34962197 analisis de lineal id ad tanque conico
TRANSCRIPT

7/30/2019 34962197 Analisis de Lineal Id Ad Tanque Conico
http://slidepdf.com/reader/full/34962197-analisis-de-lineal-id-ad-tanque-conico 1/6
Análisis de linealidad tanque cónicoJairo Vargas Caleño
Resumen: en este articulo se presenta el
análisis de linealidad de un tanque
cónico; el objetivo consiste en analizar y
verificar la respuesta del sistema así
como realizar la identificación a través
de el algoritmo de mínimos cuadrados y
el Toolbox de Matlab® IDENT.
Palabras Clave: análisis lineal, no lineal,
estabilidad, linealización, identificación.
1. INTRODUCCION
El presente artículo muestra el proceso para elanálisis de linealidad de un sistema clásico comolo es un tanque de almacenamiento de líquido congeometría cónica. El trabajo se dividió en cincopartes principales: 1) Selección y modelamiento
matemático de la planta, 2) Prueba de linealidad,3) Linealización del modelo en un punto deoperación, 4) Identificación de un modelo delsistema empleando el toolbox Ident de Matlab y5) Conclusiones.
2. MODELO TANQUE CONICO
La Figura 1., muestra un tanque paraalmacenamiento de agua con geometría cónica[1]. La entrada de control es el flujo de entrada
(Qin) en la tubería superior del tanque.
La salida corresponde al nivel (h) de agua en eltanque.
Figura No. 1. Tanque cónico
Qin es una variable controlable y cualquier
cambio afecta de inmediato el sistema. Para elanálisis se limita el flujo de entrada en elintervalo:
0 ≤ Qin ≤ 4*10-4 m3/s. (1.0)
El caudal de salida (Qout), es no controlable y sedebe a la presión hidrostática. Se asume caudalde salida turbulento:
hk Qout out = . (1.1)
Experimentalmente se ha encontrado que
s
mk out
2/5410
−=
La altura del tanque es de 0.5 m y el ángulo alfaes de 20°. En la practica el nivel de agua puedeser determinado de forma proporcional con lapresión en el fondo del tanque.
Para el nivel h el volumen es:
hhr hV ).(.3
1)( 2
π =
(1.2)
Si se observa la Figura 1.0., se tiene que:
Pág. 1

7/30/2019 34962197 Analisis de Lineal Id Ad Tanque Conico
http://slidepdf.com/reader/full/34962197-analisis-de-lineal-id-ad-tanque-conico 2/6
h
hr
ca
co )(tan ==α
Donde r (h) es el radio del tanque. h
Solucionando para h: α tan.)( hhr =
Reemplazando r(h) en 1.2:
32.tan.
3
1)( hhV
= α π
(1.3)
Derivando con respecto al tiempo,
dt
dhh
dt
hdV .tan..
3
1)( 32
= α π (1.4)
El volumen del tanque lo podemos expresarcomo:
dt
dhh
dt
hdV ..tan.
)( 22α π = (1.5)
Solucionando para dh/dt:
22.tan.
1
hdt
dh
α π
= (1.6)
Ahora se tiene:
dt
dh= hk QQQ out inout in
.−=− (1.7)
Sustituyendo (1.6) en (1.7):
).(.tan.
122 hk Qhdt
dhout in
−= α π
2222.tan.
.
.tan. h
hk
h
Q
dt
dh out in
α π α π
−=
α π α π 2
2/12
2
2
tan.
..
tan.
. hk hQh
dt
dh out in
−−
−=
α π α π 2
2/3
2
2
tan.
.
tan.
.−−
−=hk Qh
dt
dh out in
Finalmente se obtiene la siguiente relación:
2/32...1),(
−− −=== h B
k Qh B
Qh f dt
dhh out inin
(1.8)
Donde α π 2
tan.= B
Figura 2. Modelo de bloques del sistema
3. PRUEBAS DE LINEALIDAD
El punto de partida en el análisis de un sistemade control generalmente es un modelo
matemático como el mostrado por la ecuación(1.8), donde las entradas y salidas del sistema serelacionan como un conjunto de ecuacionesdiferenciales y/o en diferencia. La mayoría delos modelos matemáticos son no lineales lo queles da cierto grado de complejidad, sin embargo,tales fenómenos no lineales se pueden reducir ydescribir mediante modelos lineales.
Cuando se dice que un sistema es lineal [2] nosreferimos a sistemas que cumplen
simultáneamente las propiedades dehomogeneidad y superposición.
La homogeneidad quiere decir que cuando laentrada de un sistema dado es modificada por unvalor, la salida del sistema varía en la mismaproporción. La propiedad de superposición se
Pág. 2

7/30/2019 34962197 Analisis de Lineal Id Ad Tanque Conico
http://slidepdf.com/reader/full/34962197-analisis-de-lineal-id-ad-tanque-conico 3/6
cumple cuando la señal a la salida del sistema esigual a la suma de las salidas generadas pordiferentes señales en la entrada.
La prueba de linealidad se realiza empleando tres
señales de entrada U1, U2 y U3 tal y como semuestra en la Figura No. 3.
Figura No. 3. Pruebas de linealidad
Las graficas de la Figura No. 4., corresponden ala respuesta del sistema ante una entrada paso deuna unidad.
Figura No. 4. Respuesta del sistemaLa grafica superior corresponde a la respuesta delsistema ante la entrada U1, la grafica del medio la
respuesta ante la entrada U2 y la grafica inferiorla respuesta ante la entrada U3. En este caso Y2no equivale a 2Y1 lo que indica que no se cumplecon la propiedad de homogeneidad y Y3=Y1+Y2cuando U3= U1+U2 no corresponde a la sumapunto a punto de las acciones de U1 y U2 por
separado (propiedad de superposición). De estaforma se puede concluir que el sistema tiene uncomportamiento no lineal.Este resultado permite demostrar que el sistema 2no corresponde a un sistema lineal ya que no sesatisfacen las propiedades de homogeneidad ysuperposición.
4. LINEALIZACION DEL MODELO
La Linealización [3] del modelo se realizaalrededor de uno o varios puntos de operación loscuales se seleccionan de forma arbitraria ocorresponden a puntos críticos del sistema. Paraello se utiliza Series de Taylor. En este caso, sellevara a cabo en dos puntos para los cuales sequiere un comportamiento lineal y se realizacalculando la derivada parcial de la función con
respecto a ∂ h y ∂ Qin:
α π α π 2
2/5
0
2
0,
3
0
tan.
.
2
3
tan.
.2 −−
+−
=∂
∂ hk Qh
h
f out in
(1.8)
α π 2
2
0
tan.
−
=∂
∂ h
Q
f
in
(1.9)
Lo que lleva a: inQbhah~~~
+≈ (1.10)
in
out inQ
hh
hk Qhh
~
tan.
~
tan.
.
2
3
tan.
.2~2
2
0
2
2/5
0
2
0,
3
0
+
+
−≈
−−−
α π α π α π
(1.11)
Donde:0
~hhh −=
∆
y0,
~ininin QQQ −=
∆(1.12)
Punto de operación No. 1.
Pág. 3

7/30/2019 34962197 Analisis de Lineal Id Ad Tanque Conico
http://slidepdf.com/reader/full/34962197-analisis-de-lineal-id-ad-tanque-conico 4/6
mh 2.00= y
005-4.4721e2.0*0001.0*~
0=== hkout Qin
:)10*47.4,2.0(),(3
5
0,0
s
mmQh in
−=
3
10*7.6−−=a , 07.60=b
),(*07.60)(*10*7.6~
00
3
inin QQhhh −+−−≈−
inQhh~
*07.60~
*10*7.6~ 3
+−≈− (1.13)
La función de transferencia es entonces:
)(~
*07.60)(~
*10*7.6)(~
* 3 sQ s H s H s +−≈−
)(~
*07.60)(~
*10*7.6)(~
* 3 sQ s H s H s +≈+−
)(~
*07.60)10*7.6)((~ 3 sQ s s H +≈+
−
310*7.6
07.60
)(~
)(~
−
+
≈
s sQ
s H
Ahora analizando el denominador se tiene unpolo negativo.
010*7.6 3 =+ − s3
10*7.6−−= s
Esto nos indica que el sistema es estable en estepunto.
Punto de operación No. 2.
:)10*6.3246,4.0(),(3
5
0,0 s
mmQh in
−=
0012.0−=a , 0175.15=b
),(*0175.15)(*0012.0~
00 inin QQhhh −+−−≈
(1.14)
Función de transferencia
)0012.0(
0175.15
)(~
)(~
+
≈
s sQ
s H
De igual manera el sistema linealizado en estepunto tiene un polo negativo por lo tanto esestable.
5. IDENTIFICACION DEL SISTEMA
La identificación [2][3][4] del sistema se realizaalrededor del segundo punto de operación(ho=0.4 m) empleando el toolbox ‘Ident’ deMatlab.
Figura No. 5. Identificación del sistema
alrededor de
ho= 4 m
Figura No. 6. Respuesta del sistema
alrededor de en: ho= 4 m y Qino=
6.3246e-5 m3/s.
Pág. 4

7/30/2019 34962197 Analisis de Lineal Id Ad Tanque Conico
http://slidepdf.com/reader/full/34962197-analisis-de-lineal-id-ad-tanque-conico 5/6
Figura No. 7. Toolbox Ident de Matlab
Figura No. 8. Resultados obtenidos para
un sistema de primer orden
La función estimada para el sistema es entonces:
193.3422
15.6129
)(~
)(~
+
≈
s sQ
s H
Ahora, realizando el mismo procedimiento seestima una función de transferencia con dos polos
Figura No. 9. Resultados obtenidos para
un sistema con dos polos
)*3758.40941)(*029184.01(
1721.5890
)(~
)(~
s s sQ
s H
++
≈
Como se obtuvo un porcentaje de aproximacióndel 55.36%, se identifica ahora una función conun polo y un cero.
Pág. 5
7/30/2019 34962197 Analisis de Lineal Id Ad Tanque Conico
http://slidepdf.com/reader/full/34962197-analisis-de-lineal-id-ad-tanque-conico 6/6
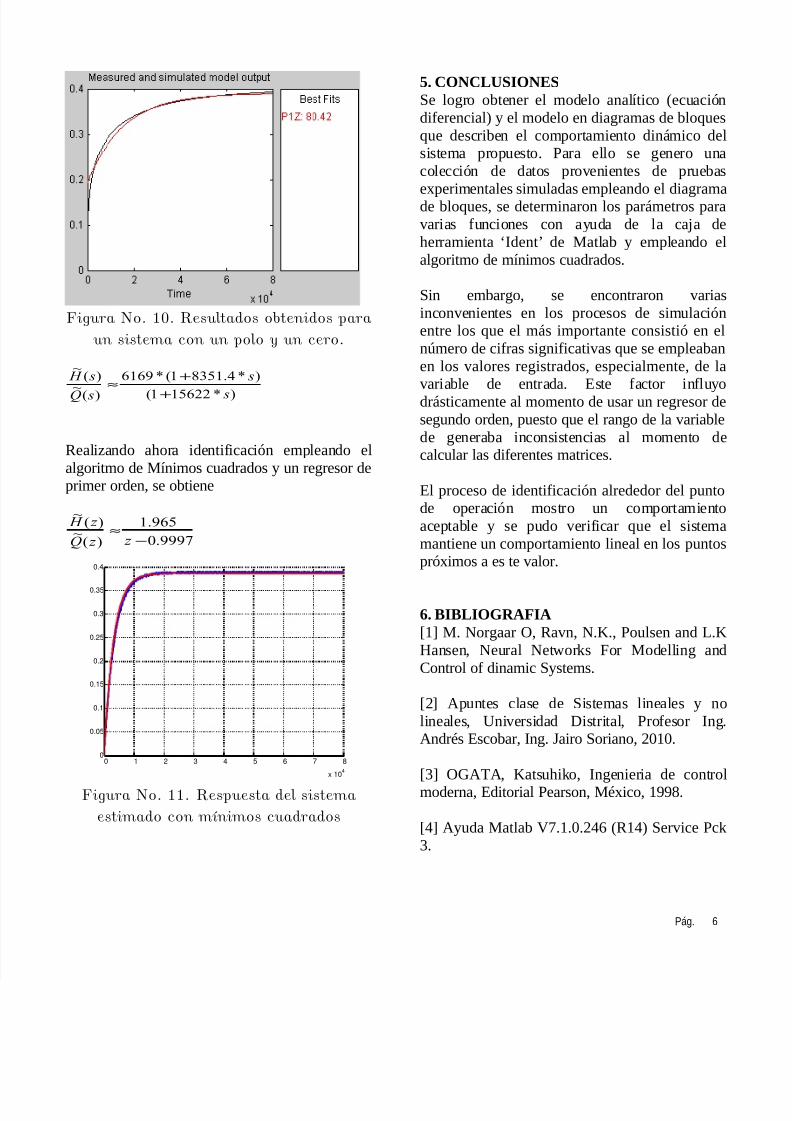
Figura No. 10. Resultados obtenidos para
un sistema con un polo y un cero.
)*156221(
)*4.83511(*6169
)(~
)(~
s
s
sQ
s H
+
+≈
Realizando ahora identificación empleando elalgoritmo de Mínimos cuadrados y un regresor deprimer orden, se obtiene
9997.0
965.1
)(~
)(~
−
≈
z z Q
z H
0 1 2 3 4 5 6 7 8
x 104
0
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
Figura No. 11. Respuesta del sistema
estimado con mínimos cuadrados
5. CONCLUSIONES
Se logro obtener el modelo analítico (ecuacióndiferencial) y el modelo en diagramas de bloquesque describen el comportamiento dinámico delsistema propuesto. Para ello se genero unacolección de datos provenientes de pruebas
experimentales simuladas empleando el diagramade bloques, se determinaron los parámetros paravarias funciones con ayuda de la caja deherramienta ‘Ident’ de Matlab y empleando elalgoritmo de mínimos cuadrados.
Sin embargo, se encontraron variasinconvenientes en los procesos de simulaciónentre los que el más importante consistió en elnúmero de cifras significativas que se empleabanen los valores registrados, especialmente, de lavariable de entrada. Este factor influyodrásticamente al momento de usar un regresor desegundo orden, puesto que el rango de la variablede generaba inconsistencias al momento decalcular las diferentes matrices.
El proceso de identificación alrededor del puntode operación mostro un comportamientoaceptable y se pudo verificar que el sistemamantiene un comportamiento lineal en los puntospróximos a es te valor.
6. BIBLIOGRAFIA
[1] M. Norgaar O, Ravn, N.K., Poulsen and L.KHansen, Neural Networks For Modelling andControl of dinamic Systems.
[2] Apuntes clase de Sistemas lineales y nolineales, Universidad Distrital, Profesor Ing.Andrés Escobar, Ing. Jairo Soriano, 2010.
[3] OGATA, Katsuhiko, Ingenieria de controlmoderna, Editorial Pearson, México, 1998.
[4] Ayuda Matlab V7.1.0.246 (R14) Service Pck3.
Pág. 6