3d object recognition with convolutional neural...
TRANSCRIPT
3D Object Recognition withConvolutional Neural Networks
Autor:
Albert Garcıa Garcıa — [email protected]
Supervisores:
Jorge Pomares Baeza — [email protected]
Jose Garcıa Rodrıguez — [email protected]
2016/06/06
Universidad de Alicante
Master en Automatica y Robotica
Indice
1. Introduccion
2. Marco Teorico
3. Representaciones Volumetricas
4. Red Neuronal Convolucional para Reconocimiento de Objetos
5. Conclusion
1
Introduccion
Motivacion: SIRMAVED
3
Introduccion y Objetivos
• Reconocimiento de clases de objetos 3D
• Aproximacion tradicional con descriptores
• Deep Learning (aprendizaje de representaciones)
• Redes Neuronales Convolucionales
• Convolutional Neural Networks (CNNs)
• Mejoran por un amplio margen a metodos tradicionales
• Objetivos
• Analizar el marco teorico de las CNN
• Estudiar y proponer representaciones volumetricas 3D
• Disenar, implementar y testear una CNN 3D
4

Marco Teorico
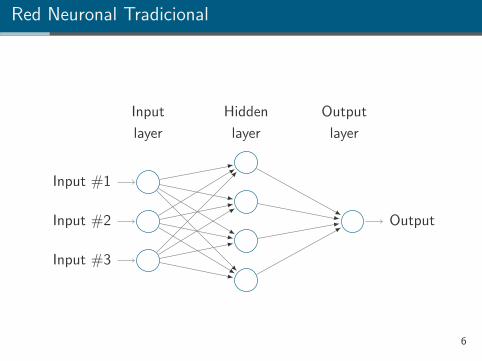
Red Neuronal Tradicional
Input #1
Input #2
Input #3
Output
Hidden
layer
Input
layer
Output
layer
6
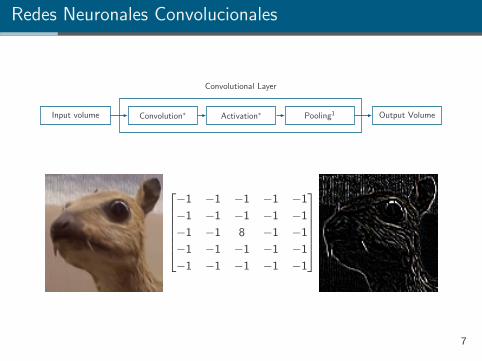
Redes Neuronales Convolucionales
Input volume Convolution∗ Activation∗ Pooling1 Output Volume
Convolutional Layer
−1 −1 −1 −1 −1
−1 −1 −1 −1 −1
−1 −1 8 −1 −1
−1 −1 −1 −1 −1
−1 −1 −1 −1 −1
7
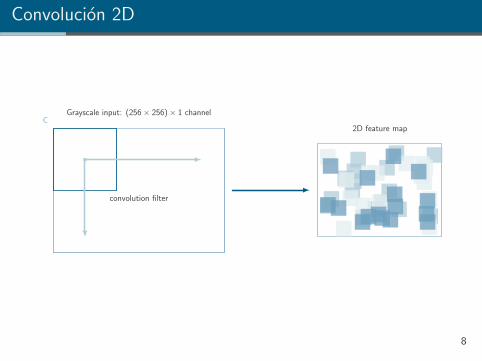
Convolucion 2D
CGrayscale input: (256 × 256) × 1 channel
2D feature map
convolution filter
8
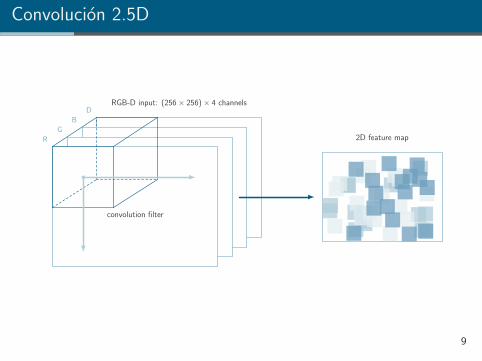
Convolucion 2.5D
R
G
B
DRGB-D input: (256 × 256) × 4 channels
2D feature map
convolution filter
9

Convolucion 3D
3D input: (256 × 64 × 32)
3D feature map
convolution filter
10

Representaciones Volumetricas
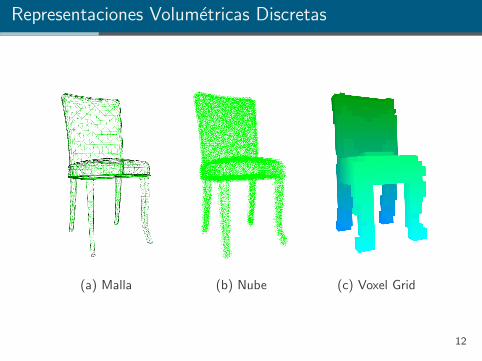
Representaciones Volumetricas Discretas
(a) Malla (b) Nube (c) Voxel Grid
12
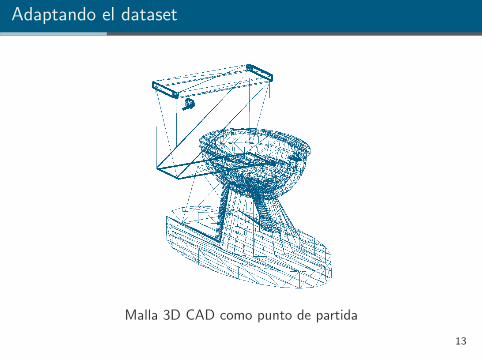
Adaptando el dataset
Malla 3D CAD como punto de partida
13
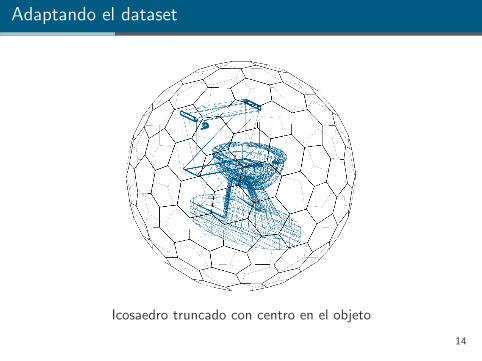
Adaptando el dataset
Icosaedro truncado con centro en el objeto
14
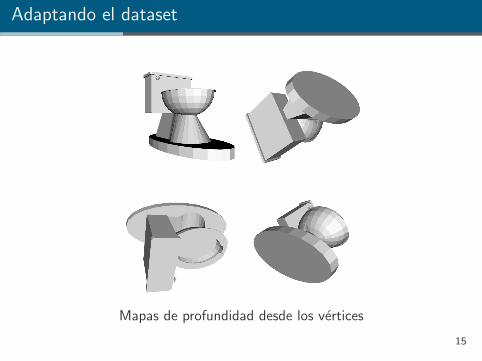
Adaptando el dataset
Mapas de profundidad desde los vertices
15
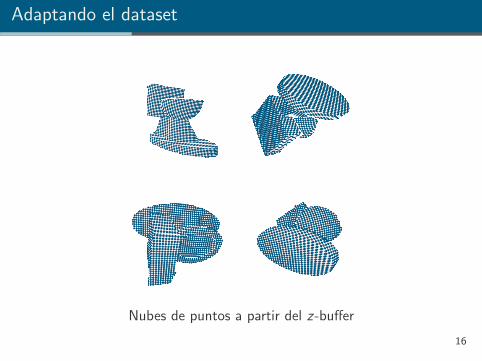
Adaptando el dataset
Nubes de puntos a partir del z-buffer
16
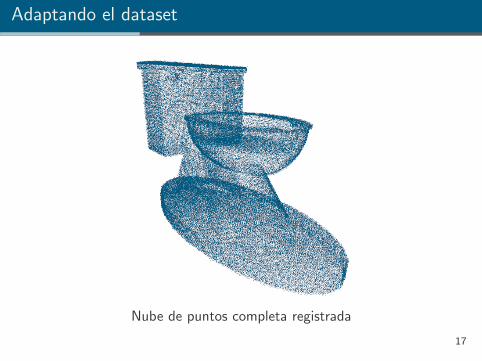
Adaptando el dataset
Nube de puntos completa registrada
17
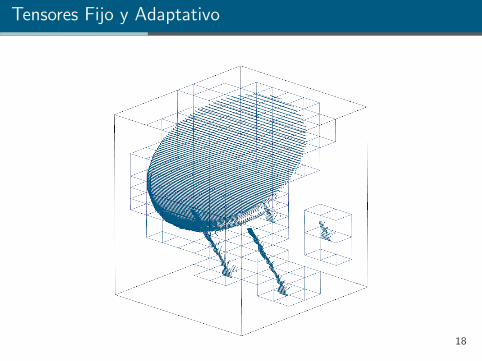
Tensores Fijo y Adaptativo
18
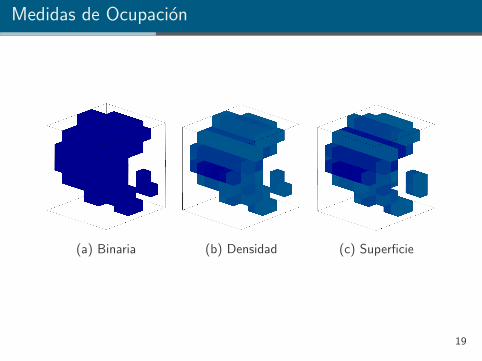
Medidas de Ocupacion
(a) Binaria (b) Densidad (c) Superficie
19
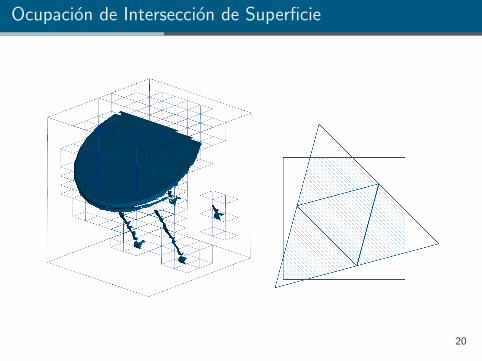
Ocupacion de Interseccion de Superficie
20
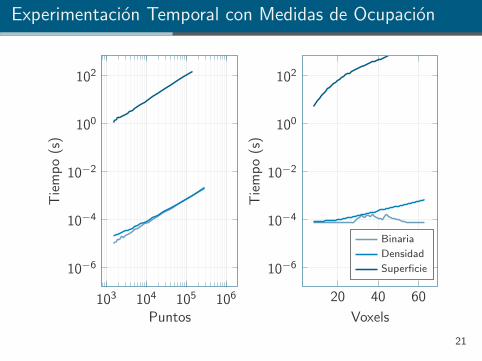
Experimentacion Temporal con Medidas de Ocupacion
103 104 105 106
10−6
10−4
10−2
100
102
Puntos
Tie
mp
o(s
)
20 40 60
10−6
10−4
10−2
100
102
Voxels
Tie
mp
o(s
)Binaria
Densidad
Superficie
21
Red Neuronal Convolucional paraReconocimiento de Objetos
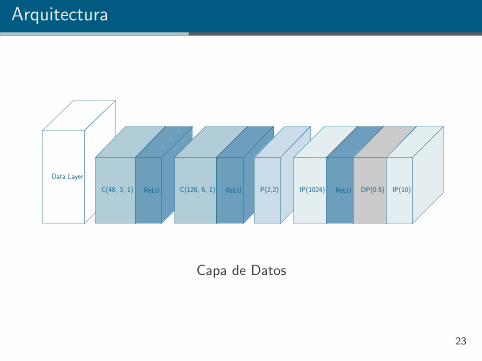
Arquitectura
Data Layer
C(48, 3, 1) ReLU C(128, 5, 1) ReLU P(2,2) IP(1024) ReLU DP(0.5) IP(10)
Capa de Datos
23
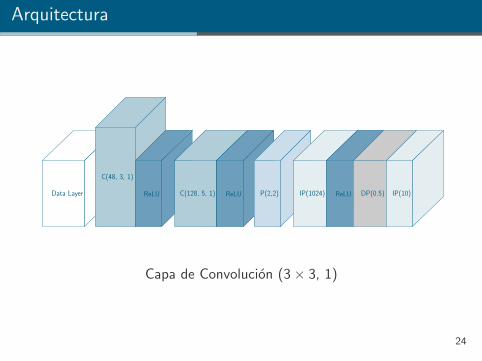
Arquitectura
Data Layer
C(48, 3, 1)
ReLU C(128, 5, 1) ReLU P(2,2) IP(1024) ReLU DP(0.5) IP(10)
Capa de Convolucion (3 × 3, 1)
24
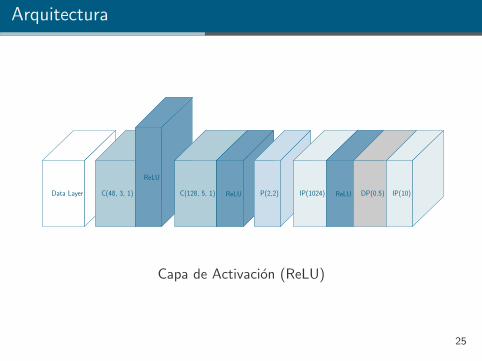
Arquitectura
Data Layer C(48, 3, 1)
ReLU
C(128, 5, 1) ReLU P(2,2) IP(1024) ReLU DP(0.5) IP(10)
Capa de Activacion (ReLU)
25
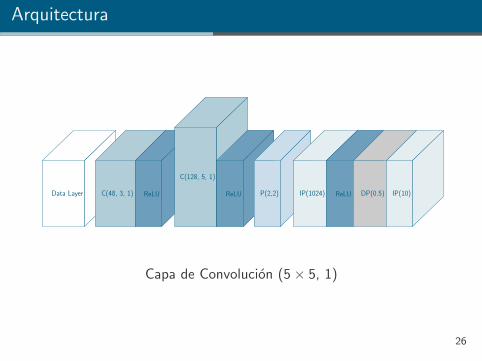
Arquitectura
Data Layer C(48, 3, 1) ReLU
C(128, 5, 1)
ReLU P(2,2) IP(1024) ReLU DP(0.5) IP(10)
Capa de Convolucion (5 × 5, 1)
26
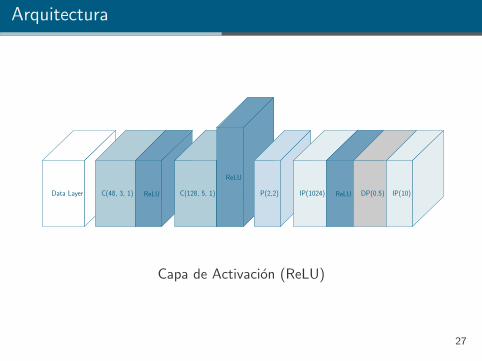
Arquitectura
Data Layer C(48, 3, 1) ReLU C(128, 5, 1)
ReLU
P(2,2) IP(1024) ReLU DP(0.5) IP(10)
Capa de Activacion (ReLU)
27
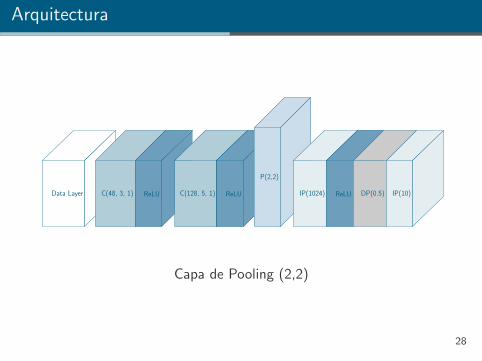
Arquitectura
Data Layer C(48, 3, 1) ReLU C(128, 5, 1) ReLU
P(2,2)
IP(1024) ReLU DP(0.5) IP(10)
Capa de Pooling (2,2)
28
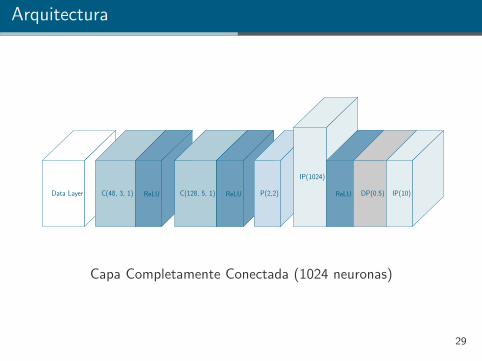
Arquitectura
Data Layer C(48, 3, 1) ReLU C(128, 5, 1) ReLU P(2,2)
IP(1024)
ReLU DP(0.5) IP(10)
Capa Completamente Conectada (1024 neuronas)
29
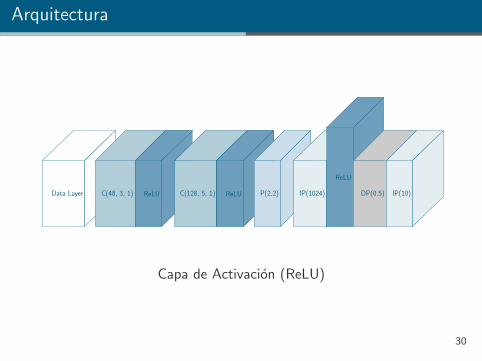
Arquitectura
Data Layer C(48, 3, 1) ReLU C(128, 5, 1) ReLU P(2,2) IP(1024)
ReLU
DP(0.5) IP(10)
Capa de Activacion (ReLU)
30
Arquitectura
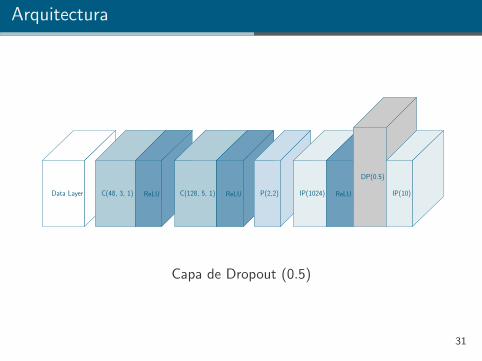
Data Layer C(48, 3, 1) ReLU C(128, 5, 1) ReLU P(2,2) IP(1024) ReLU
DP(0.5)
IP(10)
Capa de Dropout (0.5)
31
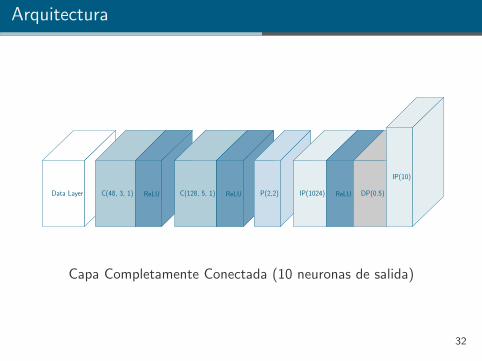
Arquitectura
Data Layer C(48, 3, 1) ReLU C(128, 5, 1) ReLU P(2,2) IP(1024) ReLU DP(0.5)
IP(10)
Capa Completamente Conectada (10 neuronas de salida)
32
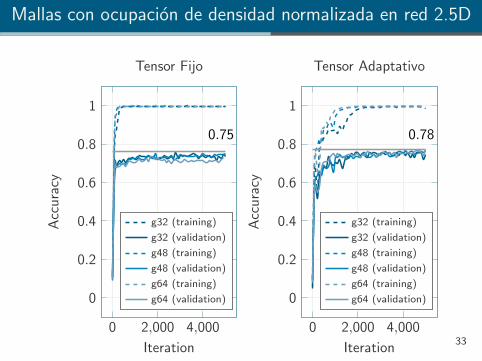
Mallas con ocupacion de densidad normalizada en red 2.5D
0 2,000 4,000
0
0.2
0.4
0.6
0.8
1
0.75
Iteration
Acc
ura
cyTensor Fijo
g32 (training)
g32 (validation)
g48 (training)
g48 (validation)
g64 (training)
g64 (validation)
0 2,000 4,000
0
0.2
0.4
0.6
0.8
1
0.78
Iteration
Acc
ura
cy
Tensor Adaptativo
g32 (training)
g32 (validation)
g48 (training)
g48 (validation)
g64 (training)
g64 (validation)
33
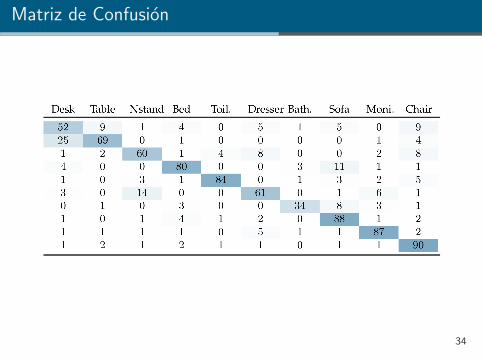
Matriz de Confusion
34
Confusiones
35
Simulacion de Ruido
36
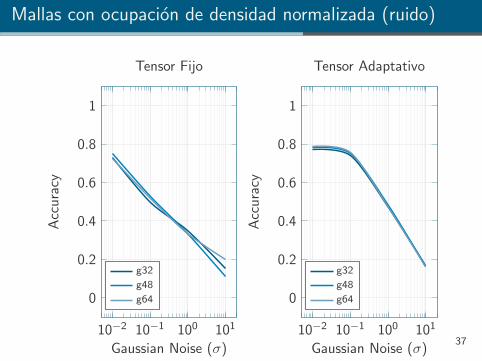
Mallas con ocupacion de densidad normalizada (ruido)
10−2 10−1 100 101
0
0.2
0.4
0.6
0.8
1
Gaussian Noise (σ)
Acc
ura
cyTensor Fijo
g32
g48
g64
10−2 10−1 100 101
0
0.2
0.4
0.6
0.8
1
Gaussian Noise (σ)
Acc
ura
cy
Tensor Adaptativo
g32
g48
g64
37
Simulacion de Oclusion
38
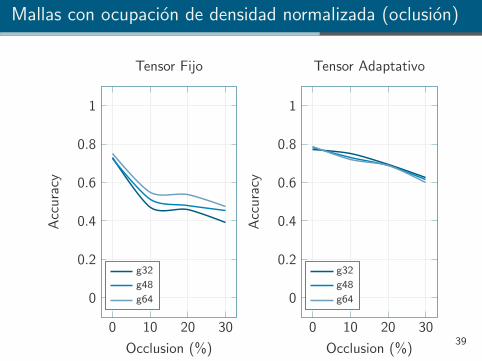
Mallas con ocupacion de densidad normalizada (oclusion)
0 10 20 30
0
0.2
0.4
0.6
0.8
1
Occlusion (%)
Acc
ura
cyTensor Fijo
g32
g48
g64
0 10 20 30
0
0.2
0.4
0.6
0.8
1
Occlusion (%)
Acc
ura
cy
Tensor Adaptativo
g32
g48
g64
39
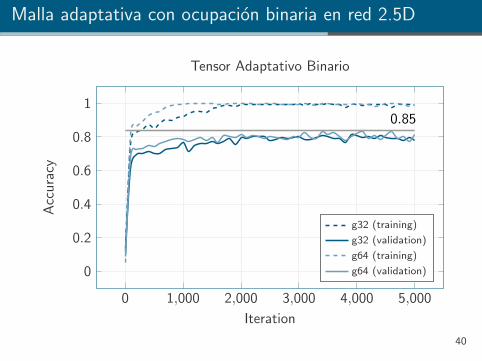
Malla adaptativa con ocupacion binaria en red 2.5D
0 1,000 2,000 3,000 4,000 5,000
0
0.2
0.4
0.6
0.8
10.85
Iteration
Acc
ura
cyTensor Adaptativo Binario
g32 (training)
g32 (validation)
g64 (training)
g64 (validation)
40
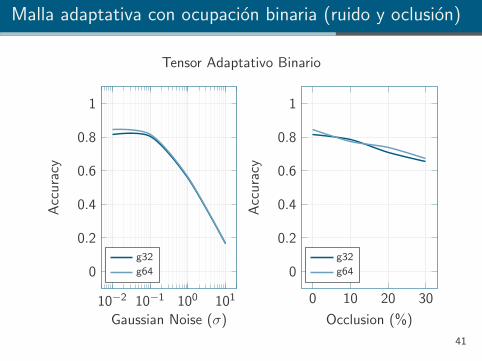
Malla adaptativa con ocupacion binaria (ruido y oclusion)
Tensor Adaptativo Binario
10−2 10−1 100 101
0
0.2
0.4
0.6
0.8
1
Gaussian Noise (σ)
Acc
ura
cy
g32
g64
0 10 20 30
0
0.2
0.4
0.6
0.8
1
Occlusion (%)
Acc
ura
cyg32
g64
41
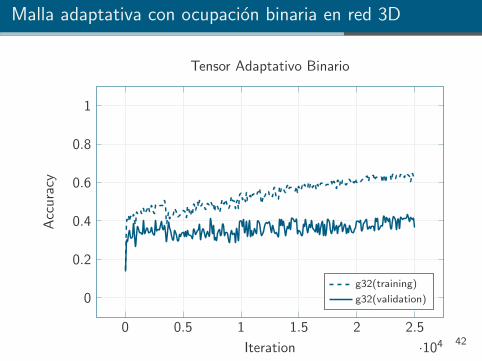
Malla adaptativa con ocupacion binaria en red 3D
0 0.5 1 1.5 2 2.5
·104
0
0.2
0.4
0.6
0.8
1
Iteration
Acc
ura
cyTensor Adaptativo Binario
g32(training)
g32(validation)
42
Conclusion
Conclusiones
• Estudio teorico sobre las Redes Neuronales Convolucionales
• Estudio sobre frameworks y datasets existentes
• Estado del arte sobre Redes Neuronales Convolucionales 3D
• Estado del arte de representaciones volumetricas
• Propuesta de representaciones volumetricas
• Propuesta de arquitecturas 2.5D y 3D
• Estudio del efecto del ruido y oclusion en las redes
• Reconocimiento de objetos 3D con un 85% de acierto
44
Colaboraciones, Publicaciones y Estancias
• Colaboracion en el proyecto nacional SIRMAVED
(DPI2013-40534-R) del Programa Estatal de I+D+i
Orientada a los Retos de la Sociedad.
• Publicacion aceptada en congreso Core A: International
Joint Conference on Neural Networks (IJCNN 2016,
Vancouver). PointNet: A 3D Convolutional Neural Network
for Real-Time Object Class Recognition.
• iV&L Net Training School 2016: Integrating Vision and
Language: Deep Learning (Malta).
45
Trabajos Futuros
• Aceleracion del calculo de representaciones con CUDA
• Propuesta de representaciones volumetricas mas adecuadas
• Control mas estricto de overfitting (aumento de dataset)
• Experimentacion exhaustiva con la red 3D
• Despliegue de la red en un sistema con escenas reales
• Identificacion de pose de los objetos
46
3D Object Recognition withConvolutional Neural Networks
Autor:
Albert Garcıa Garcıa — [email protected]
Supervisores:
Jorge Pomares Baeza — [email protected]
Jose Garcıa Rodrıguez — [email protected]
2016/06/06
Universidad de Alicante
Master en Automatica y Robotica
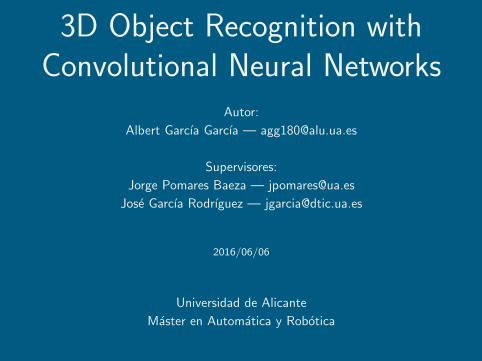
Capa de Convolucion
input
hidden layer
47
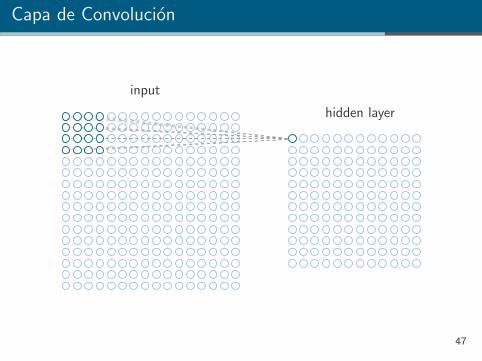
Capa de Convolucion
input
hidden layer
48
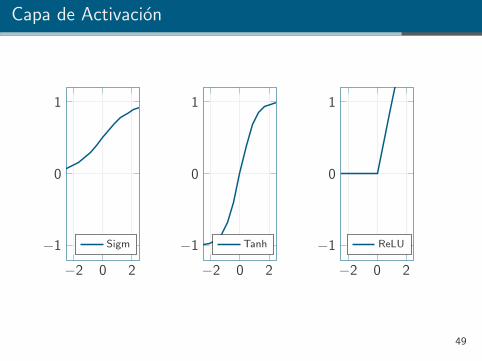
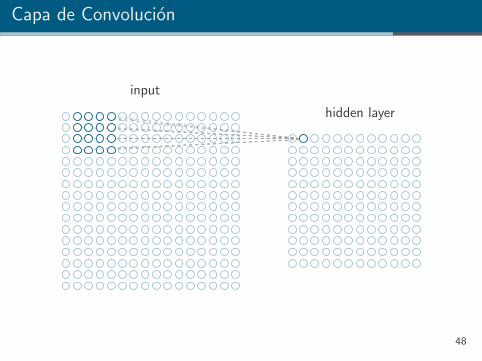
Capa de Activacion
−2 0 2
−1
0
1
Sigm
−2 0 2
−1
0
1
Tanh
−2 0 2
−1
0
1
ReLU
49
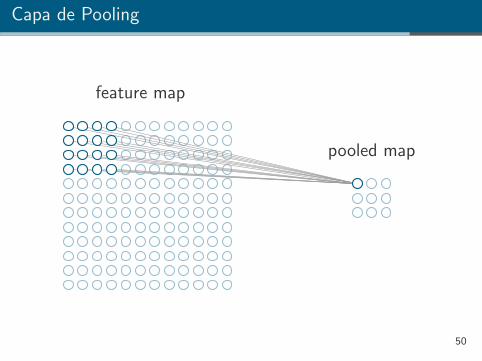
Capa de Pooling
feature map
pooled map
50
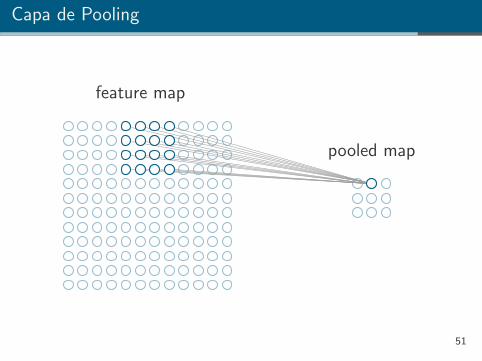
Capa de Pooling
feature map
pooled map
51

Software
52
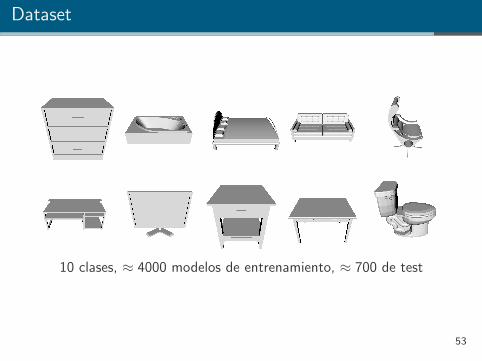
Dataset
10 clases, ≈ 4000 modelos de entrenamiento, ≈ 700 de test
53
Hardware
54
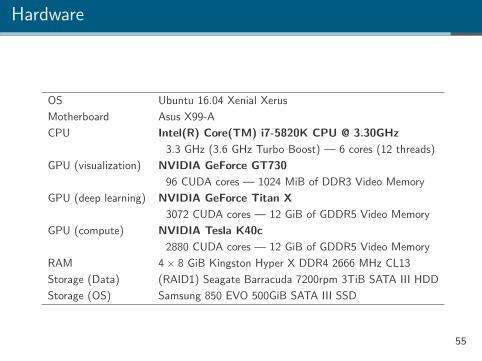
Hardware
OS Ubuntu 16.04 Xenial Xerus
Motherboard Asus X99-A
CPU Intel(R) Core(TM) i7-5820K CPU @ 3.30GHz
3.3 GHz (3.6 GHz Turbo Boost) — 6 cores (12 threads)
GPU (visualization) NVIDIA GeForce GT730
96 CUDA cores — 1024 MiB of DDR3 Video Memory
GPU (deep learning) NVIDIA GeForce Titan X
3072 CUDA cores — 12 GiB of GDDR5 Video Memory
GPU (compute) NVIDIA Tesla K40c
2880 CUDA cores — 12 GiB of GDDR5 Video Memory
RAM 4 × 8 GiB Kingston Hyper X DDR4 2666 MHz CL13
Storage (Data) (RAID1) Seagate Barracuda 7200rpm 3TiB SATA III HDD
Storage (OS) Samsung 850 EVO 500GiB SATA III SSD
55
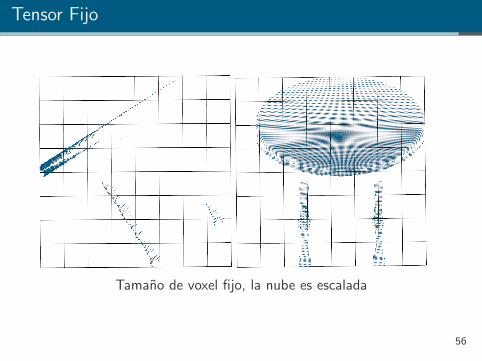
Tensor Fijo
Tamano de voxel fijo, la nube es escalada
56
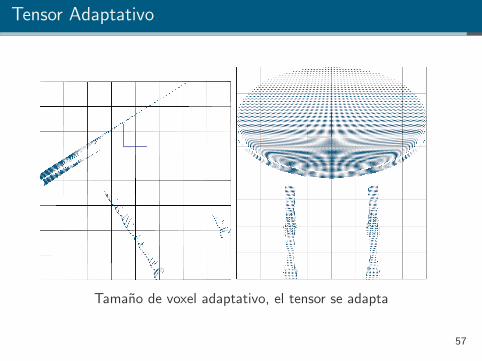
Tensor Adaptativo
Tamano de voxel adaptativo, el tensor se adapta
57
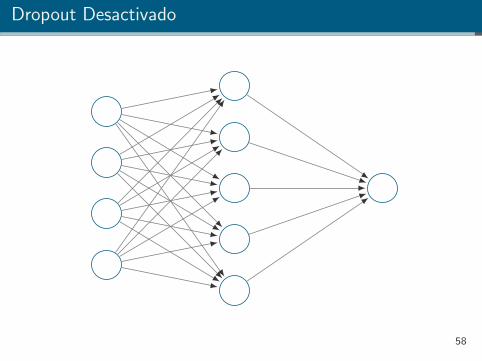
Dropout Desactivado
58
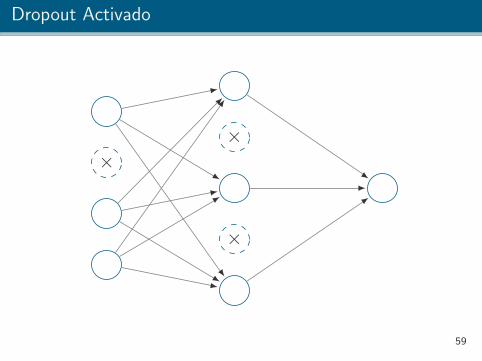
Dropout Activado
××
×
59