2.004 lab4 intro
TRANSCRIPT

2.004 Lab 4 IntroFlywheel Position Control
Fall, 2019
Harrison Chin

Today’s Tasks
• Closed-loop position control with derivative control action:– Experiment #1: Simulink Simulation– Experiment #2: Proportional Control of Position (one magnet)– Experiment #3: PD Control of Position (one magnet) and Comparison to
Simulation– ★ Design a PD controller using SISOTOOL and command the flywheel to trace a
sequence of waypoints.• Deliverable:
– Lab 4 report template in Z:\Course Lockers\2.004\Labs\Lab4– Properly annotated plots showing your results– Comments and discussions on your observations and results
10/18/19 2.004 Fall 19' 2

Precision Position Control Example:Scanning Electron Microscope (SEM) In Semiconductor Fabrication Process
300 mm diameter wafer (450 mm expected)14 nm feature size (10 nm expected)
Control Console
Vacuum Chamber
Diameter of a human hair ≈ 0.1 mm = 1e5 nm
200,000x magnification
10/18/19 2.004 Fall 19' 3

E-beam column
Metrofocus plate
Wafer carrier
X-ray detector
6-DOF Stage System In Vacuum ChamberScanning Electron Microscope (SEM)
X and Y
Z and fine Z Tilt
Rotation
10/18/19 2.004 Fall 19' 4

Position Sensing Using Encoder
• Encoder Types:– Incremental (Relative): Only the relative position of the shaft is known. No absolute “0” position. An
“INDEX” signal can be added to provide “0” position of a shaft.– Absolute: Unique code for each shaft position.
Reset Button
Position Signal Output
! " # $ % & ' ( )
( " * " %
+ $ * , ) " - . *
/ " ( ) 0 * $ %
' / 1 2
' / 1 3
4 ' 2 5 6 7
) " + - * - " . &
+ $ . + " %
8 4 ' / 9% " * : % ;
$ . < " = $ %
% $ + $ *
PVMPosition Output
10/18/19 2.004 Fall 19' 5

Plant Transfer Functions
Controller Ka Km1
Js+B1N
Kt
E(s)
Vt (s)
Power Amp DC Motor Gear Set Flywheel
Tachometer(PVM Velocity Output)
Plant
Ω(s)
Vc (s)
1s
Θ(s)
KposVpos (s)
Encoder(PVM Position Output)
Velocity TF:
Gv (s) =Ω(s)Vc (s)
=KaKm / NJs+B
Position TF:
Gp(s) =Θ(s)Vc (s)
=1s⋅Ω(s)Vc (s)
=KaKm / NJs2 +Bs
Θ(s) = 1s⋅Ω(s)
10/18/19 2.004 Fall 19' 6A “free” integrator

P, PI and PD Controllers
sKKsG i
pc +=)( sKKsG dpc +=)(
P Controller
pc KsG =)(
EncoderKpos
θ(t)
10/18/19 2.004 Fall 19' 7

Integral and Derivative
0 2 4 6 8 10 12 14 16 18 20Time (sec)
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
2.5
3
Ampl
itude
OriginalIntegralDerivativeLaggingLeading
10/18/19 2.004 Fall 19' 8
Original sine wave

Step Response and Its Derivative
0 2 4 6 8 10 12 14 16 18 20Time (sec)
-1
-0.5
0
0.5
1
1.5
2
Ampl
itude
Step responseDerivative of step response
Step response
Impulse response (derivative of step)
“Lead or anticipation effect”
10/18/19 2.004 Fall 19' 9

Comparison of Closed-Loop Transfer Functions
Gcl (s) =Vpos (s)R(s)
=KpKKpos
Js2 +Bs+KpKKpos
Gcl (s) =Vpos (s)R(s)
=Kp +Kds( )KKpos
Js2 + B+KdKKpos( )s+KpKKpos
K =KaKm
NLet
P Control:
PD Control:
22 2 nnss wzw ++
JB
n 2=Þzw
−Kp
KdA real zero at
10/18/19 2.004 Fall 19' 10
Settling time ±2%( ): Ts =4ζωn

2nd Order System Poles
TF(s) = Kdc ⋅ωn2
s2 + 2ζωns+ωn2 Tp =
π
ωn 1−ζ 2
Ts =4ζωn
±2%( )
%OS = e−
ζπ
1−ζ 2
"
#
$$
%
&
''×100
22,1 1 zwzwws -±-=±-= nndd jjs
02 22 =++ nnss wzw
10/18/19 2.004 Fall 19' 11

PID Simulink Model
PID Controller
Position TF
Position Sensor Gain10/18/19 2.004 Fall 19' 12
Create your own Simulink model
Library Browser
Response data saved to ‘simout’, to plot:>> plot(tout, simout)

Control Action Comparison
• Proportional action – improves speed but with steady-state error in some cases
• Integral action – improves steady state error but with less stability; may create overshoot, longer transient, or integrator windup
• Derivative action – improves stability but sensitive to noise; may create large output when the input is not a continuous signal
PID controller transfer function
10/18/19 2.004 Fall 19' 13
Gc (s) = Kp +Ki
s+Kds
=Kds
2 +Kps+Ki
s
= Kd
s2 + KpKd
⎛
⎝⎜
⎞
⎠⎟s+ Ki
Kd( )s
⎛
⎝
⎜⎜⎜⎜
⎞
⎠
⎟⎟⎟⎟

Practical Consideration
Band-limited differentiator to eliminate excess noise in the signal.
Finite difference method
10/18/19 2.004 Fall 19' 14
Use a Pseudo Differentiator

Practical Consideration
10/18/19 2.004 Fall 19' 15
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2-0.5
0
0.5
1
1.5Smooth Step vs. Step Function
StepSmooth step
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2Time (sec)
-0.5
0
0.5
1
1.5
2
2.5
3Derivative of Smooth Step Function
Use a Smooth Step Input

PD Control in SISOTOOL
10/18/19 2.004 Fall 19' 16

PD Control in SISOTOOL
10/18/19 2.004 Fall 19' 17
Kp 1+Kd
Kp
s⎛
⎝⎜⎜
⎞
⎠⎟⎟
KJs2 +Bs
Kpos
Vr (s)E(s)
Vpos (s)
+_ Θ(s)
Two open-loop poles:p1 = 0
p2 =−BJ
⎧
⎨⎪
⎩⎪
One open-loop zero: z =−Kp
Kd

FYI: A More Realistic Simulation
10/18/19 2.004 Fall 19' 18
PID Controller Block
Saturation Block set to ±10
Time (sec)0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
Volts
-5
0
5
10
15
20PD Position Control Simulation
Set pointCurrentResponse
Noise Block
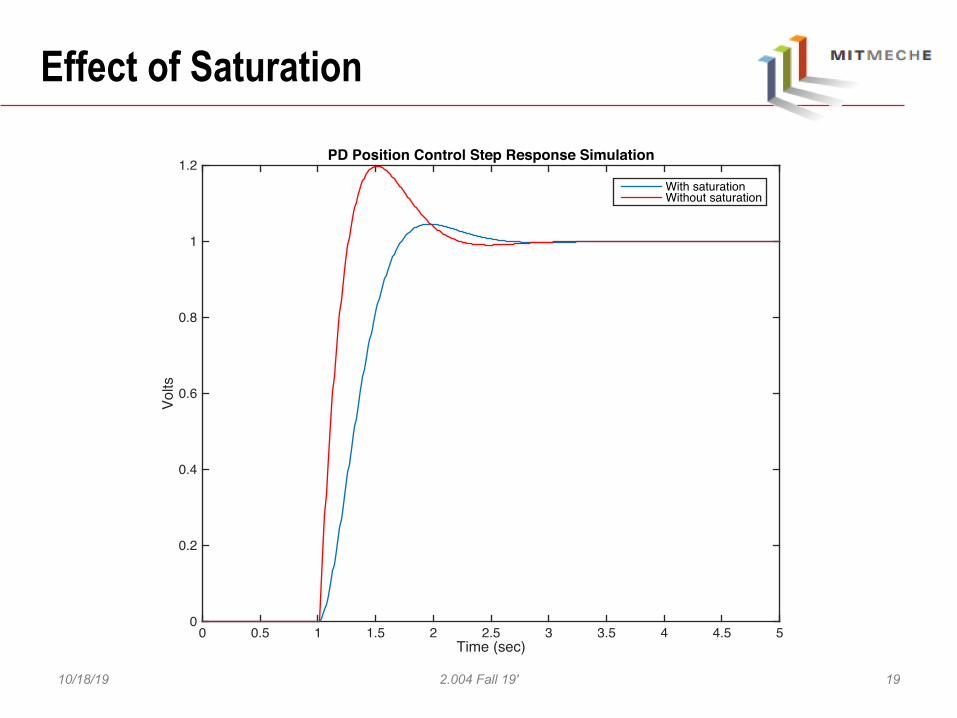
Effect of Saturation
10/18/19 2.004 Fall 19' 19
Time (sec)0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
Volts
0
0.2
0.4
0.6
0.8
1
1.2PD Position Control Step Response Simulation
With saturationWithout saturation

In control design, zeros play a major role
Effects of Zeros
• Zeroes reduce the effect of nearby poles• The derivative (lead) effect
10/18/19 2.004 Fall 19' 20
ï30 ï25 ï20 ï15 ï10 ï5 0 5ï10
ï8
ï6
ï4
ï2
0
2
4
6
8
100.30.520.70.820.90.95
0.978
0.994
0.30.520.70.820.90.95
0.978
0.994
510152025
Root Locus
Real Axis (secondsï1)
Imag
inar
y Ax
is (s
econ
dsï1
)
ï30 ï25 ï20 ï15 ï10 ï5 0 5ï10
ï8
ï6
ï4
ï2
0
2
4
6
8
100.30.520.70.820.90.95
0.978
0.994
0.30.520.70.820.90.95
0.978
0.994
510152025
Root Locus
Real Axis (secondsï1)
Imag
inar
y Ax
is (s
econ
dsï1
)
)10)(1(119)(1 ++
´=ss
sG)10)(1(
)11(9)(2 +++=ss
ssG

)()1()( 0 sGssG += aa1-=z
Step Response: )(1)(1)()1()( 000 sGs
sGs
sGssY aa +=+=
Impulse responseThe step response of )(0 sG
5.0=a
1=a
0<a
Step Response
zero initial slope
Impulse Response
hump
non-zero initial slope
22
2
0 2)(
nn
n
sssG
wzww
++=
For , the step response exhibits an undershoot. The output first moves in the opposite direction. The response is also very slow.
By adding the impulse response, i.e. the derivative of the step response, the resultant response becomes faster, but more overshoot.
0<a
Effects of Zeros
10/18/19 2.004 Fall 19' 21