44935336 working together on automated vehicle guidance preliminary business plan abridged version
TRANSCRIPT

orking together onAutomated Vehicle Guidance
y business plan
abridged version
Ministry of Transport, Public Works and Water Management

Working together onAutomated Vehicle Guidance
Preliminary business plan
abridged version
Ministry of Transport, Public Works and Water Management
University of Groningen, Centre for Environmental and Traffic Psychology
Institute for Road Safety Research SWOV
Delft Technical University/TRAIL: the Netherlands Research School for
Transport, Infrastructure and Logistics
TNO: Netherlands Organisation for Applied Scientific Research

Contents
Summary
AVG: from cruise control to auto-pilot?
State of the art
AVG: pros and cons
Towards a business plan
Colophon
11
14
23

Summary
Automated Vehicle Guidance (AVG) - systems which assist drivers to carry out the driving task and partially
or wholly take over this task - is no longer science fiction. AVG technologies are developing apace. Practical
applications of AVG, for both passenger and freight transport, are already to be seen, and advanced systems
will soon be launched onto the market.
AVG systems are expected to have a major impact on the 'regular' road network. AVG
promises to be a very effective traffic control tooi, with enormous potential for enhancing
traffic flow rates, reliability, safety and environmental quality. It also appears to have great
potential economie benefits, both for industry and for society as a whole. Automation of the
driving task in one form or another will increasingly become a fact of life. Large investments
are being made worldwide in a range of innovative developments which will be introduced
into transport systems. This can take many different forms and occur at many different rates.
Government transport policy must take these developments into account.
Forming a vision
In order to reap the benefits and offset or avoid the disadvantages of AVG, correct and timely
choices will have to be made. In order to achieve this, parties must cooperate together to
fashion a vision on AVG and on the policy to be adopted. A business plan can then be created
to serve as a guide for a collective voyage to discover desirable AVG applications.
Preliminary business plan
Preparatory work has been done. The Ministry of Transport, Public Works and Water
Management, University of Groningen, SWOV, TNO and TRAIL have drawn up a preliminary
business plan, of which this booklet is an abridged version. This plan describes the questions
which will have to be answered in the short term, and the actions which need to be taken in a
phased and structured manner to gain greater insight into the potential of AVG.
A two-pronged approach is proposed: on the one hand practical projects will be carried out
which act as a catalyst in expertise development and cooperation amongst the various parties.
On the other hand it is envisaged that an AVG Coordinating Body will be set up which acts as
a facilitator for an AVG network, provide for coordination and the exchange of information,
draw up, amend and implement the AVG Business Plan, and coordinate international action.
The projects (and actions) are classifïed by the themes technology, scenarios, stakeholders, legal
aspects, user-related issues, infrastructure and relationships. These themes relate both to goods
transport and to individual and collective passenger transport. On the basis of priorities and
dependencies, the proposed approach describes the relationships between the various actions.
In order to properly take into account the AVG developments which emerge in the short term,
a reactive approach is proposed with a short cycle of one or two years. This approach is
intended to provide the government and others with the knowledge and instruments they

need to take short-term policy decisions and to instigate actions. The short-term approach is
geared towards allowing a quick response to changes in the environment.
An active, iterative approach is proposed regarding the medium and long term. This approach
is intended to provide the authorities and others with the knowledge and instruments with
which they can develop alternatives and consciously influence the direction of developments.
Cooperation
Assessing the potential of AVG will call for the coordination of forces, the concentration
and dissemination of knowledge and understanding: in short, cooperation. The prelimi-
nary business plan can be developed further with all relevant and interested parties into an
AVG Business Plan. This will provide a basis for determining whether AVG is desirable, and
if so, how, in what form and under what conditions. It will help to determine the role for
AVG in the overall transport system, and will provide an understanding of the instruments
which can be deployed to influence the development of AVG.

AVG: from cruise control to auto-pilot?
The aircraft has now reached cruising altitude. While the passengere are enjoying their free drink, KLM
captain Jan Oosterlaan is having a relaxed chat with his co-pilot. Above and to the left an Alitalia machine is
passing by - at a safe distance. Air traffic control had announced it and the radar screen confirms its presence
with a clear bleep. Their Italian counterparts are probably also chatting about their partners and their children
because the work on their flight is also being done by on-board computers. The destination has been
programmed in, and the fly-by-wire systems maintain the machine on course at the right altitude. The
Wright brothers would be astonished if they could see this scène in the cockpit. And they would be
completely bowied over if they knew that the automatic pilot would soon land the aircraft perfectly.
A lot has happened in the nearly 100 years that we have been flying. Not only in terms of
aircraft design and aero-engine technology; it is in fact the automatic pilot - computer
systems combined with telematics which have taken over most of the flying tasks - which has
made flying the safest mode of transport per passenger-kilometre, despite soaring air traffic
volumes. And apart from the odd person with a chronic fear of flying, everyone finds it the
most normal thing in the world.
Feasibility and desirability
Similar developments are occurring for 'ordinary' traffic. The first systems which support or
even take over (routine) driving tasks in both passenger and freight vehicles are already
available. This is referred to as Automated Vehicle Guidance (AVG). Whether or not we see,
within several decades, passenger and freight vehicles being operated by automatic pilots is
unlikely to depend on technical factors. It is rather a matter of whether we wish to see such a
development and what sensible, more modest, intermediate forms would be possible. Would
such a development on the roads also increase safety and enhance the utilisation of the road
capacity and improve traffic flows? Might it not lead to further, undesired growth of traffic
volumes? What will be the impact on energy consumption and the emissions of pollutants?
And if we are convinced of the desirability of AVG, is it not nevertheless questionable
whether drivers will be willing to allow the driving task to be literally taken out of their
hands, even partly? Individual and social acceptance still seem a long way off. And what will
be the legal ramifications of radical changes in tasks and responsibilities on the road? Who
will be responsible if something goes wrong? The driver, sitting with his arms folded, the
manufacturer of the on-board electronics system which failed or the road operator with his
'intelligent' infrastructure? What is the role of government in making the desired applications
of AVG a reality, what instruments are appropriate and how should the tasks be apportioned
between the public authorities and the private parties concerned? What is the place of AVG in
the overall transport system?
This preliminary business plan is intended to formulate the right questions and to be helpful
in answering these questions.

Questions and choices
There appears to be tremendous potential for AVG to contribute to a fundamental and
worthwhile regeneration of the transport system. All kinds of (technical) developments are
occurring in this area: applications for individual and collective passenger transport and freight
transport; with effects on the main highway network but also on the secondary and urban road
network; support systems, some of which require equipment in the vehicle only, while others also
require facilities to be installed in the infrastructure so as to achieve an interaction. Major
investments are being made worldwide in a whole range of innovations in these areas.
Government transport policy must take these developments into account. We shall need to
reflect on what is desirable and what is not. And we must make sure we are well prepared: so that
we do not make policy on an ad hoc basis but ensure that inevitable decisions are made on the
basis of sound and reasoned choices, and in good time. AVG can then be developed and
introduced in a gradual and controlled manner. Phasing is feasible because it is not a question of
all or nothing. Developments in specific areas of AVG can be curbed, accelerated or adjusted as
they emerge. But, just as with driving, acceleration, steering and braking are only sensible if a
destination has been chosen. Or at least the general direction we wish to travel.
This preliminary business plan describes a process which can help to determine our destination
and the direction in which we should proceed. This process will help us to form a vision on AVG
and on the policy to be adopted. So that the right questions about AVG can be asked and the
right choices made in good time. The broad lines of a forward-looking cooperation between
government, research institutes, academia and the private sector are outlined which will give
substance to this process. Those with whom this strikes a chord are warmly invited to join in
developing a vision on AVG.
State of the art
Automated vehicle guidance is not only a technology of the future. AVG technologies are being developed at
full tilt. The concepts of the automated guidance of vehicles 'on the ground' were elaborated decades ago.
Concrete applications of AVG were developed not only for passenger and goods transport, but also for
service applications and maintenance. There are automatically guided snow-ploughs and rescue vehicles for
use in the Channel Tunnel, and automatically controlled buses and vehicles in factories are commonplace.
So-called 'people movers' - vehicles without a driver for collective passenger transport at airports, theme
parks, etc. - are a familiar sight. In the French town of Lille there is an unmanned metro and in Essen in
Germany there is an automatically guided 'Spuhrbus'.
In most cases these are closed systems with their own dedicated infrastructure run by a single
operator. In the Dutch 'Combi-Road' project (see box), semi-trailers are pulled by
automatically controlled vehicles driving on their own separated (test) track.
Some systems, such as those based on the 'Free Ranging On Grid' (FROG) system, permit a
greater freedom of movement. This technology was developed for the automated/unmanned
transportation of containers but is also used in other applications. For example at Schiphol
airport where a 'Parking Hopper' uses this technology to carry passengers within the long-
term parking area. And between the metro station Kralingse Zoom and the Bussiness Park
Rivium in Capelle aan den IJssel, where a people mover will be operational shortly (see box
next page).
COMBI-ROAD
The Netherlands is taking a leading role in developing AVG initiatives for freight transport.
Combi-Road is a large-scale project in this field. Combi-Road is a new concept for transporting
containers on semi-trailers, which for the time being uses a separate infrastructure with guide rails.
The fully automated vehicles are powered electrically.
Combi-Road reduces the number of vertical handlings because the container is transferred on its
semi-trailer. This allows cost savings and ready integration into a multimodal transport concept.
Combi-Road vehicles are designed for a speed of 50 km/hr, but are not subject to congestion, and
can therefore play a role in 'just in time' systems. A test track of about 200m is available for the
testing and demonstration of the system. In a follow-up project the guide rails will disappear with
the introduction of the Magnet Marker Sensing System, a technology developed in the US. A 2 to
3km test track is foreseen so that the effects of driving in convoy can be tested. This will be used to
assess the feasibility of applying Combi-Road on a large scale.

Automated Highway Systems
It becomes more complicated when we try to apply AVG on the public highway network.
When used on public highways the concept is referred to as 'Automated Highway System'
(AHS). Many initiatives and developments in this area can be cited: from Adaptive Cruise
Control, already operational and ready for commercialisation, which not only maintains a
constant speed but also a proper headway, to more complex systems in which AVG takes on
increasing numbers of driving tasks. The technology can all be contained in the vehicle, but
data processing and informaties components are sometimes installed in the infrastructure,
involving an interaction between road and vehicle.
The European research and development programmes Prometheus and DRIVE were oriented
towards providing information and support to the driver, and on automating some driving
tasks (Collision Avoidance Systems, (Autonomous) Intelligent Cruise Control, Lane Keeping,
Intelligent Manoeuvring). The fourth European Commission (EC) framework programme
includes projects such as Urban Drive Control, Chauffeur, designed to electronically link
lorries into a convoy, and SAVE, which automatically brings a vehicle to rest at the roadside if
the driver becomes incapacitated. These studies and research programmes are all generating
knowledge and experience which can be utilised in an appropriate mix of AVG applications
on a larger scale, or in an 'open' situation.
A demonstration was given in September 1996 on the Joshinetsu Expressway in Japan with a
platoon of automatically driven cars. Since then a number of Japanese ministries, the research
community and the motor and electronics manufacturers have got together to form the
Advanced Cruise-Assist Highway System Research Association (AHSRA). The objectives of
AHSRA encompass information systems, driver support systems and full automation with the
emphasis on short-term traffic safety applications.
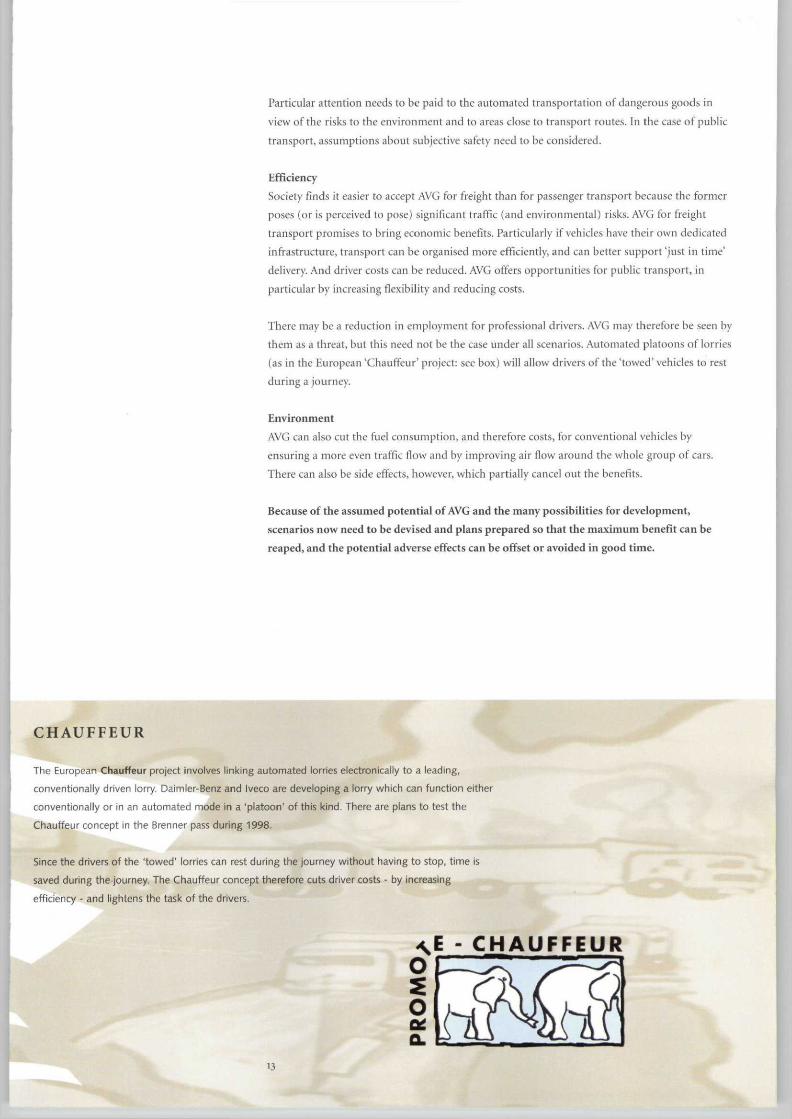
PARK SHUTTLE AND PARKING HOPPER
The Schiphol Parking Hopper (operational) and The Rivium Park Shuttle (under construction) are
based on the same concept as the fully automated vehicles for container handling at the ECT
Sealand Terminal in Rotterdam. This so-called FROG concept (Free Ranging On Grid) was
developed in the Netherlands. The special vehicles are assigned a destination by a control centre.
The vehicles make use of a built-in map. They determine their position on the basis of the distance
traversed in relation to markers in the road. This system requires equipment to be installed in the
infrastructure, but this equipment is neither very complex nor very costly.
FROG systems are well suited to bridging gaps in an intermodal transport network, for example as
connections between car-parks and airport departure halls, between ship and lorry or to connect
with metro or train. These systems are seen as having great potential in the short term because
they are both feasible in technological terms and socially acceptable.
In the US, the National Automated Highway System Consortium (NAHSC) went ahead with
the AHS demonstration which was mandated by the Intermodal Surface Transportation
Efficiency Act. In August 1997 the technical feasibility of AHS was demonstrated to an
international audience in San Diego. NAHSC concentrated on the complete automation of
the driving task, but the establishment of the American Intelligent Vehicles Initiative (IVI)
shifted the focus to subsystems capable of being deployed in the short term.
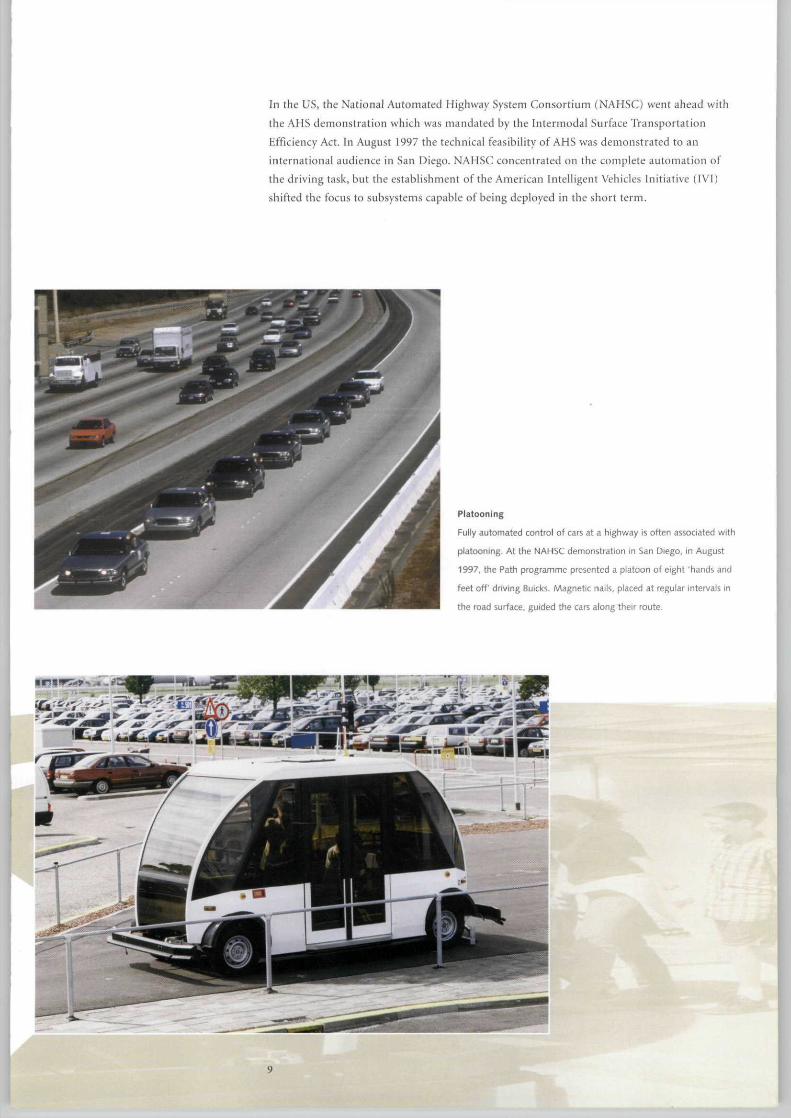
Platooning
Fully automated control of cars at a highway is often associated with
platooning. At the NAHSC demonstration in San Diego, in August
1997, the Path programme presented a platoon of eight 'hands and
feet off' driving Buicks. Magnetic nails, placed at regular intervals in
the road surface, guided the cars along their route.

Concrete systems on the road
As a spin-off from research of this kind, which also has applications in built-up areas, systems are
likely to emerge shortly such as ISA (Intelligent Speed Adaptation - a system which controls
maximum vehicle speed externally) and automatic parking systems. A pilot project involving the
introduction of intelligent speed adaptation is planned for next year in a district of Tilburg.
A Collision Warning System has been marketed in the US for years, and Mitsubishi cars can
already be found on Japanese roads with an Adaptive Cruise Control (see box). Various other
manufacturers have also announced that they are likely to be selling cars with AVG applications
this year.
The influence of the Netherlands
It is clear that AVG in the Netherlands cannot be considered in isolation from international
developments. But can the Netherlands influence these developments 'at source'? Although there
are a number of specialist suppliers, a well-established lorry and bus manufacturing sector and a
flourishing information and Communications technology industry in the Netherlands, it has no
major car manufacturing industry of its own. Dutch activities will only be meaningful and
efficiënt if carried out within international fora.
In the short term, contact with the international motor manufacturing industry is important in
order to be prepared for systems which soon will emerge onto the market. In the medium and
long term, it is important that the Netherlands participates in international research programmes
such as the EC framework programmes, the pre-competitive activities of the European industry
and programmes extending beyond European frontiers. International activity can also help to
ensure that Dutch interests are represented and promoted as much as possible. This will be of
benefit to 'The Netherlands Inc.' and enhance the position of the Netherlands as a centre of
expertise.
FROM INTELLIGENT CRUISE CONTROL TO ADAPTIVE CRUISE CONTROL
Cruise control systems capable not only of maintaining a constant speed but also a proper distance
to the vehicle ahead are about to be launched onto the market. These systems have long been
referred to as Intelligent Cruise Control (ICC). ICCs which can function without communicating
with other vehicles or with the infrastructure are referred to as AICC, where the A stands for
'Autonomous'. Alongside 'ICC' and 'AICC', the term ACC (where the A stands for Adaptive or
Advanced) is now gaining currency.
At the heart of an ACC system is a sensor which measures the distance to the car ahead as the
example in the picture illustrates (Prometheus, 1994): not a simple business, since bends, stationary
objects at the roadside and rain or water spray must not be allowed to confuse the sensor. On the
basis of speed relative to the car ahead and the difference between the measured distance and the
desired distance set, the ACC controls the throttle and, depending on the particular model, the
brakes and/or the gears in the case of automatic transmission. The present ACC concept is not
intended to have a collision avoidance function. The system works for normal car following
situations, but in cases where hard braking is needed, driver intervention is required.
10

AVG: pros and cons
By supporting and taking over the tasks of the driver, AVG can greatly enhance safety, reliability and
efficiency in traffic systems, as has already occurred in aviation and industrial processes. But this result will
not be achieved of its own accord.
First of all, AVG requires equipment in vehicles, in particular sensors, instrumentation and
control equipment. More advanced applications require an interaction between vehicles and
the infrastructure, which must also therefore be provided with 'intelligence'. There will be a
transitional period when not all vehicles will be equipped with on-board intelligent AVG
systems, and those that are, not all to the same extent. Vehicles with AVG systems will be
driving for some of the time on infrastructure modified to permit an interaction and for
some of the time not. The rate of penetration of AVG system components into the vehicle
fleet will obviously be related to the rate at which lorries, buses and cars are replaced. It may
be that in some situations, perhaps in specific sections of the transport system, it is more
sensible and desirable to take a revolutionary leap forward rather than to adopt a more
gradual approach with lower benefits. In addition, it is necessary to keep an eye on the
interface with developments in technology and policy in related areas such as dynamic traffic
management, travel information, developments in engine technology and fuels. These factors
all make the transition towards a more widespread and intensive application of AVG long and
complex.
Karlsruhe StuttgartWendiingen
It was announced back in 1994 that the first ICCs would be seen on the European market in two
years. Individual European car manufacturers are indicating that they will actually be offering ACC
as an option on their top-of-the-range models. ACCs are already being used on Japanese roads on
a limited scale. The effects of ACC on traffic flows and driver behaviour have been researched in a
number of studies. Results vary from an improvement in the flow of traffic to a deterioration. There
are also indications that ACCs have an effect on driving speed and on drivers' reaction times. The
particular characteristics of the system (for example the set headway) and the percentage of
vehicles equipped with ACC have an important influence on the effects.
11

Side-effects
Unintended side effects can also occur. Local improvements in traffic flow may lead to problems
being displaced, particularly in passing from intelligent infrastructure to traditional roads. The
gain in comfort and convenience of driving as more road users have access to AVG can result in a
general increase in road use. Another undesirable side-effect is that automation of sections of the
road network may result in drivers becoming less experienced, which may serve them badly on
non-automated sections of the road network.
High expectations
Despite this, AVG systems are expected to have a major impact on the 'regular' road network. The
NAHSC (National Automated Highway System Consortium) in the US is talking of a two or
three-fold improvement in traffic flow rates, fuel savings of 30% - with corresponding benefits in
exhaust emissions - and a 50-80% reduction in accidents. There may of course not be the same
potential for AVG in the Netherlands, where the traffic conditions and the transport system are
different, and this will have to be studied. However AVG does appear to be a very effective traffic
management tooi with enormous potential for enhancing traffic flow rates, reliability, safety and
environmental quality. There also appear to be major potential economie benefits for industry
and for society as a whole.
Safety
Many accidents are caused by human error. This can be reduced by AVG. This does place very
stringent demands on system safety, however. Many small accidents could be replaced by major
traffic disasters as in air traffic. Even if the result were a net increase in safety, it is questionable
whether infrequent but major disasters would be acceptable to society.
Another side-effect of AVG (in the case of partial automation) is that drivers might take extra
risks: to compensate, as it were, the increased safety. Such a phenomenon occurs, for example, in
the case of drivers of cars equipped with anti-lock braking systems.
:/* /
12
Particular attention needs to be paid to the automated transportation of dangerous goods in
view of the risks to the environment and to areas close to transport routes. In the case of public
transport, assumptions about subjective safety need to be considered.
Efficiency
Society finds it easier to accept AVG for freight than for passenger transport because the former
poses (or is perceived to pose) significant traffic (and environmental) risks. AVG for freight
transport promises to bring economie benefits. Particularly if vehicles have their own dedicated
infrastructure, transport can be organised more efficiently, and can better support 'just in time'
delivery. And driver costs can be reduced. AVG offers opportunities for public transport, in
particular by increasing flexibility and reducing costs.
There may be a reduction in employment for professional drivers. AVG may therefore be seen by
them as a threat, but this need not be the case under all scenarios. Automated platoons of lorries
(as in the European 'Chauffeur' project: see box) will allow drivers of the 'towed' vehicles to rest
during a journey.
Environment
AVG can also cut the fuel consumption, and therefore costs, for conventional vehicles by
ensuring a more even traffic flow and by improving air flow around the whole group of cars.
There can also be side effects, however, which partially cancel out the benefits.
Because of the assumed potential of AVG and the many possibilities for development,
scenarios now need to be devised and plans prepared so that the maximum benefit can be
reaped, and the potential adverse effects can be offset or avoided in good time.
CHAUFFEUR
The European Chauffeur project involves linking automated lorries electronically to a leading,
conventionally driven lorry. Daimler-Benz and Iveco are developing a lorry which can function either
conventionally or in an automated mode in a 'platoon' of this kind. There are plans to test the
Chauffeur concept in the Brenner pass during 1998.
Since the drivers of the 'towed' lorries can rest during the journey without having to stop, time is
saved during thejourney. The Chauffeur concept therefore cuts driver costs - by increasing
efficiency - and lightens the task of the drivers.
^E - CHAUFFEUR
13
Towards a business plan
Automation of the driving task in one form or another will increasingly become a fact of life. This can take
many different forms and occur at many different rates. If we wish to influence the process then it is time to
develop a vision on AVG and on the policy to be adopted. The public authorities, research institutes,
universities and the private sector can then together seek to answer the many questions which arise, and
make choices accordingly.
This voyage of discovery has already started. The Ministry of Transport, Public Works and Water
Management has taken the first steps, together with the University of Groningen, SWOV, TNO, and TRAIL,
towards creating a dynamic AVG business plan. Seven working sessions were held involving experts from
government, research institutes, universities and the private sector, in which questions were identified which
need to be answered in the short term. Based on these working sessions, a list of actions was drawn up,
grouped by the themes technology, scenarios, stakeholders, legal aspects, user-related issues,
infrastructure and relationships. These themes (discussed further at the end of this section) relate both to
goods transport and to individual and collective passenger transport. Based on priorities and dependencies,
the proposed approach describes the relationships between the various actions. This plan sets out in a
phased and structured manner the actions which need to be taken to provide greater insight into the
potential of AVG.
Communications
While we assume that AVG can both make traffic safer and more efficiënt, and can increase
user convenience, these potential benefits will not necessarily happen of their own volition.
Communications - at the right moment, in the right way and with the right parties - is
essential to make these developing concepts known, and to learn from the reactions of those
involved.
These parties must be brought into the development, research and policy-making. The future
users must also be informed, and will need to become involved before making use of possible
AVG applications. AVG may initially be seen as infringing the freedom of road users. Success
or failure in automating the driving task depends on the concept being accepted by the
individual and by society as a whole. Communications will therefore have a vital role in
implementing the plan, and must help to build user acceptance.
14

Two-pronged approach
In order to produce a business plan which fully recognises the importance of Communications,
a two-pronged approach is proposed. On the one hand practical projects will be carried out
which act as a catalyst in developing expertise and cooperation amongst the various parties.
These projects will include both the activities listed in the proposed approach and described
below and pilot studies. On the other hand it is envisaged that a central body will be set up to
act as focal point for coordination, the exchange of information and overseeing developments:
an 'AVG Coordinating Body' which will act as a facilitative body, provide for coordination and
the exchange of information, which would draw up, amend and implement the AVG Business
Plan, and coordinate international action. The AVG Coordinating Body will not itseif carry out
concrete pilot and other projects, but will play a part in promoting cooperation and coherence,
facilitating Communications and, above all, the exchange of information between projects and
to interested parties in government and elsewhere. Relations between the Coordinating Body
and other existing and developing cooperative organisations should be taken into account.
Proposed approach
Three relevant timescales are regarded in the proposed approach:
the short term - in relation to systems becoming available on the market within a few
years;
the medium term - within the planning term for new infrastructure, i.e. around ten years;
the long term - with a horizon of more than ten years, during which new transport con-
cepts may be developed and introduced.
The proposed approach is based on the principle that 'thinking' (scenarios, concepts for
development) and 'doing' (pilot projects) reinforce one another.
'S

Short term: reactive
In order to properly take into account the AVG developments which emerge in the short term,
an approach is proposed which allows a rapid response to changes in the environment. This
'reactive' approach has a short cycle of one or two years, and will provide the government and
others with the knowledge and instruments they need to take short-term policy decisions and
to instigate actions. The approach is geared towards mobilising existing knowledge and
quickly generating the additional information needed. This allows a number of alternatives to
be formulated and a Communications strategy to be developed.
The choice of policy and, therefore, of policy actions is guided by an analysis of the
manageability of the alternatives. This approach must of course be kept under review in
relation to the vision for the medium and long term: it must be consistent and offer scope
and flexibility within this framework.
Mobilise existing
knowledge (input):
• technology
• infrastructure
development
• identify promising
avenues
• changes in traffic
behaviour
" interaction AVG/non-
AVG
• possibilities and
consequences for
secondary and urban
road networks
• behaviourai changes in
car use
• attitudes, acceptance
• models to quantify
effects
• legal framework
• pilots and demonstration
proiects
• legal case studies, early
AVG
1
I
scenarios (alternative
strategies)
concepts for implementation
assessment criteria and
methods
additional research and
pilot projects
Approach regarding the short term
stakeholders analysis
create communicable
images of AVG
Communications plan
The reactive approach regarding the short term involves: knowledge acquisition (by mobilising existing information
and developing new one), tools to assist decision-making and action, formulation of alternatives, development of
Communications strategy, manageability analysis, policy decision(s), policy actions.
16
Societal and policy
developments
Doing:
• pilots and
demonstration
projects
• legal case studies,
early AVG
Thinking:
• scenarios
- final images
- migration paths
• concepts for
development
• infrastructure
development
Description of
Monitor technoic
(vehicle and
infrastructure)
Traffic-related and behaviourai effects:
• develop models for quantifying
effects
• expiore behaviourai changes in car
use
• test for changes in traffic behaviour
• interaction AVG/non-AVG
• possibilities and consequences for
secondary and urban road networks
Relationships and acceptance:
• stakeholders analysis
• create communicable images
• develop Communications plan
• expiore attitudes and acceptance
Approach regarding medium and long term
Test against:
(policy)
objectives
Manageabiltty
I analysis
Promising
avenues
More focused
(policy) vision
learn
im prove
adjust
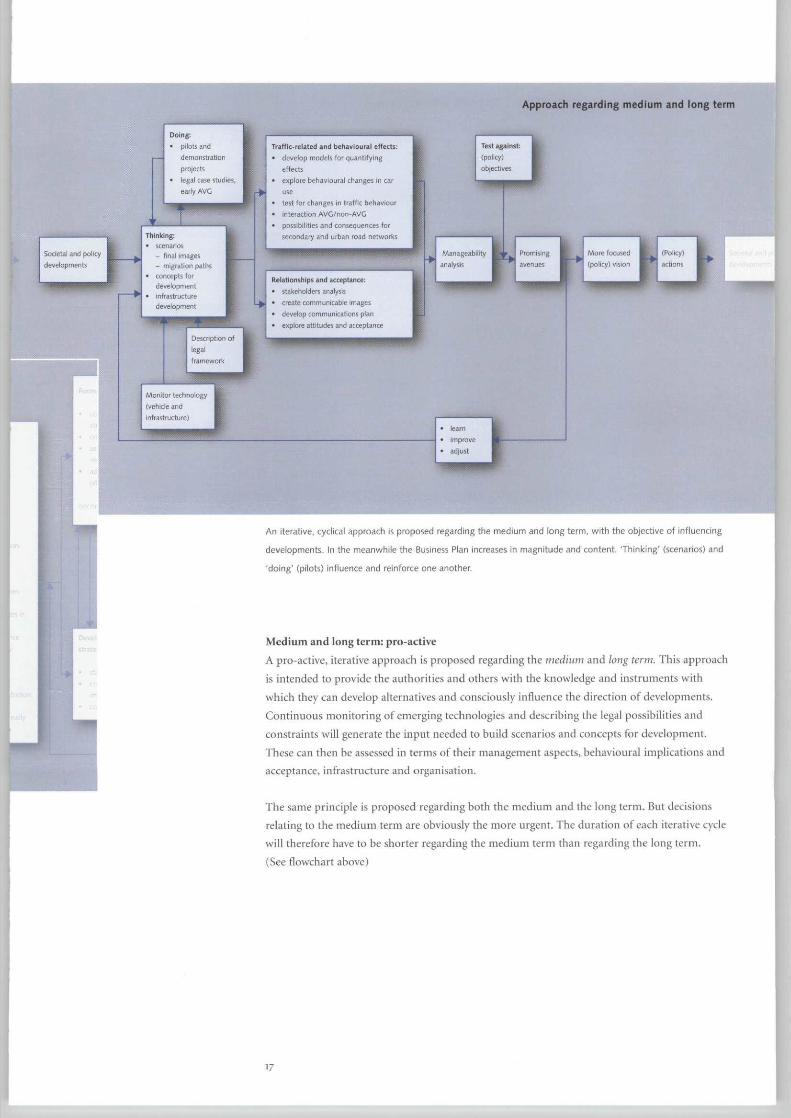
An iterative, cyclical approach is proposed regarding the medium and long term, with the objective of influencing
developments. In the meanwhile the Business Plan increases in magnitude and content. Thinking' (scenarios) and
'doing' (pilots) influence and reinforce one another.
Medium and long term: pro-active
A pro-active, iterative approach is proposed regarding the medium and long term. This approach
is intended to provide the authorities and others with the knowledge and instruments with
which they can develop alternatives and consciously influence the direction of developments.
Continuous monitoring of emerging technologies and describing the legal possibilities and
constraints will generate the input needed to build scenarios and concepts for development.
These can then be assessed in terms of their management aspects, behaviourai implications and
acceptance, infrastructure and organisation.
The same principle is proposed regarding both the medium and the long term. But decisions
relating to the medium term are obviously the more urgent. The duration of each iterative cycle
will therefore have to be shorter regarding the medium term than regarding the long term.
(See flowchart above)
17

Themes and actions
The actions included in the proposed approach are classified into the seven chosen themes in
the table overleaf:
Theme 1 Technology
New technologies which are gradually automating the driving task are being developed
worldwide. Theme 1 actions emphasise monitoring international developments and asses-
sing the technologies for both vehicles and infrastructure.
• Theme 2 Scenarios (technical and organisational)
In policy terms the prospect of automating the driving function seems worthwhile.
Theme 2 relates to vehicles, the infrastructure (including telematics) and the interaction
between them; formulating possible final images, migration paths and concepts for deve-
lopment; devising means of testing these concepts in practice with the help of pilot and
demonstration projects; the effects and consequences (programming, costs, organisation,
etc).
• Theme 3 Stakeholders, theme 4 Legal aspects, theme 5 User-related issues
The opportunities and threats are mainly associated with societal and individual accep-
tance, the behaviourai aspects and the possibilities and constraints resulting from national
and European law. These are the aspects with which themes 3, 4 and 5 are concerned.
Theme 6 Infrastructure
The focus of this theme is the interaction between AVG and the infrastructure (develop-
ment).
Theme 7 Relationships
It emerged during the working sessions that Communications are vital in practically all
aspects. International developments in AVG are also crucial. The roles of the various par-
ties need to be determined, both while the policy vision is being elaborated and during
the implementation of AVG systems. These roles are not fixed beforehand, and may, for
example, be scenario-dependent. These aspects are all considered under theme 7.
These themes represent the various areas which will need to be considered in formulating a
vision with regard to AVG and to policy in this area. As can be seen in the table overleaf, a
weight has been assigned to each of the themes. This weight, lying on a scale from zero to ten
for each time horizon, indicates the importance to be attached to that theme during the
coming two to three years as proposed in the preliminary business plan.
IS

Action per theme (for the coming 2 to 3 years)
Theme 1: Technology
1.1 Monitor technology (vehicle and infrastructure)
1.2 Formulate technology-independent performance criteria
1.3 Develop tools, test system conditions
Theme 2: Scenarios
2.1 Scenario development: final images and migration paths
2.2 Concepts for development
2.3 Pilots and demonstration projects
2.4 Development of models for integrated effect quantification
2.5 Identify promising avenues
weight
weight
Theme 3: Stakeholders
3.1 Stakeholders analysis
3.2 Analyze manageability of AVG developments
weight
Theme 4: Legal aspects
4.1 Description of legal framework
4.2 Legal case studies based on early forms of AVG
weight
Theme 5: User-related issues
5.1 Test for changes in traffic behaviour
5.2 Expiore attitudes and acceptance
5.3 Expiore behaviourai changes in car use
5.4 Interaction between AVG/non-AVG
weight
Theme 6: Infrastructure weight
6.1 Infrastructure development
6.2 Possibilities and consequences for AVG on the secondary and urban road networks
Theme 7: Relationships
7.1 Establish an AVG Coordinating Body
7.2 Establishment and positioning of Business Plan
7.3 Coordinate international activities
7.4 Develop Communications strategy
7.5 Create communicable images of AVG
weight
7 1/2
X
X
8 72
X
X
X
X
5 1/2
X
X
1 / 2
X
X
X
X
X
X: applies to this term
X: emphasis on this term
19

Cooperation
Assessing the potential of AVG will call for the coordination of forces, the concentration and
dissemination of knowledge and understanding: in short, cooperation. The first step has been
taken: an AVG Business Plan can be developed from the proposed approach. This will provide a
basis for determining whether AVG is desirable, and if so, how, in what form and under what
conditions. It will help to determine the role for AVG in the overall transport system, and will
provide an understanding of the instruments which can be deployed to influence the
development of AVG. Agreements will be needed on the form which cooperation is to take: those
who will be involved, the distances to be maintained between the participants, who will
undertake which of the (proposed) actions, in what sequence and at what pace. Also to be
determined are the conditions for cooperation, whether an AVG Coordinating Body is needed
and if so, what its roles and tasks should be. Relations between the Coordinating Body and other
existing and developing cooperative organisations should of course be taken into account.
Another matter requiring attention will be the growth path proposed in the preliminary business
plan: as AVG policy takes shape and is implemented, the numbers of parties involved and actively
participating will grow.
AVG DEMONSTRATION: DEMO'98
At a closed road section (east of Leiden, part of the N11 under construction) an international
demonstration of the state of the art in the field of AVG is held in the summer of 1998.
The event is organized by the Ministry of Transport, Public Works and Water Management in
cooperation with TNO and the EC.
Demonstrations from all around the world are included: The Netherlands, Europe, the US and
Japan. Not only high tech prototypes are shown but also products are presented, which are
about to be launched on the market.
A five day symposium will run in parallel to the demonstrations. Politicians, policy makers,
researchers, interest groups and the private sector are invited to give their opinion on AVG and
to propose joint activities. At Demo'98, the progress of the voyage towards the AVG Business
Plan is presented.
20

Flight KL 662 has landed. Captain Jan Oosterlaan gets into the automated 'Parking Hopper', having
completed the debriefing in the crew centre. He is conveyed in comfort to his car in the long-term car park.
Once in his car on the motorway, Jan switches on the cruise control. He has also got used to support
systems in his car; he finds they help him to drive calmly, economically and comfortably. Fortunately his car
is almost due for replacement. He is looking forward to having a car with the recently announced Adaptive
Cruise Control. A new car with this feature will certainly earn his vote.

Colophon
A steering group and a project group were appointed to draw up this preliminary AVG business
plan.
The steering group consists of:
P.H.L. Bovy
R. Filarski/E.J. van de Kaa
J. Godthelp
G.R.M. Jansen
S. Oppe
C.W.A.O. van Raalten
J.A. Rothengatter
M.T. Zandstra (Chairman)
Delft Technical University/TRAIL
Transport Research Centre (V&W-AW)
TNO Human Factors Research Institute (TNO-TM)
TNO Traffic and Transport (TNO-VV)
Institute for Road Safety Research SWOV
Rijkswaterstaat (V&W-RWS)
University of Groningen
Directorate-General for Passenger Transport
(V&W-DGP)
The contact person at the Ministry of Transport, Public Works and Water Management -
Directorate-General for Passenger Transport is Mr. J.C. van der Zwart.
The members of the project group are:
B. van Arem
K.A. Brookhuis
M.J. Coëmet (project leader)
T. Heijer
V.A.W.J. Marchau
A.P. de Vos
H J. van Zuylen
TNO Institute of Infrastructure, Transport and
Regional 1 Vvelopment (TNO-Inro)
University of Groningen
Transport Research Centre (V&W-AW)
Institute for Road Safety Research SWOV
Delft Technical University/TRAIL
TNO Human Factors Research Institute (TNO-TM)
Transport Research Centre (V&W-AW)
For more information on the preliminary business plan contact Ms. M.J. Coëmet, Ministry of
Transport, Public Works and Water Management, Transport Research Centre,
telephone: (+31) (0)10-2825888.
For more information on the cooperation in relation to the business plan, contact:
Mr. J.C. van der Zwart, Ministry of Transport, Public Works and Water Management, DGP,
telephone: (+31) (0)70-3516472.
A more detailed version of the preliminary business plan (on which this booklet is based) can
be requested from Ms. Coëmet. The full version of the preliminary business plan contains a
detailed description of the proposed actions and a detailed account of the current state of the art
in key AVG fields.
23

Editor and production
Awareness, The Hague
Graphic design
Drupsteen + Straathof, The Hague
A-twee, Waddinxveen
Pictures/illustrations
p.4/5: Gerald Stone, PATH
p.6: Combi-Road
p.8/9: Amsterdam Airport Schiphol
p.9: Bill Stone, PATH
p.11: Prometheus / Porsche
p.12/13: Chauffeur project
p.15/16/17: AVV / Drupsteen + Straathof
p.21: Bureau DST
May 1998
-4

This is a publication of the DutchMinistry of Transport, Public Worksand Water Managementin cooperation with:
R»G
SM OII
xP.RAlL
University of Groningen, Centre forEnvironmental and Traffic Psychology
Institute for Road Safety Research SWOV
The Netherlands Research School forTransport, Infrastructure and Logistics
T M * Netherlands Organisation forApplied Scientific Research