5. refraction seismology
TRANSCRIPT
2014/5/26
- 1-
5. Refraction Seismology
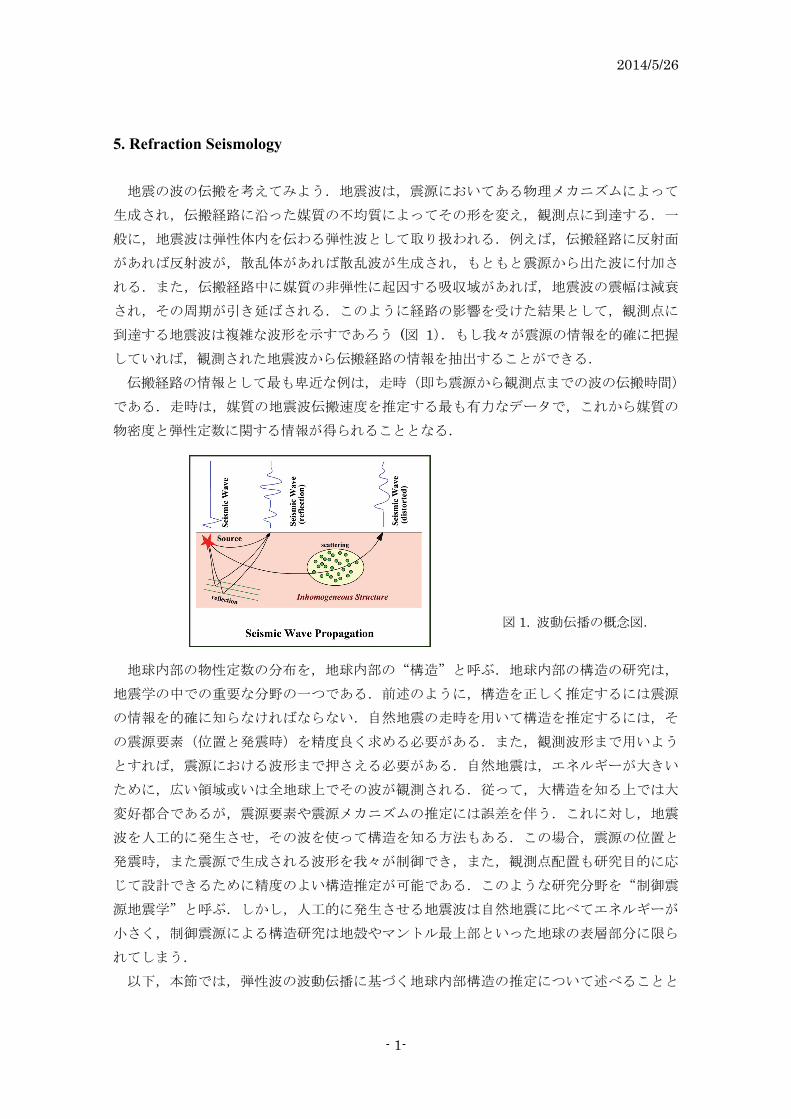
地震の波の伝搬を考えてみよう.地震波は,震源においてある物理メカニズムによって
生成され,伝搬経路に沿った媒質の不均質によってその形を変え,観測点に到達する.一
般に,地震波は弾性体内を伝わる弾性波として取り扱われる.例えば,伝搬経路に反射面
があれば反射波が,散乱体があれば散乱波が生成され,もともと震源から出た波に付加さ
れる.また,伝搬経路中に媒質の非弾性に起因する吸収域があれば,地震波の震幅は減衰
され,その周期が引き延ばされる.このように経路の影響を受けた結果として,観測点に
到達する地震波は複雑な波形を示すであろう (図 1).もし我々が震源の情報を的確に把握
していれば,観測された地震波から伝搬経路の情報を抽出することができる.
伝搬経路の情報として最も卑近な例は,走時(即ち震源から観測点までの波の伝搬時間)
である.走時は,媒質の地震波伝搬速度を推定する最も有力なデータで,これから媒質の
物密度と弾性定数に関する情報が得られることとなる.
図 1. 波動伝播の概念図.
地球内部の物性定数の分布を,地球内部の“構造”と呼ぶ.地球内部の構造の研究は,
地震学の中での重要な分野の一つである.前述のように,構造を正しく推定するには震源
の情報を的確に知らなければならない.自然地震の走時を用いて構造を推定するには,そ
の震源要素(位置と発震時)を精度良く求める必要がある.また,観測波形まで用いよう
とすれば,震源における波形まで押さえる必要がある.自然地震は,エネルギーが大きい
ために,広い領域或いは全地球上でその波が観測される.従って,大構造を知る上では大
変好都合であるが,震源要素や震源メカニズムの推定には誤差を伴う.これに対し,地震
波を人工的に発生させ,その波を使って構造を知る方法もある.この場合,震源の位置と
発震時,また震源で生成される波形を我々が制御でき,また,観測点配置も研究目的に応
じて設計できるために精度のよい構造推定が可能である.このような研究分野を“制御震
源地震学”と呼ぶ.しかし,人工的に発生させる地震波は自然地震に比べてエネルギーが
小さく,制御震源による構造研究は地殻やマントル最上部といった地球の表層部分に限ら
れてしまう.
以下,本節では,弾性波の波動伝播に基づく地球内部構造の推定について述べることと

2014/5/26
- 2-
する.以下では,主として制御震源地震学的な構造推定を解説するが,その内容の多くは,
自然地震を用いた構造研究にも共通するものである.
5.1 Mohorovicic の先駆的研究
地震波走時を用いた地球内部構造の研究として,Mohorovicic(1910)の先駆的な業績を紹介
しよう.彼は,1909 年に発生したバルカン半島の地震及びその余震を観測することによっ
て,図.2 のような走時データを得た.このデータによれば,P 波の初動走時は,2 つの分枝
上に乗っていることがわかる.彼は分枝Pを震源から直接観測点に到達する波(直達波),
分枝 P を震源から下部に向けて伝搬し,地下の高速度層で屈折して水平に伝わって最後に
上方に伝搬して観測点に達した波と解釈した.彼の計算では,地球の最表層部分の P 波速
度が 5.6km/s で,地表から 50km の深さに速度が 7.7km/s の層が存在することがわかった.
この最表層部分は地殻,高速度層部分はマントルと呼ばれ,彼の推定は,現在わかってい
る地殻・マントルの速度(5.5-7km/s 及び 7.8-8.2km/s)と比べても驚くほど正確である.彼
の業績に敬意を表し,地殻とマントルの境界面を Mohorovicic の不連続面(Moho 面)と呼
ぶ.
図 2. Mohorovicic の得た走時曲線とその解釈.
5.2 反射・屈折の法則と Slope-Intercept Time 法
Mohorovicic の手法は,地震波の屈折の法則を適用したものであり,現在制御地震探査で
用いられる屈折法とよばれる構造推定方法の基本となるものである.
図.3 のように,速度の異なる媒質が接しているとする.媒質 I から波が入射すると,境界
面で反射・屈折が起きる.境界面に立てた法線と入射角の成す角度を入射角という.反射
波と法線の成す角度は,入射角と同じである.一方,媒質 II に伝搬する波(屈折波)と法

2014/5/26
- 3-
線の成す角度(射出角)は,入射角と以下のような関係がある.
図 3 速度境界面における反射と屈折.
1 1 2 2sin i / v sin i / v (1)
これを Snell の法則という.
5.2.1 Slope-Intercept Time 法の基本(水平 2 層構造モデル)
簡単の為,図.4 のように震源を地表に置く.制御震源を想定した場合,震源として爆薬
やエアガン等を用いるので”shot”と呼ぶことが多い.構造としては,2 層構造(それぞれの
速度を v1 と v2),表層の厚さを H1 とする.このような構造のもとで,伝搬経路の違いによ
って 3 種類の波が存在する.第 1 の波は,震源から表層を通って観測点に直接到達する波
(直達波)で,その走時 T1 は,震源と観測点の距離(震央距離)x の函数として以下のよ
うに書ける.
図 4 2 層構造における直達波・屈折波・反射波と走時曲線.

2014/5/26
- 4-
1 1( ) / .T x x v (2)
第 2 の波は,第 2 層を通る屈折波で,その走時 T2は,
2 2 20( ) /T x x v T , (3)
と表される.ここで,T20は,原点走時(intercept time)と呼ばれるもので,以下のように書
ける.
2 2 1/ 220 1 1 2 12 (1- / ) /T H v v v . (4)
更に,この場合の速度境界への入射角 icは,(1)式で i2=/2 とおいた場合に相当する.即ち,
-11 2sin ( / )ci v v �(5)
となる.この 2 層モデルによれば,初動の走時データは,図 4 の下段に示すように T1と T2
上に並ぶこととなる.従って,まず第 1 層の速度 v1を決定するには T1の傾き(slope)を測
定すればよい.更に,第 2 層目の速度 v2は T2の傾きから求まる.最後に第 1 層の厚さ H1
は,intercept time T20を測定し,slope の測定から求められた v1と v2を代入することで求めら
れる.この方法は,slope-intercept time 法と呼ばれ,Mohorovicic が用いた方法である.
第 3 の波は,境界面での反射波であり,その走時 T1(r)は,
( ) 2 2 1/ 21 1 1( ) 2( / 4) /rT x H x v (6)
となる.ここで,屈折波の現れる距離 xc (2 2 1/ 2
1 1 2 12 tan 2 /( / 1)cH i H v v )を critical distance
と言う.この critical distance を超えた領域に現れる反射波は post-critical reflection と呼ばれ
る.これは,広角反射波(wide-angle reflection)とほぼ同義語でエネルギーが大きく,通常
の屈折法構造探査でもしばしば観測される.従って,屈折波と広角反射波の両方を用いて
その解析を行うことが多い.その為に単に屈折法ではなく,屈折・広角反射法
(refraction/wide-angle reflection method)と呼ぶ方が普通である.一方,critical distance 以内の
反射波を pre-critical reflection と言い,後述の反射法探査と呼ばれる探査手法では,主にこの
波を使って地下構造を mapping する.
5.2.2 水平多層構造
図 4 では,2 層構造を考えたが,水平多層構造の場合にも簡単に拡張できる(図 5).この
場合,第 n 層からの屈折波走時 Tnは,以下のように書き表せる.
0( ) /n n nT x x v T . (7)
この式の中の intercept time Tn0は, 1
2 2 1/ 20
1
2 (1 / ) /n
n j j n jj
T H v v v
(8)

2014/5/26
- 5-
と書ける.多層構造の場合の走時を,図.5 の下段に示した.多層構造モデルにおける構造
推定も,2 層モデルの場合と同様にできる.即ち,T1の slope, T2の slope と intercept time と
浅い部分の層から深い方の層へ順に測定し,それぞれの層の速度と厚さを求めていけばよ
い.
図 5 水平多層構造の場合の屈折波と走
時曲線.
12 2 1/ 2
01
2 (1 / ) /n
n j j n jj
T H v v v
(8)
と書ける.多層構造の場合の走時を,図.5 の下段に示した.多層構造モデルにおける構造
推定も,2 層モデルの場合と同様にできる.即ち,T1の slope, T2の slope と intercept time と
浅い部分の層から深い方の層へ順に測定し,それぞれの層の速度と厚さを求めていけばよ
い.
第 n 番目の境界(第 n 層と第 n+1 層の境界)からの反射波の走時の表現式を導こう.見
通しをよくするために(6)式を以下のように書き直す.
( ) 2 2 2 21 1 1 1( ( )) (2 / ) /rT x H v x v . (9)
第 n 境界からの反射波も(9)式に似た形に近似できるとして,以下のようにおく.
( ) 2 ( ) 2 2 20( ( )) ( ) /r r
n n nT x T x V . (10)
( )0r
nT 及び2
nV は,以下のように書き表せる.
( )0
1 1
2 / 2n n
rn j j j
j j
T H v t
, (11)

2014/5/26
- 6-
2 2
1 1 1 1
2 / / 2 /n n n n
n j j j j j j jj j j j
V v H H v v t t
. (12)
ここで,
/j j jt H v . (13)
実際の反射波走時を,(11)式と(12)式に fitting することを考える.つまり,( )0r
nT 及び2
nV をデ
ータから求める.これらの値を順次使って,各層の速度と厚さ n̂V と ˆnH を
2 ( ) 2 ( ) 2 ( ) ( )1 0 ( 1)0 1 0 ( 1)0
ˆ ( ) /( )r r r rn n n n n n nV T V T V T T , (14)
( ) 2 ( ) 20 ( 1)0 1
ˆ ˆ( ) / 2r rn n n n n nH T V T V V . (15)
ここで, nV と n̂V を RMS velocity 及び interval velocity (区間速度)を呼ぶ.
5.2.3 傾斜構造
最後に,図 6 のように層境界に傾斜のある場合を考えよう.
図 6 傾斜 2 層構造における屈折波と走時曲線.
まず,図 6 左上段のように,点 A に shot が,点 B に receiver のある場合,その直達波と
屈折波走時 TA0及び TA1は,
0 1( ) /AT x x v , (16)

2014/5/26
- 7-
1 10( ) / AA AT x x v T , (17)
となる.ここで,
1 / sin( )A cv v i ,2 2 1/ 2
10 1 22 (1 / )AAT H v v (18)
である.しかし,この場合の構造を記述するパラメータは,v1,v2,HA 及び HB(或いは)で,
TA0及び TA1の slope と TA1の intercept time の 3 つの情報からだけでは決定できない(図 6
右).しかし,点 B に shot が,点 A に receiver を置いた場合のデータがあれば,一義的に
決めることができる(図 6 左下段).ここで,図 6 左下段の観測形態を,上段に対する逆測線
(reverse profile)という.その直達波と屈折波走時 TB0及び TB1は,
0 1( ) /BT x x v , (19)
1 10( ) / BB BT x x v T , (20)
となる.ここで,
1 / sin( )B cv v i ,2 2 1/ 2
10 1 2 12 (1 / ) /BBT H v v v . (21)
TA0或いは TB0の slope から v1が求まる.更に,TA1及び TB1の slope から,icとを求め,v1
の値を用いて v2を決定する.もし,傾斜が小さい(<<1)とすると,
21/ (1/ 1/ ) / 2A Bv v v (22)
という近似が成立する.即ち,TA1と TB1の“見かけ”の傾きの平均値が,真の速度(v2)
の逆数となる.また,vAや vBを apparent velocity (見かけ速度)と呼ぶ.HA或いは HBは,そ
れぞれ intercept time 10AT , 10
BT から求めればよい.
5.3 走時の計算(波線追跡法(Ray tracing))
前節では,水平多層構造の場合の屈折波と反射波の走時の一般式を導いた.しかし,実
際の地球内部の構造は遙かに複雑で,水平多層の近似が成り立つ場合の方がむしろ稀であ
る.地震波速度が場所の函数である場合,第 5 章で述べた波線追跡法(ray tracing)が極め
て有効で広く用いられている.
図 7 のような座標系において,L に沿って A から B に伝わる波の走時 T は,
/L
T ds v (23)
と書ける.Fermat の原理によれば,実際に実現する波線経路では,T に停留値を与える波

2014/5/26
- 8-
線経路が,実際の経路.このような波線を決めることは,変分法の問題に他ならない.波
線を決定する微分方程式は,Euler の方程式で与えられる.即ち,
図 7 波線追跡法の座標系と波線.
1 1d d
ds v ds v
r. (24)
通常は,v を場所の函数として与え,(24)式を数値的に解く.
5.4 理論地震記象の計算
今までは走時を扱ってきた.しかし,観測される地震波には,走時の他に波形にも重要
な情報が含まれている.従って,走時だけでなく波形データをも用いることによって,構
造決定の信頼性を高めることができる.主な方法として,高周波近似(asymptotic ray theory)
に基づく波形計算と reflectivity 法を挙げることができる.前者については,既に第 6 章で説
明した.一方,reflectivity 法については,多層構造における反射・透過係数の計算について
は第 5 章で述べたので,これに基づく波形計算方法を中心に,以下で説明する.
5.4.1 Reflectivity 法
図 8 のような円筒座標系を採用し,水平多層構造を考える.各層は,それぞれ等方均質
媒質であると仮定する(密度i,P 波及び S 波速度,i及びi).等方均質媒質における運動
方程式を解くために,以下に示す変位ポテンシャルを用いる.
0
0 0
q
grad rot rot
w
u , (25)
即ち,

2014/5/26
- 9-
2 2
2
1, q w
r r z z r r r
. (26)
図8 Reflectivity法の座標 系と層構造.
と は,以下の波動方程式を満たす.
2 22 2
2 2 2 2
1 1,
t t
. (28)
ここで新しいポテンシャル =- / r を導入する.更に Fourier 変換を次のように定義し
ておく.
1exp( ) , exp( )
2j t dt j t d
. (29)
次に source function を等方的(explosion 型)と仮定する.原点に source を置くと,その変位
ポテンシャルは,
00
( ) exp( ) /
( ) ( ) exp( ) /
s L jk R R
L J kr j z j kdk
(30)
ここで,
2 2 1/ 2, ( )k R r z
(31)
及び
2 2 2k k . (32)
尚,(30)式は球面波が円筒波の重ね合わせで表せることを示している.これを Sommerfeld’s
integral という.震源が J0(kr)であることから,
' '0 0 1( ) , ( ) , ( )j z j z j zJ kr e J kr e J kr e (33)

2014/5/26
- 10-
となる.但し,
2 2 2' k k . (34)
原点に source を置いた多層構造を考える.第 0 番目の層境界が z=h にあるとしよう(即ち
z0=h).第 i 層における解は,
( ) ( )0 00 0
0 0
' ( ) ' ( )1 10 0
0 0
( ) ( ) ( ) ( ) ,
( ) ( ) ( ) ( )
i i i i
i i i i
j z z j z zi i i
j z z j z zi i i
kdk kdkL Ae J kr L B e J kr
j j
kdk kdkL C e J kr L D e J kr
(35)
と書くことができる.ここで
2 2 2 2
2 2 2 2
for for , '
for for
i i
i i
i i
i i
i i
k k c k k c
j k k c j k k c
(36)
及び
/ , / , /i iic k k k . (37)
次に,
exp[ ( )], exp[ ( )],
exp[ ' ( )], exp[ ' ( )]
i i i i i i i i
i i i i i i i i
A j z z B j z z
C j z z D j z z
(38)
とおき,
000
100
( , , ) ( ) ( ) ( ) ,
( , , ) ( ) ( ) ( )
i i i
i i i
kdkr z L J kr
j
kdkr z L J kr
(39)
と書き直す.ここで,変位と応力を以下のように書き表す.
1 00 00 0
0 10 00 0
( ) ( ) , ( ) ( ) ,
( ) ( ) , ( ) ( ) .
i i i i
zz zzi zr zrii i
kdk kdkq L Q J kr w L W J kr
j
kdk kdkP L P J kr P L P J kr
j
(40)
第 i 層において,displacement-stress vector 及び potential vector を定義する.
i
ii
zzi
zri
Q
W
P
P
S ,
i
ii
i
i
Φ . (41)

2014/5/26
- 11-
iS と iΦ は,matrix iT で下記のように結びつけられる.
1 or i i i i i i S TΦ Φ T S . (42)
また,z=zi と z=zi-1の potenntail vector は,matrix iE で結びつけられる.
1( ) ( )i i i i iz z Φ EΦ .
ここで,matrix iT と iE は,Appendix に示した.
次に,境界条件を考える.第 i 番目の層境界において,displacement-stress vector が連続で
なければならない.即ち,
1( ) ( ) ( 0,1 )i i i iz z i n S S . (43)
これを浅い方から深い方向へ順に用いると,
1 0 0
1 11 1 1 1 0 0
1 11 1 1 1 1 1 1 1 1 0 0
1 11 1 1 1 1 0 0 1 0 0
(0) (0),
(0) (0) (0).
( ) (0) (0) (0).
( ) ( ) (0) (0).
z
z
S T Φ
Φ T S T T Φ
Φ E Φ E T S E T T Φ
S T E T T Φ G T Φ
上記の過程を切り返し,第 i 層の displacement-stress vector ( )i izS は, 0 (0)Φ を用いて以下
のように書くことができる.
1 1 0 0( ) (0)i i i iz S G G G T Φ . (44)
但し,
1 1i i i i
G T E T . (45)
ここで,matrix Giの成分は Appendix に定義してある.更に,一番下の半無限媒質上面での
displacement-stress vector 1( )n nz S は,以下のように表せる.
1 1 1 1 2 1 0 0( ) ( ) (0)n n n n n nz z S S G G G T Φ . (46)
これから,最上層と最下層の potential vector の関係式は,
1 0( ) (0)n nz Φ M Φ . (47)
ここで,
11 2 1 0n n n
M T G G G T (48)
最上層から P 波が入射する場合,
+0 0( ) exp( )z j h . (49)
従って

2014/5/26
- 12-
0 0
0 0
0
exp[ ]
exp[ ' ]( )
exp[- ]
0
A jh
C jhh
jh
0Φ . (50)
一方,最も下の半無限媒質内では,放射条件(無限遠方から入射してくる波は無い)が満
たされなければならない.即ち,
0n n . (51)
従って,z=zi-1で,
1
0
0( )n n
n
n
zB
D
Φ . (52)
ここで,多層構造中の反射係数と透過係数を導入する.
0 0
0 0 0
0
0
exp[ 2 ],
exp[ ( ' ) ],
exp[ ],
exp[ ],
pp
ps
n pp
n ps
A R j h
C R j h
B T jh
D T jh
(53)
と置くと,
0(0) exp[- ] ,1
0
pp
ps
R
Rjh
0Φ
(54)
及び
1 0
0
0( ) exp[- ]n n
pp
ps
z jhT
T
Φ
(55)
となる.今,

2014/5/26
- 13-
11 12
21 22
M MM
M M (56)
と書くと,
111 12
121 11 12 22
1 ,
0
1
0
pp
ps
pp
ps
R
R
T
T
M M
M M M M
(57)
となる.Mの要素を用いると,
12 23 22 13 21 13 11 23
11 22 12 21 11 22 12 21
31 32 33 41 42 43
, .
,
pp ps
pp pp ps ps pp ps
m m m m m m m mR R
m m m m m m m m
T m R m R m T m R m R m
(58)
となる.PP 反射及び PS 反射に対応する potential は,
0 ( 2 )0 00
0
( ) ( )j z hpp
kdkL R e J kr
j
, 0 0' ( )
0 100
( ) ( )j z h j hps
kdkL R e J kr
(59)
となる.
もし, / 2 /h f が成立していれば,積分範囲を
0 0
0
0 0
( 2 )0 00
0
/ 2 cos ( 2 )
00
( ) ( )
( ) ( , ) ( sin ) sin
k j z hpp
jk z h
pp
kdkL R e J kr
j
dL R J rk e k
j
(60)
とすることができよう.更に,kr>>1 とすると,
0 ( ) 1/ 2 exp[ ( / 4)] exp[ ( / 4)J kr kr j kr j kr (61)
という漸近形を用いて, 0 ( , , )r z を
0
0
0
0
0
0
/ 2 [ ( sin ( 2 )cos ]4
0 0
/ 2 [ ( sin ( 2 )cos ]4
0
( , , ) ( ) sin2 sin
+ ( ) sin2 sin
j k r z hpp
j k r z hpp
R dr z L e k
jrk
R dL e k
jrk
(62)
と書くことができる.この積分は,stationary phase 法を用いて評価できる.
0
( ) sin ( 2 ) cosf r z h k (63)
と置き,で '( )f =0,即ち stationary phase となる.

2014/5/26
- 14-
00 0'( ) cos ( 2 ) sin 0f r z h k . (64)
0 arctan2
r
h z
(65)
従って,
0 0 0 0''( ) sin ( 2 ) cos ( )f r z h f (66)
となる.z<h であると,(62)式の第 2 項のみが stationary phase を持つ.即ち
2
00 0
0 0
4 ( )0 ( ) 20 0
0 ( )0
0
sin( , , ) ( ) ( , )
2
sin ( ) ( , )
( )
jj fj f
pp
j fpp
ker z L R e e d
j r
kL R e
r f
(67)
ここで,
0 0
2 2 00 1
1
sin 1( ) (2 ) , f k r h z R k
r R (68)
に注意して,最終的に
100 0
1
1( , , ) ( ) ( , )
jk R
ppr z L R eR
(69)
を得る.
5.5 屈折法のデータ解析
実際の屈折法データ解析では,まず,走時データを解析することによって速度構造モデ
ルを作る.そのモデルをもとに理論波形を計算して実際の観測波形をよく説明かどうかを
確かめる.もし,理論波形と観測波形に不一致があればモデルを修正するが,走時と波形
の両方を説明することが必要であるので,走時解析から再びやり直すこととなる.また,
重力データがあれば,モデルを拘束する重要な情報となる.地震波形データと重力データ
は相補的なところがあり,両者を併用することによって,モデルの信頼性が向上する.解
析の流れは,図 9 のようになるであろう.
5.5.1 走時データ解析
データ解析には,試行錯誤的方法(forward modeling)と inversion 的方法がある.思考錯
誤的な方法では,まずは slope-intercept time 法などの簡便な方法で最上部構造を推定し,そ
の後に波線追跡法を用いてモデルを精緻化する.ここで,slope-intercept time 法を振り返っ

2014/5/26
- 15-
てみよう.この場合,走時曲線の傾きが速度の逆数となる(式(7)).傾きの測定は 1 回で済
むので,その決定精度は高い.一方,層の厚さは式(8)に示されるように,intercept time を測
定し,その直前までの過程で得られた全ての推定値を用いなければならない.例えば Tn0か
ら第 n-1 層の厚さ Hn-1を求めるには,vn-1,vnだけでなく,n-2 層までの全ての層の速度と厚さ
(vk,Hk, k=1,..,n-2)の全てを用いる.従って,Hn-1には各推定値の誤差が蓄積されてしまう.
一般的に,屈折法においては,速度推定の信頼性は,その形状の推定に比べて高いと言え
る.また,最上部構造の推定には,inversion 的アプローチ(例えば time-term 法)を用いる
のも有効である.
波線追跡法で構築されるモデルは一般に複雑になり,そのモデルを記述するパラメータ
(model parameters)が極めて多い.試行錯誤的に多数のパラメータを求めた場合,個々の
パラメータのデータ依存性,不確定さ等を定量的に見積もることは困難である.従って,
得られた解の信頼度の評価が難しくなる.
図 9 屈折法データ解析の流れ.
近年の屈折法探査では多点ショットと高密度観測点を設置するため,大量の走時データ
が得られるようになった.従って,モデルパラメータを inversion 的に求めることが可能と
なった.このアプローチには 2 通りある.第 1 の方法は,モデルパラメータを各層の速度
(一定でなくてもよい)とその形状(例えば速度境界の位置)とし,そのパラメータに関
する走時の微係数を求めることで,inversion の係数行列を構築する.この行列から最小自乗
法的にモデルパラメータを求める.第 2 の方法は,tomography を用いるものである.この
場合,モデルを幾つかの cell に分け,各 cell 内の速度を定義する.この cell 内の速度を未知
数として走時データから求めるのである.
このような inversion の核となるのは,走時データの計算である.inversion でモデルパラ
メータを求めていくと,その速度構造は複雑になる.波線追跡法は高周波近似であるため
に構造の微小な変化に敏感に反応し,計算が不安定になる場合がある.特に tomography で

2014/5/26
- 16-
は,このような状況が顕著であり,より安定な走時計算が必要である.その為,波線追跡
法より波面法を用いる場合が多い.
5.5.2 振幅・波形データ解析
Asymptotic ray theory による振幅計算は,手法的に波線追跡法の延長上にあるので,大変
よく用いられる.この計算は,一つ一つの屈折波・反射波に対して実施する.第 5 章で示
したように,振幅は geometrical spreading と速度境界における反射・透過係数に依存する.
従って,振幅は,モデルの速度よりも速度勾配に敏感である.また,振幅データから,速
度境界の速度差を求めることも可能である.これらの情報は,走時データからは求めにく
いものである.走時・振幅データの両方を用いた解析の重要性は,まさにこの点にある.
しかし,asymptotic ray theory は,高周波近似であり,第 5 章で展開した議論では,1/ωの 0
次の項しか考慮しなかった.従って,例えば caustic や critical point 付近の波形を計算するこ
とはできない.また,厳密な意味での多重反射を取り扱うことはできない.asymptotic ray
theory は,複雑な構造においても適応可能であるが,このような“限界”のあることは,十分
注意することが必要である.
Reflectivity 法は,波動方程式の厳密解をもと定式化されている.従って,水平多層的な構
造の場合には,振幅ではなく“波形”を計算できるという大きな利点がある.しかし,高周波
側の計算では,layer matrix (Ek,Tk,Gk)に overflow や underflow が発生する場合がある.また,
波数積分の範囲をどこまでに設定するか,どのように実施するか(どのような積分路を取
るか)については,多くの研究がなされてきたところである.
近年の計算機環境の飛躍的な向上により,複雑な構造についても運動方程式を差分法や
有限要素法等を用いて数値的に直接解くことが可能となってきた.通常の構造探査で対象
とする周波数帯域は,1-20Hz 程度である.反射法探査では,30-40Hz までであろう.問題
は,どれだけ高周波側まで計算できるかということである.

2014/5/26
- 17-
Appendix

2014/5/26
- 18-