1 human role in lunar landing charles m. oman, ph.d. director, man vehicle laboratory massachusetts...
Post on 21-Dec-2015
214 views
TRANSCRIPT
1
Human Role in Lunar Landing
Charles M. Oman, Ph.D.
Director, Man Vehicle LaboratoryMassachusetts Institute of Technology
Sensorimotor Adaptation Research Team LeaderNational Space Biomedical Research Institute
Go for Lunar Landing: From Terminal Descent to Touchdown
Tempe, Arizona, March 4 2008
2
Human Role in Lunar Landing
• Technology has improved since Apollo but human brain has not.
• What is proper allocation of tasks between human and machine ?– Apollo 11 workload was “13 on a scale of 10”.– Crew needs support for autonomous time critical decision
making, e.g. landing site re-designation, abort, failure diagnosis.– Should pilot have final control authority, or just a vote ?– Will pilots trust automation ? – Automation surprise: “Why did it do that ?...” – Are modes intuitive ? “What’s it doing now ? What next ?”– Is automation clumsy to re-program ? – Can crew gracefully revert to lower automation levels, or must
they revert to full manual?

3
• Fully automatic landings to within 10 m of a touchdown point at well surveyed sites will be technically possible.
• Safety and certification costs considerations dictate “capability for manual control of flight path and attitude” (NASA HRR 8705.2A:34495)
• Crew will visually evaluate touchdown area, then approve, re-designate, or fly manually.
• Manual flight will likely remain the operational baseline. – As on Shuttle: “Train as you fly; fly as you train”– Astronauts are pilots and explorers, not cargo.
• Crew will have HUDs, cockpit map, profile, perspective terrain displays of 3D DEM terrain data and trajectory to enhance situation awareness and prevent geographic disorientation.
• Flight path predictors, recommended touchdown zones, and fuel range circles will aid decision making.
4
• 0.5 m terrain features aren’t visible to the naked eye till 4000 feet away. (5 arc min vs .5 for lidar)
• Humans have difficulty judging surface slope, smoothness, shape, and size– Shape-from-shading “Crater-Illusion”: craters seem convex,
rather than concave when viewed looking down-sun. – Shadow size depends on sun elevation.– Surface slope may be misjudged due to non-Lambertian
regolith reflectance, weak gravitational “down” cues.– Crater, boulder, and rock size is ambiguous – they occur in
all sizes.– Harder to judge distance due to lack of atmospheric light
scattering. Distant objects have unnaturally higher contrast, darker color.
– Does Earthshine alone provide sufficient illumination ?– Sensor images may be difficult to interpret.

5
• Handling qualities will be superior to Apollo LM.• Translations require large vehicle rotations. When
visual or vestibular cues are ambiguous, “sensory” PIOs are possible.
• During final descent:– Crew cannot see terrain directly beneath. Apollo style slow
forward translation keeps touchdown point in view.– Dust grayout below 50-100’ reduces visual altitude, attitude
and translation cues (e.g. A12, 15; helicopter “brownout” accidents)
– Streaming dust can create visual illusion of backward movement. LLTV did not model lunar visual environment.
• Conclusions:– Early human-in-the-loop simulation is critical for automation
development. Reduces subsequent need to “train around” design deficiencies !
– Simulators must accurately model both visual and motion cues.
• Research needed on e.g. sim dust models, motion washout, sensory PIOs.

6

7
Backups

8
Distance and Slope Judgment
9
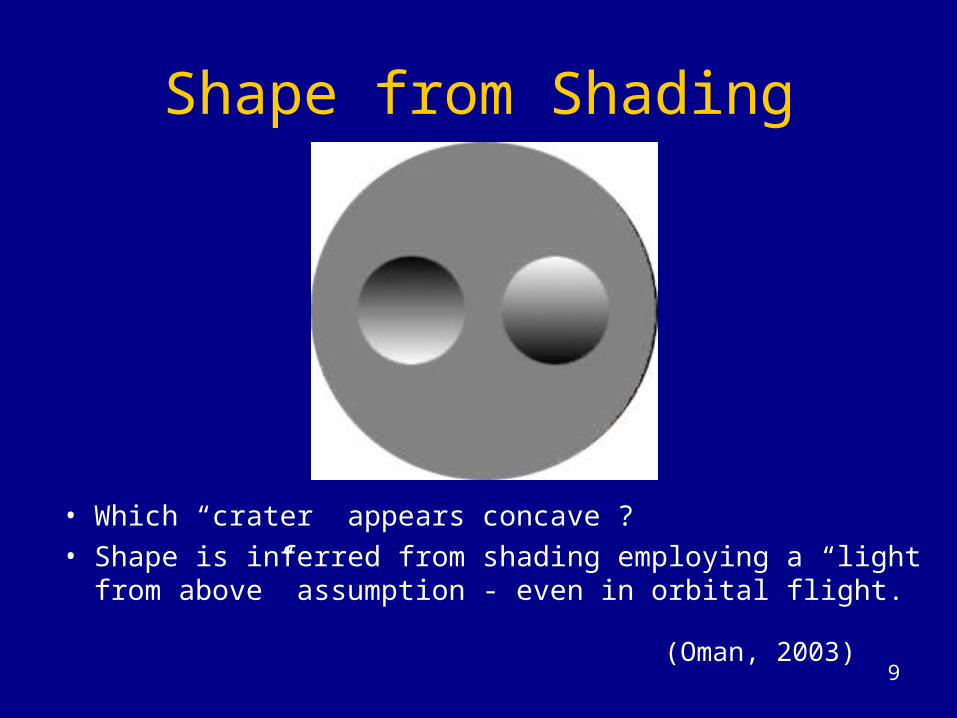
Shape from Shading
• Which “crater” appears concave ?• Shape is inferred from shading employing a “light from
above” assumption - even in orbital flight.
(Oman, 2003)
10
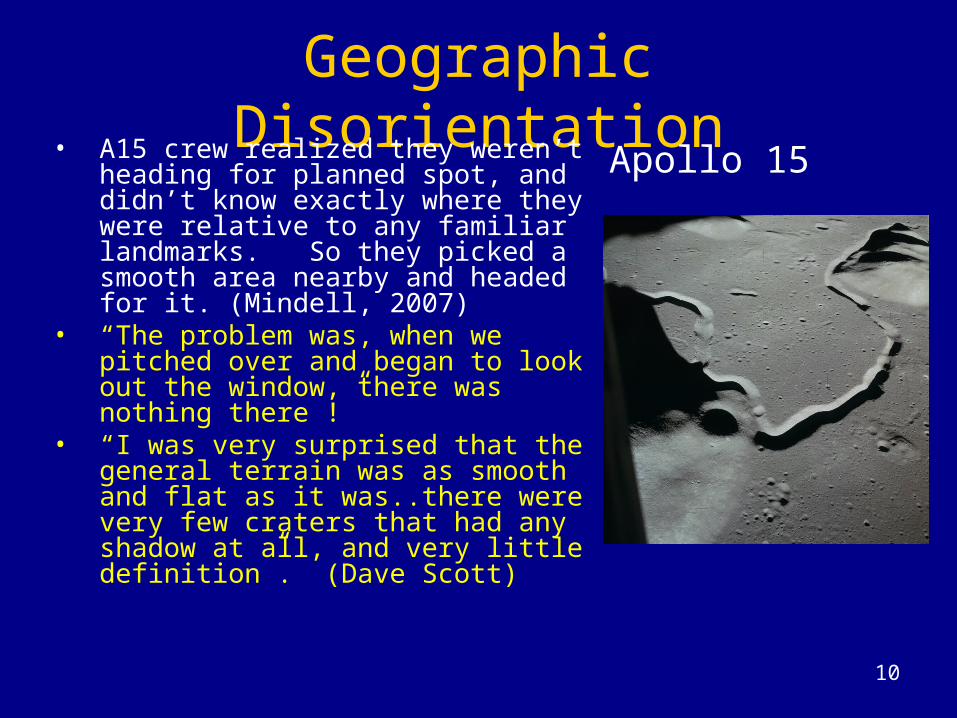
Geographic DisorientationApollo 15• A15 crew realized they weren’t
heading for planned spot, and didn’t know exactly where they were relative to any familiar landmarks. So they picked a smooth area nearby and headed for it. (Mindell, 2007)
• “The problem was, when we pitched over and began to look out the window, there was nothing there !”
• “I was very surprised that the general terrain was as smooth and flat as it was..there were very few craters that had any shadow at all, and very little definition”. (Dave Scott)

11
Landing Zone AssessmentApollo goal: touchdown on < 5
deg slope, < 2 ft. variationsPerceptual limitations:• Cognitive map includes only
large landmarks.• Fractal terrain, difficult to
remember/recognize.• 0.5 m landmarks become
visible at ~ 4000 feet.• Regolith reflectance is not
Earthlike (non-Lambertian)• Slope difficult to judge at
steep visual angles• Shading elevation cues are
ambiguous.• Light from behind/below can
make craters appear convex
Apollo 15

12
Dust Grayout
• Grayout at < 50-100’ causes progressive loss of horizon, altitude, position cues.
• “ I couldn’t tell what was underneath me; I knew it was a generally good area and I was just going to have to bite the bullet and land”, because I couldn’t tell whether there was a crater down there or not”.
• “It turned out there were more craters there than we realized, either because we didn’t look before the dust started or because the dust obscured them”
Pete Conrad, Apollo 12

13

14
• Crew cannot see below and behind. Must remain aware of the terrain beneath during descent.
• Apollo 15 landing gear overlapped edge of a small crater. Descent engine bell damaged by crater rim.
Touchdown Terrain Awareness
15
STS-3 unexplained PIO

16
Manual vs. Automatic• Constellation Lunar Lander will have autonomous
landing capability - needed for uncrewed operations.• NASA Spacecraft Human Rating Requirements
require capability for manual control of flight path and attitude.
• Apollo 14-17 LEMs had autoland capability - though it was never used. Why ?John Young: “Because the place we were landing was
saturated in craters and the automatic system didn’t know where the heck the craters were, and I could look out the window and see them. Why trust the automation anyways? You’re responsible for the landing. You know where you want to land when you look out the window and why don’t you make sure you land there?”
(Cummings, et al 2005)
17
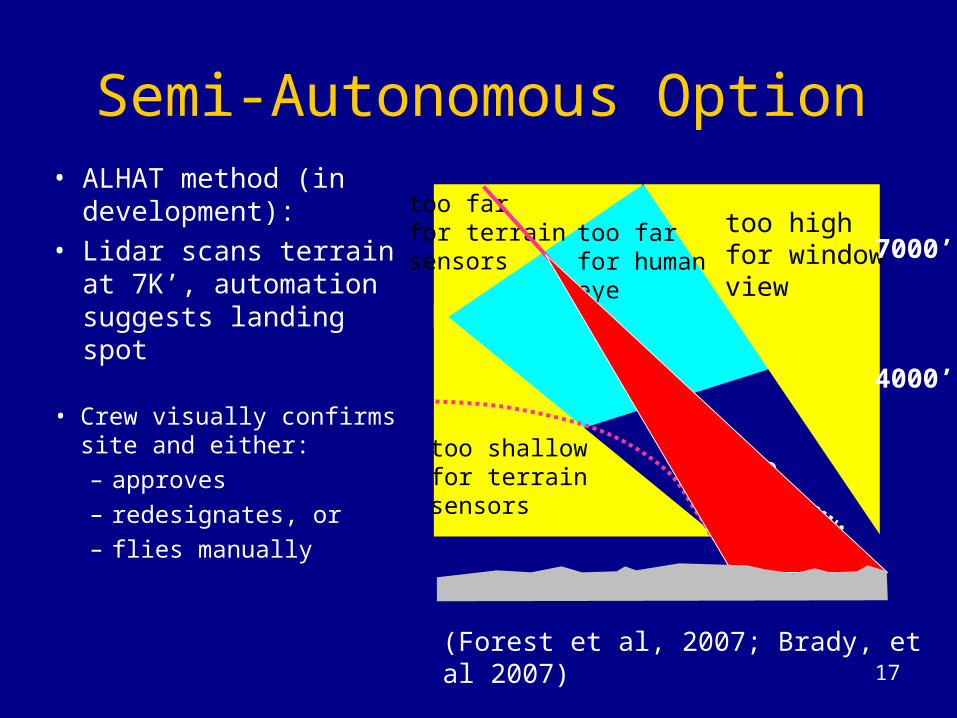
Semi-Autonomous Option
• Crew visually confirms site and either:– approves– redesignates, or– flies manually
too highfor windowview
too shallowfor terrainsensors
too farfor terrainsensors
too farfor humaneye
(Forest et al, 2007; Brady, et al 2007)
7000’
4000’
Apollo
• ALHAT method (in development):
• Lidar scans terrain at 7K’, automation suggests landing spot