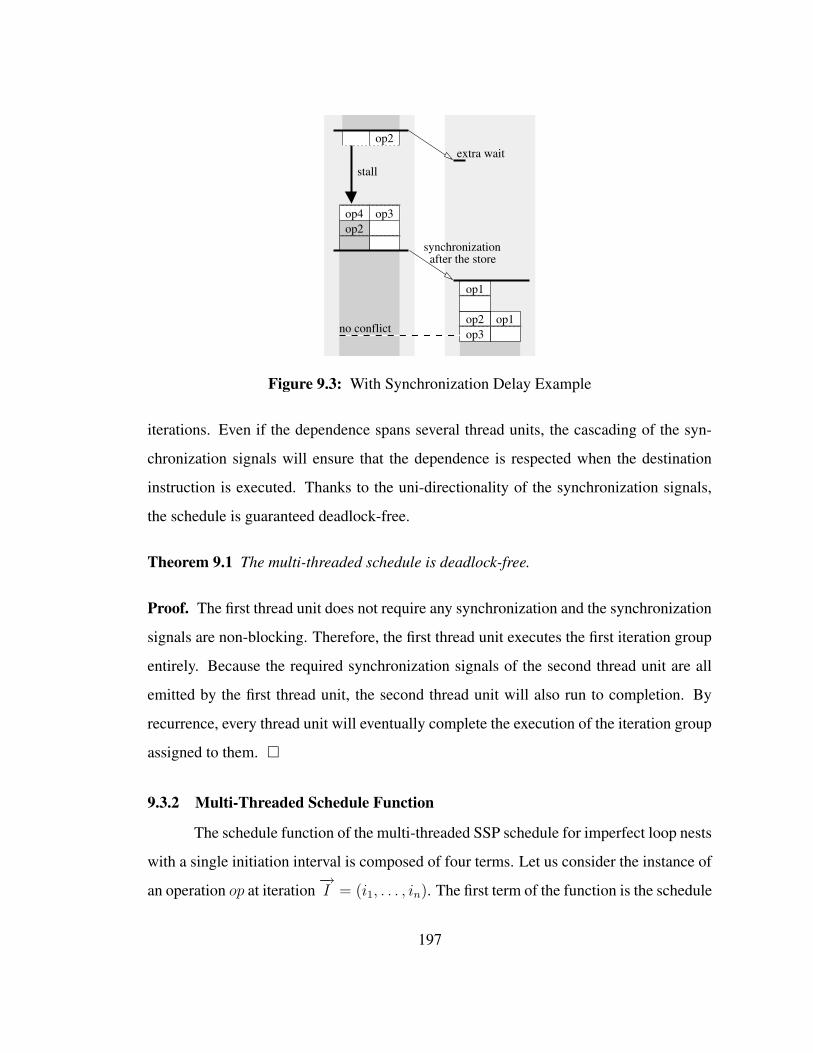
op3op4op2
op1
op1
op2op3
op2extra wait
no conflict
after the storesynchronization
stall
Figure 9.3: With Synchronization Delay Example
iterations. Even if the dependence spans several thread units, the cascading of the syn-
chronization signals will ensure that the dependence is respected when the destination
instruction is executed. Thanks to the uni-directionality of the synchronization signals,
the schedule is guaranteed deadlock-free.
Theorem 9.1 The multi-threaded schedule is deadlock-free.
Proof. The first thread unit does not require any synchronization and the synchronization
signals are non-blocking. Therefore, the first thread unit executes the first iteration group
entirely. Because the required synchronization signals of the second thread unit are all
emitted by the first thread unit, the second thread unit will also run to completion. By
recurrence, every thread unit will eventually complete the execution of the iteration group
assigned to them. �
9.3.2 Multi-Threaded Schedule Function
The schedule function of the multi-threaded SSP schedule for imperfect loop nests
with a single initiation interval is composed of four terms. Let us consider the instance of
an operation op at iteration−→I = (i1, . . . , in). The first term of the function is the schedule
197

cycle of the operation in the 1-D schedule, σ(op, 0). The second term is the start cycle of
the outermost iteration and is equal to:
i1 ∗ T (9.1)
The third term corresponds to the execution time of the inner iterations within the
current outermost iteration and is defined as:
k=n∑
k=2
ik ∗ timeLk (9.2)
where timeLk is the execution time of one iteration of the loop Lk within one
outermost iteration in the ideal schedule where operations have not been delayed yet:
timeLk =i=n∑
i=k
((Si − Si+1) ∗ T ∗
j=i∏
j=k+1
Nj
)
Sn+1 = 0
The last term is the synchronization delay explained in Section 9.3.1. Each thread
unit executes a single group of Sn outermost iterations. Each thread unit is delayed by a
minimum of T cycles from the previous thread unit. Therefore the synchronization delay
is expressed as:⌊i1Sn
⌋∗ T (9.3)
The schedule function of the multi-threaded SSP schedule for imperfect loop nests
with a single initiation interval can be written as shown in Figure 9.4. It assumes the ideal
case where synchronization takes 0 cycle and the synchronization delay only T cycles.
Theorem 9.2 Given an imperfect loop nest and an SSP kernel with a single initiation
interval for it, the schedule function proposed in Equation 9.4 respects both the depen-
dencies from the n-D DDG and the resource constraints.
198

f(op,−→I ) = σ(op, 0) + i1 ∗ T +
k=n∑
k=2
ik ∗ timeLk +
⌊i1Sn
⌋∗ T (9.4)
Figure 9.4: Multi-Threaded Schedule Function for Imperfect Loop Nests with SingleInitiation Interval
Proof. To prove the theorem we must show that both zero and positive dependences from
the n-D DDG and the resource constraints are enforced.
Given a multi-dimensional dependence from operation op1 to operation op2 with
a latency δ and a dependence vector−→d = (d1, ..., dn), the dependence is respected if, at
any iteration vector−→I = (i1, ..., in), we have:
f(op2,−→I +−→d )− f(op1,
−→I ) ≥ δ (9.5)
However, f(op2,−→I +−→d )− f(op1,
−→I ) can be rewritten:
f(op2,−→I +−→d )− f(op1,
−→I ) = σ(op2, 0)− σ(op1, 0) + d1 ∗ T (9.6)
+k=n∑
k=2
dk ∗ timeLk (9.7)
+
(⌊i1 + d1
Sn
⌋−⌊i1Sn
⌋)∗ T (9.8)
Because the 1-D schedule respects the dependence constraint (Equation 3.5), term 9.6
is greater or equal to δ. Since d1 cannot be negative, term 9.8 is positive. If the de-
pendence is a zero dependence, then (d2, ..., dn) = (0, ..., 0) and term 9.7 is equal to 0.
If the dependence is a positive dependence, using Equation 3.39, term 9.7 is positive.
Thereforef(op2,−→I +−→d )− f(op1,
−→I ) is greater or equal to δ and both zero and positive
dependences are respected.
A thread unit executes a single group of Sn consecutive outermost iterations.
Therefore, Sn distinct stages of the kernel are executed simultaneously at any time by
a thread unit. Since the kernel is made of S ≥ Sn stages and respects the resource
199
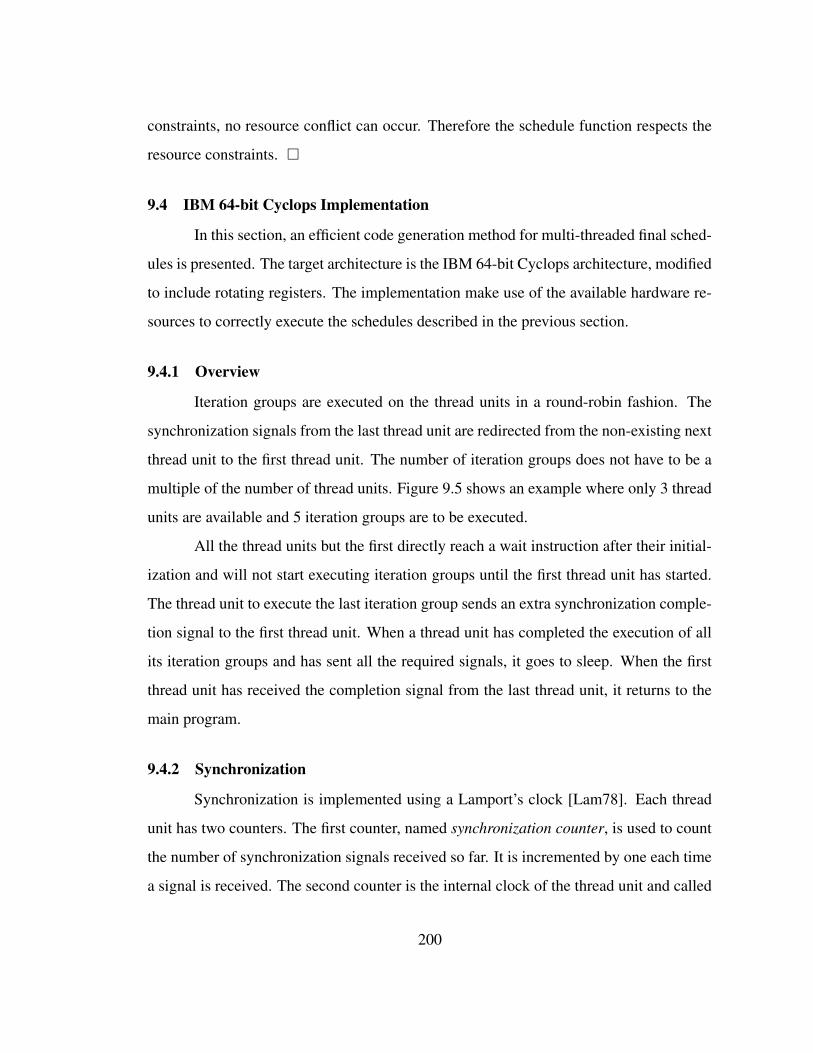
constraints, no resource conflict can occur. Therefore the schedule function respects the
resource constraints. �
9.4 IBM 64-bit Cyclops Implementation
In this section, an efficient code generation method for multi-threaded final sched-
ules is presented. The target architecture is the IBM 64-bit Cyclops architecture, modified
to include rotating registers. The implementation make use of the available hardware re-
sources to correctly execute the schedules described in the previous section.
9.4.1 Overview
Iteration groups are executed on the thread units in a round-robin fashion. The
synchronization signals from the last thread unit are redirected from the non-existing next
thread unit to the first thread unit. The number of iteration groups does not have to be a
multiple of the number of thread units. Figure 9.5 shows an example where only 3 thread
units are available and 5 iteration groups are to be executed.
All the thread units but the first directly reach a wait instruction after their initial-
ization and will not start executing iteration groups until the first thread unit has started.
The thread unit to execute the last iteration group sends an extra synchronization comple-
tion signal to the first thread unit. When a thread unit has completed the execution of all
its iteration groups and has sent all the required signals, it goes to sleep. When the first
thread unit has received the completion signal from the last thread unit, it returns to the
main program.
9.4.2 Synchronization
Synchronization is implemented using a Lamport’s clock [Lam78]. Each thread
unit has two counters. The first counter, named synchronization counter, is used to count
the number of synchronization signals received so far. It is incremented by one each time
a signal is received. The second counter is the internal clock of the thread unit and called
200

init init
sleep
init
return
sleep
op1
op2op3
op4op2op3
op4
op4
op2op3
op1
op2op3
op4op2op3
op4
op4
op2op3
op1
op2op3
op4op2op3
op4
op4
op2op3
op1
op2op3
op4op2op3
op4
op4
op2op3
op1
op2op3
op4op2op3
op4
op4
op2op3
op1
op2op3
op4op2op3
op4
op4
op2op3
op1
op2op3
op4op2op3
op4
op4
op2op3
op1
op2op3
op4op2op3
op4
op4
op2op3
op1
op2op3
op4op2op3
op4
op4
op2op3
op1
op2op3
op4op2op3
op4
op4
op2op3
TU 0 TU 1 TU 2
extra waitinstruction
(1)
(1)
extra signalinstruction
completionwait
(2)
(2)
completionsignal
Figure 9.5: The Multi-Threaded Final Schedule on an IBM 64-bit Cyclops chip
201
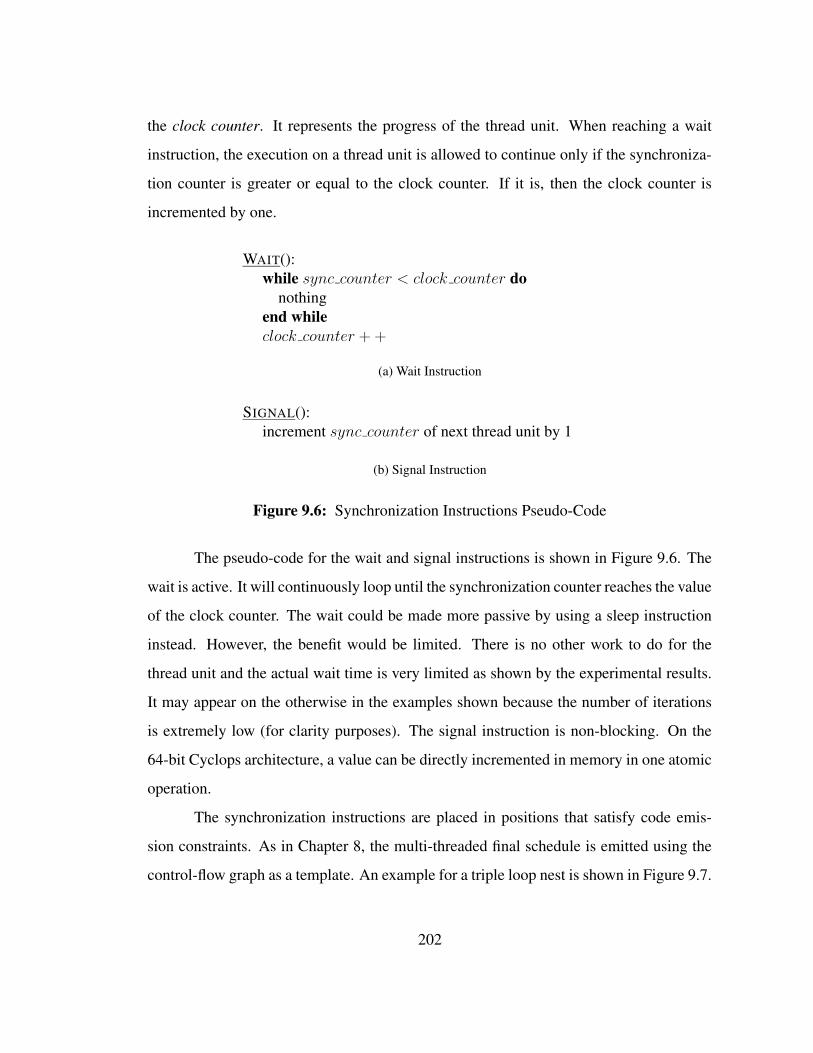
the clock counter. It represents the progress of the thread unit. When reaching a wait
instruction, the execution on a thread unit is allowed to continue only if the synchroniza-
tion counter is greater or equal to the clock counter. If it is, then the clock counter is
incremented by one.
WAIT():while sync counter < clock counter do
nothingend whileclock counter + +
(a) Wait Instruction
SIGNAL():increment sync counter of next thread unit by 1
(b) Signal Instruction
Figure 9.6: Synchronization Instructions Pseudo-Code
The pseudo-code for the wait and signal instructions is shown in Figure 9.6. The
wait is active. It will continuously loop until the synchronization counter reaches the value
of the clock counter. The wait could be made more passive by using a sleep instruction
instead. However, the benefit would be limited. There is no other work to do for the
thread unit and the actual wait time is very limited as shown by the experimental results.
It may appear on the otherwise in the examples shown because the number of iterations
is extremely low (for clarity purposes). The signal instruction is non-blocking. On the
64-bit Cyclops architecture, a value can be directly incremented in memory in one atomic
operation.
The synchronization instructions are placed in positions that satisfy code emis-
sion constraints. As in Chapter 8, the multi-threaded final schedule is emitted using the
control-flow graph as a template. An example for a triple loop nest is shown in Figure 9.7.
202

Innermost LoopPattern
Prolog
Draining/FillingPattern
Epilog
previous iteration group
next iteration group
N
N
−1n
−1i
Figure 9.7: Multi-Threaded SSP Schedule Control-Flow Graph for a Triple Loop Nest
When the schedule is partitioned into loop patterns named prolog, DFP, ILP, and epilog).
A wait instruction is added before each pattern and a signal instruction after.
In order to minimize the execution time of the wait instruction, the synchronization
counter is placed in the scratch-pad memory of the thread unit being signaled. The value
can then be quickly read by the receiving thread unit without using the crossbar network.
Although the signal instruction travels over the crossbar network, the signal instruction
is non-blocking. Therefore, the sending thread unit does not pay the cost of accessing
the scratch-pad memory of the receiving thread unit. The clock counter, which cannot be
accessed by the other thread units, is placed in a dedicated register of the thread unit for
fast access.
9.4.3 Innermost Loop Tiling
To reduce the number of synchronization stalls on a thread unit, the execution of
the Nn − 1 instances of the innermost loop pattern is tiled into tiles of G iterations. If G
203

ThreadUnit
Scratch−PadMemory
ThreadUnit
Scratch−PadMemory
Crossbar
Network
C S C S
remote non−blocking signal
local wait
synchronization counterclock counter
Figure 9.8: Location of the Synchronization Counters
is not a multiple of Nn − 1, the last tile only contains the remaining instances. Instead of
issuing a wait and signal instruction at the entrance and exit, respectively, of each instance
of the pattern, the synchronizations are issued every G instances as shown in Figure 9.9.
The technique allows for the parameterization of the synchronization tiling.
Let w designates the average execution time of the wait instruction. We can now
give an estimate of the total execution time of the schedule using the definition of the
multi-threaded schedule function for the IBM 64-bit Cyclops architecture. The last term
of Equation 9.4 is now better expressed by:(⌊
i1Sn
⌋− 1
)∗ (ln ∗ T +G ∗ Sn ∗ T ) (9.9)
ln∗T is the number of cycles executed by a thread before sending the first signal. G∗Sn∗Tis the number of cycles between the first signal and the second signal sent to the next
thread unit. The ILP is Sn ∗ T cycles long and a signal is sent after G executions of the
ILP.
Unlike the theoretical multi-threaded schedule function in Equation 9.4, we also
take into account the synchronization stalls of the entire schedule. That cost is carried to
204

op4op2op3
op2op3
op4
op4op2op3
op2op3
op4
op4op2op3
op2op3
op4
op4op2op3
op2op3
op4
ILP instance
(a) Before Tiling
op4op2op3
op2op3
op4
op4op2op3
op2op3
op4
op4op2op3
op2op3
op4
op4op2op3
op2op3
op4
tiled ILP
(b) After Tiling
Figure 9.9: Synchronization Tiling Example (G=2)
the last iteration group where it adds up to:⌊N1
Sn
⌋∗ 2 ∗ w + (syncsPerGroup− 2) ∗ w (9.10)
The first term corresponds to the 2 wait instructions used for the synchronization delay.
The delay accumulates over the iteration groups executed earlier. The second term corre-
sponds to the remaining wait instructions within one outermost iteration group.
Then, the total execution time of the schedule for the IBM 64-bit Cyclops archi-
tecture can be approximated by:
ftotal(G) = constant+
(⌊N1
Sn
⌋− 1
)∗ Sn ∗ T ∗G+ syncsPerGroup ∗ w
= constant+
(⌊N1
Sn
⌋− 1
)∗ Sn ∗ T ∗G
+w ∗ (Nn − 1) ∗(
1 +
j=n−1∏
j=2
(Nj − 1)
)∗ 1
G
205

Using the first derivative of the function, the best loop tiling factor for which the total
execution time is minimized, Gbest, can be computed and is equal to:
Gbest =
√√√√√w ∗ (Nn − 1) ∗
(1 +
∏j=n−1j=2 (Nj − 1)
)
T ∗ Sn ∗(⌊
N1
Sn
⌋− 1) (9.11)
The best empiric value for G is studied in Section 9.5.
9.4.4 Synchronization Bootstrapping
The first iteration group, executed on the first thread unit, does not receive any
synchronization signal during its execution. Therefore, the flow of execution should fall
through the wait instructions of that iteration group. Such feature is achieved by setting
the synchronization counter to the number of synchronization signals that an iteration
group needs to receive to run to completion, defined as syncsPerGroup. That number is
equal to the number of instances of each pattern to which we add the extra wait instruction
used for the synchronization delay (extra = 1). In one iteration group, the prolog is
executed only once (P = 1). So is the epilog (E = 1). The number of times DFPi is
executed, noted Di with i ∈ [2, n− 1], is given by:
Di = (Ni − 1) ∗Di−1 with D1 = P =
j=i∏
j=2
(Nj − 1)
The number of times the tiled ILP is executed, noted I , can be expressed as:
I =Nn − 1
G∗ (Dn−1 + P ) =
Nn − 1
G∗(
1 +
j=n−1∏
j=2
(Nj − 1)
)
206

Then we have:
syncsPerGroup
= extra+ P + I + E +i=n−1∑
i=2
Di
= 3 +Nn − 1
G∗(
1 +
j=n−1∏
j=2
(Nj − 1)
)+
i=n−1∑
i=2
j=i∏
j=2
(Nj − 1)
= 3 +Nn − 1
G+Nn − 1
G∗j=n−1∏
j=2
(Nj − 1) +i=n−1∑
i=2
j=i∏
j=2
(Nj − 1) (9.12)
IfNn−1 is not a multiple ofG, (Nn−1)/Gmust be replaced by b(Nn−1)/Gc+1
to account for the extra wait instructions. If the loop nest is a double loop nest, then the
last two terms of Equation 9.12 are equal to zero.
The synchronizations signals sent by the thread unit that executes the last outer-
most iteration group are received by the next thread unit, even if that thread unit is not
required to execute any other outermost iteration. Afterward the completion signal is sent
to the first thread unit.
9.4.5 Cross-Iteration Register Dependences
When distributing iteration groups over the thread units, an issue arises with the
cross-iteration register dependences. Those dependences are dependences between out-
ermost iterations involving values in registers and not spilled in memory. It is typical
an outermost loop counter for instance. On a uniprocessor, the problem does not exist
as there is a single register file. However, in the IBM 64-bit Cyclops architecture, each
thread unit has its own private register file which cannot be accessed by any other thread
unit. Values involved in a cross-iteration register dependence need to be copied from one
thread unit to the next.
A solution is to transform the register dependence into a memory dependence.
We issue memory spill instructions to copy the value from the register to a buffer in the
scratch-pad memory of the destination thread unit. The value is then restored using a
207

single memory load. The scratch-pad memory of the receiving thread unit was chosen
because memory spills are non-blocking and memory restores from the local scratch-pad
memory does not involve the crossbar network and can be executed in a matter of few
cycles. As the cross-iteration register dependences are known at compile-time, the buffer
and offset to its respective values are statically allocated.
TU i+1TU i
scratch−pad memory
...=R
restore
spill
R=R+1
...=R
restore
spill
R=R+1
R=R+1...=R
...=RR=R+1
buffer
localaccess
remoteaccess
cross−iteratonregister dependence
memory dependencecross−iteration
unnecessary memory
not emittedspills and restores are
register value accessedin next outermost iteration
known offset
Figure 9.10: Cross-Iteration Register Dependence Example
Memory spill instructions only need to be issued by the last outermost iteration
208

of an iteration group and memory restore instructions by the first. Within an instruction
group, the value is transferred from one outermost iteration to the next using registers as
usual. If the value is to be used by another outermost iteration than the next (meaning
that the distance of the cross-iteration register dependence is greater than 1), register
copies and memory spills/restores will bring that value to the recipient outermost iteration
naturally in a cascade fashion.
The mechanism is implemented by adding memory spill and restore instructions
at the ends of each cross-iteration dependence during the loop selection phase in the SSP
framework. The kernel generator then produces an SSP kernel which contains those extra
operations. While emitting the assembly code, the memory spill operations are removed
from every iteration but the last of an iteration group, and the memory restore operations
are removed from every iteration but the first of an iteration group. The removal of those
operations is accompanied by some register renaming to take the change into account.
Figure 9.10 shows an example of a cross-iteration register dependence. Register
R is used and then incremented by one in the first outermost iteration. The next outer-
most iteration uses the incremented value and increments again the value in the register.
Because the two outermost iterations are executed on the same thread unit, the register
is accessible to both iterations. However, the third iteration cannot access that register.
Instead, the value is spilled into a known location by the second iteration. The third iter-
ation retrieves the value from the buffer before using it. The spill and restore instructions
only appear in the first and last outermost iterations of an iteration group.
9.4.6 Code Generation Algorithms
The pseudo-code skeleton of the multi-threaded final schedule is shown in Fig-
ure 9.11. The details of the loop patterns are shown in Figure 9.12. The code is common
to all thread units and loaded to each thread unit. Then the first thread unit will initiate
the execution of the entire schedule when sending its first synchronization to the next
thread unit. The main loop iterates over the iteration groups that each thread unit must
209

[Initialization]
// Iterate over the iteration groupsi1 ← my thread idwhile i1 < N1 do
i1 ← i1 + num TUsclock counter ← clock counter + 1 // synchronization delay[Prolog]
for i2 = 0, N2 − 1 dofor i3 = 0, N3 − 1 do
. . .// Tiled ILPfor i = 1, (Nn − 1)/G do
wait()for g = 1, G do
[ILP]end forsignal()
end for. . .if i3 < N3 − 1 then
[DFP3]end if
end forif i2 < N2 − 1 then
[DFP2]end if
end for
rotate registers()[Epilog]signal() // extra signal for synchronization delay
end while
[Conclusion]
Figure 9.11: Multi-Threaded Code Skeleton
210

execute. Before executing one iteration group, the clock counter is incremented to force
the synchronization delay. An extra signal is added after executing each iteration group.
[Prolog] =wait()for i = f1, ln − 1 do
Emit Stages(f1, l1, Sn, 1, 0, i− f1 − (Sn − 1), ln − f1)if i < ln − 1 then
rotate registers()end if
end forsignal()
[ILP] =for i = 0, Sn− 1 do
Emit Stages(fn, ln, Sn, n,−i− 1, i, Sn)end for
[DFPlvl] =wait()for i = 0, llvl − flvl do
Emit Stages(flvl, llvl, Sn, lvl,−i− 1, fn − flvl + i, llvl − flvl + 1)end forsignal()
[Epilog] =wait()for i = ln, l1 + Sn− 1 do
Emit Stages(f1, l1, Sn −max(i− l1, 0), 1, 0, i− Sn + 1, l1 − ln + 1)rotate registers()
end forsignal()
Figure 9.12: Loop Patterns Expansion
Compared to the uniprocessor code for the Intel Itanium architecture presented in
Chapter 8, there is no outermost loop pattern anymore and the innermost loop pattern is
now tiled. Register rotation is still required in the prolog and epilog. The register rotation
emulation technique used for the other patterns is similar to the Itanium version and will
211

not be described here. The patterns are now surrounded by synchronization instructions: a
wait instruction before each pattern and a signal after. The synchronization instructions
for the innermost loop pattern are moved into the outer tiled loop.
EMIT STAGES(first stage, last stage, stage count, level, register offset,stage offset, total height)
for cycle = first cycle[level], f irst cycle[level] + T [level]− 1 dostage counter ← stage count
reg offset← register offsetstage← first stage+ stage offsetwhile stage ≤ last stage and stage counter > 0 do
if (operation is memory spill and stage counter 6= stage count)or (operation is memory restore and stage counter 6= 1) then
do not emit this operationend ifemit ops(level, stage, cycle, reg offset)stage counter ← stage counter − 1stage← stage+ 1
end while
reg offset← register offset+ total heightstage← first stagewhile stage counter > 0 do
if (operation is memory spill and stage counter 6= stage count)or (operation is memory restore and stage counter 6= 1) then
do not emit this operationend ifemit ops(level, stage, cycle, reg offset)stage counter ← stage counter − 1stage← stage+ 1
end whileend for
Figure 9.13: Stage Emission Algorithm
The stage emission routine, Emit Stages(), shown in Figure 9.13, also differs
from the Itanium version to take into account the features of the multi-threaded schedule
and the absence of predicate registers in the IBM 64-bit Cyclops architecture. The register
212
offsetting is now done manually to the function. For that purpose, the register offset is
passed as a parameter along total height, the number of instances of the kernel in the
pattern being emitted. Given the level level of the stages, the operations are emitted in
the order of their scheduling cycle. stage count stages are emitted starting from stage
first stage+ stage offset to stage last stage. If the number of emitted does not reach
stage count, then the emission continues starting from stage first stage. This cyclic
emission is required for the DFP and ILP patterns. Only the required memory spill/restore
operations are emitted. The others are discarded as explained in Section 9.4.5.
An operation is emitted using the emit ops() routine. Before emitting an oper-
ation in assembly code, some modification may occur. If the operations is a memory
spill/restore operation, then the address register must be switched to the register contain-
ing the address of the buffer in the next thread unit. That information is only known at
code-emission time and a dummy register had been used so far. Then, the register indexes
must adjusted according to the reg offset value.
[Initialization] =compute address of local buffercompute address of buffer in next thread unitcompute address of synchronization counter in next thread unitclock counter ← 1synchronization counter ← 0if current thread unit is first thread unit then
synchronization counter ← syncsPerGroupcopy live-in values in local buffer
end if
Figure 9.14: Initialization Code
The initialization code is shown in Figure 9.14. Each thread unit must compute
the address of the buffer and synchronization counter in the next thread unit. It differs
from one thread unit to the next. The synchronization counter is then initialized to 0 as
no synchronization signal has been received yet. The clock counter is set to 1 for all the
thread units but the first so that the thread units do not start until told so by the previous
213

thread unit. The clock counter of the first thread unit is initialized with the number of
synchronizations per iteration group to be able to execute the first iteration group without
requiring any synchronization signal. The live-in values are copied in the local buffer of
the first thread unit to bootstrap the execution.
[Conclusion] =if current thread unit executes last iteration group then
signal the first thread unitend ifif current thread unit is first thread unit then
wait()else
sleep()end if
Figure 9.15: Conclusion Code
The conclusion code is shown in Figure 9.15. The thread unit to execute the last
iteration group signals the first thread unit that the schedule is completed. All the thread
units, but the first, then go to sleep (or terminate). The first thread units waits for the
completion signal to arrive and returns.
In order to reduce the execution time of the schedule, the loop control instructions,
such as iteration index increment and trip count comparison, have been added to the
operations of the loop nest and therefore scheduled in the kernel. As such, the register
offset has been applied to the loop counter registers. The only instruction that has not been
scheduled in the kernel is the branch instruction. Therefore, the register offset must also
be applied to the branch instruction. The loop control register used should correspond to
the one last defined in the last outermost iteration in an iteration group.
9.4.7 Correctness
We present here two theorems that goes towards proving that the IBM 64-bit Cy-
clops multi-threaded schedule is correct.
214

Theorem 9.3 The synchronization signal guarantees that the memory accesses preceding
it have been committed.
Proof. The accesses to the crossbar network are managed in first-in first-out order at
the sending network port. A memory access will not travel across the network until the
receiving side can handle the memory access atomically. Therefore the memory accesses
issued over the network are guaranteed to be executed in sequential order from the point
of the view of the sending thread unit. In consequence, this property also guarantees that
when a signal instruction is issued, the preceding memory accesses have already been
committed. �
Theorem 9.4 The IBM 64-bit Cyclops multi-threaded final schedule is deadlock-free.
Proof. The signal instruction is non-blocking. We already proved in Theorem 9.1 that,
giving that condition, the multi-threaded final schedule was deadlock-free. The IBM 64-
bit Cyclops implementation adds the round-robin execution of the iteration groups and the
use of buffers. Buffer accesses are normal memory operations and do not change anything
to the correctness of the schedule. And the recurrence proof used in Theorem 9.1 can still
be applied despite the round-robin execution. �
9.5 Experimental Results
The multi-threaded SSP method was implemented in the Open64 compiler retar-
geted for the IBM 64-bit Cyclops architecture. The earlier steps up to the register alloca-
tion were also added unmodified to the compiler. Fourteen loop nests from the Livermore
Suite, SPEC2000 and NAS were compiled and evaluated using the simulator used by the
development team of the IBM 64-bit Cyclops architecture. Loop tiling factor of 1, 2, 4, 8,
16, 32, 64, and 128 were tested on the processor with 99 thread units. The execution time
absolute speedup was measured with 1, 3, 7, 15, 31, 63, and 99 thread units with the best
loop tiling factor measured. The issue width of a thread unit was assumed to be equal to
215

2 and the register file was assumed to be rotating. The problem size of each benchmark
was chosen as large as possible under the constraint that the simulator could compute the
output in 60 minutes for a total simulation time of 196 hours.
9.5.1 Execution Time Speedup
The scalability results for a representative set of benchmarks are shown in Fig-
ure 9.16. The best loop tiling factor for each benchmark was chosen. As the number of
thread units increases, the total execution time of the benchmarks dramatically reduces.
The ikj variant of matrix-multiply shows the best result with an absolute speedup of 81
for 100 thread units. The worst speedup, 42 for 100 thread units, was encountered when
evaluating benchmark livermore18.3.
0
20
40
60
80
100
100 64 32 16 8 4 2
Exe
cutio
n T
ime
Abs
olut
e Sp
eedu
p
Number of Thread Units
linear
speed
upmm-ikjsorg3hydroblaslivermore 18.3
Figure 9.16: Execution Time Absolute Speedup
Ideally, the execution time absolute speedup is linear. The difference is explained
by two facts. First, cross-iteration dependences prevent the outermost iteration group from
being executed in parallel and achieving a linear speedup. The second explanation is the
fixed cost of initializing the schedule. With 100 thread units, the cascaded initialization
of all the thread units is costly: thread unit i will not start before receiving two signals
from thread unit i − 1. Given a fixed number of outermost iterations, the more thread
units are used, the higher the initialization cost becomes. If the number of outermost
216

iterations is too small, the initialization becomes the dominant factor in the total execution
time. This explains why the difference between speedup curves and the linear speedup
curve increases as the number of thread units increases. When the number of outermost
iterations increases, so does the execution time speedup. For instance, when the number
of outermost iterations of the worst performing benchmark, livermore18.3, is multiplied
by a factor of only 4, the speedup for 99 thread units jumps from 42 to 67 1.
9.5.2 Loop Tiling Factor
The best loop tiling factor was searched for each of the benchmarks running on
the IBM 64-bit Cyclops processor with 99 thread units. A representative set of results are
shown in Figure 9.17. Overall, the benchmarks can be partitioned into 2 groups. In the
first group, loop tiling helps reducing the execution time of the benchmarks. For instance,
the ijk variant of matrix-multiply shows a speedup of 1.29 with a tile factor of 32 or
64. The second group, which includes blas, hydro and livermore18.3 in the graph, only
shows deteriorating speedup as the tiling factor increases.
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
128 64 32 16 8 4 2
Exe
cutio
n T
ime
Spee
dup
Loop Tiling Factor (G)
mm-ijkmm-kijg3blashydrolivermore 23
Figure 9.17: Loop Tiling Factor
1 Although increasing the problem size for all the benchmarks would improve thespeedup results, it was not attempted because of the time required to run the bench-marks on the IBM 64-bit Cyclops simulator.
217

The experimental results are in line with theoretical best value for G computed
in Equation 9.11. The best value for G for the benchmarks in the second group happens
to be 1 because the number of iterations of the inner loops is not large enough. Using
the measured average execution time of the wait instruction (14 cycles), the difference in
total execution time using the empirical best value for G and the theoretical best G value
(Gbest) was measured. The maximum recorded difference was 1.7% with an average of
0.3%. Gbest is therefore a very accurate approximation of the best value to be chosen for
G.
9.5.3 Synchronization Stalls
The stall cycles were measured for all the benchmarks and using 100 thread units
with the best loop tiling factor. The average execution time of the wait is 14 cycles
(synchronization delays excluded). It is exactly the time it takes to execute the instruction
when the data are already in the buffer. Therefore, the wait instruction never blocks.
The value could be further reduced by implementing the wait instruction as an atomic
instruction in the instruction set architecture.
However, such a dedicated instruction would have almost no impact on the total
execution time of the schedules. On average, the number of cycles to execute the wait
instructions represents only 0.2% of the total execution time with a maximum of 0.7%.
The cost of the wait instruction is therefore negligible.
9.5.4 Register Pressure
Finally, the register pressure was measured for each of the benchmark. The
average register pressure was measured at 55.1 registers with a maximum of 96 for
livermore8. That pressure is reasonable and much lower than for the Intel Itanium ar-
chitecture, considering that IBM 64-bit Cyclops registers are used both for floating-point
and integer values. Such difference is explained by the reduced issue width of the IBM
64-bit Cyclops processor. A limited issue width increases the initiation interval of the
218

0
16
32
48
64
80
96
112
128
Ave
rage
liver
mor
e23
liver
mor
e18.
3
liver
mor
e18.
2
liver
mor
e18.
1
liver
mor
e8
hydr
o
sor
blasg3
mm
-kji
mm
-kij
mm
-jki
mm
-jik
mm
-ikj
mm
-ijk
Reg
iste
r Pre
ssur
e
Figure 9.18: Register Pressure
kernel and therefore reduces the number of stages of the kernel. As a result, the number
of interfering lifetimes is also reduced.
The register pressure can be further reduced by tuning the register allocator to the
multi-threaded schedule. Indeed, the stretched intervals mentioned in Chapter 7 are now
non-existent and do not need to be accounted for anymore.
9.6 Related Work
There exists a very large number of related work that may be applied to schedule
loops on multi-threaded or multi-core architectures. However, they can only be applied to
single loops. MT-SSP is the first method to software-pipeline a loop nest on cellular archi-
tectures. The method produces a compact multi-threaded final schedule with minimized
synchronization costs. Some of the related work is presented here.
Several software-pipelining techniques [NE98, FLT99, SG00a, SG00b] were pro-
posed for clustered-VLIW architectures (Chapter 2). The IBM 64-bit Cyclops architec-
ture is fundamentally different as the thread units are independent from each other and
interconnected via a network instead of a bus. Extra synchronization is required for the
cellular architecture, which can easily step up the number of thread units to the hundreds
whereas clustered architectures are limited to tens of independent compute engines.
219

Decoupled Software-Pipelining [ORSA05] schedules a single loop over multiple
thread units. Instead of distributing the iterations over the thread units, the same thread
unit always executes the same group of operations. Thus, if an iteration can be partitioned
into groups, the first thread unit executes the first group of every iteration, the second
thread unit the second group and so on. However, if the number of thread units reaches
the hundreds, the thread units cannot be kept busy.
Other multi-threading techniques include speculative multi-threading with run-
time analysis, also called run-time parallelization of DOACROSS loops [Che94, TY96,
THA+99]. Threads are speculatively issued and killed as information about the execu-
tion of loops is known. Although those methods allow for a wider range of loops to be
scheduled, especially with pointer-chasing structures, the thread control overheads are
very high compared to MT-SSP.
Some work [dCZG06] was also done to efficiently port OpenMP to the IBM 64-bit
Cyclops architecture. However, OpenMP is high-level language requiring extra interven-
tion from the programmer and suffering from generic constructs overheads. MT-SSP is
directly applied at the instruction level and exclusively target loop nests.
9.7 Conclusion
In this chapter we presented a solution to software pipeline loop nests on multi-
threaded cellular architectures based on SSP. The method is named Multi-Threaded
Single-dimension Software-Pipelining (MT-SSP). Given the SSP kernel, a fully synchro-
nized multi-threaded final schedule is generated to efficiently execute the loop nest with-
out any modification to the source code. The schedule is proven deadlock-free and respect
all the dependence and resource constraints.
Code generation algorithms were presented for the IBM 64-bit Cyclops architec-
ture. Synchronization is done through the use of a Lamport’s clock on each thread unit.
The signal instruction is non-blocking to allow for faster execution. The synchroniza-
tion counter is placed in the local scratch-pad memory of the receiving thread unit to
220

limit network accesses and drastically reduce the execution time of the wait instruction.
Cross-iteration register dependences between thread units were handled through the use
of memory spill and restore operations to and from a buffer also in the scratch-pad mem-
ory of the receiving thread unit. Those operations are scheduled in the kernel.
Experimental results showed that multi-threaded SSP schedules scales up well
when the number of thread units increases. The implementation uses a very light-weight
synchronization method with only standard instructions of the IBM 64-bit Cyclops archi-
tecture. The loop tiling factor was shown to be correctly approximated using the definition
of Gbest. Finally, the register pressure appeared to be reasonable without taking any extra
steps to reduce it.
221

Chapter 10
CONCLUSION
10.1 Summary
This dissertation has introduced SSP, Single-dimension Software-Pipelining, as a
valid approach to schedule loop nests on both uniprocessors and cellular architectures. In
the search for more computational power, computer architects have reached a technology
wall. Increasing clock speed, on-chip cache, pipeline depth and the number of functional
units on uniprocessors does not suffice anymore. When power consumption and cooling
systems are added to the financial equation, the return on investments has clearly passed
the point of diminishing return.
This fact leads to a new generation of processor architectures based on a large
number of parallel threads running on simple but power-efficient thread units: cellular
architectures. The thread units are interconnected via a network and share memory dis-
tributed in banks also connected to the network. By distributing the computation power
over the entire chip and by reducing the hardware complexity, the power consumption
and cooling issues disappeared. Also, because a defect thread unit or memory bank does
not prevent the chip from running properly, defect chips can still be used. The production
of a cellular processor then shows a high yield and results in lower manufacturing costs,
alleviating the price barrier to enter the processor market.
However, the programmability issue still remained to be solved. How to program
applications that will rip the benefits of so much parallelism? How to synchronize the
threads executing on all the thread units? How to communicate data from one thread to
222

another in a timely fashion? This dissertation presented SSP, a method aimed at provid-
ing a solution to all those questions for loop nests, a program structure present in many
applications and which can represent up to 90% of the execution time in the scientific
domain.
SSP is a whole compilation framework which takes loop nests as an input at the
programming language level and produces the schedule in assembly code to execute the
loop nest on either a VLIW architecture or a cellular architecture. The different steps of
the methods were first implemented for a VLIW architecture with convenient loop dedi-
cated hardware support such as register rotation, predication and dedicated loop counters,
before being ported to cellular architectures. The entire framework for both VLIW and
cellular architectures are presented in this dissertation.
We first presented the theoretical framework behind SSP. Given a loop nest and
its multi-dimensional data dependence graph, the most profitable loop level is selected.
Profitability is based on criteria set by the user and is heuristic-based. The user might want
to reduce execution time, limit network traffic or reduce power consumption. Once a level
has been selected, the multi-dimensional dependence graph is simplified into a single-
dimension data dependence graph which will be used to generate the schedule for the loop
nest. The schedule functions for both perfect and imperfect loop nests are introduced,
along with their properties and correctness proofs. SSP is proved to subsume modulo
scheduling (MS) as a special case when the loop nest is a single loop. Experimental results
show that SSP schedules are faster than MS schedules for a large set of benchmarks, even
after loop nest transformations and optimizations such as loop tiling are used.
The different steps to generate the final schedule are then introduced. First, some
loop selection heuristics are presented. Then the design principles of three scheduling
methods are presented. All methods produce a kernel which is used to build the final
schedule of the loop nest. The first method schedules operations one loop level at a time
223

starting from the innermost. The second method schedules all the operations simulta-
neously, expanding the search space and therefore increasing the possibility of finding a
better solution. Finally, the last method is an hybrid approach between the first two in
order to overcome the disadvantages of both other methods. Experiments showed that
the second approach is too slow while the first and third methods find reasonably good
solutions.
When the kernel is computed, a fast and accurate scheme was presented to evaluate
the register pressure in the final schedule of the loop nest before even allocating register
to the loop variants of the loop nest. The evaluation is used to decide to continue with
computed kernel. If the register pressure is deemed too high and the architecture does not
provide enough registers to accommodate the schedule needs, then another loop level is
chosen or another kernel with a lower register pressure is computed. Experimental results
showed that the integer register pressure increases with the depth of the loop nest whereas
the floating-point register pressure tends to remain constant. With 128 integer registers
and 64 floating-point registers, most of the loop nests can be scheduled with SSP.
Then, we presented a normalized representation of the complex lifetimes of an
SSP schedule. The design allows for a fine-grain representation of the holes with those
lifetimes to allow for their interleaving on the register space-time cylinder. A method
is proposed to exploit the representation and compute a register allocation solution that
minimizes register usage. Results prove the importance of minimizing register usage and
show that the computed solutions are close to optimality.
A code generation scheme was also presented for the Intel Itanium VLIW archi-
tecture. The solution takes advantage of the available hardware support. To limit code
size expansion, register rotation, predication and dedicated loop counters were used. To
cope with the lack of multiple rotating register files, modulo-variable expansion with code
duplication was used. Experimental results showed that, despite the code size increase,
the memory footprint of the final schedule still fits in the L1 instruction cache.
224

Finally, we presented a code generation scheme for the IBM 64-bit Cyclops cellu-
lar architecture. The SSP schedule was modified into an Multi-Threaded SSP (MT-SSP)
schedule to accommodate the presence of the many thread units and the synchroniza-
tion needs. The provided solutions generate a multi-threaded synchronized schedule for
the loop nests that fully utilizes the computational power of the machine. Experimental
results showed that the performance increases linearly with the number of thread units.
10.2 Future Work
While this dissertation proved that SSP is a viable loop nest scheduling solution
for both VLIW and cellular architectures, there are many directions for future research.
The first direction is to increase the set of loop nests to which SSP can be applied
to. Currently, a loop level cannot be selected if it contains a negative dependence. How-
ever, it is entirely possible to transform the loop nest via loop skewing or loop retiming
to make the negative dependence disappear. It would transform the rectangular iteration
space into a parallelogram iteration space which would require some loop peeling. Also,
loop nests could include loop siblings, i.e. two or more consecutive loops at the same
loop level. Several kernels would have to be created and adjusted to match. The register
allocator would have to be modified to take into account the multiple kernels. Finally,
conditional statements should be accepted by SSP. The Itanium architecture offers a way
to convey the value of predicate register used as a guarding predicate of a predicated
instruction. Thus conditional statements could be if-converted and loop nests software-
pipelined. If the hardware does not support predication, reverse if-conversion could also
be used [WBHS92, WMHR93].
Second, the register pressure remains an issue, especially if more complex loop
nests with loop siblings and conditional statements are to be considered. Since the reg-
ister allocator already generates almost optimal solutions, the attention should be set to
the other steps of the SSP framework. One can imagine a set of loop nest transformations
before SSP that would reduce the register pressure of a given level. The loop selection
225

step could also avoid levels that are guaranteed to have a register pressure that is too high.
The register pressure evaluation mechanism could be modified to become incremental
and merged to the scheduler to generate register pressure oriented kernels. Also, inserting
register spill and restore instructions to the schedule to limit the number of stretched life-
times would strongly reduce the register pressure of SSP schedules. Finally, in MT-SSP,
the register allocator could be adapted to take into account the lifetimes features of the
multi-threaded final schedules. Currently, the register allocator conservatively assumes
an uniprocessor final schedule.
Third, some cross-iteration register dependences could be eliminated from the
ideal schedule in order to decrease the amount of memory accesses on a multi-threaded
cellular chip. Very often, those dependences concern the loop indexes whose values are
predictable. Their elimination would lead to a more compact kernel and buffer-free multi-
threaded schedule.
From a hardware point of view, the use of multiple rotating register files would
have to be considered to reduce the code size of the schedule in assembly code. The use
of multiple loop counters and shared registers between thread units could go a long way
to reduce synchronization costs, limit network traffic and reduce the memory footprint of
the schedule.
Finally, the user could have more influence on the schedule generated by SSP.
Currently, the number of outermost iterations executed in parallel is determined by the
number of stages of the innermost kernel (Sn). However, one can imagine that the user
could force the schedule to use fixed Sn value or a fixed initiation interval. Both have
a direct influence on the schedule itself and on the register pressure. The number of
available thread units could help determine the most profitable value for Sn. The impact
of fixed values would have to be investigated.
226

BIBLIOGRAPHY
[AAC+03] George Almasi, Eduard Ayguade, Calin Cascaval, Jose G. Castanos, Je-sus Labarta, Francisco Martınez, Xavier Martorell, and Jose E. Moreira.Evaluation of OpenMP for the Cyclops multithreaded architecture. InWorkshop on OpenMP Applications and Tools (WOMPAT) 2003, volume2716/2003, pages 69–83. Lecture Notes in Computer Science, January2003.
[ACC+90] Robert Alverson, David Callahan, Daniel Cummings, Brian Koblenz,Allan Portereld, and Burton Smith. The Tera computer system. In Pro-ceedings of the 1990 International Conference on Supercomputing, vol-ume 18(3), pages 1–6, Amsterdam, June 1990. ACM. Computer Archi-tecture News.
[ACC+03] George Almasi, Calin Cascaval, Jose G. Castanos, Monty Denneau,Derek Lieber, Jose E. Moreira, and Henry S. Warren, Jr. DissectingCyclops: a detailed analysis of a multithreaded architecture. ACMSIGARCH Computer Architecture News, 31(1):26–38, 2003.
[AG86] Erik Altman and Guang R. Gao. Optimal modulo-schedulingthrough enumeration. International Journal of Parallel Programming,26(3):313–344, 1986.
[AGG95] Erik R. Altman, R. Govindarajan, and Guang R. Gao. Scheduling andmapping: Software pipelining in the presence of structural hazards. InProceedings of the ACM SIGPLAN ’95 Conference on ProgrammingLanguage Design and Implementation, pages 139–150, La Jolla, Cali-fornia, June 18–21, 1995. SIGPLAN Notices, 30(6), June 1995.
[AJLA95] Vicki H. Allan, Reese B. Jones, Randall M. Lee, and Stephen J. Allan.Software pipelining. ACM Computing Surveys, 27(3):367–432, Septem-ber 1995.
[AK84] John R. Allen and Ken Kennedy. Automatic loop interchange. In Pro-ceedings of the SIGPLAN ’84 Symposium on Compiler Construction,pages 233–246, Montreal, Quebec, June 17–22, 1984. ACM SIGPLAN.SIGPLAN Notices, 19(6), June 1984.
227

[AKPW83] J. R. Allen, Ken Kennedy, Carrie Porterfield, and Joe Warren. Conver-sion of control dependence to data dependence. In Conference Recordof the Tenth Annual ACM Symposium on Principles of ProgrammingLanguages, pages 177–189, Austin, Texas, January 24–26, 1983. ACMSIGACT and SIGPLAN.
[AN88a] A. Aiken and A. Nicolau. Optimal loop parallelization. In Proceed-ings of the ACM SIGPLAN 1988 conference on Programming Languagedesign and Implementation, pages 308–317. ACM Press, 1988.
[AN88b] A. Aiken and A. Nicolau. Perfect pipelining: A new loop paralleliza-tion technique. In Proceedings of the 1988 European Symposium onProgramming, pages 308–317. Springer-Verlag, 1988.
[AN91] A. Aiken and A. Nicolau. A realistic resource-constrained software-pipelining algorithm. Advances in languages and compilers for parallelprocessing, 1991.
[ASR95] V. H. Allan, U. R. Shah, and K. M. Reddy. Petri net versus moduloscheduling for software pipelining. In Proceedings of the 28th AnnualInternational Symposium on Microarchitecture, pages 105–110, Ann Ar-bor, Michigan, November 29–December 1 1995. IEEE-CS TC-MICROand ACM SIGMICRO.
[AU77] A. V. Aho and J. D. Ullman. Principles of Compiler Design. Addison-Wesley Publishing Company, 1977.
[BG97] Doug Burger and James R. Goodman. Guest editors introduction:Billion-transistor architectures. Computer, 30(9):46–49, September1997. CPTRB4.
[BG04] Doug Burger and James R. Goodman. Billion-transistor architectures:There and back again. Computer, 37(3):22–28, March 2004.
[CCC+02] Calin Cascaval, Jose G. Castanos, Luis Ceze, Monty Denneau, ManishGupta, Derek Lieber, Jose E. Moreira, Karin Strauss, and Henry S. War-ren Jr. Evaluation of a multithreaded architecture for cellular computing.In Eighth International Symposium on High-Performance Computer Ar-chitecture (HPCA), page 311, February 2002.
[CCJ05] Patrick Carribault, Albert Cohen, and William Jalby. Deep Jam: Con-version of coarse-grain parallelism to instruction-level and vector paral-lelism for irregular applications. In Proceedings of the 2005 Conferenceon Parallel Architectures and Compilation Techniques (PACT’05), St-Louis, Missouri, USA, September 2005.
228
[CCK88] D. Callahan, J. Cocke, and K. Kennedy. Estimating interlock and im-proving balance for pipelined machines. Journal of Parallel and Dis-tributed Computing 5, pages 334–358, 1988.
[CDS96] S. Carr, C. Ding, and P. Sweany. Improving software-pipelining withunroll-and-jam. In Proc. 29th Annual Hawaii International Conferenceon System Sciences, pages 183–192, 1996.
[Cha81] Alan E. Charlesworth. An approach to scientific array processing:The architectural design of the AP-120B/FPS-164 family. Computer,14(9):18–27, September 1981.
[Cha82] G. J. Chaitin. Register allocation & spilling via graph coloring. In Pro-ceedings of the conference on Compiler Construction, pages 98–101.ACM Press, 1982.
[Che94] D.-K. Chen. Compiler Optimizations for Parallel Loops with Fine-grained Synchronization. Ph.D. dissertation, Department of ComputerScience, University of Illinois, Urbana, Illinois, 1994.
[CK91] David Callahan and Brian Koblenz. Register allocation via hierarchicalgraph coloring. In Proceedings of the ACM SIGPLAN 1991 conferenceon Programming language design and implementation (PLDI), pages192–203. ACM Press, 1991.
[CK94] S. Carr and K. Kennedy. Improving the ratio of memory operations offloating-point operations in loops. ACM Transactions on ProgrammingLanguages and Systems 16, 6:1768–1810, 1994.
[CLG02] J. Codina, J. Llosa, and A. Gonzalez. A comparative study of modulo-scheduling techniques. In Proc. of the 2002 International Conference onSupercomputing, June 2002.
[CNO+88] Robert P. Colwell, Robert P. Nix, John J. O’Donnell, David B. Papworth,and Paul K. Rodman. A VLIW architecture for a trace scheduling com-piler. IEEE Transactions on Computers, 37(8), August 1988.
[CR00] B. Calder and G. Reinman. A comparative survey of load speculationarchitectures. Journal of Instruction-Level Parallelism, volume 1, 2000.
[CWT+01] Jamison D. Collins, Hong Wang, Dean M. Tullsen, Christopher Hughes,Yong-Fong Lee, Dan Lavery, and John P. Shen. Speculative precom-putation: Long-range prefetching of delinquent loads. In Proceedingsof the 28th Annual International Symposium on Computer Architecture,
229
volume 29(2), pages 14–25, Goteborg, Sweden, June-July 2001. IEEEComputer Society and ACM SIGARCH. Computer Architecture News.
[dCZG06] Juan del Cuvillo, Weirong Zhu, and Guang R. Gao. Landing OpenMP onCyclops64: An efficient mapping of Open64 to a many-core system-on-a-chip. In Proceedings of the ACM International Conference on Com-puting Frontiers 2006, May 2006.
[dCZHG05] Juan del Cuvillo, Weirong Zhu, Ziang Hu, and Guang R. Gao. FAST:a functionally accurate simulation toolset for the Cyclops64 cellular ar-chitecture. In Proceedings of the Workshop on Modeling, Benchmarkingand Simulation, pages 11–20, June 2005.
[DG05] Alban Douillet and Guang R. Gao. Register pressure in software-pipelined nests: fast computation and impact on architecture design. InLCPC ’05: Proceedings of the 18th International Workshop on Lan-guages and Compilers for Parallel Computing, Hawthorne, NY, USA,October 2005. Lecture Notes in Computer Science.
[DH79] J. J. Dongarra and A. R. Hinds. Unrolling loops in FORTRAN. Software— Practice and Experience, 9(3):219–226, March 1979.
[DHB89] James C. Dehnert, Peter Y.-T. Hsu, and Joseph P. Bratt. Overlappedloop support in the Cydra 5. In Proceedings of the Third InternationalConference on Architectural Support for Programming Languages andOperating Systems, pages 26–38, April 3–6, 1989.
[DRG98] A. Dani, V. Ramanan, and R. Govindarajan. Register-sensitive softwarepipelining. In Proc. of the Merged 12th International Parallel Process-ing Symposium and 9th International Symposium on Parallel and Dis-tributed Systems, 1998.
[DRG06] Alban Douillet, Hongbo Rong, and Guang R. Gao. Multidimensionalkernel generation for loop nest software pipelining. In Proceedings of the2006 Europar, Dresden, Germany, August 29th–September 1st, 2006.Lecture Notes in Computer Science.
[DSRV99] A. Darte, R. Schreiber, B. R. Rau, and F. Vivien. A constructive solutionto the juggling problem of systolic array synthesis. Technical ReportRR1999-15, LIP, ENS-Lyon, January 1999.
[DSRV02] Alain Darte, Robert Schreiber, B. Ramakrishna Rau, and FredericVivien. Constructing and exploiting linear schedules with prescribedparallelism. ACM Trans. Des. Autom. Electron. Syst., 7(1):159–172,2002.
230

[DT93] James C. Dehnert and Ross A. Towle. Compiling for Cydra 5. Journalof Supercomputing, 7:181–227, May 1993.
[EDA94] Alexandre E. Eichenberger, Edward S. Davidson, and Santosh G. Abra-ham. Minimum register requirements for a modulo schedule. In Pro-ceedings of the 27th Annual International Symposium on Microarchi-tecture, pages 75–84, San Jose, California, November 30–December2,1994. ACM SIGMICRO and IEEE-CS TC-MICRO.
[EDA95] Alexandre E. Eichenberger, Edward S. Davidson, and Santosh G. Abra-ham. Optimum modulo schedules for minimum register requirements.In Conference Proceedings, 1995 International Conference on Super-computing, pages 31–40, Barcelona, Spain, July 3–7, 1995. ACMSIGARCH.
[EN90] Kemal Ebcioglu and Toshio Nakatani. A new compilation technique forparallelizing loops with unpredictable branches on a VLIW architecture.In David Gelernter, Alexandru Nicolau, and David Padua, editors, Lan-guages and Compilers for Parallel Computing, Research Monographs inParallel and Distributed Computing, chapter 12, pages 213–229. PitmanPublishing and the MIT Press, London, and Cambridge, Massachusetts,1990. Selected papers from the Second Workshop on Languages andCompilers for Parallel Computing, Urbana, Illinois, August 1–3, 1989.
[Fea94] Paul Feautrier. Fine-grain scheduling under resource constraints. In Ke-shav Pingali, Uptal Banerjee, David Gelernter, Alex Nicolau, and DavidPadua, editors, Proceedings of the 7th International Workshop on Lan-guages and Compilers for Parallel Computing, number 892 in LectureNotes in Computer Science, pages 1–15, Ithaca, New York, August 8–10, 1994. Springer-Verlag.
[FLT99] M.M. Fernandes, J. Llosa, and N. Topham. Distributed modulo-scheduling. In Procs. of the International Symposium on High-Performance Computer Architecture (HPCA), pages 130–134, January1999.
[GAG94] R. Govindarajan, Erik R. Altman, and Guang R. Gao. Minimizingregister requirements under resource-constrained rate-optimal softwarepipelining. In Proceedings of the 27th Annual International Symposiumon Microarchitecture, pages 85–94, San Jose, California, November 30–December2, 1994. ACM SIGMICRO and IEEE-CS TC-MICRO.
231

[GAG96] R. Govindarajan, Erik R. Altman, and Guang R. Gao. A framework forresource-constrained rate-optimal software-pipelining. IEEE Transac-tions on Parallel and Distributed Systems, 7(11):1133,1149, November1996.
[gcc03] The GNU compiler collection. http://gcc.gnu.org, November 2003.
[GCM+94] David M. Gallagher, William Y. Chen, Scott A. Mahlke, John C. Gyl-lenhaal, and Wen mei W. Hwu. Dynamic memory disambiguation usingthe memory conflict buffer. In Proceedings of the Sixth InternationalConference on Architectural Support for Programming Languages andOperating Systems, pages 183–193, San Jose, California, October 4–7,1994. ACM SIGARCH, SIGOPS, SIGPLAN, and the IEEE ComputerSociety. Computer Architecture News, 22, October 1994; Operating Sys-tems Review, 28(5), December 1994; SIGPLAN Notices, 29(11), Novem-ber 1994.
[GJ79] Michael R. Garey and David S. Johnson. Computers and Intractability:A Guide to the Theory of NP-Completeness. W. H. Freemann and Co.,New York, 1979.
[GSS+01] E. Granston, R. Scales, E. Stotzer, A. Ward, , and J. Zbiciak. Control-ling code size of software-pipelined loops on the tms320c6000 vliw dsparchitecture. In Proceedings of 3rd IEEE/ACM Workshop on Media andStream Processors, 2001.
[HGAM92] Laurie J. Hendren, Guang R. Gao, Erik R. Altman, and Chandrika Muk-erji. A register allocation framework based on hierarchical cyclic intervalgraphs. In Proc. of the 4th Int’l Conf. on Compiler Construction, pages176–191. Springer-Verlag, 1992.
[HMR+00] J. Huck, D. Morris, J. Ross, A. Knies, H. Mulder, and R. Zahir. Intro-ducing the IA-64 architecture. IEEE Micro, 20(5):12–23, 2000.
[HP03] John L. Hennessy and David A. Patterson. Computer Architecture: AQuantitative Approach. Morgan Kaufmann Publishers Inc., San Fran-cisco, CA, USA, 2003.
[Hu61] T. C. Hu. Parallel sequencing and assembly line problems. OperationsResearch, 9(6):841–848, November 1961.
[Huf93] Richard A. Huff. Lifetime-sensitive modulo scheduling. In Proceedingsof the ACM SIGPLAN ’93 Conference on Programming Language De-sign and Implementation, pages 258–267, Albuquerque, New Mexico,June 23–25, 1993. SIGPLAN Notices, 28(6), June 1993.
232
[IBM03] IBM. IBM research Blue Gene project.http://www.research.ibm.com/bluegene/, November 2003.
[Int01] Intel Corporation. Intel Itanium Architecture Software Manual, vol. 1-4,December 2001. http://developer.intel.com/design/itanium/family/.
[Jai91] Suneel Jain. Circular scheduling: A new technique to perform softwarepipelining. In Proceedings of the ACM SIGPLAN ’91 Conference onProgramming Language Design and Implementation, pages 219–228,Toronto, Ontario, June 26–28, 1991. SIGPLAN Notices, 26(6), June1991.
[Lam78] Leslie Lamport. Time, clocks, and the ordering of events in a distributedsystem. Communications of the ACM, 21(7), July 1978.
[Lam88] Monica Lam. Software pipelining: An effective scheduling techniquefor VLIW machines. In Proceedings of the SIGPLAN ’88 Conference onProgramming Language Design and Implementation, pages 318–328,Atlanta, Georgia, June 22–24, 1988. SIGPLAN Notices, 23(7), July1988.
[LAV98] Josep Llosa, Eduard Ayguade, and Mateo Valero. Quantitative evalua-tion of register pressure on software pipelined loops. International Jour-nal of Parallel Programming, 26(2):121–142, 1998.
[LF02] J. Llosa and S.M. Freudenberger. Reduced code size modulo schedulingin the absence of hardware support. In Proceedings of the 35th An-nual International Symposium on Microarchitecture, Istanbul, Turkey,December 2002.
[LGAV96] J. Llosa, A. Gonzalez, E. Ayguade, and M. Valero. Swing moduloscheduling: A lifetime sensitive approach. In Proc. of the Interna-tional Conference on Parallel Architectures and Compilation Techniques(PACT), pages 80–86, october 1996.
[LM05] Jian Li and Jose Martınez. Power performance considerations of parallelcomputing on chip multiprocessors. ACM Trans. on Architecture andCode Optimization, 2(4):397–422, December 2005.
[LVA96] J. Llosa, M. Valero, and E. Ayguade. Heuristics for register-constrainedsoftware pipelining. In Proceedings of the 29th Annual InternationalSymposium on Microarchitecture, pages 250–261, 1996.
233

[MCmWH+92] Scott A. Mahlke, William Y. Chen, Wen mei W. Hwu, B. RamakrishnaRau, and Michael S. Schlansker. Sentinel scheduling for VLIW and su-perscalar processors. In Proceedings of the Fifth International Confer-ence on Architectural Support for Programming Languages and Oper-ating Systems, pages 238–247, Boston, Massachusetts, October 12–15,1992. ACM SIGARCH, SIGOPS, SIGPLAN, and the IEEE ComputerSociety. Computer Architecture News, 20, October 1992; OperatingSystems Review, 26, October 1992; SIGPLAN Notices, 27(9), Septem-ber 1992.
[MD01] Kalyan Muthukumar and Gautam Doshi. Software pipelining of nestedloops. In Proceedings of the 10th International Conference on CompilerConstruction, CC 2001, volume 2027 in Lecture Notes in Computer Sci-ence, pages 165–181, 2001.
[ME92] Soo-Mook Moon and Kemal Ebcioglu. An efficient resource-constrained global scheduling technique for superscalar and VLIW pro-cessors. In Proceedings of the 25th Annual International Symposiumon Microarchitecture, pages 55–71, Portland, Oregon, December 1–4, 1992. ACM SIGMICRO and IEEE-CS TC-MICRO. SIG MICRONewsletter 23(1–2), December 1992.
[ME97] Soo-Mook Moon and Kemal Ebcioglu. Parallelizing nonnumerical codewith selective scheduling and software pipelining. ACM Transactions onProgramming Languages and Systems (TOPLAS), 19(6):853–898, 1997.
[MLC+92] Scott A. Mahlke, David C. Lin, William Y. Chen, Richard E. Hank, andRoger A. Bringmann. Effective compiler support for predicated execu-tion using the hyperblock. In Proceedings of the 25th Annual Interna-tional Symposium on Microarchitecture, pages 45–54, Portland, Oregon,December 1–4, 1992. ACM SIGMICRO and IEEE-CS TC-MICRO. SIGMICRO Newsletter 23(1–2), December 1992.
[Muc97] Steven S. Muchnick. Advanced Compiler Design and Implementation.Morgan Kaufmann Publishers Inc., 1997.
[NE98] E. Nystrom and A. E. Eichenberger. Effective cluster assignment formodulo scheduling. In Procs. of 31st International Symposium on Mi-croarchitecture, pages 103–114, 1998.
[NG93] Q. Ning and Guang R. Gao. A novel framework of register allocation forsoftware-pipelining. In Conf. Rec. of the 20th Annual ACM SIGPLAN-SIGACT Symposium on Principles of Programming Languages, pages29–42, January 1993.
234

[Ope03] Open64 compiler and tools. http://open64.sourceforge.net/, November2003.
[ORSA05] Guilherme Ottoni, Ram Rangan, Adam Stoler, and David I. August. Au-tomatic thread extraction with decoupled software pipelining. In Pro-ceedings of the 38th annual IEEE/ACM International Symposium on Mi-croarchitecture (MICRO’05), 2005.
[PHA02] D. Petkov, R. Harr, and S. Amarasinghe. Efficient pipelining of nestedloops: Unroll-and-squash. In 16th International Parallel and DistributedProcessing Symposium (IPDPS ’02 (IPPS & SPDP)), pages 19–19,Washington - Brussels - Tokyo, April 2002. IEEE.
[RA93] M. Rajagopalan and V. H. Allan. Efficient scheduling of fine grain paral-lelism in loops. In Proceedings of the 26th Annual International Sympo-sium on Microarchitecture, pages 2–11, Austin, Texas, December 1–3,1993. IEEE-CS TC-MICRO and ACM SIGMICRO.
[Rau94] B. Ramakrishna Rau. Iterative modulo scheduling: An algorithm forsoftware pipelining loops. In Proceedings of the 27th Annual Interna-tional Symposium on Microarchitecture, pages 63–74, San Jose, Califor-nia, November 30–December2, 1994. ACM SIGMICRO and IEEE-CSTC-MICRO.
[RDG05] Hongbo Rong, Alban Douillet, and Guang R. Gao. Register allocationfor software pipelined multi-dimensional loops. In PLDI ’05: Proceed-ings of the 2005 ACM SIGPLAN conference on Programming languagedesign and implementation, pages 154–167, New York, NY, USA, 2005.ACM Press.
[RDGG04] Hongbo Rong, Alban Douillet, Ramaswamy Govindarajan, andGuang R. Gao. Code generation for single-dimension software-pipelining for multi-dimensional loops. In Proceedings of the 2004 In-ternational Symposium on Code Generation and Optimization (CGO),pages 175–184. IEEE Computer Society, March 2004.
[RG81] B. R. Rau and C. D. Glaeser. Some scheduling techniques and an easilyschedulable horizontal architecture for high performance scientific com-puting. In Proceedings of the 14th Annual Microprogramming Work-shop, pages 183–198, Chatham, Massachusetts, October 12–15, 1981.ACM SIGMICRO and IEEE-CS TC-MICRO.
235

[RGSL96] John Ruttenberg, G. R. Gao, A. Stoutchinin, and W. Lichtenstein. Soft-ware pipelining showdown: optimal vs. heuristic methods in a produc-tion compiler. In Proceedings of the ACM SIGPLAN 1996 conference onProgramming language design and implementation, pages 1–11. ACMPress, 1996.
[RLTS92] B. R. Rau, M. Lee, P. P. Tirumalai, and M. S. Schlansker. Register alloca-tion for software pipelined loops. In Proceedings of the ACM SIGPLAN1992 conference on Programming language design and implementation(PLDI), pages 283–299, 1992.
[Ron01] Hongbo Rong. Software Pipelining of Nested Loops. Ph.D. dissertation,Tsinghua University, Beijing, China, 2001.
[RST92] B. Ramakrishna Rau, Michael S. Schlansker, and P. P. Tirumalai. Codegeneration schema for modulo scheduled loops. In Proceedings of the25th annual international symposium on Microarchitecture, pages 158–169, 1992.
[RTG+03] Hongbo Rong, Zhizhi Tang, Ramaswamy Govindarajan, Alban Douil-let, and Guang R. Gao. Single-dimension software pipelining of multi-dimensional loops. CAPSL Technical Memo 49, Department of Elec-trical and Computer Engineering, University of Delaware, Newark,Delaware, August 2003. In ftp://ftp.capsl.udel.edu/pub/doc/memos/.
[RTG+04] Hongbo Rong, Zhizhong Tang, Ramaswamy Govindarajan, AlbanDouillet, and Guang R. Gao. Single-dimension software pipelining formulti-dimensional loops. In Proceedings of the 2004 International Sym-posium on Code Generation and Optimization (CGO), pages 163–174.IEEE Computer Society, March 2004.
[RYYT89] B. Ramakrishna Rau, David W. L. Yen, Wei Yen, and Ross A. Towle.The Cydra 5 departmental supercomputer – design philosophies, deci-sions, and trade-offs. Computer, 22(1):12–35, January 1989.
[Sar00] Vivek Sarkar. Optimized unrolling of nested loops. In ConferenceProceedings of the 2000 International Conference on Supercomput-ing, pages 153–166, Santa Fe, New Mexico, May 8–11, 2000. ACMSIGARCH.
[SD05] Won So and Alexander G. Dean. Complementing software-pipeliningwith software thread integration. In Proceedings of LCTES’05, Chicago,Illinois, USA, June 2005.
236

[SG00a] J. Sanchez and A. Gonzalez. The effectiveness of loop unrolling formodulo scheduling in clustered VLIW architectures. In Procs. of the29th Int. Conf. on Parallel Processing, pages 555–562, August 2000.
[SG00b] J. Sanchez and A. Gonzalez. Modulo-scheduling for a fully-distributedclustered VLIW architecture. In Procs. of 33rd Int. Symp. on Microar-chitecture, December 2000.
[TEE+96] Dean M. Tullsen, Susan J. Eggers, Joel S. Emer, Henry M. Levy, Jack L.Lo, and Rebecca L. Stamm. Exploiting choice: Instruction fetch and is-sue on an implementable simultaneous multithreading processor. In Pro-ceedings of the 23rd Annual International Symposium on Computer Ar-chitecture, volume 24(2), pages 191–202. Computer Architecture News,May 1996.
[TEL95] Dean M. Tullsen, Susan J. Eggers, and Henry M. Levy. Simultaneousmulti-threading: Maximizing on-chip parallelism. In Proceedings of the22nd Annual International Symposium on Computer Architecture, vol-ume 23(2), pages 392–403. Computer Architecture News, May 1995.
[THA+99] J.Y. Tsai, J. Huang, C. Amlo, D.J. Lilja, and P.C. Yew. The superthreadedprocessor architecture. IEEE Transactions on Computers, Special Issueon Multithreaded Architectures, 48(9), September 1999.
[The99] Kevin Theobald. EARTH: An Efficient Architecture for RunningThreads. Ph.D. dissertation, McGill University, Quebec, Canada, May1999.
[TY96] J.Y. Tsai and P.C. Yew. The superthreaded architecture: Thread pipelin-ing with run-time data dependence checking and control speculation. InProceedings of the 1996 Conference on Parallel Architectures and Com-pilation Techniques (PACT’96), pages 35–46, October 1996.
[WBHS92] N. J. Warter, J. W. Bockhaus, G. E. Haab, and K. Subramanian. En-hanced modulo scheduling for loops with conditional branches. In Pro-ceedings of the 25th Annual International Symposium on Microarchitec-ture, Portland, Oregon,USA, 1992. ACM and IEEE.
[WG96] Jian Wang and Guang R. Gao. Pipelining-dovetailing: A transformationto enhance software pipelining for nested loops. In Proceedings of the6th International Conference on Compiler Construction, CC ’96, Lec-ture Notes in Computer Science, pages 1–17, Linkoping, Sweden, April22–26, 1996. Springer-Verlag.
237

[WKEE94] Jian Wang, Andreas Krall, M. Anton Ertl, and Christine Eisenbeis. Soft-ware pipelining with register allocation and spilling. In Proceedings ofthe 27th Annual International Symposium on Microarchitecture, pages95–99, San Jose, California, November 30–December2, 1994. ACMSIGMICRO and IEEE-CS TC-MICRO.
[WL91a] Michael E. Wolf and Monica S. Lam. A data locality optimizing al-gorithm. In Proceedings of the ACM SIGPLAN ’91 Conference on Pro-gramming Language Design and Implementation, pages 30–44, Toronto,Ontario, June 26–28, 1991. SIGPLAN Notices, 26(6), June 1991.
[WL91b] Michael E. Wolf and Monica S. Lam. A loop transformation theory andan algorithm to maximize parallelism. IEEE Transactions on Paralleland Distributed Systems, 2(4):452–471, October 1991.
[WMC+93] W.Hwu, S. A. Mahlke, W. Y. Chen, P. P. Chang, N. J. Warter, R. A.Bringmann, R. G. Ouellette, R. E. Hank, T. Kiyohara, G. E. Haab, J. G.Holm, and D. M. Lavery. The Superblock: An effective technique forVLIW and superscalar compilation. Journal of Supercomputing, 1993.
[WMC98] Michael E. Wolf, Dror E. Maydan, and Ding-Kai Chen. Combiningloop transformations considering caches and scheduling. Int. J. ParallelProgram., 26(4):479–503, 1998.
[WMHR93] N. J. Warter, S. A. Mahlke, W.-M. W. Hwu, and B. R. Rau. Reverse if-conversion. In Proceedings of the ACM SIGPLAN 1993 Conference onProgramming Language Design and Implementation (PLDI’93), pages290–299, New York, NY, USA, 1993. ACM Press.
[Wol86] Michael Wolfe. Loop skewing: The wavefront method revisited. In-ternational Journal of Parallel Programming, 15(4):279–293, August1986.
[Wol92] Michael E. Wolfe. Improving Locality and Parallelism in Nested Loops.Ph.D. dissertation, Stanford University, Stanford, CA, August 1992.
[Woo79] Graham Wood. Global optimization of microprograms through modularcontrol constructs. In Proc. of the 12th Annual Workshop in Micropro-gramming, pages 1–6, 1979.
[ZLAV00] Javier Zalamea, Josep Llosa, Eduard Ayguade, and Mateo Valero. Two-level hierarchical register file organization for vliw processors. In Proc.of the symp. on Microarch., pages 137–146, 2000.
238