4 castellano 2015-facas-latencydc.exa.unrc.edu.ar/facas2015/sites/default/files/ezequiel... ·...
TRANSCRIPT

Discretely FasterImproving Controller Latency in Discrete Controller
Synthesis
Ezequiel Castellano Universidad de Buenos Aires, Argentina
in collaboration with V. Braberman, N. D’Ippolito, S. Uchitel,
Controller Synthesis Problem
E || xi ⊨ G
x1,x2,x3,x4,…,xn-1,xn

Motivating Example Possible Solutions
Robot 1
Robot 2
Position A
Position B
Flying Area 1
Flying Area 2

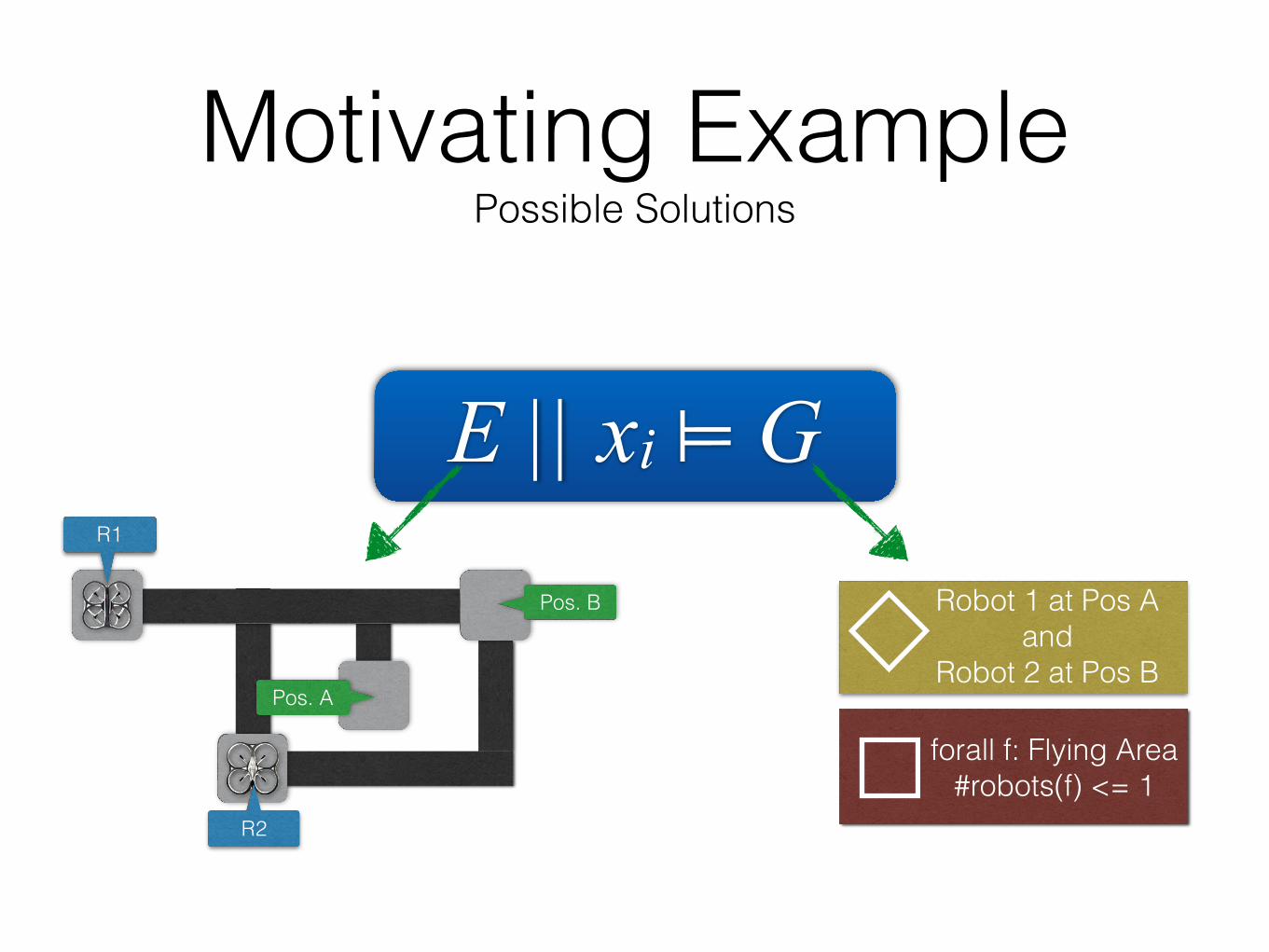
Motivating Example Possible Solutions
E || xi ⊨ GR1
R2
Pos. A
Pos. BR1
R2Pos. A
Pos. B
Motivating Example Possible Solutions
E || xi ⊨ GR1
R2
Pos. A
Pos. B Robot 1 at Pos A and
Robot 2 at Pos B
forall f: Flying Area #robots(f) <= 1

Motivating Example Possible Solutions
E || xi ⊨ G
R1
R2Pos. A
Pos. B
R1
R2Pos. A
Pos. B
R1
R2Pos. A
Pos. B
T = R2toB + R1toAR1
R2Pos. A
Pos. B
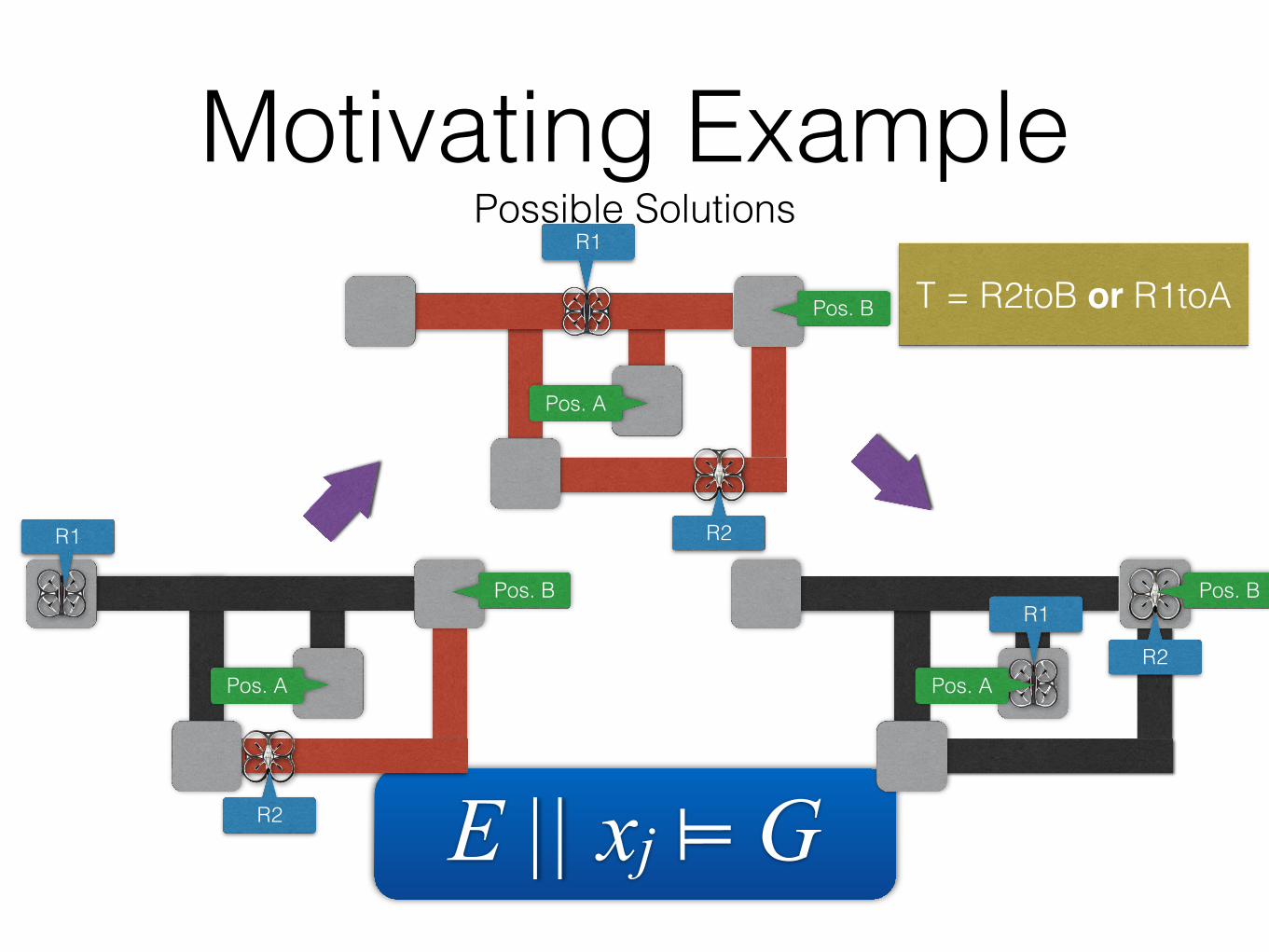
Motivating Example Possible Solutions
E || xj ⊨ G
R1
R2Pos. A
Pos. B
T = R2toB or R1toA
R1
R2
Pos. A
Pos. B
R1
R2
Pos. A
Pos. B

Hard Goals vs Soft GoalsMove R1 to A and R2 to B
avoiding crashes
forall f: Flying Area#robots(f) <= 1
R1 at Pos Aand
R2 at Pos B
Move R1 to A Move R2 to B
Move R2 (FA2) to B
Air Trafic Control
Robot 1 Move R2 (FA1) to B
Robot 2
Lower Latency
+ -
sR1.a1.pA eR1.a1.pA
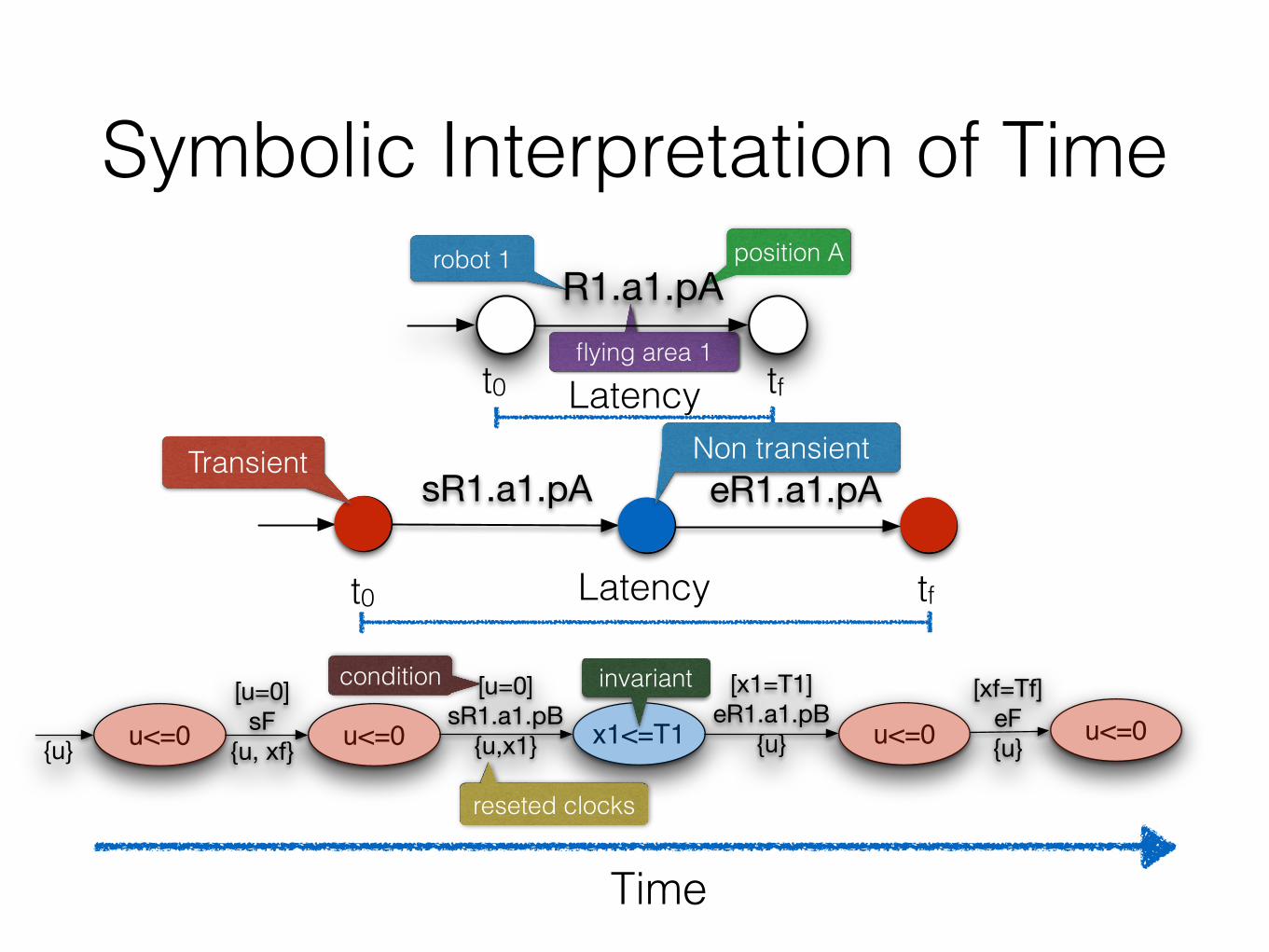
Symbolic Interpretation of Time
u<=0
[u=0]sR1.a1.pB
{u,x1}
[x1=T1]eR1.a1.pB
{u}x1<=T1 u<=0{u} u<=0
[u=0]sR1.a1.pB
{u,x1}
[x1=T1]eR1.a1.pB
{u}x1<=T1 u<=0u<=0[u=0]
sF{u, xf}
u<=0[xf=Tf]
eF{u}{u}
Time
Latencyt0 tf
Latencyt0 tf
Non transient Transient
robot 1
flying area 1
position AR1.a1.pA
reseted clocks
condition invariant

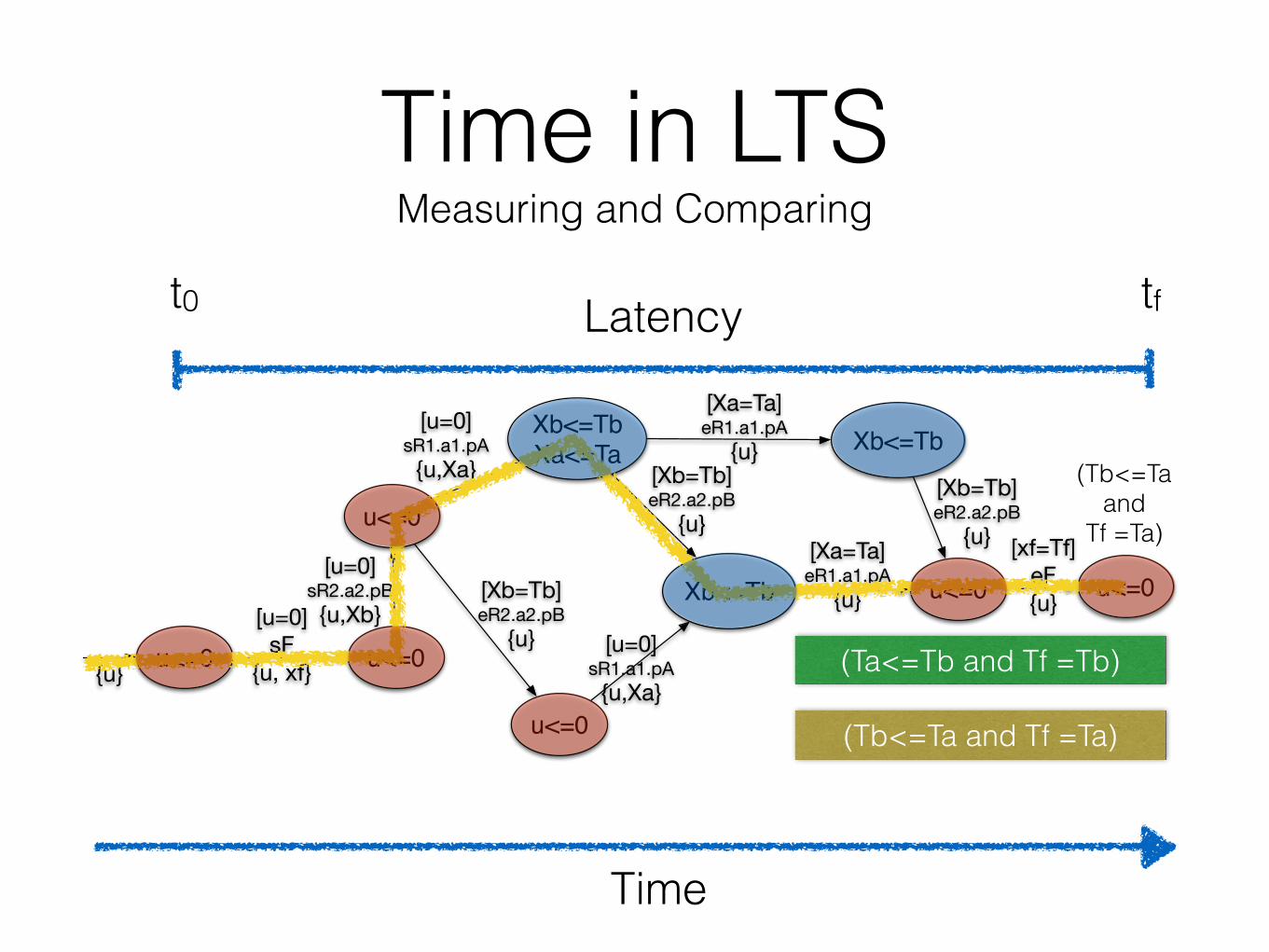
Time in LTS Measuring and Comparing
Time
Latencyt0 tf
u<=0
[Xa=Ta]eR1.a1.pA
{u}[u=0]
sR2.a2.pB{u,Xb}
[u=0]sR1.a1.pA{u,Xa}
[Xb=Tb]eR2.a2.pB
{u}
u<=0
Xb<=TbXa<=Ta
u<=0
Xb<=Tb
[Xb=Tb]eR2.a2.pB
{u}
Xb<=Tb
[Xb=Tb]eR2.a2.pB
{u}
[u=0]sR1.a1.pA{u,Xa}
[Xa=Ta]eR1.a1.pA
{u}
u<=0
u<=0
u<=0[u=0]
sF{u, xf}{u}
[xf=Tf]eF{u}
Transient
Non transient

Time in LTS Measuring and Comparing
Time
Latencyt0 tf
u<=0
[Xa=Ta]eR1.a1.pA
{u}[u=0]
sR2.a2.pB{u,Xb}
[u=0]sR1.a1.pA{u,Xa}
[Xb=Tb]eR2.a2.pB
{u}
u<=0
Xb<=TbXa<=Ta
u<=0
Xb<=Tb
[Xb=Tb]eR2.a2.pB
{u}
Xb<=Tb
[Xb=Tb]eR2.a2.pB
{u}
[u=0]sR1.a1.pA{u,Xa}
[Xa=Ta]eR1.a1.pA
{u}
u<=0
u<=0
u<=0[u=0]
sF{u, xf}{u}
[xf=Tf]eF{u}
(Ta<=Tb and
Tf =Tb)
(Ta<=Tb and Tf =Tb)
Time in LTS Measuring and Comparing
Time
Latencyt0 tf
u<=0
[Xa=Ta]eR1.a1.pA
{u}[u=0]
sR2.a2.pB{u,Xb}
[u=0]sR1.a1.pA{u,Xa}
[Xb=Tb]eR2.a2.pB
{u}
u<=0
Xb<=TbXa<=Ta
u<=0
Xb<=Tb
[Xb=Tb]eR2.a2.pB
{u}
Xb<=Tb
[Xb=Tb]eR2.a2.pB
{u}
[u=0]sR1.a1.pA{u,Xa}
[Xa=Ta]eR1.a1.pA
{u}
u<=0
u<=0
u<=0[u=0]
sF{u, xf}{u}
[xf=Tf]eF{u}
(Tb<=Ta and
Tf =Ta)
(Ta<=Tb and Tf =Tb)
(Tb<=Ta and Tf =Ta)
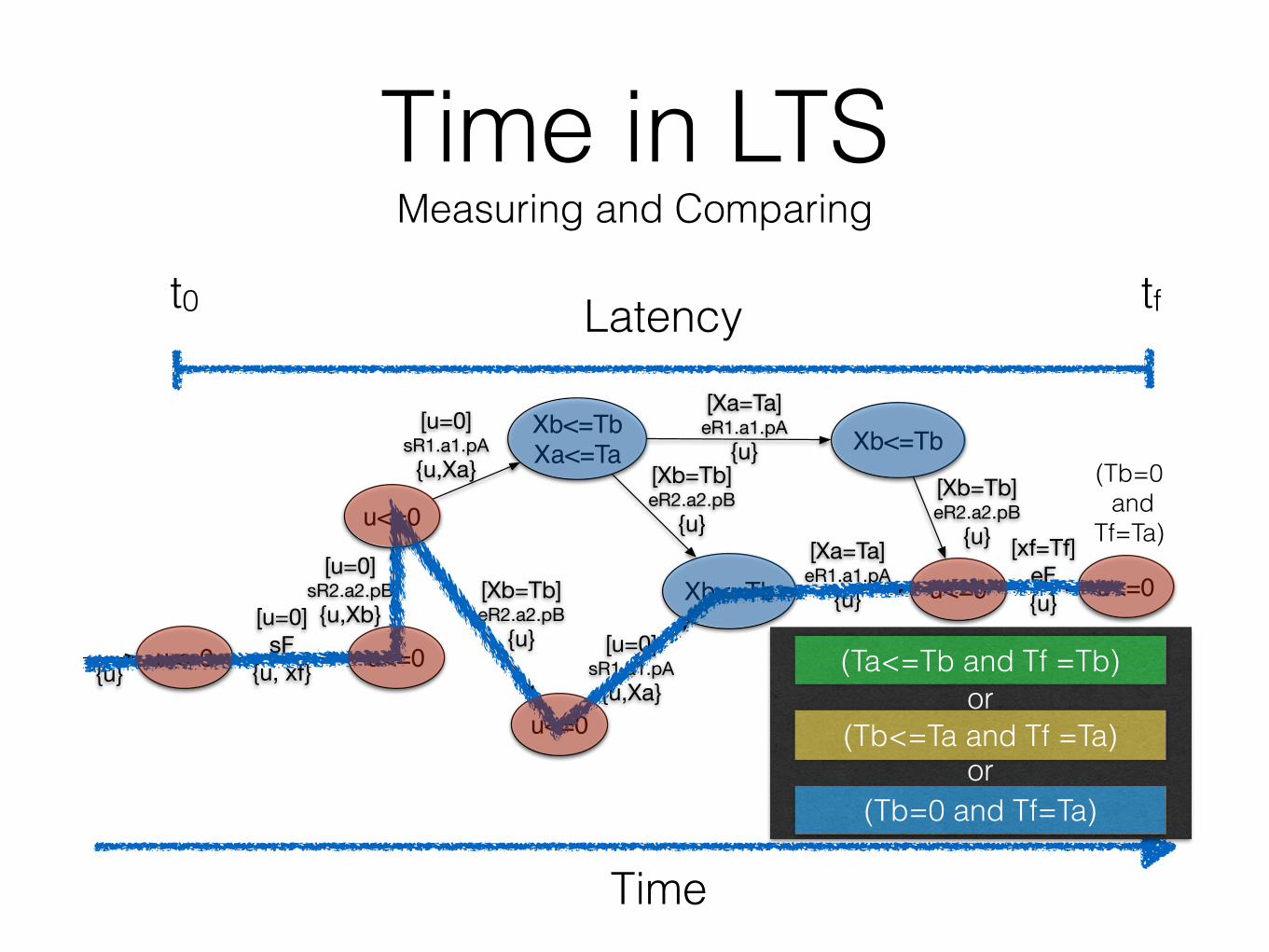
Time in LTS Measuring and Comparing
Time
Latencyt0 tf
u<=0
[Xa=Ta]eR1.a1.pA
{u}[u=0]
sR2.a2.pB{u,Xb}
[u=0]sR1.a1.pA{u,Xa}
[Xb=Tb]eR2.a2.pB
{u}
u<=0
Xb<=TbXa<=Ta
u<=0
Xb<=Tb
[Xb=Tb]eR2.a2.pB
{u}
Xb<=Tb
[Xb=Tb]eR2.a2.pB
{u}
[u=0]sR1.a1.pA{u,Xa}
[Xa=Ta]eR1.a1.pA
{u}
u<=0
u<=0
u<=0[u=0]
sF{u, xf}{u}
[xf=Tf]eF{u}
(Ta<=Tb and Tf =Tb) or
(Tb<=Ta and Tf=Ta) or
(Tb=0 and Tf=Ta)
(Tb=0 and
Tf=Ta)
(Ta<=Tb and Tf =Tb)
(Tb<=Ta and Tf =Ta)
(Tb=0 and Tf=Ta)
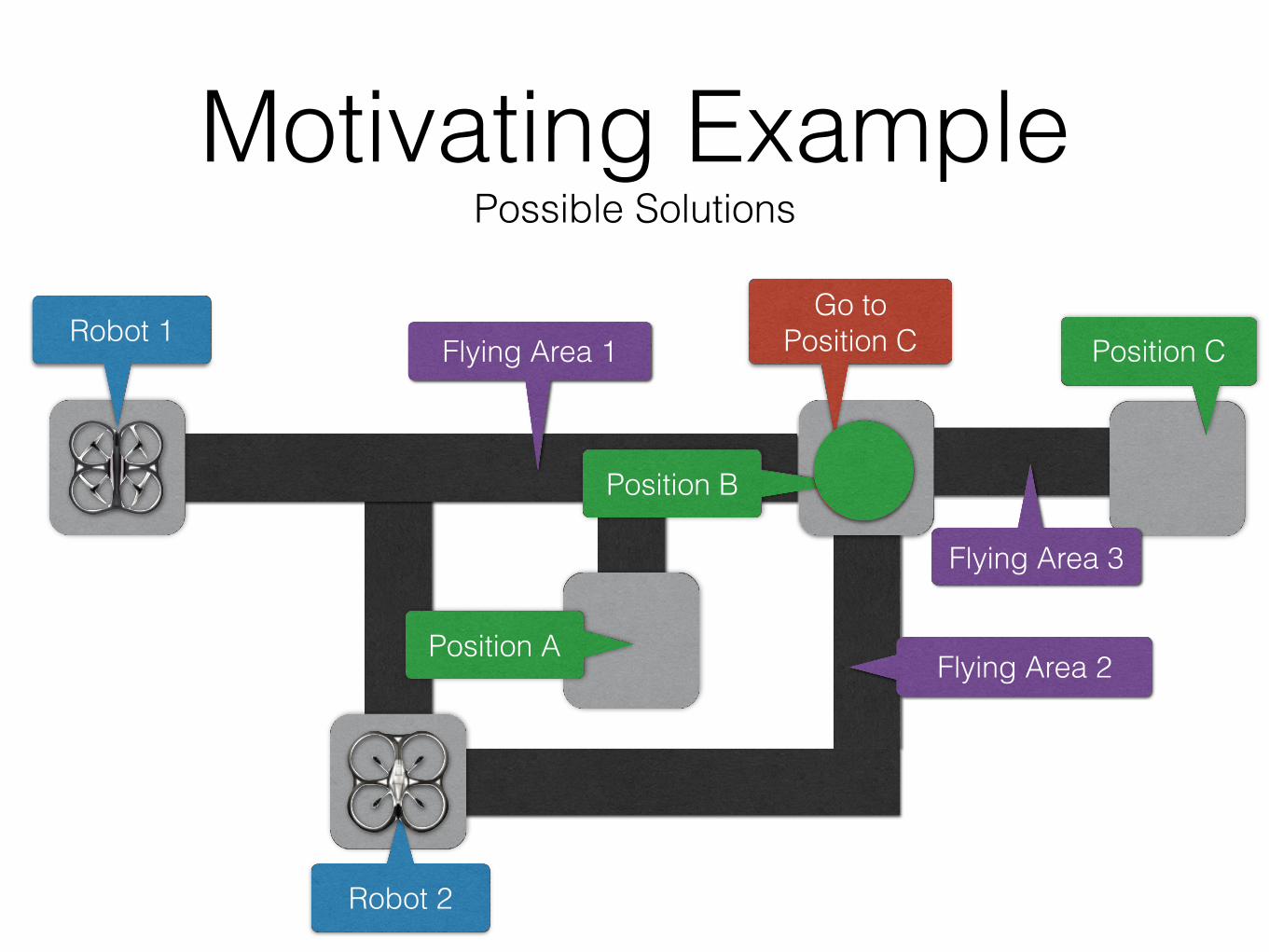
Robot 1
Robot 2
Position A
Flying Area 3
Motivating Example Possible Solutions
Flying Area 1
Flying Area 2
Position CGo to
Position C
Position B
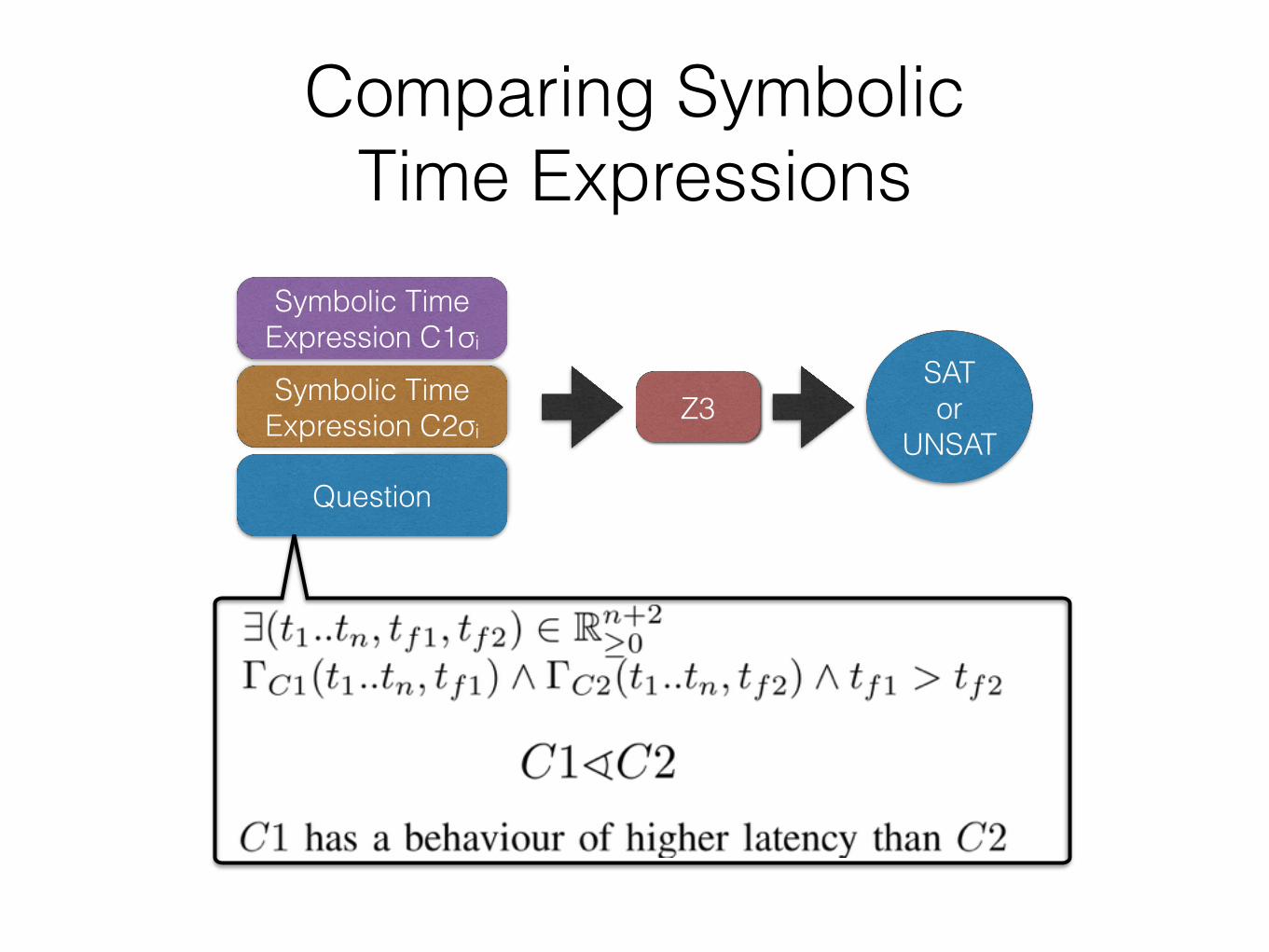
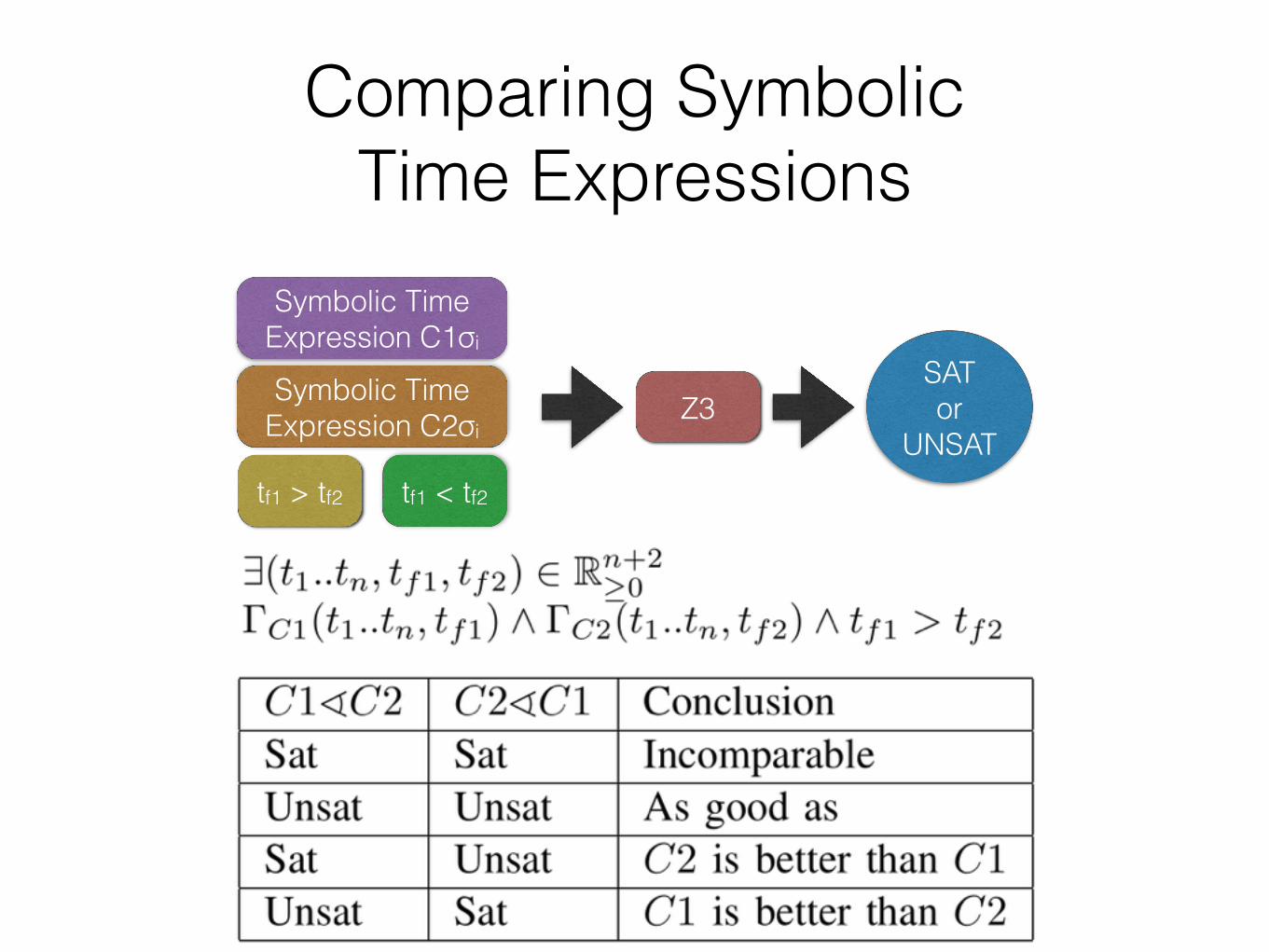
Comparing Symbolic Time Expressions
SAT or
UNSATZ3
Symbolic Time Expression C1σi Symbolic Time
Expression C2σi
tf1 > tf2 tf1 < tf2Question
Comparing Symbolic Time Expressions
SAT or
UNSATZ3
Symbolic Time Expression C1σi Symbolic Time
Expression C2σi
tf1 > tf2 tf1 < tf2
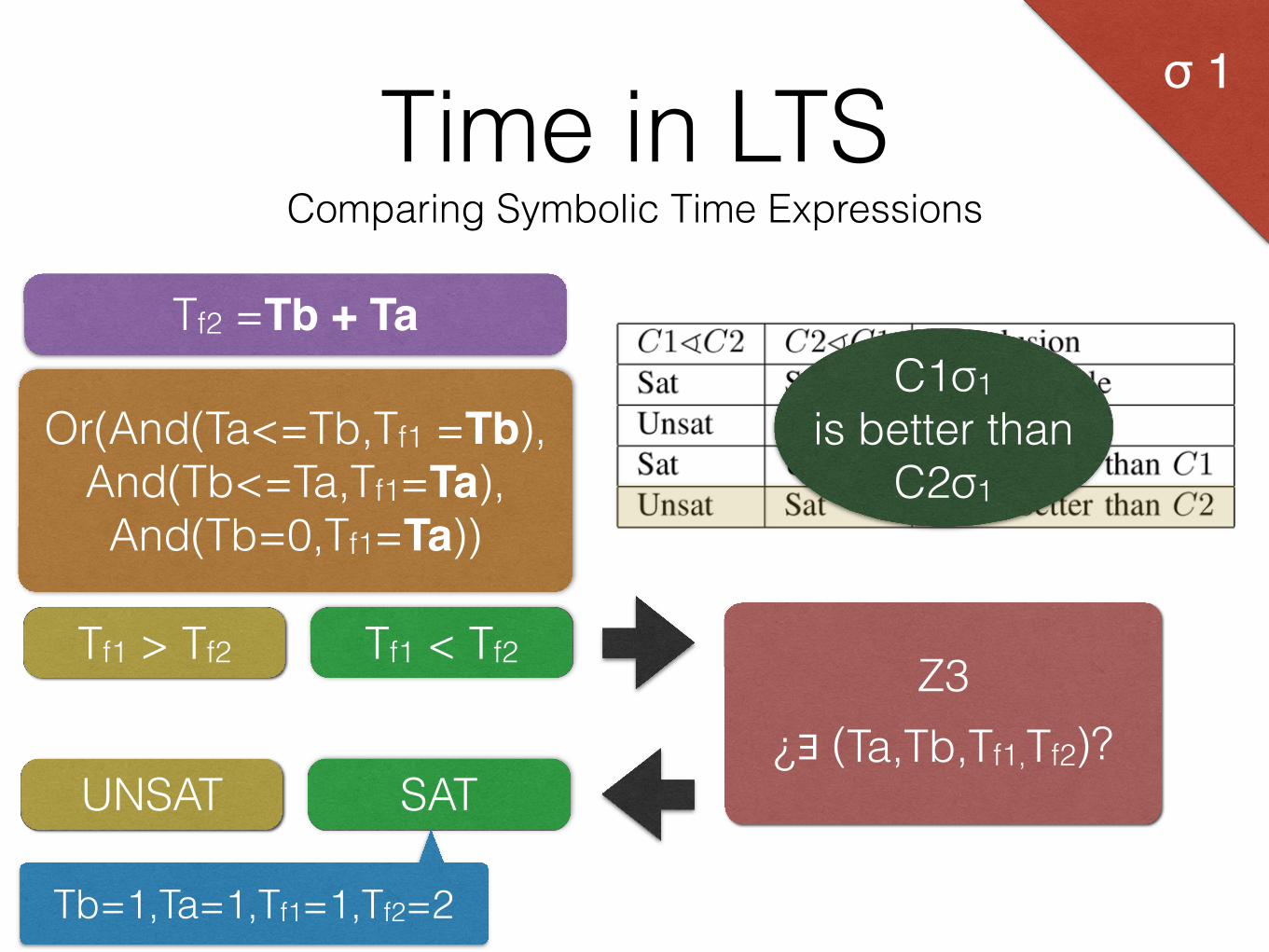
Time in LTS Comparing Symbolic Time Expressions
Tf2 =Tb + Ta
Or(And(Ta<=Tb,Tf1 =Tb), And(Tb<=Ta,Tf1=Ta), And(Tb=0,Tf1=Ta))
Tf1 > Tf2 Tf1 < Tf2 Z3 ¿∃ (Ta,Tb,Tf1,Tf2)?
UNSAT SAT
Tb=1,Ta=1,Tf1=1,Tf2=2
σ 1
C1σ1 is better than
C2σ1

Time in LTS Comparing Symbolic Time Expressions
Or(And(Tc <=Ta,Tf2=Ta + Tb + Tc), And(Ta <=Tc,Tf2=Ta + Tb + Tc),
And(Tb=0,Tf2=Ta + Tc), And(Tc=0,Tf2 =Ta + Tb))
Or(And(Tb=Ta,Tf1=Tb+Tc), And(Tb=0,Ta<=Tc,Tf1=Tc),
And(Tb+Tc<=Ta,Tf1=Ta),And(Tb=0,Ta=0,Tf1=Tc), And(Tb=0,Tc<=Ta,Tf1=Ta), And(Tb=0,Tc=0,Tf1=Ta),
And(Ta<=Tb+Tc,Tf1=Tb+Tc))
C1σ2 is better than
C2σ2
Tf1 > Tf2 Tf1 < Tf2 Z3 ¿∃ (Ta,Tb,Tc,Tf1,Tf2)? UNSAT SAT
Tc=1,Tb=1,Ta=1,Tf1=2,Tf2=3
σ 2
C1 is better than
C2

Cost of Comparing• Existential in the Symbolic Expressions
• Generate all,
- the solutions for the problem
- the schedulers
• Comparison between two expressions

Heuristics
• Minimise controller’s waits
- Non-transient states
• Maximise concurrency
- Fluents representing each activities

Where we are?• Parametric timed interpretation of LTS
• Comparison of the symbolic metric
• Heuristics to produce lower-latency controllers
- Minimise controllers wait
- Maximise concurrency

Future Work

Future Work• Support for wider range of
- hard goals (e.g. SGR(1))
- soft goals (e.g. throughput)
• Improve activities time information
- Heuristics
- Comparison
• Explore the space of the solutions
- Controllers
- Schedulers
• Multiple preferences
- Priorities
Muchas gracias