6. reflection seismology
TRANSCRIPT
2014/5/26
- 1 -
6. Reflection Seismology
反射法地震探査は,垂直反射波(より正確に言えば pre-critical reflection)を用いて地下構
造を imaging するものである.この手法は 1910 年代に登場したものであるが,1930 年代に
は石油資源探査の主流となっていった.1960 年代から始まるコンピュータ技術の発達に伴
い,反射法探査は大きな発展をみた.観測データはデジタル化し,弾性波動場の伝播理論
に基づく様々な処理技術が開発された.このような処理技術の中には,自然地震の解析に
も有効なものも多い.反射法地震探査は,1970 年代後半から地球科学の分野にも直接応用
されるようになり,その結果として地殻・上部マントル構造研究が飛躍的な進展を遂げた.
反射法探査では,稠密な receiver と高密度の shot から得られる膨大なデータから,信号処
理のテクニックを駆使して地下構造を imaging する.実際に観測された反射波から,対応す
る反射体を正しい深さに mapping するには地下速度の情報が必要である.しかし,後述の
ように,通常の反射法データ処理では地下速度を押さえるにはやや難がある.一方,前章
で述べた屈折法地震探査は解像度では反射法地震探査に劣るものの,地下速度を推定する
には有効な方法である.この意味で,これら二つの手法は相補的である.実際,近年の大
規模反射法地震探査では,屈折法探査を同時に実施する場合が多い.
6.1 反射法地震探査のデータ取得法
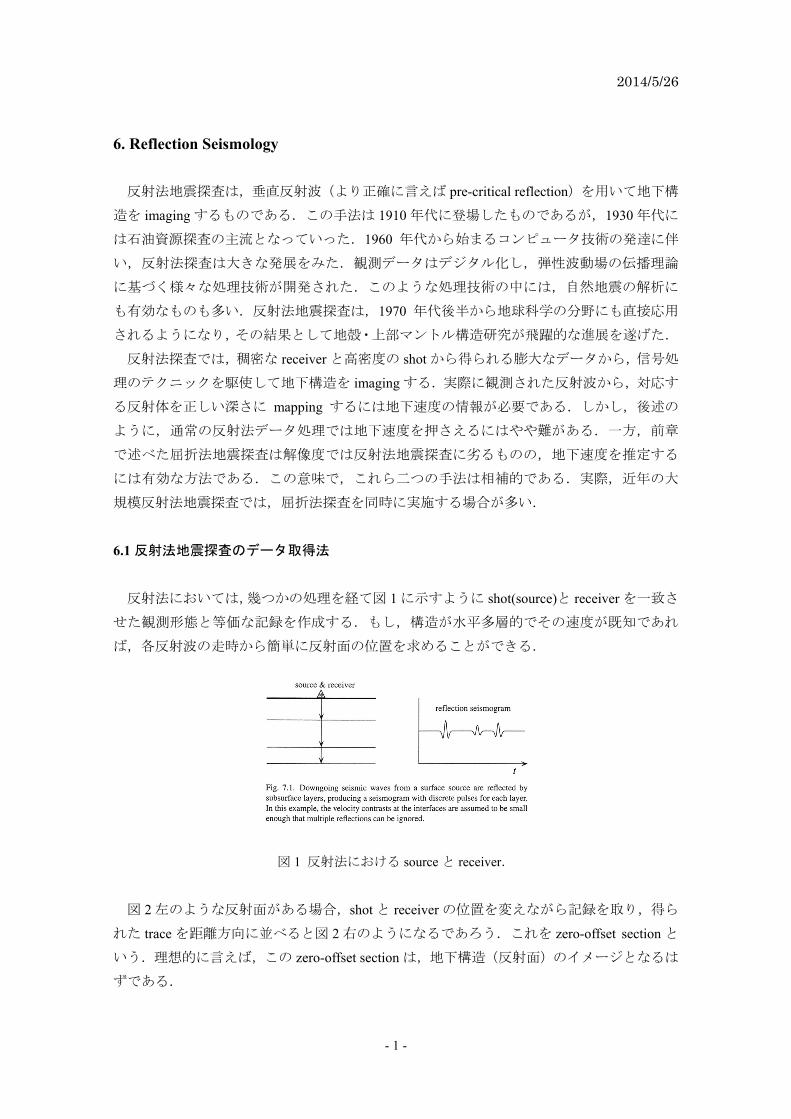
反射法においては,幾つかの処理を経て図 1 に示すように shot(source)と receiver を一致さ
せた観測形態と等価な記録を作成する.もし,構造が水平多層的でその速度が既知であれ
ば,各反射波の走時から簡単に反射面の位置を求めることができる.
図 1 反射法における source と receiver.
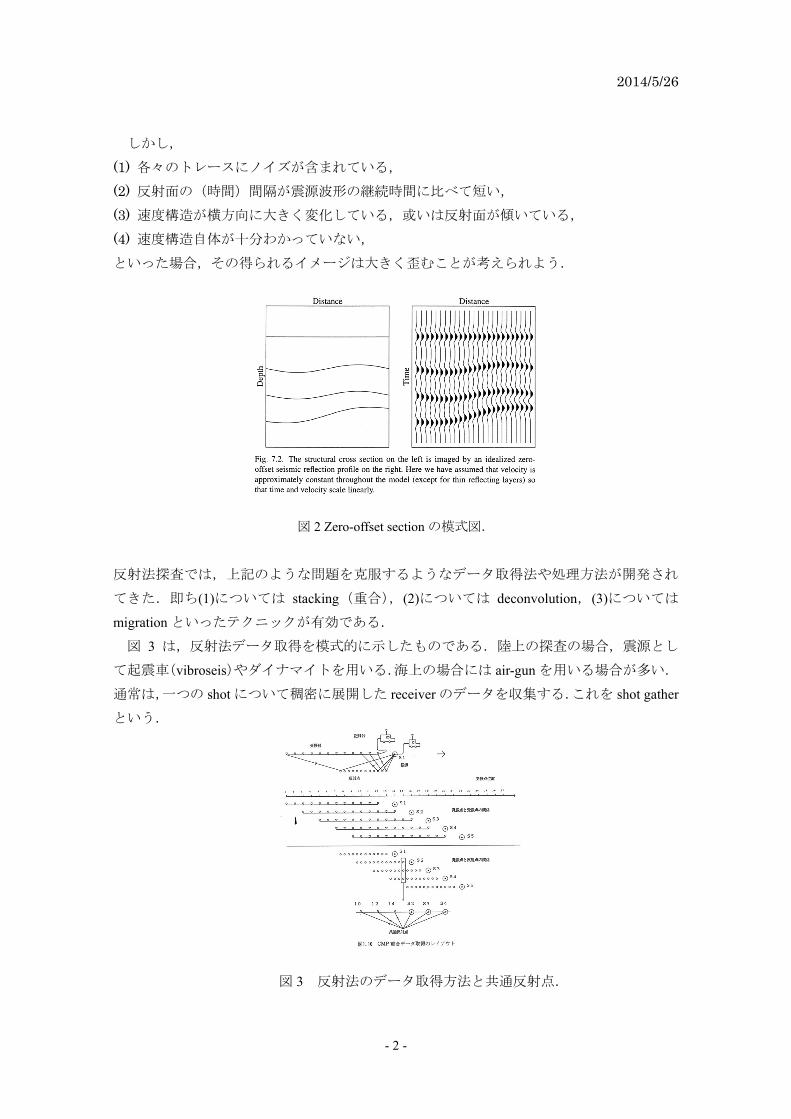
図 2 左のような反射面がある場合,shot と receiver の位置を変えながら記録を取り,得ら
れた trace を距離方向に並べると図 2 右のようになるであろう.これを zero-offset section と
いう.理想的に言えば,この zero-offset section は,地下構造(反射面)のイメージとなるは
ずである.
2014/5/26
- 2 -
しかし,
(1) 各々のトレースにノイズが含まれている,
(2) 反射面の(時間)間隔が震源波形の継続時間に比べて短い,
(3) 速度構造が横方向に大きく変化している,或いは反射面が傾いている,
(4) 速度構造自体が十分わかっていない,
といった場合,その得られるイメージは大きく歪むことが考えられよう.
図 2 Zero-offset section の模式図.
反射法探査では,上記のような問題を克服するようなデータ取得法や処理方法が開発され
てきた.即ち(1)については stacking(重合),(2)については deconvolution,(3)については
migration といったテクニックが有効である.
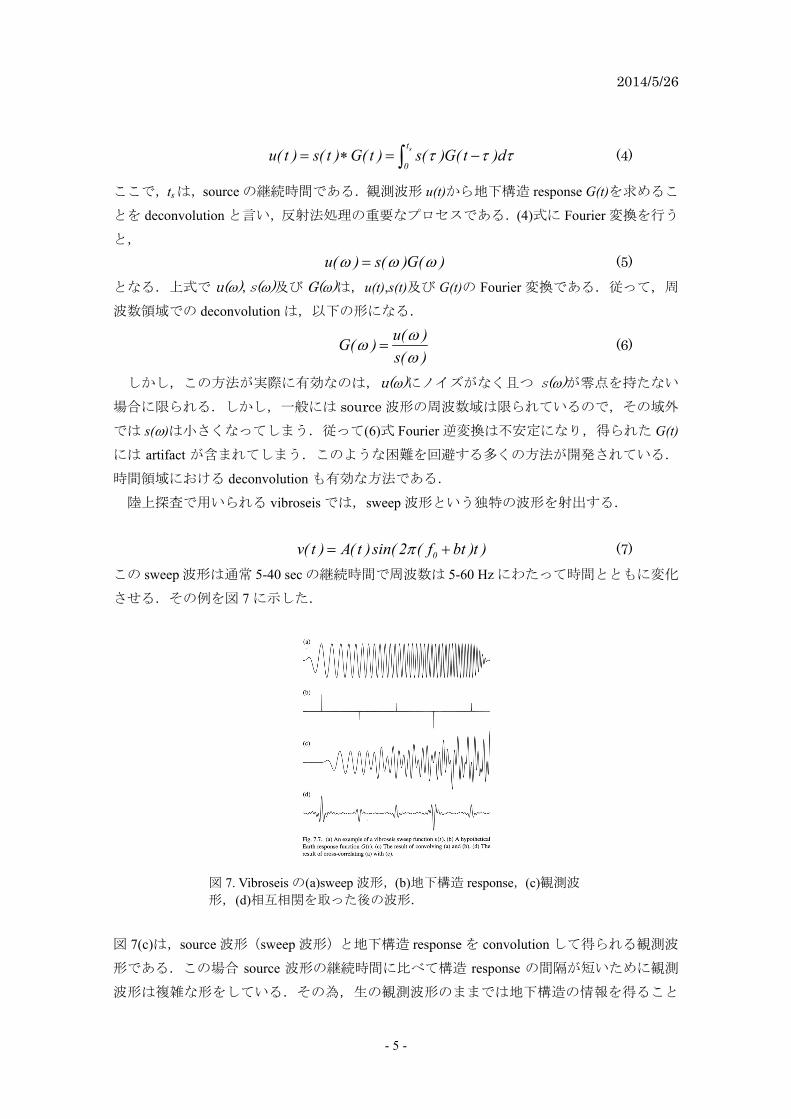
図 3 は,反射法データ取得を模式的に示したものである.陸上の探査の場合,震源とし
て起震車(vibroseis)やダイナマイトを用いる.海上の場合には air-gun を用いる場合が多い.
通常は,一つの shot について稠密に展開した receiver のデータを収集する.これを shot gather
という.
図 3 反射法のデータ取得方法と共通反射点.

2014/5/26
- 3 -
6.2 共通反射点(CMP)重合と normal move out
今,反射面が水平であるとしよう.この場合,shot からの波が反射してある receiver に到
達する場合,その反射点は shot 点とその receiver の中点になる.そこで,図 3 の一番下に示
す様な反射点を共有する shotと receiverのペアを選び,その traceをまとめる.これをCommon
midpoint gather(CMP gather)という.その shot と receiver と距離を横軸に取って並べると,図
4 のようになる.
図 4 共通反射点を持つ trace の section と normal move out.
この場合の shot と receiver の距離を x,反射面の深さを H,媒質の速度を v とすれば(図 5),
その走時は,
( r ) 2 2T ( x ) 2 H ( x / 2 ) / v (1)
距離 x にある trace を距離 x=0 にある trace(即ち図 1 のような場合)に変換することを考え
よう.(1)式は,
2 2
( r ) ( r ) 2 ( r )0 02 2 ( r ) 2
0
x xT ( x ) (T ) T 1
v v (T )
( r )0
2HT
v (2)
と書き換えることができる.従って,
2 2( r ) ( r )
NMO 0 02 ( r ) 2 2 ( r )0 0
x xt T 1 T
v (T ) 2v T (3)

2014/5/26
- 4 -
だけの時間補正を行えば,距離 x にある trace を距離 x=0 にある trace に変換できる(図 5 下
図).これを”normal move out”という.図 4 の左の trace を normal move out した波形を右に示
した.そして,S/N を高める目的で,反射点を共有する trace を normal move out して加え,
一本の trace とする.この操作を CMP stacking(重合)と呼ぶ.
図 5 反射法の走時と NMO 補正量(ΔtNMO).
6.3 Deconvolution
図 6 に,海域反射法地震探査の場合の(a)source 波形(エアガンによる波形),(b)地下構造
response(反射 response)及び(c)観測波形を示した.
図 6 海域探査の場合の(a)source 波形,(b)地下構造 respoponse 及び(c)観測波形.
数学的に,(c)の観測波形 u(t)は,(a)の波形 s(t)と(b)の波形 G(t)の畳み込み(convolution)と
なる.即ち,
2014/5/26
- 5 -
st
0u( t ) s( t ) G( t ) s( )G( t )d (4)
ここで,tsは,source の継続時間である.観測波形 u(t)から地下構造 response G(t)を求めるこ
とを deconvolution と言い,反射法処理の重要なプロセスである.(4)式に Fourier 変換を行う
と,
u( ) s( )G( ) (5)
となる.上式で u(),s()及び G()は,u(t),s(t)及び G(t)の Fourier 変換である.従って,周
波数領域での deconvolution は,以下の形になる.
u( )G( )
s( )
(6)
しかし,この方法が実際に有効なのは,u()にノイズがなく且つ s()が零点を持たない
場合に限られる.しかし,一般には source 波形の周波数域は限られているので,その域外
では s()は小さくなってしまう.従って(6)式 Fourier 逆変換は不安定になり,得られた G(t)
には artifact が含まれてしまう.このような困難を回避する多くの方法が開発されている.
時間領域における deconvolution も有効な方法である.
陸上探査で用いられる vibroseis では,sweep 波形という独特の波形を射出する.
0v( t ) A( t )sin( 2 ( f bt )t ) (7)
この sweep 波形は通常 5-40 sec の継続時間で周波数は 5-60 Hz にわたって時間とともに変化
させる.その例を図 7 に示した.
図 7. Vibroseis の(a)sweep 波形,(b)地下構造 response,(c)観測波
形,(d)相互相関を取った後の波形.
図 7(c)は,source 波形(sweep 波形)と地下構造 response を convolution して得られる観測波
形である.この場合 source 波形の継続時間に比べて構造 response の間隔が短いために観測
波形は複雑な形をしている.その為,生の観測波形のままでは地下構造の情報を得ること

2014/5/26
- 6 -
は難しい.そこで,観測波形(c)と source 波形(a)の cross-correlation(相互相関)を取る.こ
れによって地下構造情報の抽出が可能となる.
まず,相互相関を数学的に定義しておこう.2 つの実函数,a(t)と b(t)の cross-correlation f(t)
は,
f ( t ) a( t ) b( t ) a( t )b( )d
(8)
と与えられる.convolution の定義(式(4))を参照し,以下の関係が得られる.
a( t ) b( t ) a( t ) b( t ) (9)
即ち,cross-correlation は可換ではない.
さて,観測波形(c)と source 波形(a)の cross-correlation u’(t)は,
u'( t ) v( t ) v( t ) G( t ) v'( t ) G( t ) (10)
と変形できる.ここで,
v'( t ) v( t ) v( t ) v( t ) v( t ) (11)
v’(t)は,v(t)の自己相関(autocorrelation)と呼ばれ,t=0 に関して対称であり,v(t)に比べて遙か
に急峻な peak を持つ.従って,(11)式はより sharp な source 波形と構造 response の convolution
と言うことになる.もともとの source 波形との cross-correlation を取るという手法は簡単な
deconvolution の一つであり,しばしば”spike deconvolution”と呼ばれる.
6.4 Migration
図 8 のような簡単な反射面を考えよう.反射面は平面であるとする.
図 8 傾斜した反射面の mapping.
図 8 の右は zero-offset section である.この場合,反射点の位置(時間)を各 shot(各 receiver

2014/5/26
- 7 -
の位置でもある)の真下の C 点に mapping している.しかし,これは波線理論的には正し
くない.何故ならば,反射面において反射の法則を満たしていないからである.実際の反
射点は,図 8 の左に示される位置にある筈である.また,反射面の角度については,
a bsin tan (12)
となることが容易に示される.Zero-offset section 上の反射体の位置を正しい位置に変換する
操作を migration という.その操作を幾何学的に示したものが図 9 である.
図 9. Migration の幾何学的説明.
即ち,zero-offset section 上の反射面 CD は,正しくは C’D’上に移動する.この操作の重要な
特徴は,
(1) 反射面の長さは,短くなる.
(2) 反射面の傾きは,急になる.
(3) 反射面は,up-dip の方向に移動する.
6.4.1 Huygens の原理と Kirchhoff migration method
Migration の方法を回折波の原理を用いて考えてみよう.ここで,反射面は,二次的な波
源の集合体と考える.Huygens の原理(図 10)によって,各々の波源からは回折波が伝搬
していくものとする.反射波はその回折波の集まった干渉作用の結果と考えるのである.
従って, migration では,観測された波形から回折波の伝搬に沿って波動場を反射面上の二次
波源まで戻すことになる.

2014/5/26
- 8 -
図 10. Huygens の原理.
ここで,図 11 のように一つの二次波源が深さ H に存在する場合を考えよう.
図 11 二次震源から発生する回折波.
この場合,x における往復走時 T(r)(x)は,
2 2( d ) 2 x H
T ( x )v
(13)
この式は,
2 ( d ) 2 2
2 2
v (T ) x1
4H H (14)
或いは
2014/5/26
- 9 -
( d ) 2 2
( d ) 2 2 ( d ) 20 0
(T ) 4x1
(T ) v (T ) (15)
と書き直すことができる.ここで,
( d )0T 2H / v (16)
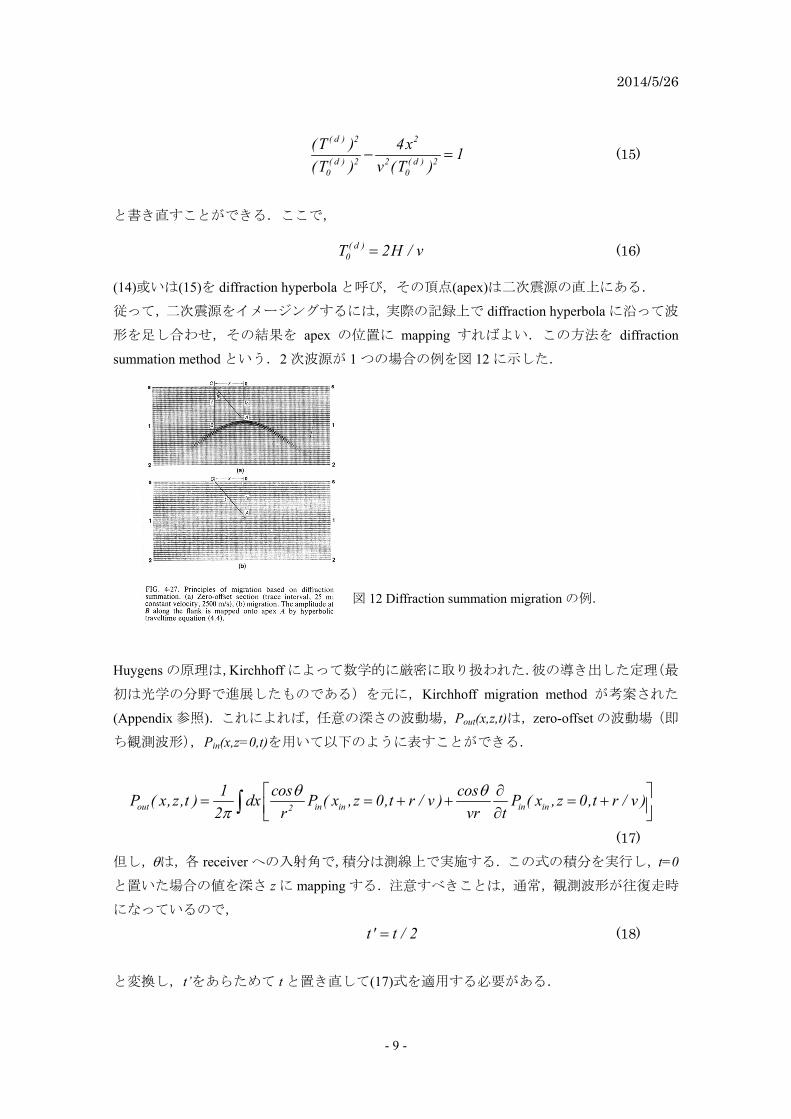
(14)或いは(15)を diffraction hyperbola と呼び,その頂点(apex)は二次震源の直上にある.
従って,二次震源をイメージングするには,実際の記録上で diffraction hyperbola に沿って波
形を足し合わせ,その結果を apex の位置に mapping すればよい.この方法を diffraction
summation method という.2 次波源が 1 つの場合の例を図 12 に示した.
図 12 Diffraction summation migration の例.
Huygens の原理は,Kirchhoff によって数学的に厳密に取り扱われた.彼の導き出した定理(最
初は光学の分野で進展したものである)を元に,Kirchhoff migration method が考案された
(Appendix 参照).これによれば,任意の深さの波動場,Pout(x,z,t)は,zero-offset の波動場(即
ち観測波形),Pin(x,z=0,t)を用いて以下のように表すことができる.
out in in in in2
1 cos cosP ( x,z,t ) dx P ( x ,z 0,t r / v ) P ( x ,z 0,t r / v )
2 r vr t
(17)
但し,は,各 receiver への入射角で,積分は測線上で実施する.この式の積分を実行し,t=0
と置いた場合の値を深さ z に mapping する.注意すべきことは,通常,観測波形が往復走時
になっているので,
t ' t / 2 (18)
と変換し,t’をあらためて t と置き直して(17)式を適用する必要がある.

2014/5/26
- 10 -
8.4.2 F-K migration
地表において観測された波動場 P(x,z=0,t)が,深さ z で時刻 t=0 に発生した波であると考
え,P(x,z,t=0)を波動方程式から求めることとする.次式のような 2 次元波動方程式を考え
よう.座標軸を鉛直下向きに取るものとする.
2 2 2
2 2 2 2
1( )P( x,z,t ) P( x,z,t )
x z v t
(19)
簡単のため,速度 v は一定とする.更に Fourier 変換を以下のように定義する.
x xP k ,z, P( x,z,t )exp( jk x j t )dxdt
x x x2
1P( x,z,t ) P k ,z, exp( jk x j t )dk d
( 2 )
(20)
P(kx,z,を用いて(19)式を書き直すと,
2 2
2x x x2 2
P k ,z, ( k )P k ,z, 0z v
(21)
を得る.今,upcoming wave を考えると,
2
2 1/ 2x x x2
P k ,z, P k ,0, exp[ j( k ) z ]v
(22)
ここで,鉛直方向の波数 kzを下記のように定義する.
1/ 22 2x
z 2
v kk 1 ( )
v
(23)
これを分散関係という.(22)式は,kzを用いて,
x x zP k ,z, P k ,0, exp( jk z ) (24)
即ち,深さ z におけるスペクトル P(kx,z,は,地表におけるスペクトル P(kx,0,に exp(jkzz)
という all-pass filter をかけることによって得られる.これを下方接続(downward continuation)
と言う.(24)式を Fourier 逆変換すると,
x x z x x2
1P( x,z,t ) P k ,0, exp( j t jk x jk ( ,k )z )dk d
( 2 )
(25)
ここで,t=0 とおけば
x x z x x2
1Im age( x,z ) P( x,z,t 0 ) P k ,0, exp( jk x jk ( ,k )z )dk d
( 2 )
(26)

2014/5/26
- 11 -
しかし,この積分は,実行する上で非能率的である.何故ならば,ある z の深さに対し,被
積分函数をいちいち評価し直さなければならない.
そこで,積分変数を kzに変換する.
2 2z x zsgn( k )v k k (27)
であるので,
zzz 2 2 2 2
z x z x z
kkdsgn( k )v v
dk k k k k
(28)
となる.従って,
zx x z x z2 2 2
x z
k1Im age( x,z ) P k ,0, v exp( jk x jk z )dk dk
( 2 ) k k
(29)
となる.(29)式は,kx と kz に関する二重 Fourier 逆変換であり,被積分函数の中の指数函数
(Fourier 核)以外の部分を,1 回計算しておけばよいことになる.
6.5 速度解析
CMP 重合の場合も migration の場合も,速度 v の値が正確であることが非常に重要である.
(2)式を書き直すと,
( r ) 2 2
( r ) 2 2 ( r ) 20 0
(T ) x1
(T ) v (T ) (30)
この式は,反射面より上の速度 v が一定の場合に成立するものである.
しかし,v が場所の函数であった場合も,近似的に成立するとして(30)式の形で表すことが
できると仮定する.即ち(30)式を満たすように(30)式の v に相当する速度を求める.その速
度を vRMS(RMS 速度)と呼ぶ(第 5 章の 5.2.2 節参照).vRMSは,反射面毎に求めていくもので
ある.n-1 番目の反射面の vRMSと n 番目の vRMSから,2 つの反射面に夾まれた部分の速度を
求めることができる.これを区間速度と呼ぶ.このようにして,地下の速度を求めていく
プロセスを速度解析という.
6.6 Statics correction
CMP 重合では,反射波がほぼ(30)式の形で表されることを仮定している.しかし,地表

2014/5/26
- 12 -
付近の構造が場所によって大きく異なっている場合,反射走時が双曲線に乗らなくなる(図
13).この浅部構造の違いによる走時のゆらぎの補正を statics correction という.具体的には,
反射法 trace の初動部分を用いて,屈折法的に最浅部構造を求め,補正量を設定する.即ち,
この走時の揺らぎは最浅部の速度の遅い層(堆積層)の違いに起因する場合が多い.time-term
法と呼ばれる方法では,この補正量と堆積層の下の部分の屈折波速度を最小自乗法的に求
めるものである.
図 13 Statics correction の例.
6.7 Receiver Function
近年の高性能のデジタル地震観測網の発達によって,自然地震を用いた構造研究も盛ん
になってきた.ここでは,receiver function 法について紹介することにする.地下に明瞭な
速度境界(速度不連続面)があると,地震波は P 波から S 波,或いは S 波から P 波に変換
される.さらに,速度不連続面の間で多重反射を起こす.このような変換波・反射波は,
地震記録の中の直達 P 波の後に後続波(群)として観測される(図 14).
図 14. 入射 P 波と変換波 (After Sheaer (2009)).

2014/5/26
- 13 -
ある観測点で観測された地震波の 3 成分を Z(t),R(t),T(t)としよう.これらは,以下のよ
うに書き表すことができる.
( ) ( )* ( )* ( )
( ) ( )* ( )* ( )
( ) ( )* ( )* ( )
z
r
t
Z t S t I t E t
R t S t I t E t
T t S t I t E t
(31)
ここで,S(t)は震源時間函数である.I(t)は地震計の応答函数で 3 成分とも同一であると仮
定しよう.Ez(t),Er(t), Et(t)は,地下の応答函数である.(31)式は,それぞれの成分が 3 つ
の函数の時間領域での convolution の形で書かれている.従って,周波数領域では,これら
の Fourier 変換の積となる.ここで,Z(t),R(t)の Fourier 変換の比 H(を以下の様に定義し
よう.
( ) ( ) ( ) ( )( )
( )( ) ( ) ( ) ( ) ( )
r r
z z
S I E ERH
Z S I E E
(32)
このように,H(は,複雑な震源時間函数や地震計の応答函数によらない.この H(を
時間領域に戻したものを receiver function と呼ぶ.
水平多層構造を場合,遠地の地震はほぼ真下から(垂直に)入射するため,その Z 成分
は,P 波成分が卓越し,S 波成分の振幅は小さい.H(では,(で除しているため,S 波
成分が強調されることとなる.一般に,PS 変換波は,S 波速度に敏感なため,receiver function
H(t)は,S 波速度構造に強く支配される.水平多層構造の場合には,PS 変換波とその多重反
射がその伝搬経路と速度による時間遅れで出現することとなる(図 15).
図 15. 地震波形記録と Receiver Function (Shearer (2009)).

2014/5/26
- 14 -
上記のことを,簡単な例で示してみよう.簡単のため,P 波(振幅を Up,Wp)の後に PS
変換波と P 波の多重反射波が来ると考えよう.これらの後続波の,入射 P 波に対する相対
振幅を(up,wp)及び(ups,wps)としよう.この時,R(,(は,以下のように書ける.
( ) (1 )
( ) (1 )
p ps
p ps
i t i t
p p ps
i t i t
p p ps
R U u e u e
Z W w e w e
(33)
ここで,PS 変換波の Z 成分は小さい( 1psw )とすると,
( ) 1 psi tpps
p
UH u e
W (34)
これを,up,wp及び upsの一次の項のみを取って時間領域に戻すと,
( ) ( ) ( )pps ps
p
UH t t u t t
W (35)
となる.H(t)では,R 成分の波形から P 波多重反射が取り除かれていることがわかる.
Receiver Function 法は,その処理において,反射法のデータ処理と共通する部分が多い.
変換波は,一般に振幅が小さいために個々の地震波形記録から認識することは難しい.し
かし,多数の地震記録を重ね合わせる(stacking)ことによっ S/N 比を向上させることができ
る.
また,Receiver Function から得られる構造断面は時間断面である.反射法と同様に,
migration のテクニックを用いることで,時間断面から深さ断面に変換することができる.
図 16 及び図 17 に Receiver Function 解析による構造断面の例を示した.
図 16. Receiver Function 解析によるヒマラヤの地殻・上部マントル断面 (Schulte-Pelkum et al.
(2005)).

2014/5/26
- 15 -
Appendix
Kirchhoff の理論
Huygens の原理をより数学的の厳密に扱ったのは,Kirchhoff であった.彼の方法は,理論
地震記象の計算においても,また反射法における数学的なbackgroundとしても重要である.
以下では,スカラー波動函数を考える.
22
2 2
1
c t
(A-1)
の時間依存性を e-jt とすると, j t jkct( )e ( )e r r (A-2)
(A-2)式を(A-1)式に代入すると, に関する Helmholtz の方程式が得られる. 2 2k (A-3)
1と 2をその微分まで連続な一価函数としよう.ある閉局面 S において Green の定理
を用いると
2 2 1 22 1 1 2 2 1V S
( )dv ( )dSn n
(A-4)
1と 2 が(A-3)の Helmholtz の方程式を満足していれば,(A-4)式の左辺は零となり,
1 22 1S
( )dS 0n n
(A-5)
を得る.
ここで,S 内の一点 P における値を求めることを考える.
1
jkr
2
e
r
(A-6)
とする.但し,r は P からの距離とする.Green の定理を適用するため,図 A-1 のような閉
領域を考え,点 P における特異性を除くことにする.
図 A-1 Green の定理を適用する閉領域.

2014/5/26
- 16 -
点 P を囲む閉局面を球面にとる.この上での面積分は,
jkr jkr1 2
2 1
e e( )dS dS
n n r r r r
jkr jkr jkr
2
e e jkedS
r r r r
(A-7)
ここで,dS=r2dとすると
jkr jkr jkr
around Pre e rjk e d
r
(A-8)
更に,極限 r 0 を取ると, jkr
jkrP
jkrP
P
( e )d
e d
d since e 1 as r 0
4
(A-9)
S0
であることから
jkr jkr
P S
jkr jkrjkr
S
e e4 dS
r n n r
e 1 jk e re dS
r n n r r n
(A-10)
上式より
jkr jkrjkct jkr
P S
-jk(ct-r) jk( ct r )jk( ct r )
S
1 e 1 jk e re e dS
4 r n n r r n
1 e 1 jk e re dS
4 r n n r r n
(A-11)
更に変形して,
P t r / cSt r / c t r / c
1 1 1 1 rdS
4 r n n r cr n t
(A-12)
この式は,点 P における�(t),それを取り囲む閉局面 S 上の(t)の値のみから得ることがで
きる(全領域での(t)の値を知る必要はない).

2014/5/26
- 17 -
次に source から球面波が伝播していく場合を考えよう(図 A-2).
図 A-2 Source から dS を介して receiver に伝搬する場合.
球面波が source から伝搬するものとして,以下のようにおく.
00
00
1f ( t r / c )
r
1f '( t r / c )
t r
(A-13)
ここで,
00
00
rcos
nr
cosn
cosn r
(A-14)
2
1 r 1 1cos
n r n r r r
(A-15)
及び
0 0 020 0 0 0
1 1 1( f ( t r / c )) f ( t r / c ) f '( t r / c )
r r r cr
(A-16)
であることに注意して,(A-12)式から

2014/5/26
- 18 -
P 0 02 2S0 0
0 0S0 0
1 1 1cos cos f ( t r / c r / c )dS
4 rr r r
1 1 1cos cos f '( t r / c r / c )dS
4 crr crr
(A-17)
を得る.この式は,以下のような convolution の形に変形できる.
0P 02 2S
0 0
00S
0 0
r r1 1 1( t ) cos cos dS f ( t )
4 c rr r r
r r1 1 1( t ) cos cos dS f '( t )
4 c crr crr
(A-18)
ここで,r0,,r であるならば,far-filed 近似が成立し,(A18)式は,
0P 0S
0
r r1 1( t ) cos cos dS f '( t )
4 c c rr
(A-19)
となる.
図 A-3 のような反射波を扱う場合には,n
の符号が透過波に対して反転することを考慮
して
0 0P 0S
0
r r R( )1( t ) cos cos dS f '( t )
4 c c rr
(A-20)
ここで, 0R( ) は反射係数であり,平面波の場合として計算することがある(Kirchhoff
physical optics).
図 A3. 反射波の場合.
もし,zero-offset の場合は, 0 ,r0=r として,
0P 2S
R( )1 2r( t ) cos dS f '( t )
2 c c r
(A-21)
を得る.