5/15/2002 - 1 modeling and controlling the caltech ducted fan vehicle steve neuendorffer ee290n...
Post on 20-Dec-2015
214 views
TRANSCRIPT
5/15/2002 - 1
Modeling and controlling the Caltech Ducted Fan Vehicle
Steve NeuendorfferEE290N Final Presentation
5/15/2002 - 2
How do we get to an implementation?
Abstract, high-level system model
Detailed low-level system implementation
5/15/2002 - 3
Some options…1. Don't build a high-level model…
Implement the system by hand.
2. Build a high-level model, but throw it away when implementation starts.
3. Build a high-level model, and validate implementation against it.
4. Build a low-level model, and generate an implementation from it.
5. Build a high-level model, refine it gradually into more detailed models that are more suitable for automatic code generation.
5/15/2002 - 4
An example of heterogenous refinement
Drive the ducted fan vehicle to a desired point.
• Continuous time vehicle and controller.• A zero-delay discrete-time controller.• A one-step delay discrete-time controller.• An arbitrary delay discrete-time controller.• A more sophisticated modal controller.• A model for automatic system
implementation.
5/15/2002 - 5
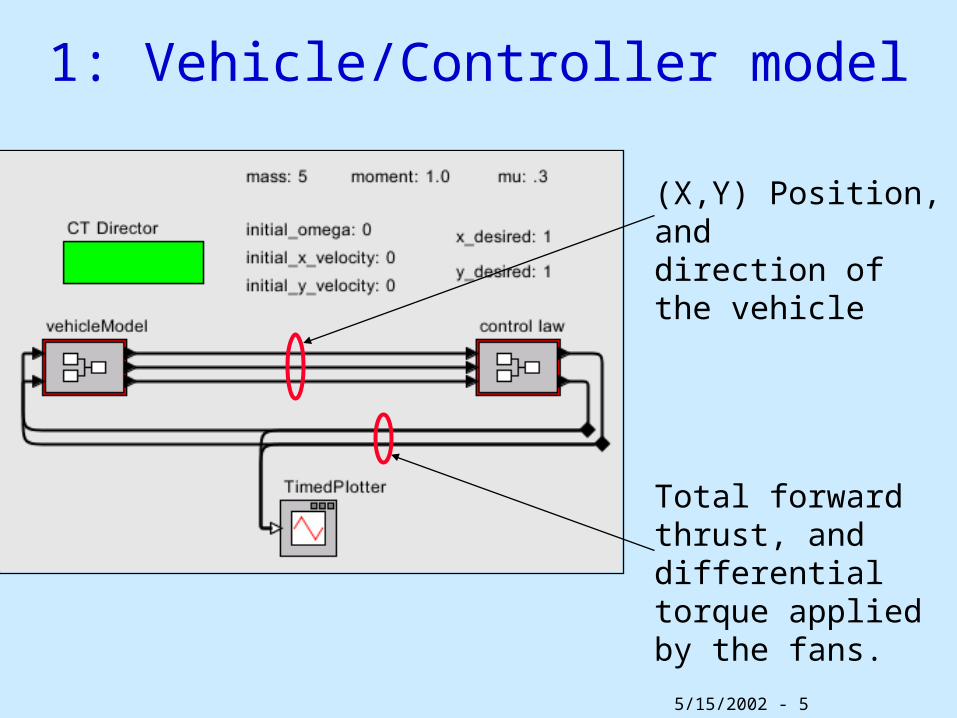
1: Vehicle/Controller model
(X,Y) Position, anddirection of the vehicle
Total forward thrust, and differential torque applied by the fans.
5/15/2002 - 6
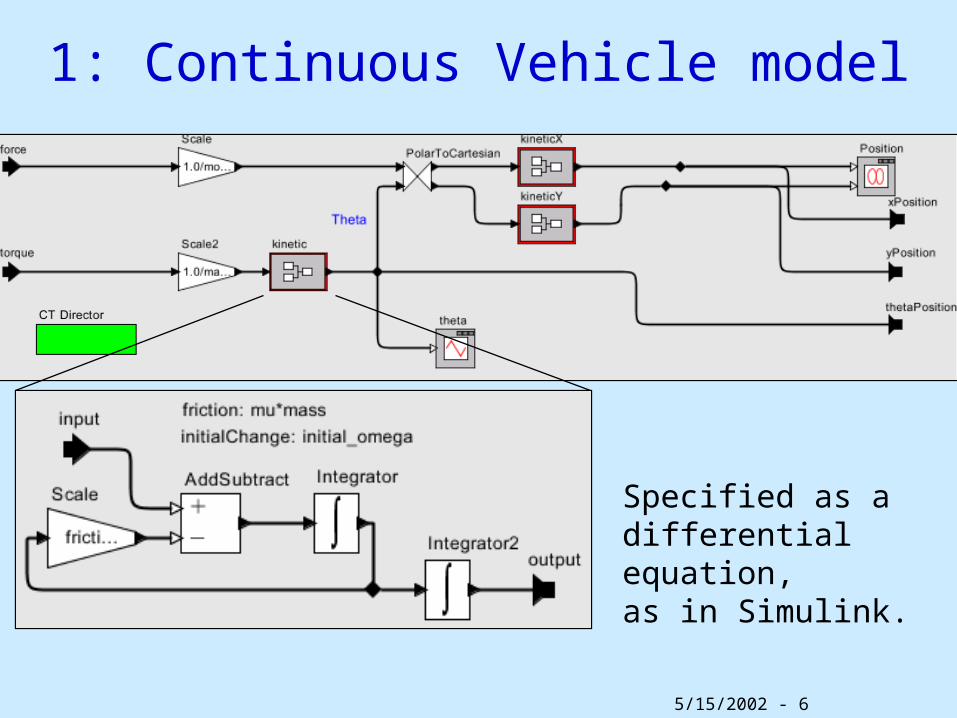
1: Continuous Vehicle model
Specified as a differential equation,as in Simulink.

5/15/2002 - 7
1: Continuous controller model
A modified proportional controller…

5/15/2002 - 8
2: Vehicle model withDiscrete-time interface
Zero-order holdmodels the Digital -> Analog conversion.
The analog position of the vehicle is periodically sampled approximately every second.
5/15/2002 - 9
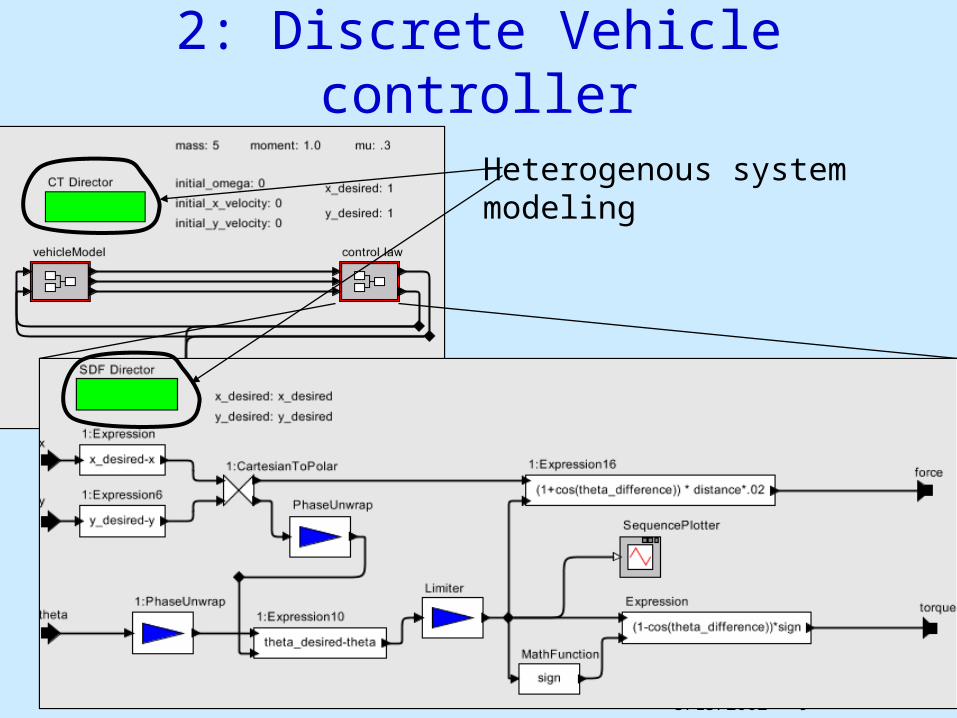
2: Discrete Vehicle controller
Heterogenous systemmodeling

5/15/2002 - 10
3: Discrete Vehicle controller with one-sample delay
SampleDelay added to modelcomputation time of controller

5/15/2002 - 11
4: Discrete Vehicle controller with arbitrary delay
More Heterogeneity
TimedDelay actor in Discrete Event domain models arbitrary delay.
SDF control lawCT vehicle model

5/15/2002 - 12
5: A modal controllerYet More Heterogeneity
5/15/2002 - 13
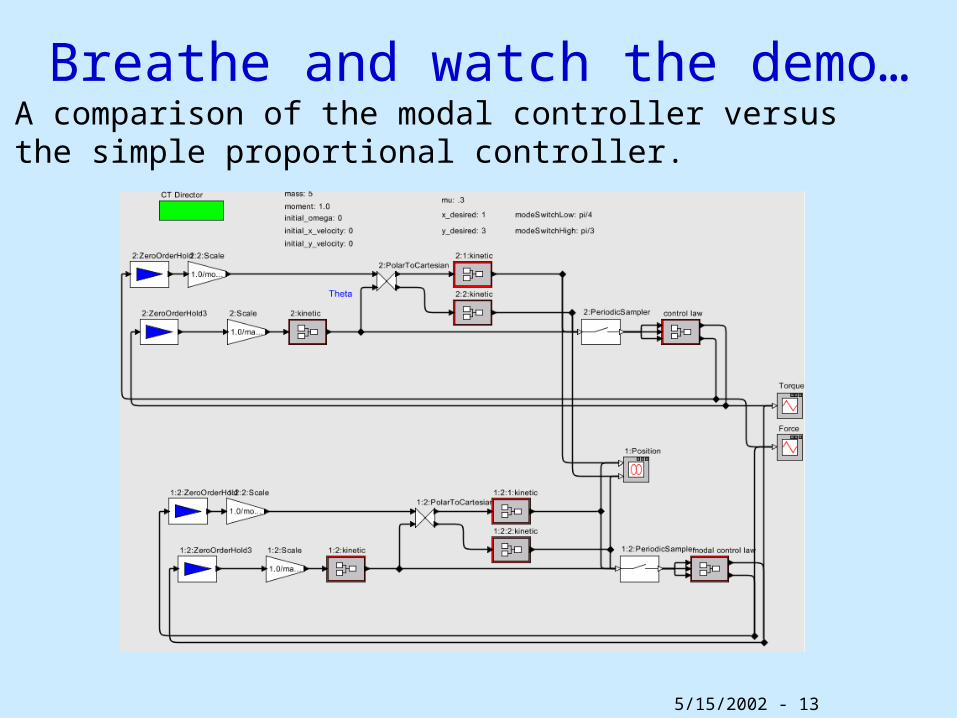
Breathe and watch the demo…A comparison of the modal controller versusthe simple proportional controller.

5/15/2002 - 14
Target specifics…
(X,Y) Position, anddirection of the vehicle come from video localization system.
Control values are sent to motor controller by serial port.

5/15/2002 - 15
6: A controller, with refined communication.
Suitable for code generation
One of the previous (possibly heterogenous)control laws

5/15/2002 - 16
Conclusion
I used Ptolemy II to model a physical control system at an high-level of granularity using an abstract model of computation.
The high level model was manually refined through several intermediate steps to the point where the model was detailed enough to automatically generate the controller code.