4조_sociallyinteractiverobots_.ppt
TRANSCRIPT

Human Robot Interaction
A Survey of socially interactive robotsA Survey of socially interactive robots
Ansi (Sang-ik An)Ansi (Sang-ik An) Bear (Geonhyeok Go)Bear (Geonhyeok Go) SJ (Sujung Han)SJ (Sujung Han) HARI (Hari Sankar)HARI (Hari Sankar) BK (Byoungkil Han)BK (Byoungkil Han)
44thth Team Team

Human Robot InteractionHuman Robot Interaction
Contents
IntroductionCH1CH1
MethodologyCH2CH2
1.1. The history of social robots
1.2. Social robots and social embeddedness: concepts and definitions
1.3. The history of social robots
1.4. Why socially interactive robots?
2.1. Design approaches
2.2. Design issues
2.3. Embodiment
2.4. Emotion

Human Robot Interaction
Chapter1. IntroductionChapter1. Introduction
44thth Team Team

Human Robot InteractionHuman Robot Interaction
1.1. The history of social robots
Individual social robots vs. Group social collective robots

Human Robot InteractionHuman Robot Interaction
1.1. The history of social robots
Biologically inspired robots -> Possibility of interaction robot & environment
robot & robot
Walter’s robotic tortoises, Elmer and Elsie (late 1940s) : No explicit communication or mutual recognition

Human Robot InteractionHuman Robot Interaction
1.1. The history of social robots
Group-oriented social robots Collective or swarm robot behavior Ant-like robots(early 1990s) Multi-robot or distributed robotic systems Maximizing benefit through collective action Behavior inspired by social insect societies Societies : anonymous, homogeneous groups
Individuals do not matter
Sentinel, Matrix Khepera robots foraging for “food”

Human Robot InteractionHuman Robot Interaction
1.1. The history of social robots
Individual social robots Individualized societies(Individual matters) :
mammals Individuals live in groups,
form relationships and social networks, create alliances
Stick to societal norms and conventions
Early “individual” social robots: “getting to know each other” (left) and learning by imitation (right)
Human Robot InteractionHuman Robot Interaction
1.1. The history of social robots
Social robots Embodied agents that are part of a heterogeneous group Recognize each other Engage in social interactions Possess histories Explicitly communicate with and learn from each other
Proposed by “Dautenhahan” and “Billiard”

Human Robot InteractionHuman Robot Interaction
4 classes of social robots(by Breazeal) + 3 classes added
1. Socially evocative Human-like, anthropomorphic
2. Social interface Natural interface by human-like social
cues and communication modalities
3. Socially receptive Learning from interaction
4. Sociable Pro-actively engaging with humans in order to satisfy internal
social aims
Sparky
1.2. Social robots and social embeddedness : concepts and definitions

Human Robot InteractionHuman Robot Interaction
1.2. Social robots and social embeddedness : concepts and definitions
4 classes of social robots(by Breazeal) + 3 classes added
4. Socially situated Distinguish between other social agents and various
objects in the environments
5. Socially embedded Structurally coupled with social
environment Partially aware of human interactional
structures
6. Socially intelligent Human style social intelligence
R2-D2 and C-3PO from Star Wars

Human Robot InteractionHuman Robot Interaction
1.3. Socially Interactive Robots (1/4)
Focus on peer-to-peer HRI Robots with “human social” characteristics :
emotion, dialogue, relationship, natural communication, personality, and learning
From B.J. Fogg, Persuasive Technology : Using Computers to Change What We Think and Do

Human Robot InteractionHuman Robot Interaction
1.3. Socially Interactive Robots (2/4)
Focus on peer-to-peer HRI common assumption : “humans prefer to interact
with machines in the same way that they interact with real people”
When your computer doesn’t work…
Human Robot InteractionHuman Robot Interaction
1.3. Socially Interactive Robots (3/4)
Robot as partners, peers or assistants adaptability and flexibility with a wide range of humans Used as research platforms, as toys, as educational
tools, or as therapeutic aids
(from P.S. Fiske “Put Your Science to Work”)

Human Robot InteractionHuman Robot Interaction
1.3. Socially Interactive Robots (4/4)
Human as designer, observer and interaction partner
Requires considering the human in the loop From simple reaction to human behavior, to relying on
humans’ mental states and emotions
From P. Persson et al., Understanding Socially Intelligent Agents – A Multilayered Phenomenon
Human Robot InteractionHuman Robot Interaction
1.4. Why Socially Interactive Robots? (1/3)
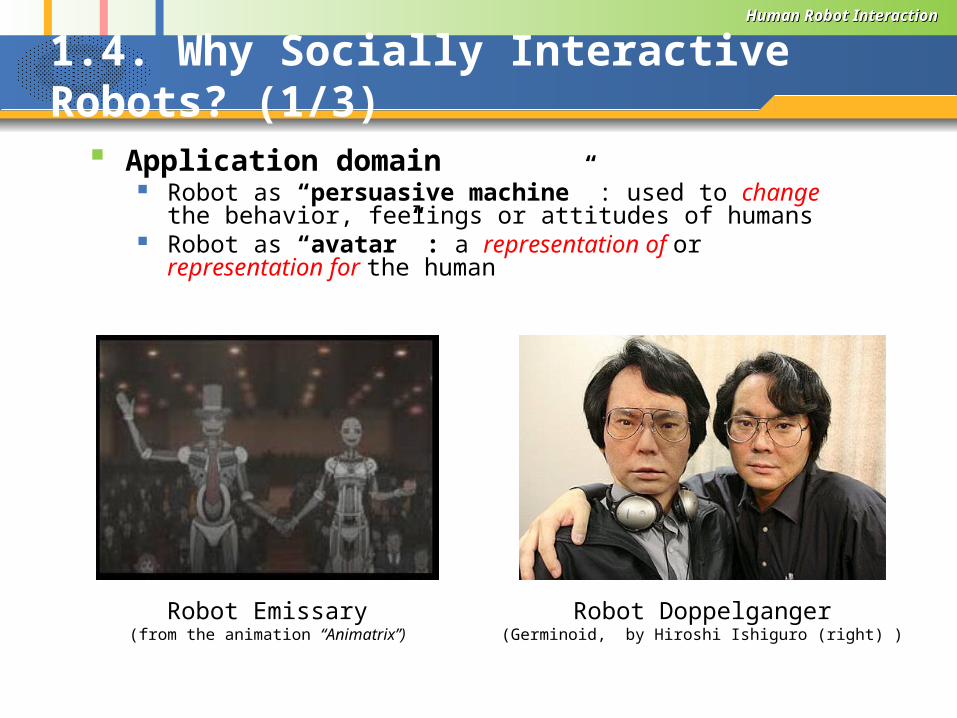
Application domain Robot as “persuasive machine” : used to change
the behavior, feelings or attitudes of humans Robot as “avatar” : a representation of or
representation for the human
Robot Emissary(from the animation “Animatrix”)
Robot Doppelganger(Germinoid, by Hiroshi Ishiguro (right) )

Human Robot InteractionHuman Robot Interaction
1.4. Why Socially Interactive Robots? (2/3)
People want robots have social skills develop their interaction skills themselves (learning
machine) support a wide range of users Can be a part of single person’s life
SAIL and Dav, Self-organizing Autonomous Incremental Learner

Human Robot InteractionHuman Robot Interaction
1.4. Why Socially Interactive Robots? (3/3)
So, robot designers try to… Embed models of social behavior of humans in the
robot increase robot’s effectiveness …for the robot as “natural” interaction partners
Bender, your drinking partner(from the animation “Futurama”)
Marvin, the paranoid android(from the movie “The Hitchhiker’s Guide to the Galaxy”)

Chapter2. MethodologyChapter2. Methodology
44thth Team Team
Human Robot Interaction

Human Robot InteractionHuman Robot Interaction
2.1. Design Approaches
Robot ShapeRobot Shape
Anthropomorphic Robot(Human-like interaction)
Zoomorphic Robot(Creature-like interaction)
Human Social Expectationenjoyable, feeling empowered, competent interaction
Robot FeatureRobot FeatureFaces
Speech Recognition
Lip-Reading Skill
Social Capacities

Human Robot InteractionHuman Robot Interaction
2.1. Design Approaches
Design MethodologyHow are socially interactive robots built?
Biologically-inspired Robot
Socially Socially IntelligentIntelligent
Socially Socially InteractiveInteractive
Functionally-designed Robot
Functionally Functionally StructuredStructured
Socially Socially InteractiveInteractive

Human Robot InteractionHuman Robot Interaction
2.1.1. Biologically Inspired Robot
Anthropology
Structure of Interaction Cognitive Science
Developmental Psychology
Theory of Mind
EthologyInterdisciplinaryResearch
Sociology
- Cognitive, behavioral,
motivational motor
- Perceptual system
- Primary Concepts -1. Naturalistic Embodiment -> “life-like” activity2. Direct Examination about basic scientific theories
COG (MIT/ general purpose humanoid platform)

Human Robot InteractionHuman Robot Interaction
2.1.1. Biologically Inspired Robot
Ethology Observational study of animals in the
natural setting Natural types of activity -> life-like
robot Ex) AIBO
Structure of Interaction Analysis of interactional structure -> Key interaction patterns -> Focus design of perception &
cognition systems Ex) ROBITA: Turn-Taking in dialogue

Human Robot InteractionHuman Robot Interaction
2.1.1. Biologically Inspired Robot
Theory of Mind( 마음과학 )
Ex) Joint attention( 상호주의하기 , selective
attention to the object of mutual interest) -> gaze direction, pointing gestures
Developmental Psychology Effective mechanism for creating robots
that engage in natural social exchanges (dialogue)
Ex) Kismet’s “synthetic nervous system” <- Proto-conversational skill of human three-month infants with their caregiver (initiation, mutual-orientation, greeting, play-dialog, disengagement)

Human Robot InteractionHuman Robot Interaction
2.1.2. Functionally designed Robot
Functionally Functionally StructuredStructured
He is so intelligent He is so intelligent and emotional!!!and emotional!!!
SociallySociallyIntelligentIntelligent
FunctionallyFunctionallyDesigned RobotDesigned Robot
- Constrained operational Constrained operational and performance objectivesand performance objectivesEx) restaurant robot - greeting, serving, cleaning…
- Certain effects and Certain effects and experiences with the userexperiences with the userEx) greeting – joy serving – happiness mistake – sadness …
function1 = happinessfunction1 = happiness function2 = sadnessfunction2 = sadness function3 = angerfunction3 = anger function4 = fearfunction4 = fear

Human Robot InteractionHuman Robot Interaction
2.1.2. Functionally designed Robot
Motivations for functional design Physical Limitation
Short-term interaction Limited quality of interaction Limited embodiment and capability of a robot Constraint by the environment
Effects of Functional Design Affordances(action possibilities) and usability can
be improved even with the limited social expression. (recorded or scripted speech)
Artificial designs can provide compelling interaction. (video games and electronic toys)
Human Robot InteractionHuman Robot Interaction
2.1.2. Functionally designed Robot
Often Used Techniques HCI
Robots are being developed using HCI tech. cognitive modeling, contextual inquiry,
heuristic evaluation, empirical user testing
Systems Engineering Critical-path elements of design -> Effective
and facilitated development and operation Ex) A robot in highly structure domain needs
navigation skills most importantly.

Human Robot InteractionHuman Robot Interaction
2.1.2. Functionally designed Robot
Often Used Techniques (continues) Iterative Design
The process of revising a design through a series of test and redesign cycles
Ex) Willeke’s museum robots – design based on the lessons from preceding generations

Human Robot InteractionHuman Robot Interaction
2.2. Design Issues
Traditional Robot Design issues Cognition- planning and decision making Environment sensing and navigation Actuation- mobility and manipulation Interface, Inputs and display System dynamics- control architecture,
electro mechanics

Human Robot InteractionHuman Robot Interaction
2.2. Design Issues
Social Interaction Issues
Human oriented perception Detecting and organizing gestures Monitoring and classifying activity Discerning intent Measuring the feedback from human peers
Natural Human Robot Interaction Believable behavior Keep up with social norms

Human Robot InteractionHuman Robot Interaction
2.2. Design Issues
Social Interaction Issues
Readable social cues Useful for expression and easy interaction Social cues should be easy to understand Expression, gestures or voice could be adopted
Real-Time performance Should operate at human interaction rates

Human Robot InteractionHuman Robot Interaction
2.3. Embodiment
Concept of Embodiment Extend to which a system can perturb
the environment and get perturbed by the environment defines embodiment
Also looked upon as the complexity of interaction with the environment
The number of modes of interaction with the environment can also be a measure of the same
Human Robot InteractionHuman Robot Interaction
2.3.1. Morphology2.3.3. Anthropomorphic 2.3.4. Zoomorphic
Factors affecting the impact and acceptance of a design
Morphology Physical form has a great influence on the desirability,
expressiveness and accessibility of a robot.
Anthropomorphic Resembling human in form makes peer interaction easier
and stronger. Interaction with familiar forms are easier. Appropriate balance of visual illusion and interactive
functionality.
Zoomorphic Entertainment robots and toy robots. Avoiding Uncanny valley is easier as expectation is lower

Human Robot InteractionHuman Robot Interaction
2.3.2. Design Considerations
If its meant to do tasks for humanness it should portray product ness
If its meant for peer interaction Human ness is important
A considerable amount of
robot ness should be maintained so as to prevent excess confidence in the robot’s abilities
A specific amount of familiarity is to be provided remembering the concept of uncanny valley

Human Robot InteractionHuman Robot Interaction
2.3.5. Caricatured 2.3.6. Functional
Caricatured Its not essential to be realistic to be believable But it can be used to focus or distract attention on to
or away from certain robotic features.
Functionality – (Should be the primary concern) Embodiment should reflect the task to be performed Health care robots will have handles and carriage
space Toy robots should be cheap attractive and durable.

Human Robot InteractionHuman Robot Interaction
2.4. Emotion
Emotions play a significant role In human behavior Communication Interaction
Theories used to describe emotions Discrete categories Continuous scales or basis dimensions Componential theory: categories + dimensions
Why emotion is important? People tend to treat computer as they treat
other people
Happy Sad Frustratedpositivevalence
negativevalence
high arousal
low arousalopen stance
closed stance

Human Robot InteractionHuman Robot Interaction
2.4.1. Artificial emotion
Artificial emotion used in social robots Emotion helps HRI Provide feedback to user Act as a control mechanism
How robot display emotion? From small DOF to many DOF Kismet

Human Robot InteractionHuman Robot Interaction
2.4.2. Emotions as control mechanism
Determine control priority Different behavior mode Trigger learning and adaptation
Example – Sage Person blocking Sage’s path
[frustrated] “I am giving a tour to these visitors right now. Please
let me continue!”
[happy] playful and enticing, engaging the visitor and inviting
the person on a tour

Human Robot InteractionHuman Robot Interaction
2.4.3. Speech
Emotional speech Effective method for communicating Parameters
Loudness Pitch: level, variation, range Prosody
Kismet’s vocalization system
Human Robot InteractionHuman Robot Interaction
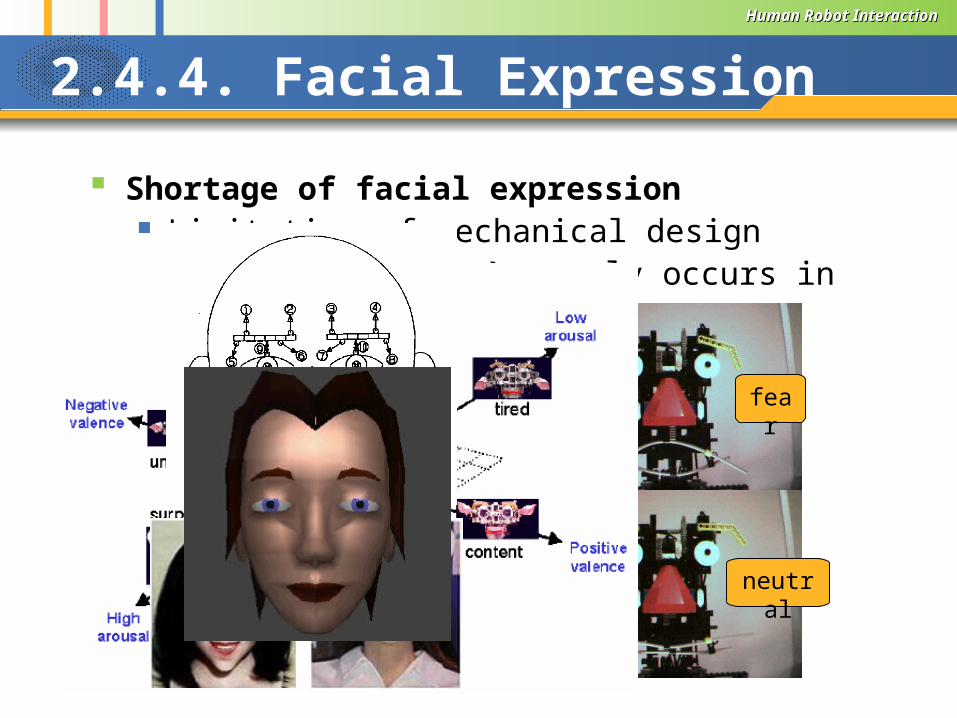
Shortage of facial expression Limitation of mechanical design
Abrupt change rarely occurs in nature
Mechanical approach Varies with DOF of actuators Feelix, Kismet, Saya
Computer grahpic approach Vikia
fearsurprise
anger
neutralsadnesshappy
2.4.4. Facial Expression

Human Robot InteractionHuman Robot Interaction
2.4.5 Body language
Importance of body language 90% of gesture occur during speech Strong tendency to be cued by body language
Emotional body movements Anger Fear Happiness Sadness Surprise

Human Robot Interaction