3d real time visualisation in a rich internet application · 3d real time visualisation in a rich...
TRANSCRIPT

Atos, Atos and fish symbol, Atos Origin and fish symbol, Atos Consulting, and the fish symbol itself are registered trademarks of Atos Origin SA.© 2006 Atos Origin. Private for the client. This report or any part of it, may not be copied, circulated, quoted without prior written approval from Atos Origin or the client.
3D Real Time Visualisation in a Rich Internet Application
Fabien CELLIER
Décembre 2010
3D Real Time Visualisation in a Rich Internet Application
Atos Wordline : Aurélien Barbier-AccaryGeomod – Liris : Raphaëlle ChaineGeomod – Liris : Pierre-Marie Gandoin

2 - Référence FichierAn Atos Origin
TM
Company
Table of Contents
1. Context1. Atos targets2. Research goals3. Technologies
2. State of the art1. Bdam2. C-Bdam3. Hu/Hoppe
3. Observations and solutions1. Quadric error metric2. Octree and QEM3. Semi parallelized framework
3 - Référence FichierAn Atos Origin
TM
Company
ContextAtos targets
Geographic Information System Software based on web browser
Multi platform OS Architecture (PC, netbooks,
smartphones…)
For the next Geoportail 30 000 users simultaneously Interoperability and compatibility OGC's
standards(Open Geospatial Consortium)

4 - Référence FichierAn Atos Origin
TM
Company
ContextResearch Goals
Limited bandwidth
Heavy load on servers
Heterogeneous clients (software)
Data compression
Solution scalability
Algorithm efficiency for visualization

5 An Atos OriginTM Company
ContextTechnologies
● HTML5 and WebGL: ● Small javascript OS embedded in browser
– Thread → worker
– Filesystem → localStorage
– Network → websocket (ajax evolution)
– Display → canvas (2d/3d)
● API for using GPU directly
● Compatibility with large number of devices (nexus one, N900, iPhone...)
● Poor performance with the CPU (javascript : 1700 times slower than GPU for convolution on pictures)

6 An Atos OriginTM Company
ContextTechnologies
Parallelization with GPU :
4/8/16 cores 512 cores1 global cache 1 cache per group of core

7 An Atos OriginTM Company
ContextTechnologies
● CPU: parallelization on models : one thread for simplification, one thread for display...
● GPU : parallelization on data
● Example (OpenCL) : Adding two arrays in a third
__kernel void part1(__global float* a, __global float* b, __global float* c)
{
unsigned int i = get_global_id(0); // returns thread id
c[i] = a[i] + b[i];
}
● __kernel Part1 is launched with one « thread » per array element
(ratio element/thread is configured by user)

8 - Référence FichierAn Atos Origin
TM
Company
Table of Contents
1. Context1. Atos targets2. Research goals3. Technologies
2. State of the art1. Bdam2. C-Bdam3. Hu/Hoppe
3. Observations and solutions1. Quadric error metric2. Octree and QEM3. Semi parallelized framework

9 - Référence FichierAn Atos Origin
TM
Company
State of the artBdam (P. Cignoni et al.)
Binary tree segmentation
Localization based on triangular patch
One patch has many points Irregular triangulation in patches Regular triangulation on borders (points
which are shared by patches)
Constraints in the tree to avoid « cracks »
10 - Référence FichierAn Atos Origin
TM
Company
State of the artBdam (P. Cignoni et al.)
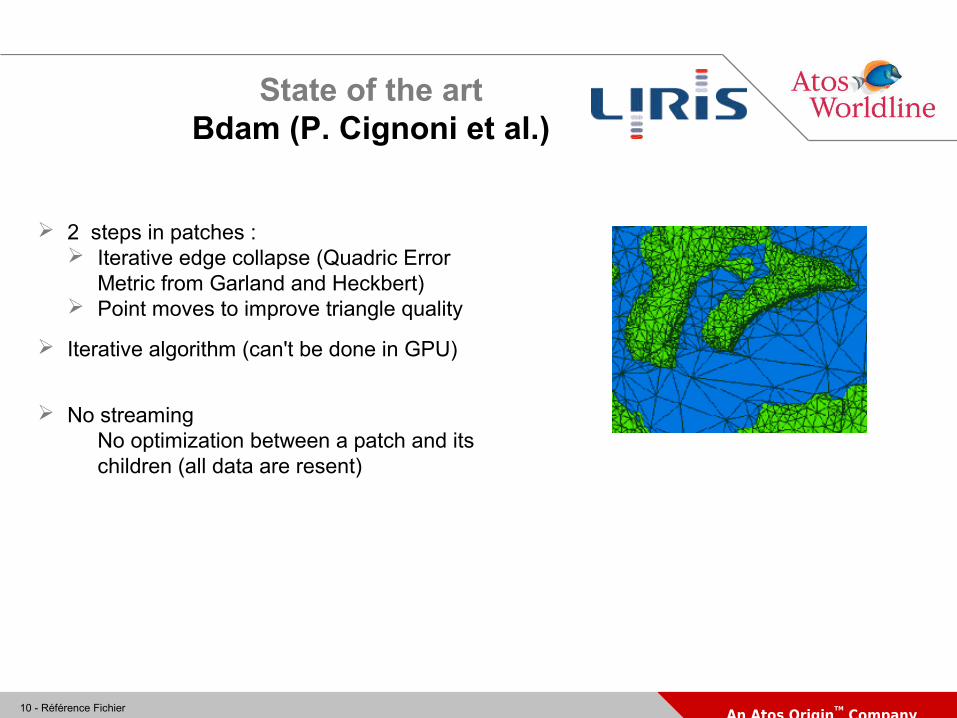
2 steps in patches : Iterative edge collapse (Quadric Error
Metric from Garland and Heckbert) Point moves to improve triangle quality
Iterative algorithm (can't be done in GPU)
No streamingNo optimization between a patch and its children (all data are resent)

11 - Référence FichierAn Atos Origin
TM
Company
State of the artBdam (P. Cignoni et al.)
Could handle 3d models (not in the paper)
Each couple of patches is independent (and can be computed independently)

12 - Référence FichierAn Atos Origin
TM
Company
State of the artC-Bdam (E. Gobbetti et al.)
Same patch principle with the same constraints for the binary tree
But regular grid in each patch
Using wavelet to compress data

13 - Référence FichierAn Atos Origin
TM
Company
State of the artC-Bdam (E. Gobbetti et al.)
Straightforward and efficient : Regular grids Integer wavelet (Neuville filter)
Can be done in GPU
No metric for global error (in the paper, L∞
or L2)
→ Need to use a zeroTree
Can only be used on landscape → Neuville filter is not efficient for buildings or other 3d objects
14 - Référence FichierAn Atos Origin
TM
Company
State of the artView Dependent Level Of Detail
L. Hu and H. Hoppe

15 - Référence FichierAn Atos Origin
TM
Company
State of the artView Dependent Level Of Detail
L. Hu and H. Hoppe
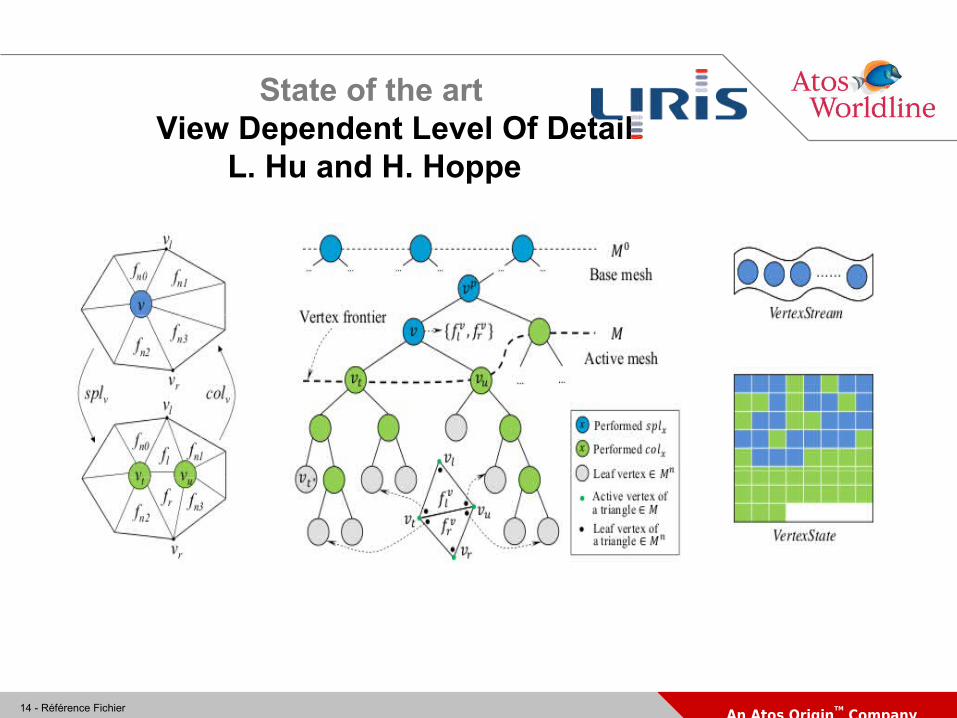
Vertex fusion/split
Hierarchy (Vt and Vu exist only if Vl and Vr exist)
Use energy criterion for minimization : Erep = energy associated to points
(Erep decreases with the number of vertices) Ep = vertex error (distance to the original vertices
which generated it by fusion, with L2 norm)
Edist = sum (Ep) : model error Espring = sum (||vi-vj||²)
(adjacent vertices error to avoid thin triangles)
E=Espring+Edist+Erep

16 - Référence FichierAn Atos Origin
TM
Company
State of the artView Dependent Level Of Detail
L. Hu and H. Hoppe
Simplification creates a binary tree (the collapse of 2 vertices creates a parent node)
Each node has an energy
The choice of visible nodes depends on their energy and their distance from the point of view
Not efficient for one pass decompression

17 - Référence FichierAn Atos Origin
TM
Company
State of the artView Dependent Level Of Detail
L. Hu and H. Hoppe
Vertices are in a common « simplification – display» memory
2 indices One for computation One for visualization
After n steps in simplification/decompression, index swap
The time before the next swap is predicted from the last times required to compute the n operations (to keep a good framerate)
18 - Référence FichierAn Atos Origin
TM
Company
State of the artView Dependent Level Of Detail
L. Hu and H. Hoppe
Can be used in all 3d models
Not out-of-core
Doesn't need this level of refinement for simplification (can't be used on smartphone due to hardware limitation)
No streaming:Using binary tree directly? But...• Network latency? • How can we cut the model to have only some parts?• Storage? Ressources on servers
Patches are necessary (lighweight clients) -> implies a constant number of vertices
Remark : hierarchy is implicit in patches so we don't need it anymore

19 - Référence FichierAn Atos Origin
TM
Company
Table of Contents
1. Context1. Atos targets2. Research goals3. Technologies
2. State of the art1. Bdam2. C-Bdam3. Hu/Hoppe
3. Observations and solutions1. Quadric error metric2. Octree and QEM3. Semi parallelized framework
20 - Référence FichierAn Atos Origin
TM
Company
Observations and solutionsQEM (Garland/Heckbert)
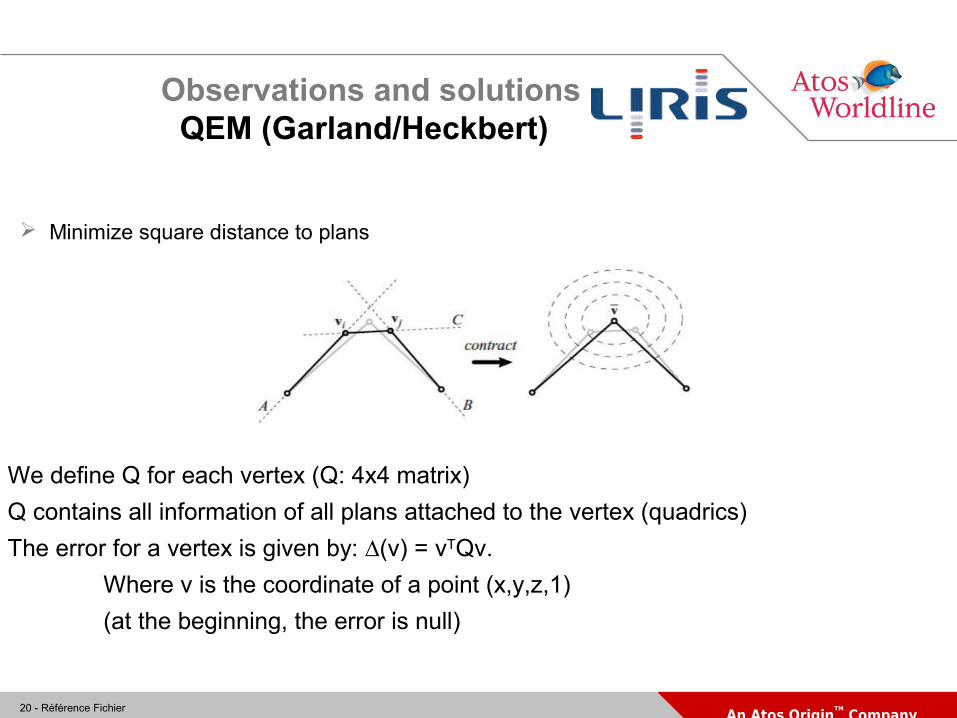
Minimize square distance to plans
We define Q for each vertex (Q: 4x4 matrix)
Q contains all information of all plans attached to the vertex (quadrics)
The error for a vertex is given by: ∆(v) = vTQv.
Where v is the coordinate of a point (x,y,z,1)
(at the beginning, the error is null)

21 - Référence FichierAn Atos Origin
TM
Company
Observations and solutionsQEM (Garland/Heckbert)
For collapse (v1, v2) → v’, one matrix Q' must be defined to associate a new error: Q’ = Q1 + Q2
We choose v' such that ∆(v') =v' TQ' v' is minimal→ v' TQ' v' = v' T (Q1+Q2) v' = v' T Q1 v'+v' T Q2 v'
so errors from Q1 and Q2 are saved

22 - Référence FichierAn Atos Origin
TM
Company
Observations and solutionsQEM and octree
Original Quadric error metric
Octree: fusion of vertices (with their associated Q) which are in the same cell; then simplification with Garland/Heckbert

23 - Référence FichierAn Atos Origin
TM
Company
Observations and solutionsQEM and octree
What is important here: Always keeps original geometry in memory Bad choice in one fusion is not important if vertices are merged a second time → only
the last choice is very influent for a given view.
We get no intermediate results for multiresolution visualization
24 - Référence FichierAn Atos Origin
TM
Company
Observations and solutionsParallelization
Our method: merging of Bdam (Cignoni) and VDLOD (Hu/Hoppe)• we keep the patches for distribution• differential coding from a patch to its children• one error per patch (QEM max from all vertices in the patch)• use QEM (quadric error metric) instead of Hoppe's metric• simplification with 3 goals :
– Constant number of vertices in a patch
– Minimize error for each vertex
– The depth of the binary tree must be limited (GPU optimization)

25 - Référence FichierAn Atos Origin
TM
Company
Observations and solutionssemi-parallelized framework
Having a total parallelism for the vertex fusion is not a good idea, because :
We need to find THE solution which minimize the global error (hard)
Some vertices must no be merged in order to keep error low
Total parallelism keeps the same vertex density everywhere

26 - Référence FichierAn Atos Origin
TM
Company
Observations and solutionssemi-parallelized framework
Vocabulary :
Fusion level n : minimal level between two vertices (in the binary tree) which will merge (cf VDLOD)
% of parallelism = % of vertices merged in each step• 100 % → 1 step (100 pts → 50pts)• 50 % → 2 steps (100 pts → 71 pts → 50 pts)
27 - Référence FichierAn Atos Origin
TM
Company
Observations and solutionssemi-parallelized framework
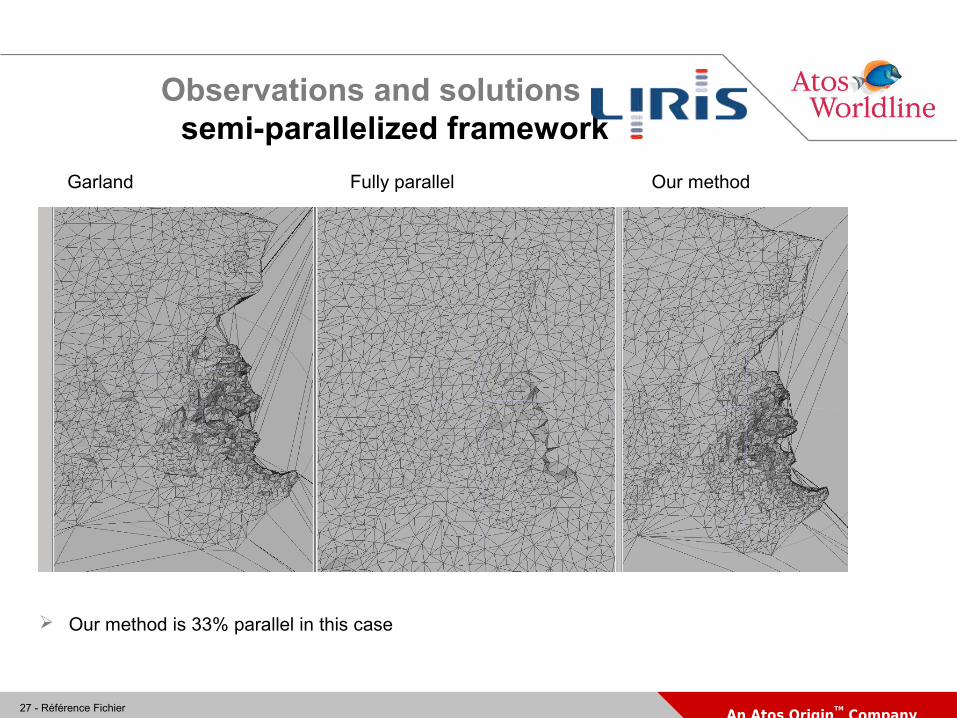
Our method is 33% parallel in this case
Garland Fully parallel Our method

28 - Référence FichierAn Atos Origin
TM
Company
Observations and solutionssemi-parallelized framework
The point of view has been chosen to show differencies
Garland (16k faces) Our method (16k faces) Original (1M faces)

29 - Référence FichierAn Atos Origin
TM
Company
Observations and solutionssemi-parallelized framework
Garland (16k faces) Our method (16k faces) Original (1M faces)

30 - Référence FichierAn Atos Origin
TM
Company
Observations and solutionssemi-parallelized framework
Garland (5k faces) Our method (5k faces) Original (1M faces)

31 - Référence FichierAn Atos Origin
TM
Company
Observations and solutionssemi-parallelized framework
Garland (2k faces) Our method (2k faces) Original (1M faces)

32 - Référence FichierAn Atos Origin
TM
Company
Observations and solutionssemi-parallelized framework
Differencies are not visible In practive we try to have at most one triangle per pixel
Garland (1000 faces) Our method (1000 faces) Original (1M faces)

33 - Référence FichierAn Atos Origin
TM
Company
Observations and solutionssemi-parallelized framework
At this stage, the number of possible choices for the fusion is too low
Garland (80 faces) Our method (80 faces) Original (1M faces)

34 - Référence FichierAn Atos Origin
TM
Company
Observations and solutionssemi-parallelized framework
Main differences with Hu/Hoppe : out-of-core becomes possible (thanks to the patches) constant number of vertices in patches → efficiency for visualization patches are important for network
Quick reconstruction (each triangle and vertex can be computed separately for visualization → GPU et HTML5 compliant)
Each step is useful for visualization (multiresolution)
Each patch can be computed independently
35 - Référence FichierAn Atos Origin
TM
Company
Conclusion
An unified method for all kind of visualizations (landscape, buildings, monuments, etc.)
Perspectives : Find an efficient way to add texture to 3d models (easy on landscape and
buildings, not for arbitrary 3d models) Find a method to predict the optimal parallelism ratio according to the
model

36 - Référence FichierAn Atos Origin
TM
Company
Questions
??
??
?
??
?
?
?
?
?