1 signals and systems - kauno technologijos …girrol/skaidres/literatura/angliska/pateiktys/... ·...
TRANSCRIPT
1
1 Signals and Systems
introducing “language for describing signals and systems”
Outline
1.1 Continuous–Time and Discrete–Time Signals
1.2 Elementary Signals
1.3 Continuous–Time and Discrete–Time Systems
1.4 Basic System Properties
Lampe, Schober: Signals and Communications

2
1.1 Continuous–Time and Discrete–Time Signals
� Unified representation of physical phenomena by signals
Signal: Function or sequence that represents information.
– One or more independent variables
– Continuous or discrete independent variables
– Examples: time, location, etc.
1.1.1 Mathematical Representation
� Continuous–time signals
– Symbol t for independent variable
– Use parentheses (·)
Continuous–time signal: x(t)
– Graphical representation
0 t
x(t)
Lampe, Schober: Signals and Communications

3
� Discrete–time signals
– Symbol n for independent variable
– Use brackets [·]
Discrete–time signal: x[n]
– Graphical representation
x[0]
x[1]x[−1]
0 321
x[2]x[−2]
n−3 −2 −1
54
x[n]
Lampe, Schober: Signals and Communications

4
1.1.2 Signal Energy and Power
� Often classification of signals according to energy and power
– Terminology energy and power used for any signal x(t), x[n]
– Need not necessarily have a physical meaning
� Signal energy
– Energy of a possibly complex continuous–time signal x(t) in
interval t1 ≤ t ≤ t2
E(t1, t2) =
t2∫
t1
|x(t)|2 dt
– Energy of a possibly complex discrete–time signal x[n] in interval
n1 ≤ n ≤ n2
E(n1, n2) =
n2∑
n=n1
|x[n]|2
– Total energy
E∞ = E(−∞,∞) =
∞∫
−∞
|x(t)|2 dt
E∞ = E(−∞,∞) =
∞∑
n=−∞
|x[n]|2
Lampe, Schober: Signals and Communications
5
Example:
Total energy of the discrete–time signal
x[n] =
{
an n ≥ 0
0 n < 0
with |a| < 1.
E∞ =
∞∑
n=−∞
|x[n]|2 =
∞∑
n=0
(|a|2)n =1
1 − |a|2
� Signal power
– Consider the time–averaged signal power
– Average power of x(t) in interval t1 ≤ t ≤ t2
P (t1, t2) =1
t2 − t1
t2∫
t1
|x(t)|2 dt
– Average power of x[n] in interval n1 ≤ n ≤ n2
P (n1, n2) =1
n2 − n1 + 1
n2∑
n=n1
|x[n]|2
– Analogously
P∞ = P (−∞,∞) = limT→∞
1
2T
T∫
−T
|x(t)|2 dt
P∞ = P (−∞,∞) = limN→∞
1
2N + 1
N∑
n=−N
|x[n]|2
Lampe, Schober: Signals and Communications
6
� Classification of signals based on their energy and power
– Signals with finite total energy E∞ < ∞
∗ Zero average power P∞ = 0
∗ Examples: example above, any signal with finite duration
– Signals with finite average power P∞ < ∞
∗ Infinite total energy E∞ = ∞ if P∞ > 0
∗ Examples: periodic signals, e.g. x(t) = cos(t), x[n] = sin(5n)
– Signals with infinite power P∞ = ∞ and infinite energy E∞ =
∞
∗ Not desirable in engineering applications
∗ Examples: x(t) = et, x[n] = n10
Lampe, Schober: Signals and Communications

7
1.1.3 Transformations of the Independent Variable
� Time shift
– Replace t → t − t0 x(t) → x(t − t0)
n → n − n0⇒ x[n] → x[n − n0]
– Delay: t0, n0 > 0, Advance: t0, n0 < 0
� Time reversal
– Replace t → −t x(t) → x(−t)
n → −n ⇒ x[n] → x[−n]
� Time scaling
– Replace t → αt , α ∈ IR x(t) → x(αt)
n → αn , α ∈ ZZ ⇒ x[n] → x[αn]
– Continuous–time case: |α| < 1 : signal is linearly stretched
|α| > 1 : signal is linearly compressed
� Time shift, time reversal, and time scaling operations arise naturally
in the processing of signals
Lampe, Schober: Signals and Communications

8
Example:
n
nt
n
n
t
t
Time-scaled signals
Time-reversed signals
Time-shifted signals
Signals
t
x[2n]
x[−n]
x[n − 4]
x(2/3t)
x(−t)
x(t − t0)
x(t) x[n]
t0
Lampe, Schober: Signals and Communications
9
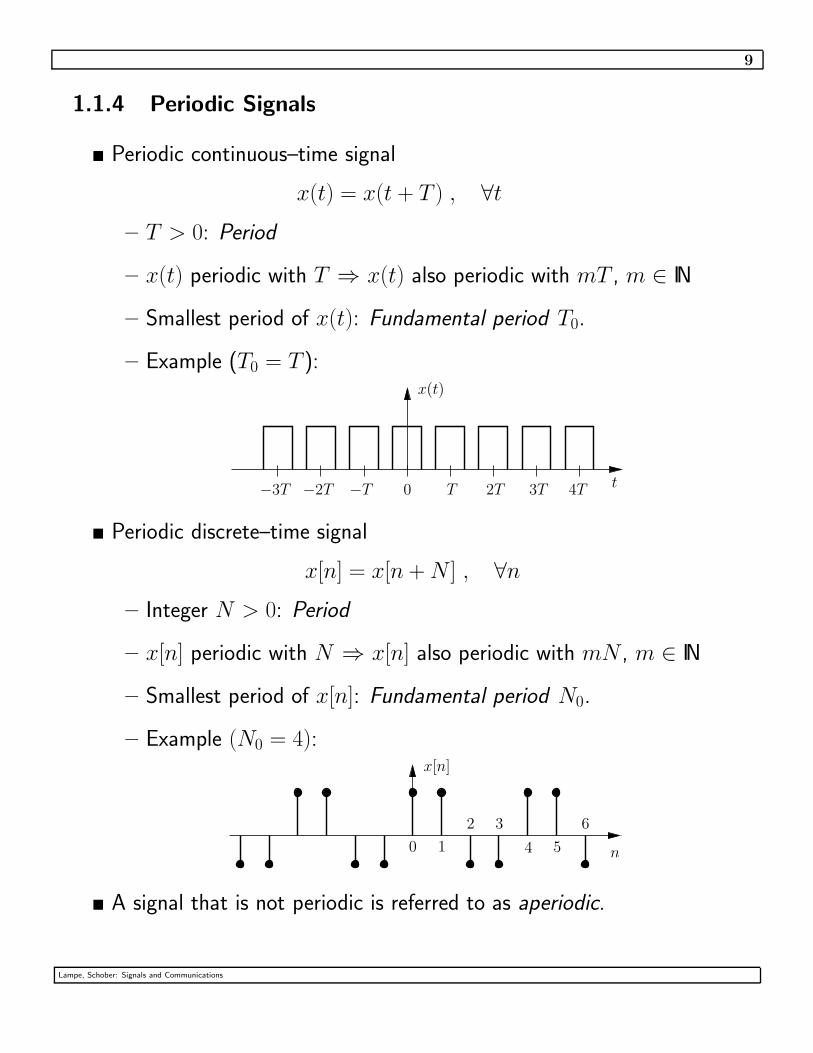
1.1.4 Periodic Signals
� Periodic continuous–time signal
x(t) = x(t + T ) , ∀t
– T > 0: Period
– x(t) periodic with T ⇒ x(t) also periodic with mT , m ∈ IN
– Smallest period of x(t): Fundamental period T0.
– Example (T0 = T ):
0
x(t)
t4T3T2T−3T −2T −T T
� Periodic discrete–time signal
x[n] = x[n + N ] , ∀n
– Integer N > 0: Period
– x[n] periodic with N ⇒ x[n] also periodic with mN , m ∈ IN
– Smallest period of x[n]: Fundamental period N0.
– Example (N0 = 4):
n
3 6
x[n]
0 1
2
54
� A signal that is not periodic is referred to as aperiodic.
Lampe, Schober: Signals and Communications

10
1.1.5 Even and Odd Signals
� Even signal
x(−t) = x(t) or x[−n] = x[n]
– Example:x(t)
t
� Odd signal
x(−t) = −x(t) or x[−n] = −x[n]
– Example:
n
x[n]
– Necessarily: x(0) = 0 or x[0] = 0
� Decomposition of any signal into an even and odd part:
x(t) = Ev{x(t)} + Od{x(t)} or x[n] = Ev{x[n]} + Od{x[n]}
with
Ev{x(t)} =1
2(x(t) + x(−t)) or Ev{x[n]} =
1
2(x[n] + x[−n])
and
Od{x(t)} =1
2(x(t) − x(−t)) or Od{x[n]} =
1
2(x[n] − x[−n])
Lampe, Schober: Signals and Communications
11
1.2 Elementary Signals
� Several classes of signals play prominent role
– model many physical signals
– serve as building blocks for many other signals
– serve for system analysis
1.2.1 Continuous–Time Complex Exponential and Sinusoidal
Signals
� Complex exponential signal
x(t) = Ceat
– In general, complex numbers C and a (C, a ∈ C)
– Real exponential signal if both a and C real (C, a ∈ IR)
– Periodic complex exponential signal if a = jω0
∗ With C = Aejφ (A, φ ∈ IR):
x(t) = Aej(ω0t+φ)
∗ Signal is periodic:
Aej(ω0t+φ) = Aej(ω0(t+T )+φ) = Aej(ω0t+φ)ejω0T
where ejω0T != 1
Excluding the trivial solution ω0 = 0 ⇒ Fundamental period
T0 =2π
|ω0|
Lampe, Schober: Signals and Communications
12
– Set of harmonically related complex periodic exponentials
φk(t) = ejkω0t, k = 0, ±1, ±2, . . .
∗ k = 0: φ0(t) constant
k 6= 0: φk(t) periodic with fundamental frequency kω0 and
fundamental period T0/|k|
∗ Sets of harmonically related complex exponentials used to
represent many other periodic signals
– General complex exponential signal
∗ With C = Aejφ (A, φ ∈ IR)
and a = r + jω0 (r, ω0 ∈ IR)
Ceat = Aertej(ω0t+φ) = Aertcos(ω0t + φ) + jAertsin(ω0t + φ)
∗ r > 0: exponentially growing signal
r < 0: exponentially decaying signal
� Sinusoidal signals
xc(t) = Acos(ω0t + φ) = Re{Aej(ω0t+φ)}
and
xs(t) = Asin(ω0t + φ) = Im{Aej(ω0t+φ)}
xc(t) and xs(t) also have period T0 = 2π/|ω0|, of course.
Lampe, Schober: Signals and Communications

13
� Periodic signals have infinite total energy but finite average power.
– Exponential x(t) = ejω0t
∗ Energy over one period T0
Eperiod =
T0∫
0
|ejω0t|2 dt = T0
∗ Average power per period
Pperiod =Eperiod
T0= 1
∗ Average power
P∞ = limT→∞
1
2T
T∫
−T
|ejω0t|2 dt = 1
Lampe, Schober: Signals and Communications
14
1.2.2 Discrete–Time Complex Exponential and Sinusoidal Sig-
nals
� Complex exponential signal
x[n] = Cαn (= Ceβn , α = eβ)
– Real exponential signal if both C and α real
– General complex exponential signal
∗ With C = Aejφ and α = |α|ejω0 (A, φ, ω0 ∈ IR)
x[n] = A|α|nej(ω0n+φ)
= A|α|ncos(ω0n + φ) + jA|α|nsin(ω0n + φ)
∗ |α| > 1: exponentially growing signal
|α| < 1: exponentially decaying signal
∗ |α| = 1:
x[n] = Aej(ω0n+φ) = Acos(ω0n + φ) + jAsin(ω0n + φ)
� Sinusoidal signal
xc[n] = Acos(ω0n + φ) = Re{Aej(ω0n+φ)}
and
xs[n] = Asin(ω0n + φ) = Im{Aej(ω0n+φ)}
� Both Aej(ω0n+φ) and Acos(ω0n + φ) are discrete–time signals with
finite average power but infinite total energy.
Lampe, Schober: Signals and Communications

15
� Certain properties
Important differences between discrete–time and continuous–time
complex exponentials
1. Increase frequency ω0 by integer multiples of 2π
ej(ω0+m2π)n = ejω0nejm2πn = ejω0n
Observation: same exponential for frequency ω0 and frequencies
ω0 ± 2π, ω0 ± 4π, . . .
Conclusion: sufficient to consider frequency interval of length 2π
Usually: intervals 0 ≤ ω0 < 2π and −π ≤ ω0 < π used
Example: Fig. 1.27 in text book
2. Periodicity: period N > 0
ejω0N != 1
⇒ ω0N = 2πm,
orω0
2π=
m
N
where m is integer
Observation: ejω0n is periodic if ω0/(2π) is a rational number,
and is aperiodic otherwise.
3. Fundamental period N0:
N0 = m
(
2π
ω0
)
for ω0 6= 0 and gcd(N0, m) = 1 (N0 and m have no factors in
common)
Lampe, Schober: Signals and Communications

16
Example:
– x(t) = cos(8πt/31)
ω0 =
Fundamental period T0 = 2π/ω0 =
– x[n] = cos(8πn/31) (= x(t = n))
ω0 =
Periodic?
Fundamental period N0 = m(2π/ω0) =
for m =
– x[n] = cos(n/6)
ω0 =
Periodic?
Fundamental period N0 = m(2π/ω0) =
for m =
� Set of harmonically related discrete–time periodic exponentials
φk[n] = ejk(2π/N)n, k = 0, ±1, . . .
– Common period N
– Observation:
φk+N [n] = ej(k+N)(2π/N)n = ejk(2π/N)nej2πn = φk[n]
⇒ Only N distinct complex exponentials φ0[n], φ1[n], . . .,
φN−1[n].
Lampe, Schober: Signals and Communications
17
1.2.3 The Discrete–Time Unit Impulse and Unit Step Se-
quences
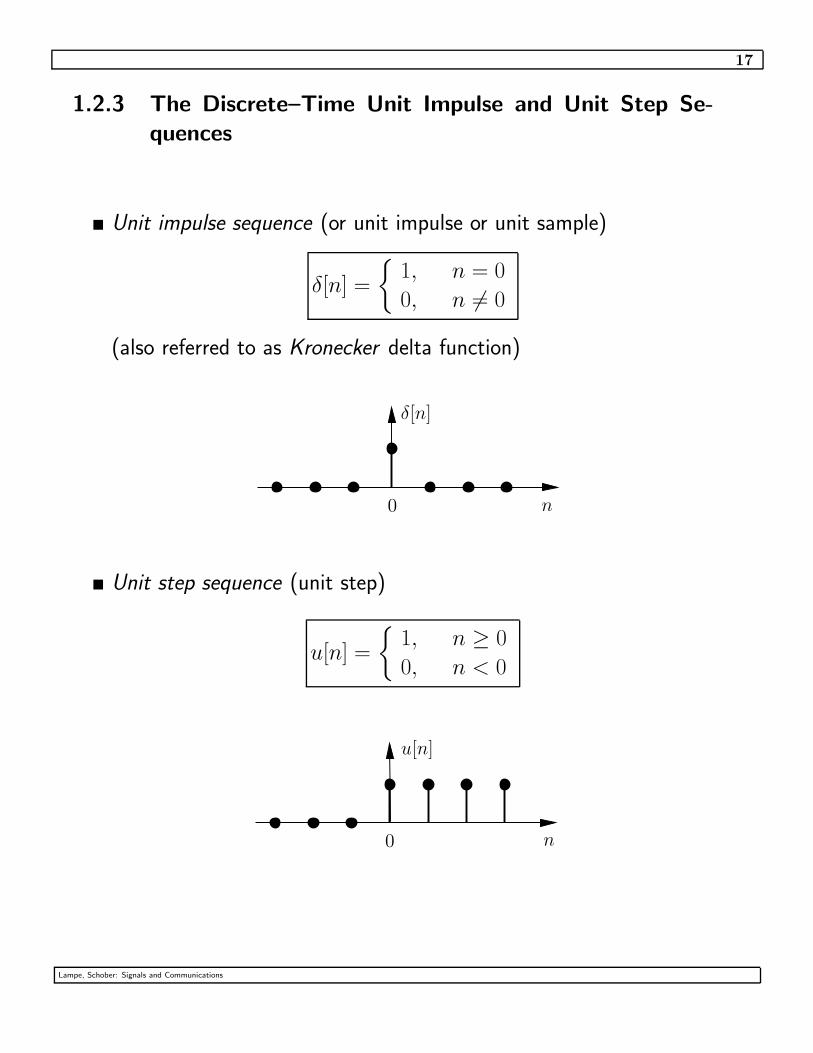
� Unit impulse sequence (or unit impulse or unit sample)
δ[n] =
{
1, n = 0
0, n 6= 0
(also referred to as Kronecker delta function)
n
δ[n]
0
� Unit step sequence (unit step)
u[n] =
{
1, n ≥ 0
0, n < 0
0 n
u[n]
Lampe, Schober: Signals and Communications
18
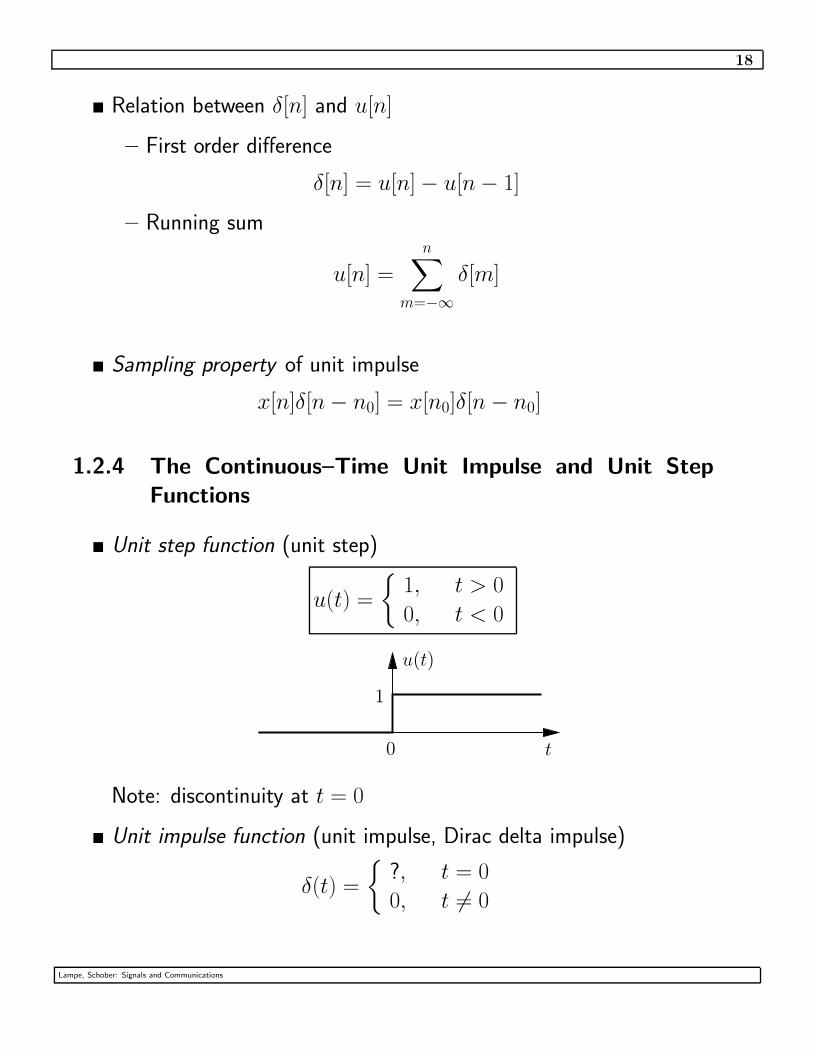
� Relation between δ[n] and u[n]
– First order difference
δ[n] = u[n] − u[n − 1]
– Running sum
u[n] =n
∑
m=−∞
δ[m]
� Sampling property of unit impulse
x[n]δ[n − n0] = x[n0]δ[n − n0]
1.2.4 The Continuous–Time Unit Impulse and Unit Step
Functions
� Unit step function (unit step)
u(t) =
{
1, t > 0
0, t < 0
u(t)
t0
1
Note: discontinuity at t = 0
� Unit impulse function (unit impulse, Dirac delta impulse)
δ(t) =
{
?, t = 0
0, t 6= 0
Lampe, Schober: Signals and Communications
19
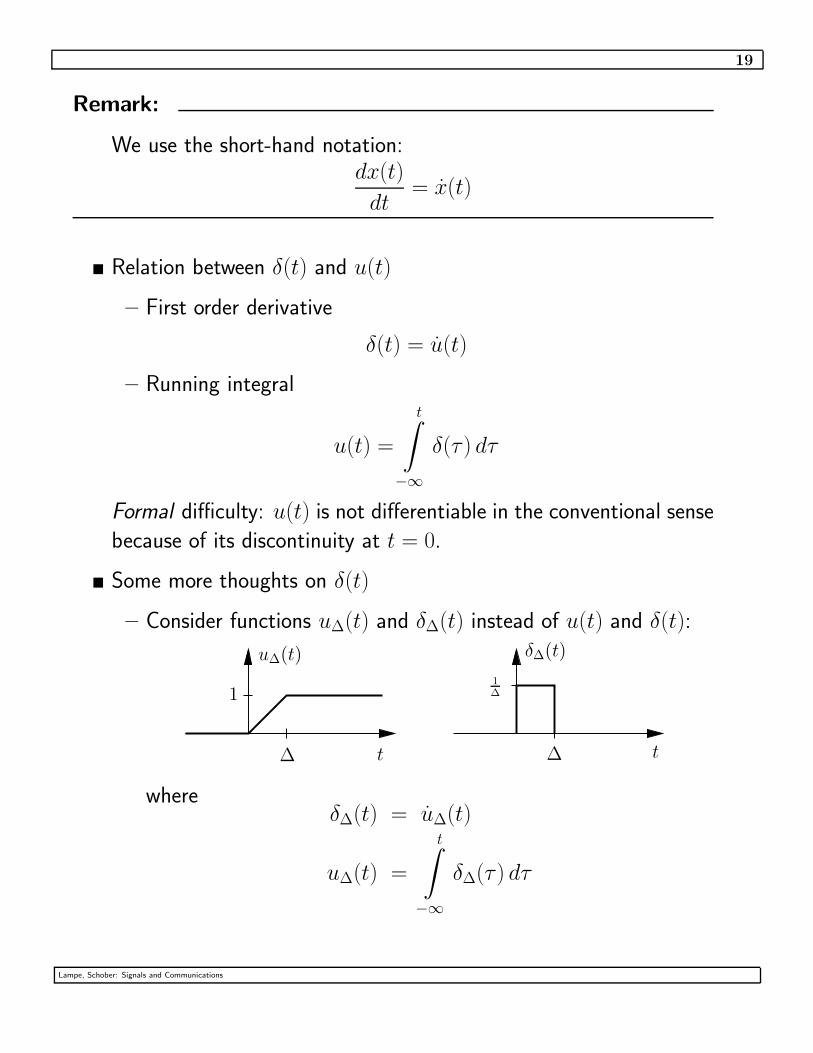
Remark:
We use the short-hand notation:dx(t)
dt= x(t)
� Relation between δ(t) and u(t)
– First order derivative
δ(t) = u(t)
– Running integral
u(t) =
t∫
−∞
δ(τ ) dτ
Formal difficulty: u(t) is not differentiable in the conventional sense
because of its discontinuity at t = 0.
� Some more thoughts on δ(t)
– Consider functions u∆(t) and δ∆(t) instead of u(t) and δ(t):
u∆(t)
∆ t
δ∆(t)
1
∆
t∆
1
whereδ∆(t) = u∆(t)
u∆(t) =
t∫
−∞
δ∆(τ ) dτ
Lampe, Schober: Signals and Communications

20
– Limit ∆ → 0
∗ u(t) = lim∆→0
u∆(t)
∗ δ(t) :
t
δ∆1(t)
δ∆3(t)
δ∆2(t)
∆3 ∆2 ∆1
1
∆1
1
∆3
1
∆2
Observe: Area under δ∆(t) always 1
⇒ δ(t) is an infinitesimally narrow impulse with area 1.
δ(t) = lim∆→0
δ∆(t)∞
∫
−∞
δ(τ ) dτ = 1
– Representation
a
t
aδ(t)
t0
1
t
δ(t − t0)
1
t
δ(t)
Lampe, Schober: Signals and Communications

21
– Properties
∗ Sampling property (x(t) continuous at t = t0)
∞∫
−∞
x(τ )δ(τ − t0) dτ = x(t0)
x(t)δ(t − t0) = x(t0)δ(t − t0)
∗ Linearity
∞∫
−∞
(aδ(τ ) + bδ(τ ))x(τ ) dτ =
∞∫
−∞
aδ(τ )x(τ ) dτ +
∞∫
−∞
bδ(τ )x(τ ) dτ
= (a + b)x(0)
aδ(t) + bδ(t) = (a + b)δ(t)
∗ Time scaling (a ∈ IR)
∞∫
−∞
δ(aτ )x(τ ) dτ =
∞∫
−∞
1
|a|δ(ν)x(ν/a) dν =
1
|a|x(0)
δ(at) =1
|a|δ(t)
Lampe, Schober: Signals and Communications

22
∗ Differentiation and derivative
∞∫
−∞
δ(τ )x(τ ) dτ = δ(t)x(t)∣
∣
∣
∞
−∞−
∞∫
−∞
δ(τ )x(τ ) dτ = −x(0)
∞∫
−∞
δ(τ )x(τ ) dτ = −x(0)
tδ(t) = −δ(t)
Remark:
More formal discussion of the unit impulse δ(t) in text books on
generalized functions or distributions.
Lampe, Schober: Signals and Communications
23
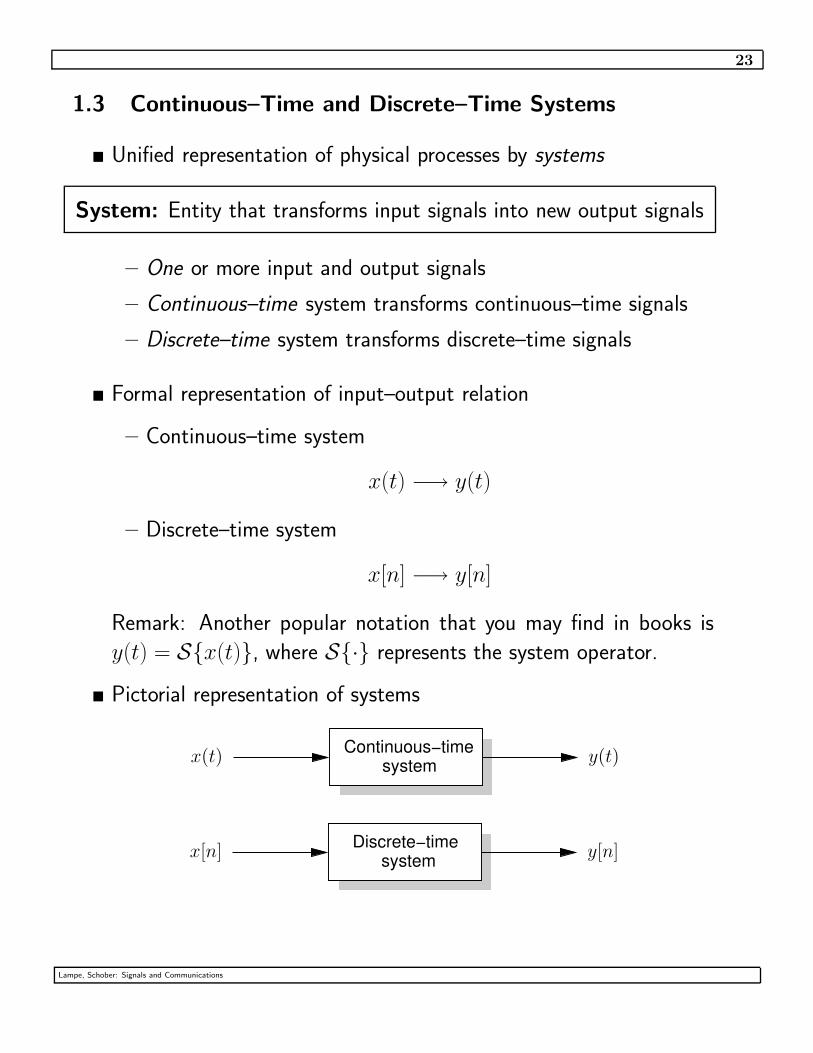
1.3 Continuous–Time and Discrete–Time Systems
� Unified representation of physical processes by systems
System: Entity that transforms input signals into new output signals
– One or more input and output signals
– Continuous–time system transforms continuous–time signals
– Discrete–time system transforms discrete–time signals
� Formal representation of input–output relation
– Continuous–time system
x(t) −→ y(t)
– Discrete–time system
x[n] −→ y[n]
Remark: Another popular notation that you may find in books is
y(t) = S{x(t)}, where S{·} represents the system operator.
� Pictorial representation of systems
Continuous−timesystem
x(t) y(t)
systemDiscrete−time
x[n] y[n]
Lampe, Schober: Signals and Communications
24
1.3.1 Simple Examples of Systems
� Quadratic system
y(t) = (x(t))2
� System represented by a first order differential equation
y(t) + ay(t) = bx(t)
with constants a and b
� Delay system
y[n] = x[n − 1]
� System described by a first order difference equation
y[n] = ay[n − 1] + bx[n]
with constants a and b
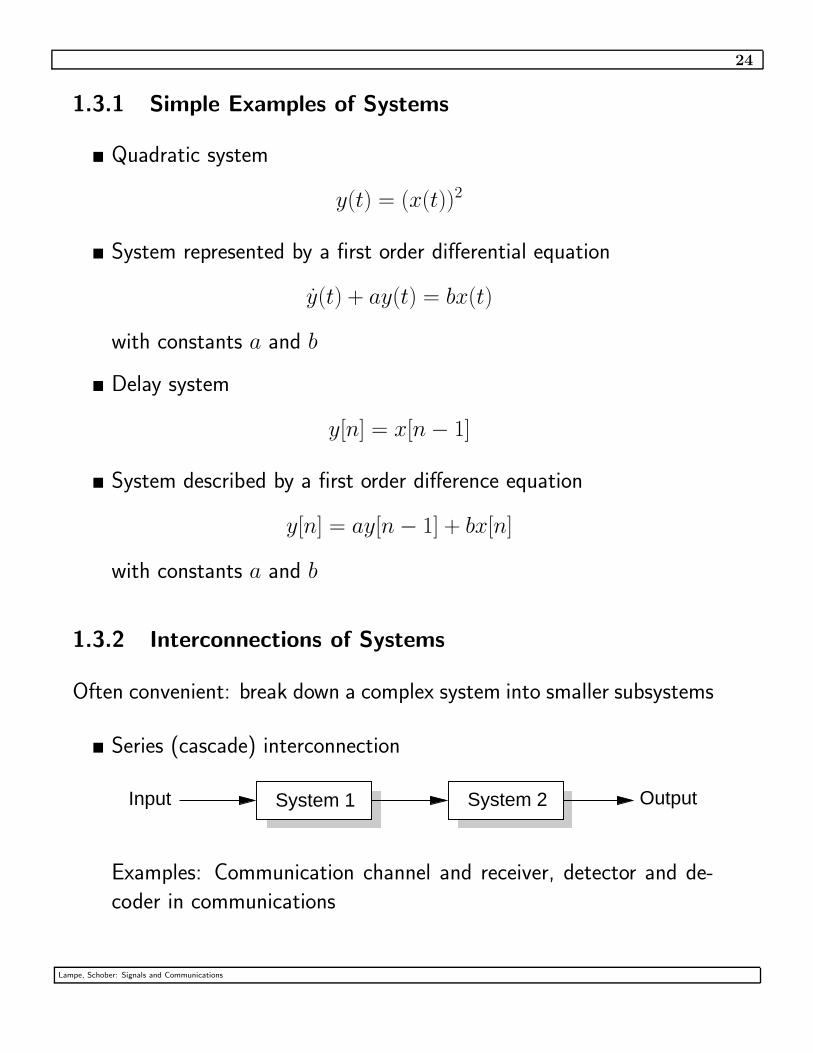
1.3.2 Interconnections of Systems
Often convenient: break down a complex system into smaller subsystems
� Series (cascade) interconnection
System 1 System 2Input Output
Examples: Communication channel and receiver, detector and de-
coder in communications
Lampe, Schober: Signals and Communications
25
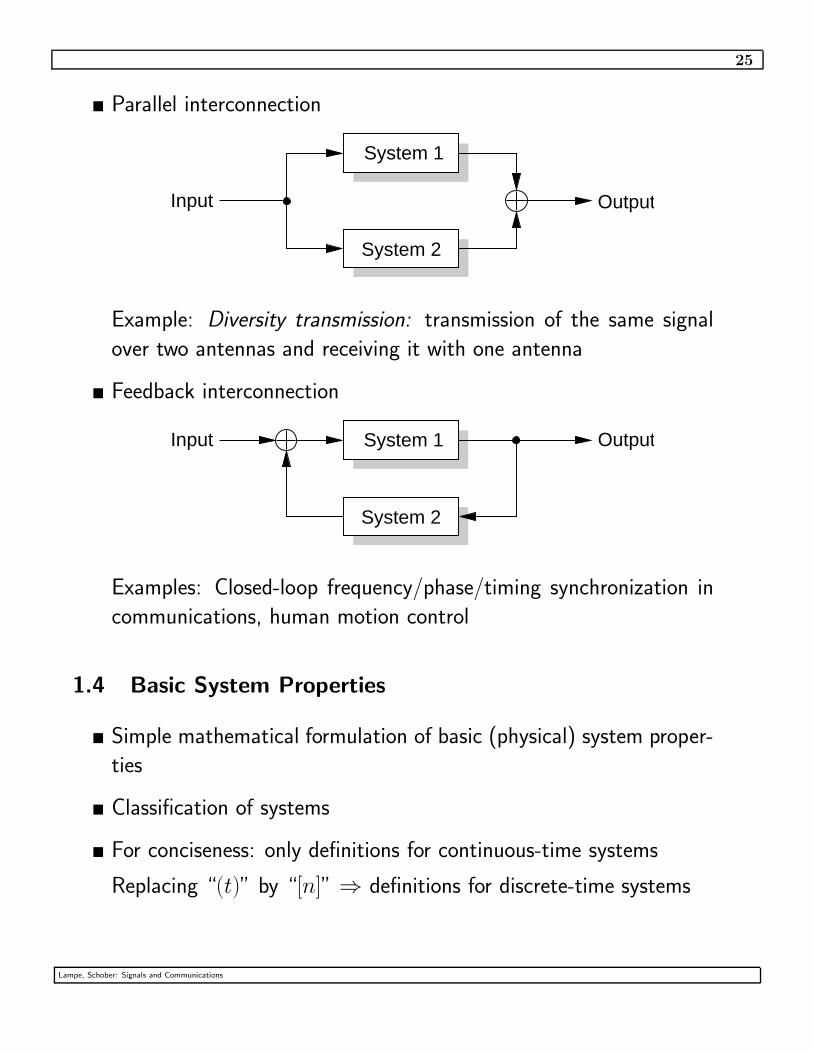
� Parallel interconnection
System 1
System 2
OutputInput
Example: Diversity transmission: transmission of the same signal
over two antennas and receiving it with one antenna
� Feedback interconnection
OutputInput
System 2
System 1
Examples: Closed-loop frequency/phase/timing synchronization in
communications, human motion control
1.4 Basic System Properties
� Simple mathematical formulation of basic (physical) system proper-
ties
� Classification of systems
� For conciseness: only definitions for continuous-time systems
Replacing “(t)” by “[n]” ⇒ definitions for discrete-time systems
Lampe, Schober: Signals and Communications
26
1.4.1 Linearity
� Let x1(t) −→ y1(t) and x2(t) −→ y2(t)
Linear system if
1. Additivity
x1(t) + x2(t) −→ y1(t) + y2(t)
2. Homogeneity
ax1(t) −→ ay1(t) , ∀a ∈ C
� Linear systems possess property of superposition
Let xk(t) −→ yk(t), then
K∑
k=1
akxk(t) = x(t) −→ y(t) =K
∑
k=1
akyk(t)
� “Not linear” systems are referred to as nonlinear.
Example:
1. System y(t) = tx(t) is linear.
To see this let
x1(t) −→ y1(t) = tx1(t)
x2(t) −→ y2(t) = tx2(t)
and
x3(t) = ax1(t) + bx2(t) ,
Lampe, Schober: Signals and Communications

27
and check
y3(t) = tx3(t) = tax1(t) + tbx2(t) = ay1(t) + by2(t) ,
i.e.,
ax1(t) + bx2(t) −→ ay1(t) + by2(t)
2. System y[n] = (x[n])2 is nonlinear.
To see this let
x1[n] −→ y1[n] = (x1[n])2
x2[n] −→ y2[n] = (x2[n])2
and check additivity for input x3[n] = x1[n] + x2[n]
y3[n] = (x3[n])2 = y1[n] + y2[n] + 2x1[n]x2[n]
6= y1[n] + y2[n]
3. System y(t) = (x(t))∗ is ?
1.4.2 Time Invariance
� Time invariant system if behavior and characteristics are time-invariant,
i.e., identical response to same input signal no matter when input
signal is applied
x(t − t0) −→ y(t − t0)
Example:
1. The system y(t) = (x(t))2 is ?
2. The system y[n] = nx[n] is ?
Lampe, Schober: Signals and Communications

28
Remark:
Linear and time-invariant (linear time-invariant (LTI)) systems play
a prominent role for system modeling and analysis. The importance
of complex exponentials derives from the fact that they are eigen-
functions of LTI systems.
1.4.3 Systems with and without Memory
� Memoryless system if output signal depends only on present value
of input signal
� Otherwise, a system is said to possess memory or to be dispersive.
Example:
– Memoryless systems
1. Limiter: y[n] =
x[n] , −A ≤ x[n] ≤ A
−A , x[n] < −A
A , x[n] > A
2. Amplifier: y(t) = Ax(t)
– Systems with memory
1. Accumulator: y[n] =
n∑
k=−∞
x[k] = x[n] + y[n − 1]
2. Delay: y(t) = x(t − t0)
3. Capacitor: y(t) =1
C
t∫
−∞
x(τ ) dτ
Lampe, Schober: Signals and Communications
29
1.4.4 Invertibility and Inverse Systems
� Invertible system if bijective transformation x(t) −→ y(t) from
input to output
� In this case an inverse system y(t) −→ w(t) = x(t) exists
InversesystemSystem
y(t)
w(t) = x(t)x(t)
Example:
– Invertible systems
1. Amplifier: y(t) = Ax(t), A 6= 0
Inverse system: w(t) = 1Ay(t) (=Amplifier)
2. Accumulator: y[n] = y[n − 1] + x[n]
Inverse system: w[n] = y[n] − y[n − 1] (=Differentiator)
– Noninvertible systems
1. Limiter: y[n] =
x[n] , −A ≤ x[n] ≤ A
−A , x[n] < −A
A , x[n] > A
2. Slicer: y[n] =
{
1 , x[n] ≥ 0
−1 , else
Lampe, Schober: Signals and Communications
30
1.4.5 Causality
� Causal system if output at any time depends only on past and
present values of the input
If x1(t) = x2(t) for t ≤ t0 then y1(t) = y2(t) for t ≤ t0 , ∀t0
� Implication:
– Causal+Linear:
If x1(t) = 0 for t ≤ t0 then y1(t) = 0 for t ≤ t0, ∀t0
Example:
– Causal system
Accumulator: y[n] =n
∑
k=−∞
x[k] = x[n] + y[n − 1]
– Noncausal system
Averager: y[n] =1
2N + 1
N∑
k=−N
x[n − k]
� All memoryless systems are causal
� Causal systems in real-time processing
Lampe, Schober: Signals and Communications
31
1.4.6 Stability
� Consider bounded–input bounded–output (BIBO) stability
� Stable system if for any bounded input signal
|x(t)| ≤ Bx < ∞ , ∀t
the output signal is bounded
|y(t)| ≤ By < ∞ , ∀t
Example:
– Stable system
Averager: y[n] =1
2N + 1
N∑
k=−N
x[n − k]
Bounded input |x[n]| < Bx ⇒ bounded output |y[n]| < By =
Bx
– Instable system
Integrator: y(t) =
t∫
−∞
x(τ ) dτ
E.g. bounded input x(t) = u(t) ⇒ unbounded output y(t) = t
� System stability is important in engineering applications, unstable
systems need to be stabilized.
Lampe, Schober: Signals and Communications
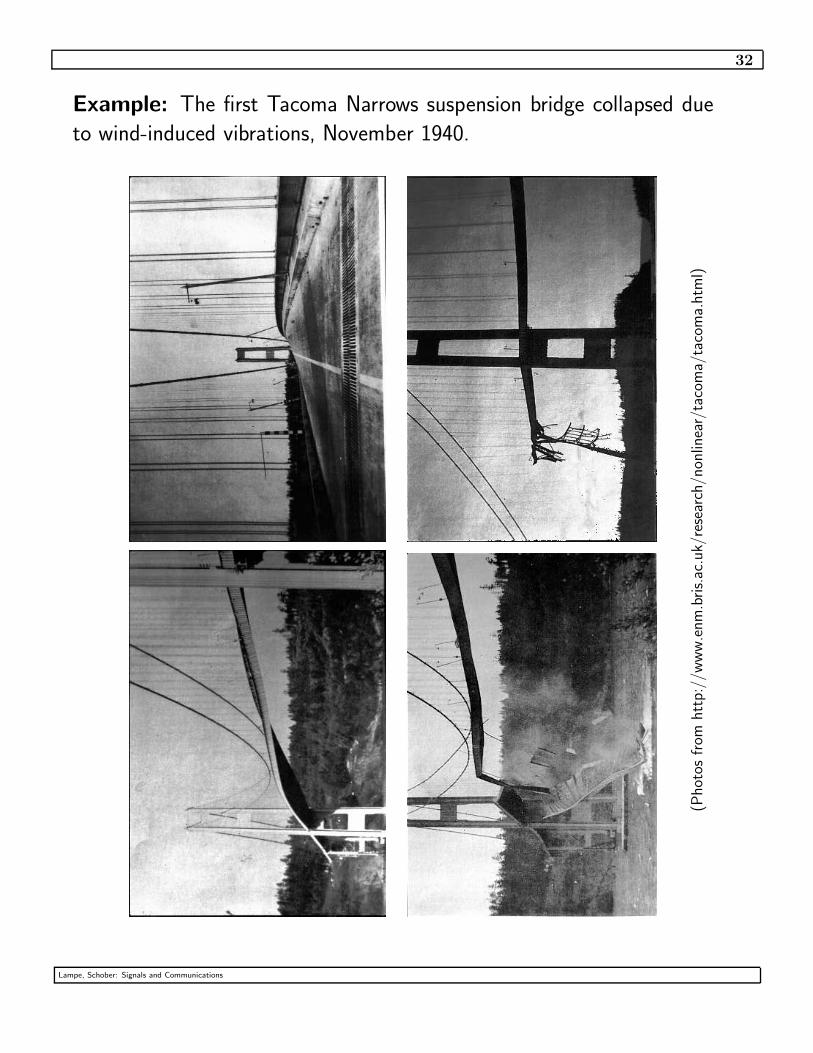
32
Example: The first Tacoma Narrows suspension bridge collapsed due
to wind-induced vibrations, November 1940.
(Phot
osfrom
htt
p:/
/ww
w.e
nm
.bris.ac
.uk/
rese
arch
/non
linea
r/ta
com
a/ta
com
a.htm
l)
Lampe, Schober: Signals and Communications