a benchmark and simulator for uav tracking - eccv2016.org · a benchmark and simulator for uav...
TRANSCRIPT
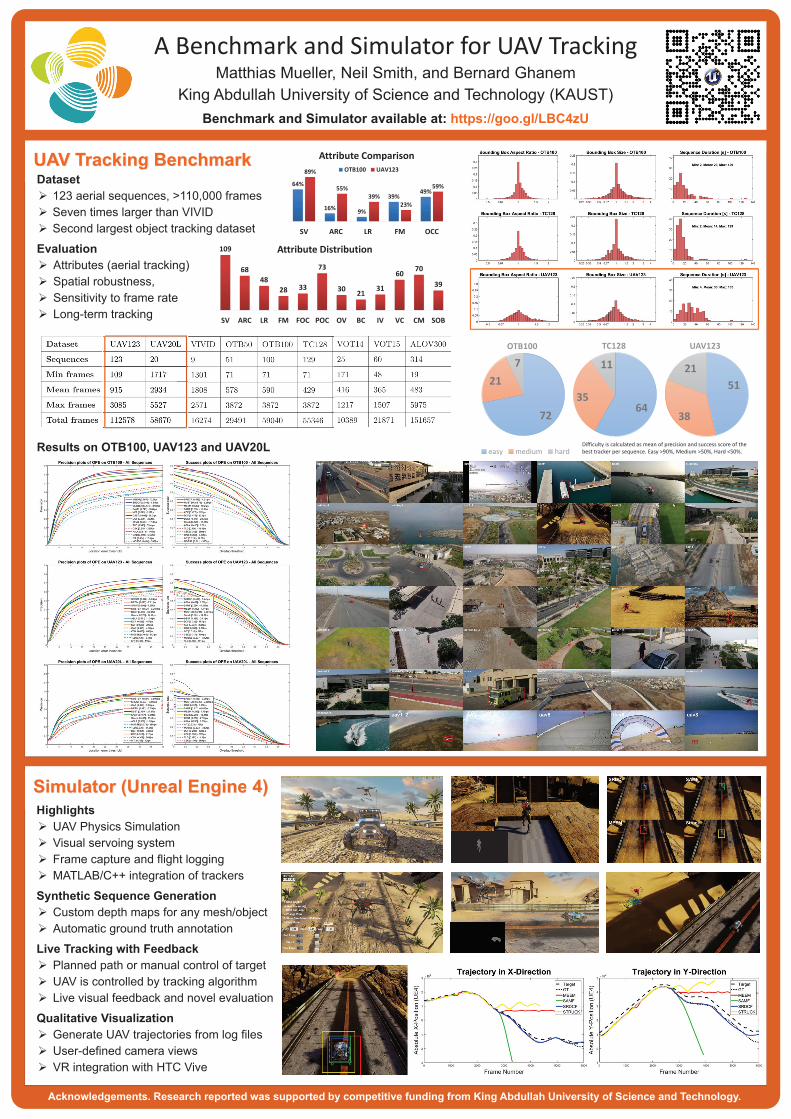
A Benchmark and Simulator for UAV TrackingMatthias Mueller, Neil Smith, and Bernard Ghanem
King Abdullah University of Science and Technology (KAUST)
Acknowledgements. Research reported was supported by competitive funding from King Abdullah University of Science and Technology.
UAVV Trackingg BenchmarkDataset
123 aerial sequences, >110,000 framesSeven times larger than VIVIDSecond largest object tracking dataset
EvaluationAttributes (aerial tracking)Spatial robustness,Sensitivity to frame rateLong-term tracking
Results on OTB100, UAV123 and UAV20L
6435
11
TC128
51
38
21
UAV123
72
217
OTB100
easy medium hardDifficulty is calculated as mean of precision and success score of the best tracker per sequence. Easy >90%, Medium >50%, Hard <50%.
64%
16% 9%
39%49%
89%
55%39%
23%
59%
SV ARC LR FM OCC
Attribute ComparisonOTB100 UAV123
109
6848
28 33
73
30 21 31
60 70
39
SV ARC LR FM FOC POC OV BC IV VC CM SOB
Attribute Distribution
Simulatorr (Unrealal Enginee 444)Highlights
UAV Physics SimulationVisual servoing systemFrame capture and flight loggingMATLAB/C++ integration of trackers
Synthetic Sequence GenerationCustom depth maps for any mesh/objectAutomatic ground truth annotation
Live Tracking with FeedbackPlanned path or manual control of targetUAV is controlled by tracking algorithmLive visual feedback and novel evaluation
Qualitative VisualizationGenerate UAV trajectories from log filesUser-defined camera viewsVR integration with HTC Vive
Benchmark and Simulator available at: https://goo.gl/LBC4zU