1. 2 3.4 pareto linear programming the problem: p-opt cx s.t ax ≤ b x ≥ 0 where c is a kxn...
TRANSCRIPT

1
2
3.4 Pareto Linear Programming
• The Problem:
P-opt Cx
s.t
Ax ≤ b
x ≥ 0
where C is a kxn matrix so that
Cx = (c(1)x, c(2)x, ..., c(k)x)
where c(j) = jth row of C.

3
Example
• P- max {3x1 + 2x2, 2x1 – x2}
• S.t.
• x1 ≤ 2
• 3x1 + x2 ≤ 9
• x1, x2 ≥ 0
Here z = (z1, z2).
z1 z2

4
• We refer to the Pareto solutions also as efficient points, or non-dominated points.
• We shall focus on opt = max.
• For simplicity we shall assume that the set of feasible solution, namely
X := {x in Rn: Ax ≤ b, x ≥ 0}
is bounded.
• Let
Z:= {Cx: x in X}
observing that Z is a subset of Rk, and usually k <<<<<n.

5

6
We can solve for the efficient points graphically if we only have 2 variables and 2 objective functions.This also gives us a good picture of what is going on, and ideas for generalizing.
• P- max {3x1 + 2x2, 2x1 – x2}
• S.t.
• x1 ≤ 2
• 3x1 + x2 ≤ 9
• x1, x2 ≥ 0

7
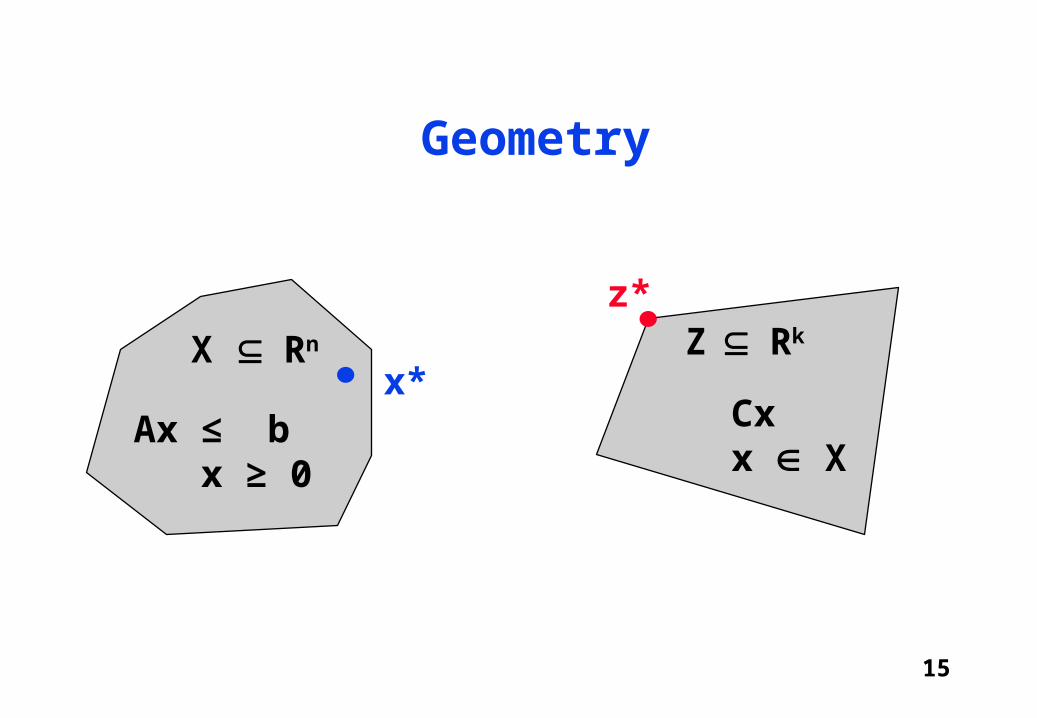
So more generally: Geometry
Ax ≤ b x ≥ 0
X Rn Z Rk
Cxx X
8
• P- max {3x1 + 2x2, 2x1 – x2}
• S.t.
• x1 ≤ 2
• 3x1 + x2 ≤ 9
• x1, x2 ≥ 0
Find X and Z for the problem below.

9
How do we generate all the Pareto Solutions?
• Idea:
• Generate the non-dominated extreme points of Z
• Use them to generate the other efficient points of Z.
• Rationale:
• Other efficient points of Z are convex combinations of the efficient extreme points of Z

10
k=2 (i.e 2-objectives)
z2
z1

11
k=2
z2
z1
Z

12
k=2
z2
z1
Z
Efficient points(Pareto solutions)

13
k=2
z2
z1
Z
Efficient points
Efficient extremepoints
Every efficient point can be expressed as a convex combination of the efficient extreme points. So we first aim to generate the efficient extreme points.

14
An extremely important theorem
• Idea:
• Theorem 4.6.1
• An extreme point of Z must be produced by an extreme point of X, ie if z* is an extreme point of Z then z*=Cx* where x* is an extreme point of X
• Proof:
• By contradiction. Assume that z* is an extreme point of Z but x* in X for which z*=Cx*, is not an extreme point of X.
15
Geometry
Ax ≤ b x ≥ 0
X Rn Z Rk
Cxx X
x*
z*

16
• Since x* is not an extreme point of X we have
x* = x’ + (1-)x” , 0 < < 1
for some points x’ and x” in X.
Thus,
z* = Cx* = C(x’ + (1-)x”)
= Cx’ + (1-)Cx”
= z’ + (1-)z” ,
(z’=Cx’, z”=Cx”)
This, however, contradicts the assertion that z* is an extreme point of Z.
(This is true only when z’ and z” are different and neither of z’ and z” is an extreme point)

17
Comment
Ax ≤ b x ≥ 0
X Rn Z Rk
Cxx X
x*
z*
If z* extreme then x* extreme.BUT not necessarily vice versa.
18

19
• One way to generate the efficient extreme points of Z is by deploying the following well known results:
• Theorem 4.6.2:
• If z* is an efficient point of Z then there must be a in Rk such that z* is an optimal solution to the problem:
• max { z: z in Z} (****)
i.e. max {z1+ z2+…+ zk : z in Z}
• Furthermore, > 0 (all components are strictly positive)

20
Theorem 4.6.3:
If > 0 then any optimal solution to
max {z1+ z2+…+ zk : z in Z} (****)
is an efficient point of Z.
21
• Proof of Theorem 4.6.3:
• Assume that > 0 and let z* be any optimal solution to (****). Contrary to the Theorem, assume that z* is not an efficient point of Z. This means that there exists some z’ in Z such that
• z’j ≥ z*j , for all j=1,2,...,k
• and
• z’p > z*p , for some 1 ≤ p ≤ k.
• (Remember that we mean Pareto-max here)
• Since >0, this implies that z’ > z*, contradicting the assertion that z* is an optimal solution to (****).

22
• Understanding Theorem 4.6.2 requires some fundamental results!!!
• We will omit slides 17 - 40 (not examinable).
• From slide 41 on is examinable.

23
Review(618-261)
• Convex set:
• If y’ and y” are elements of Y then the entire line segment connecting these points is also in Y.
• Line segment:
• Line segment connecting y’ and y” is the set of all the convex combinations of y’ and y”.
• Convex combinations:
• y =y’ + (1-)y” , 0 ≤ ≤ 1.

24

25
X1X2
X1X2
X1X2
Convex comb. of X1 and X2
Not convex comb. of X1 and X2
Extreme Points
• A point y in Y is an extreme point of Y if it cannot be expressed as a convex combination of two other points in Y.

26
2 extreme points
4 extreme points(the corners)
Entire boundary is extreme

27
Properties of Convex Sets
• If S is a convex set, then for any in R+,
S := {s: s in S}
is a convex set.
• If S and T are convex sets, then so is
S + T : = {s+t: s in S, t in T}
• The intersection of any collection of convex sets is convex.

28
origin
S
S
ST
S+TA
B

29
facts about hyperplanes
• Fact 1:
• Let be a non-zero element of Rn and let b be a real number. Then the set
H := {x in Rn: x = b}
is a hyperplane in Rn.
• Example:
• In R3, the set of all points satisfying
3x1 + 3x2 + x3 =5
is a hyperplane (set b=5 and = (3,3,1) )
30
• Fact 2:
• Let H be a hyperplane in Rn. Then there is a non-zero vector in Rn and a constant b such that
• H = S:= {x in Rn: x=b}.
31
bottom line
• A hyperplane in Rn is the set of solutions to a single linear equation.
32
Half Spaces
• Given a hyperplane, say
H := {x in Rn : x = b}
we shall consider the two closed half spaces it generates:
H+ := {x in Rn: x ≥ b}
H– := {x in Rn: x ≤ b}

33
H+
H–
H := {x in Rn: x=b}

34
Main Results(for our purposes)
• Theorem 4.6.4 Separating Hyperplanes
• Given a convex set S and a point x exterior to its closure*, there is a hyperplane containing x that contains S in one of its half spaces.
• Closure of S: the smallest closed set containing S.
• Closed set: A set with the property that any point that is arbitrarily close to it is a member of the set.

35
S
Hx

36
SH
x
x
S

37
• Theorem 4.6.5 Supporting Hyperplane
• Let S be a convex set and let x be a boundary point of S. Then there is a hyperplane containing x and containing S in one of its closed half spaces.
SSupporting hyperplane at x
x
38
• Theorem 4.6.6
• Let S be a convex set, H a supporting hyperplane of S and I the intersection of H and S.
• Then every extreme point of I is an extreme point of S.

39
One common extreme point
SH
I
S
H
I
two extreme points in common
Face
Facet

40
And so ......• For every extreme point in Z there is a
supporting hyperplane
• Each extreme point of Z is an optimal solution to max {z : z in Z} for some non zero in Rk.
41
And so ......• For each efficient extreme point of Z
there is a strictly positive in Rk such that the point is an optimal solution to max {z : z in Z}.
• Each extreme point of Z is an optimal solution to max {z : z in Z} for some non zero in Rk.
• And also
1 + + k = 1
(See supplementary notes for details).

42

43
Bottom line• We can generate the efficient extreme
points associated with
P-opt Cx
Ax ≤ b
x ≥ 0
by solving
max Cx
Ax ≤ b
x≥ 0
for all .

44
ExampleP−max{ 3x + x + 4x3 , x + 4x +3x3}
s.t.x + 3x + 5x3 ≤9
8x + 5x + x3 ≤79x + x + 4x3 ≤6
x + 5x + 3x3 ≤8x,x ,x3 ≥

45
• k=2
• Thus we need two multipliers 1 and 2.
• The objective function of the parametric linear programming problem will therefore be of the form:
z() := 1c(1)x + 2c(2)x
• But since the parameters are positive, we can divide say by 1, so obtain an equivalent objective function of the form
z() := c(1)x + c(2)x , =2 / 1
The parametric problem is thus:
C =3 44 3
⎡⎣⎢
⎤⎦⎥

46
• Note that varies from 0 to infinity but cannot equal 0.
max{3x1 + x + 4x3 +(x + 4x + 3x3)}s.t.
x + 3x + 5x3 ≤9
8x + 5x + x3 ≤79x + x + 4x3 ≤6
x + 5x + 3x3 ≤8x,x ,x3 ≥

47
z2
z1
Z
Efficient points
Efficient extremepoints

48
z2
z1
Z
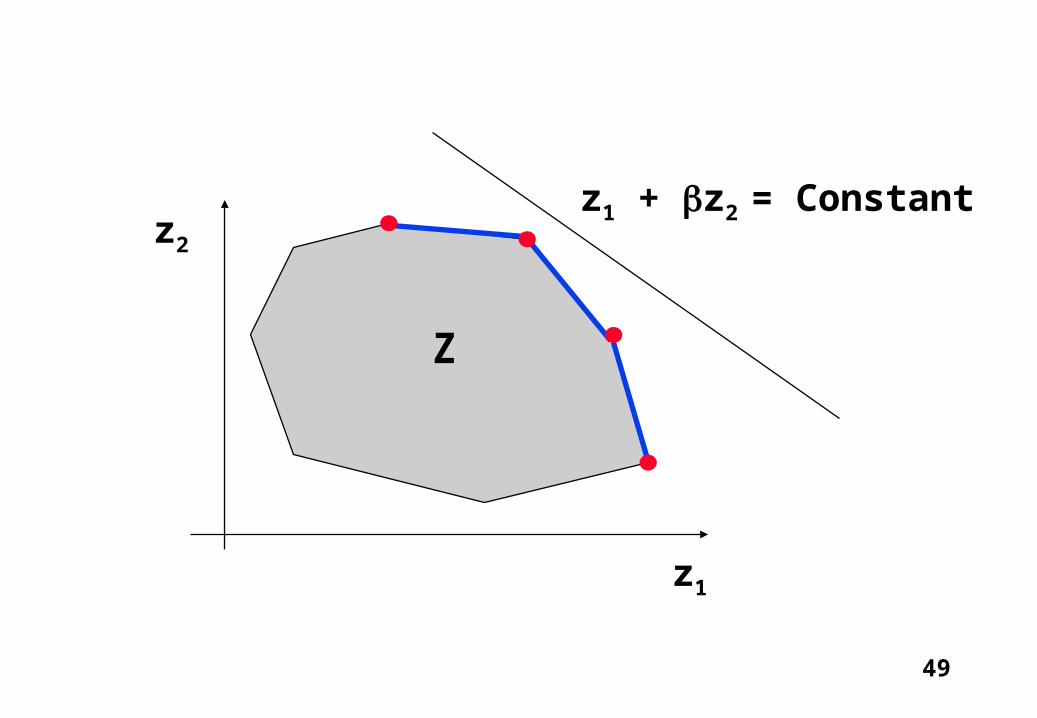
49
z2
z1
Z
z1 + z2 = Constant
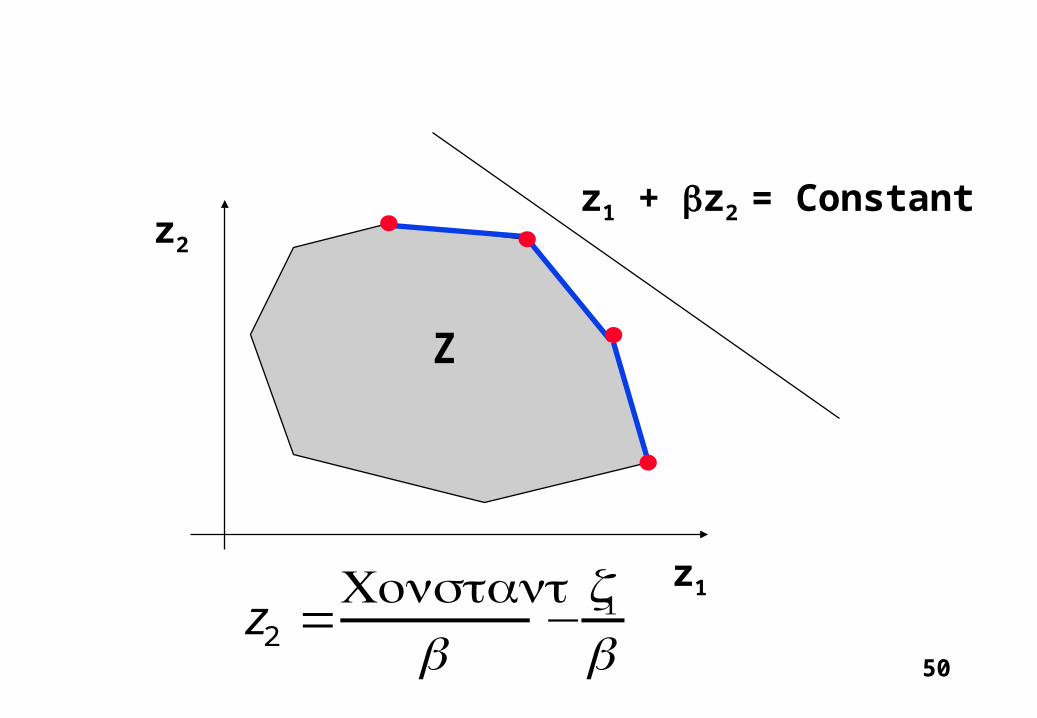
50
z2
z1
Z
z1 + z2 = Constant
z2 =Constant
−z
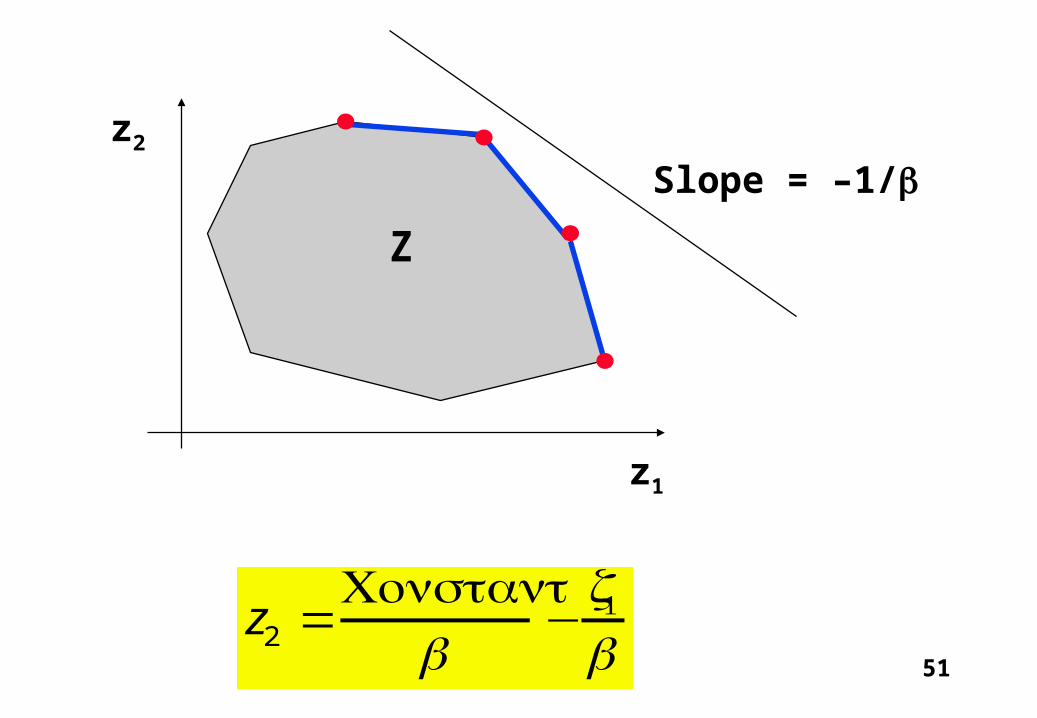
51
z2
z1
Z
Slope = –1/
z2 =Constant
−z

52
z2
z1
Z
Slope = 0

53
z2
z1
Z

54
z2
z1
Z

55
z2
z1
Z

56
z2
z1
Z

57
z2
z1
Z

58
z2
z1
Z
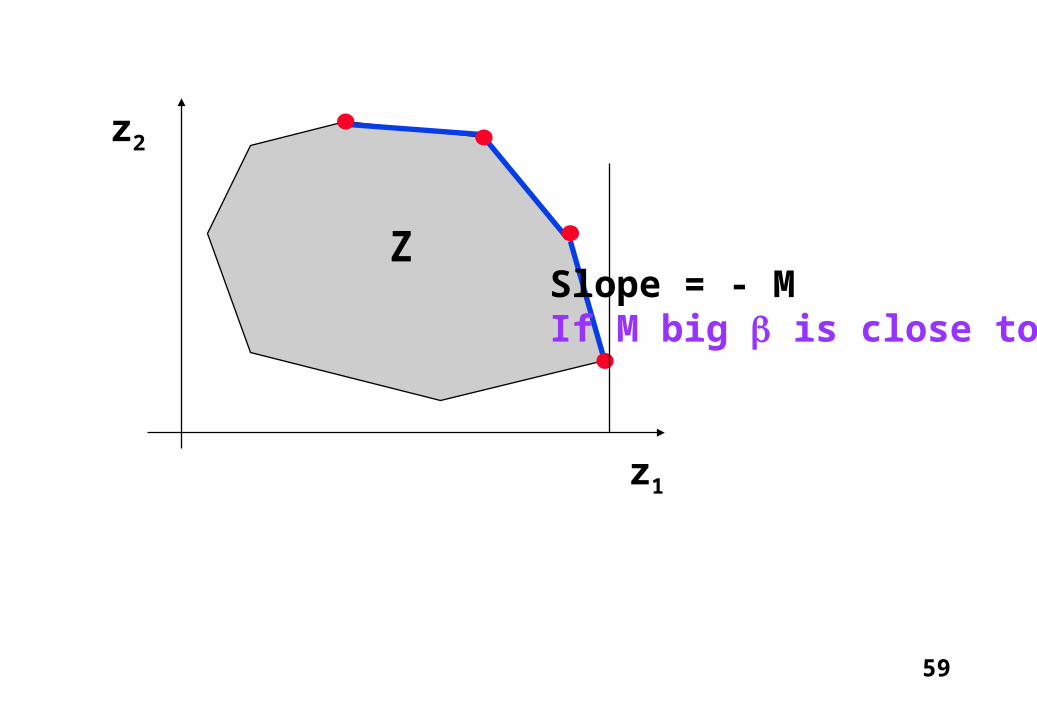
59
z2
z1
ZSlope = - MIf M big is close to 0.

60
Comments
• Read 618-261 Lecture Notes (Chapter 8) regarding changes in the objective function.
• In particular, changes to the cost coefficient of a basic variable (Why?)
• Check your result: We know something about the optimal values of the objective function as changes.

61
Parametric Linear Programming(Objective function)
• Set up:
• z*() := opt z():=c()x , 0 < < s.t.
Ax ≤ b
x ≥ 0
We want to generate the optimal solution x* as a function of the parameter . Symbolically we write it x*().
62
Procedure• Step 1: Initialization
• Set =0 and solve the resulting linear programming problem. This yields x*(0) and an “optimal” simplex tableau.
• Step 2: Range analysis
• Determine the largest value of for which the current optimal solution remains optimal, say *.
• Step 3: Stopping rule
• If = stop.
• Step 4: Iteration
• Construct the new optimal solution for * and go to Step 2.

63
Details
• Step 2: Range analysis
• This is done in the usual manner (618-261 chapter 8) using the optimality test for the reduced costs.
• Step 4: Iteration
• This involves the usual pivot operation which produces an adjacent extreme point (exchange of one basic and one non-basic variable).

64
Example
• Find all the Pareto extreme points of the following problem:
P− {max3x + 5x,x −x}s.t.x ≤4
x ≤3x + x ≤8
x,x ≥

65
To do this we solve
z* ( ):max{(3 2 )x1 (5 )x2
s.t.
x1 4
2x2 12
3x1 2x218
x1, x
2 0
}, for all >0.
z* () := {max3x + 5x +(x −x )}i.e.
(Hillier and Lieberman p. 308)
66
Step 1: initialization
• For =0 the objective function is z(0)=3x1+5x2.
• We solve the problem for this objective function in the usual (simplex) manner.

67
Final Tableau=0
x1 x2 x3 x4 x5 RHS x3 0 0 1 1/3 -1/3 2x2 0 1 0 0.5 0 6x1 1 0 0 -1/3 1/3 2Z 0 0 0 1.5 1 36
X1 = 2, X2 = 6x*(0) = (2,6)z*(0) = 36

68
Step 2: Range analysis
• We now increase from zero until a new (adjacent) optimal solution is generated.
• We determine the critical value of , call it * by introducing in the z-row of the final tableau.
• This typically involves solving a system of simple (range) inequalities (requiring the reduced costs to be non-negative).
69
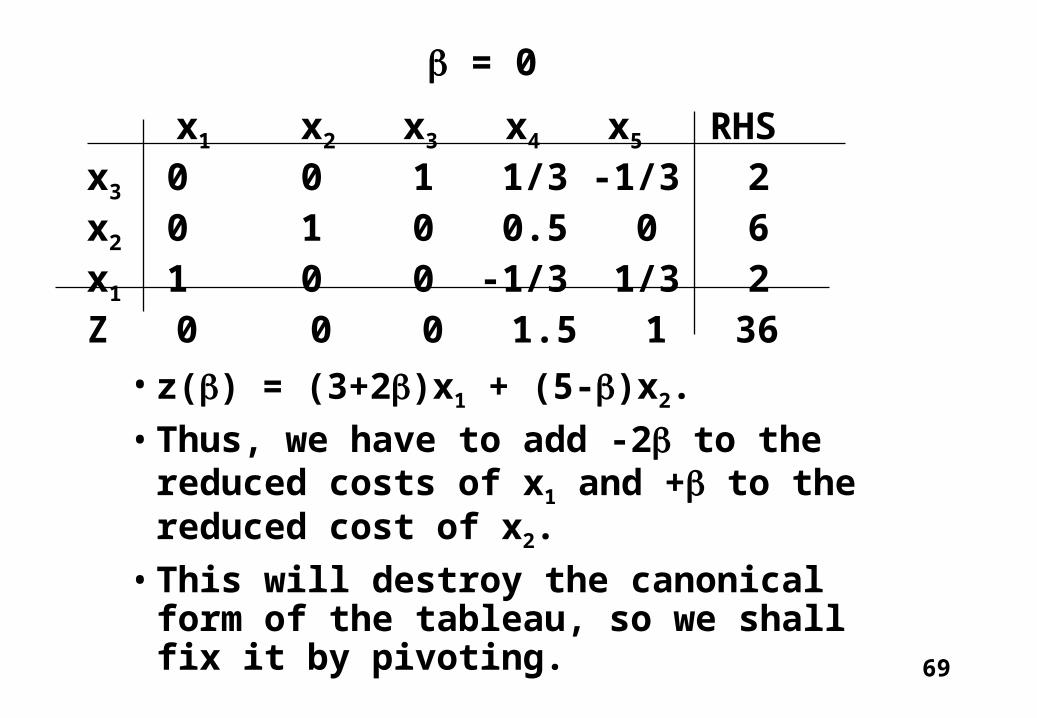
• z() = (3+2)x1 + (5-)x2.
• Thus, we have to add -2 to the reduced costs of x1 and + to the reduced cost of x2.
• This will destroy the canonical form of the tableau, so we shall fix it by pivoting.
x1 x2 x3 x4 x5 RHS x3 0 0 1 1/3 -1/3 2x2 0 1 0 0.5 0 6x1 1 0 0 -1/3 1/3 2Z 0 0 0 1.5 1 36
= 0

70
• To restore the canonical form we have to fix the z-row (2 pivot operations)
x1 x2 x3 x4 x5 RHS x3 0 0 1 1/3 -1/3 2x2 0 1 0 0.5 0 6x1 1 0 0 -1/3 1/3 2Z -2 0 1.5 1 36

71
• This tableau is optimal if
1.5 - 7/6 ≥ 0 (and 1+ 2/3≥0)I.e if 0 ≤ ≤ 9/7• yielding *=9/7.
• X*((2,6), z*(36-20 ≤ ≤ 9/7.
x1 x2 x3 x4 x5 RHS x3 0 0 1 1/3 -1/3 2x2 0 1 0 0.5 0 6x1 1 0 0 -1/3 1/3 2Z 0 0 (1.5-7/6) (1+ 2/3) 36-2
72
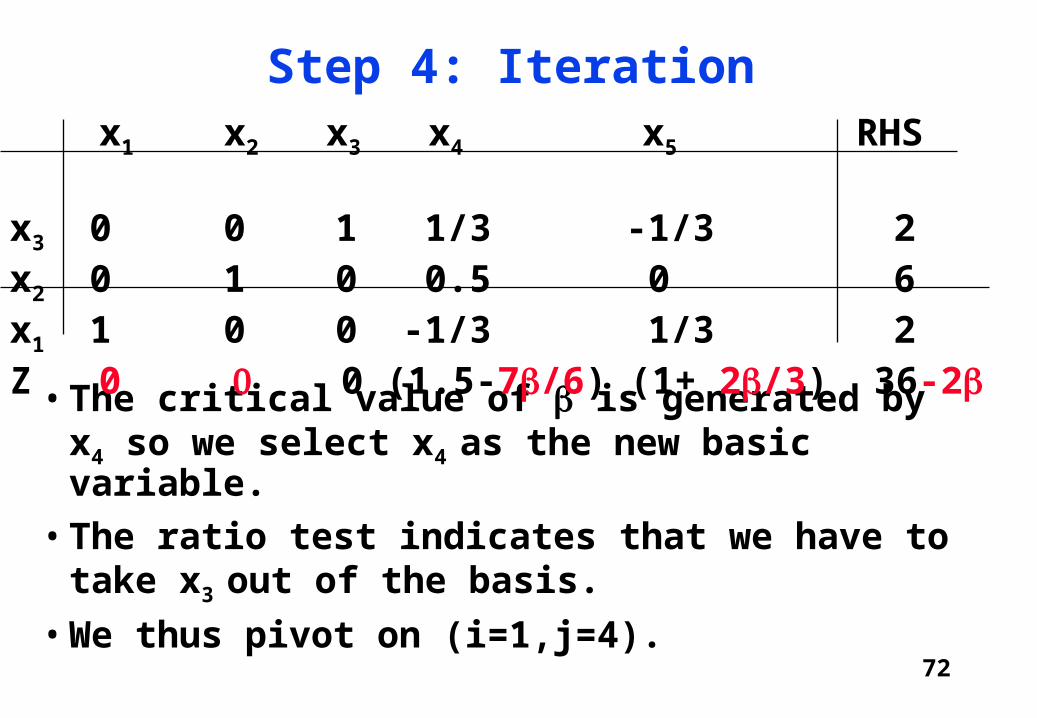
Step 4: Iteration
• The critical value of is generated by x4 so we select x4 as the new basic variable.
• The ratio test indicates that we have to take x3
out of the basis.
• We thus pivot on (i=1,j=4).
x1 x2 x3 x4 x5 RHS x3 0 0 1 1/3 -1/3 2x2 0 1 0 0.5 0 6x1 1 0 0 -1/3 1/3 2Z 0 0 (1.5-7/6) (1+ 2/3) 36-2

73
• So now we repeat the iteration in the context of the new basic solution.
x1 x2 x3 x4 x5 RHS x4 0 0 3 1 -1 6x2 0 1 -3/2 0 0.5 3x1 1 0 0 0 0 4Z 0 0 (-9/2+7/2) 0 (2.5-/2) (27+5
This is optimal if -9/2+7/2 ≥ 0 and 2.5-/2≥ 0i.e. 9/7≤ ≤5, x*( = (4,3), z* *( = (27 + 5 * = 5.

74
Step 4: Iteration
• the variable yielding the critical value of is x5 thus we enter x5 into the basis.
• the ratio test indicates that we take x2 out of the basis.
• Thus, we pivot on (i=2,j=5).
x1 x2 x3 x4 x5 RHS x4 0 0 3 1 -1 6x2 0 1 -3/2 0 0.5 3x1 1 0 0 0 0 4Z 0 0 (-9/2+7/2) 0 (2.5-/2) (27+5

75
• This is optimal if ≥ 5.
• X* ( =(4,0), z* ( =12 +8*= • Stop.
• The extreme points are x = (2,6), (4,3), (4,0) and corresponding efficient extreme points are (36, -2), (27, 5), (12, 8) .
x1 x2 x3 x4 x5 RHS x4 0 2 0 1 0 2x5 0 2 -3 0 1 6x1 1 0 1 0 0 4Z 0 -5+ 3+2 0 0 12+8
76
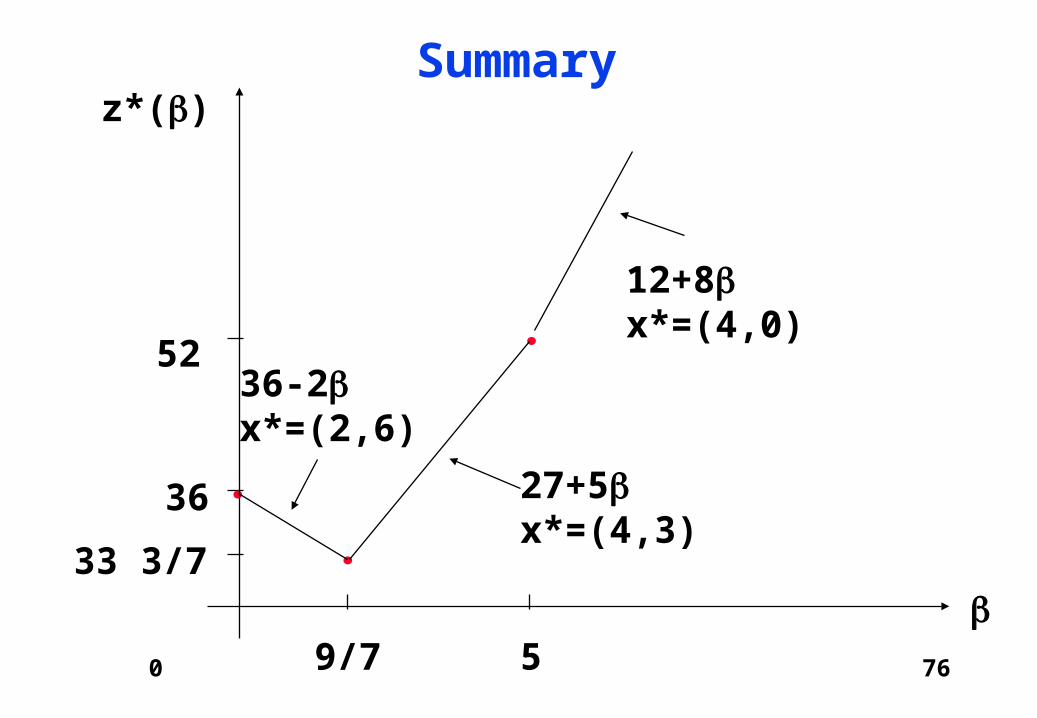
Summary
0
z*()
36
9/7
33 3/7
5
5236-2x*=(2,6)
27+5x*=(4,3)
12+8x*=(4,0)

77
Geometry
z* ():=max(3 + )x + (5−)xs.t.
x ≤4x ≤
3x + x ≤8x,x ≥

78
x2
x1
1
2
3
4
5
1 2 3 4 5 6 7 8 9
6
7
8
9
Feasible set
79
x2
x1
1
2
3
4
5
1 2 3 4 5 6 7 8 9
6
7
8
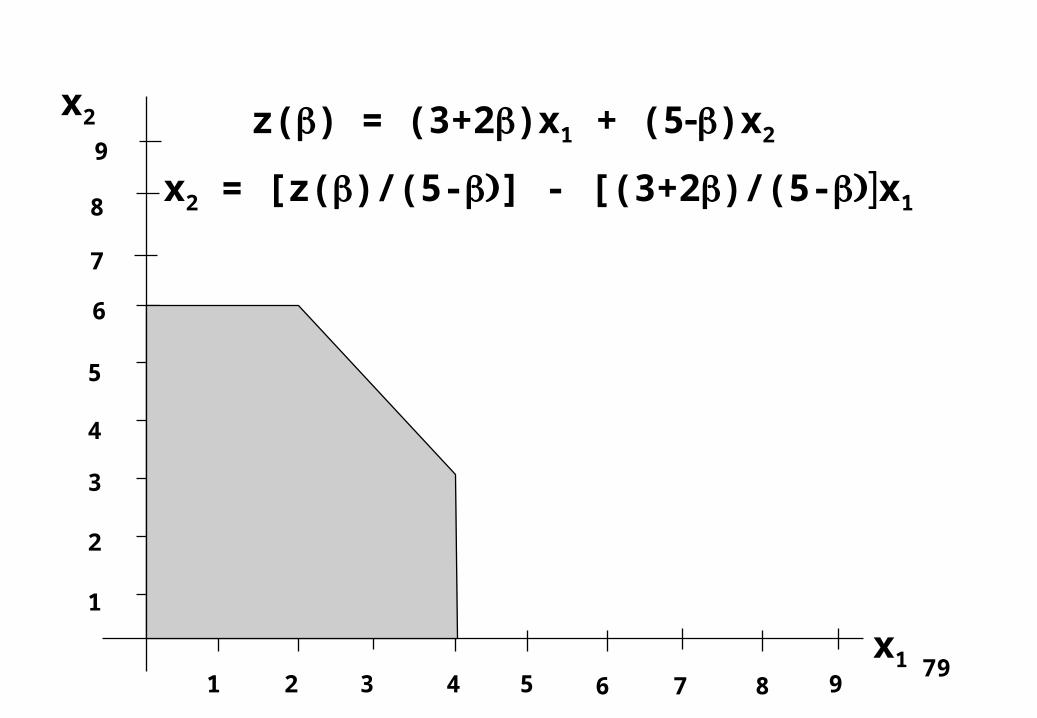
9z() = (3+2)x1 + (5)x2
x2 = [z()/(5-] - [(3+2)/(5-x1

80
x2
x1
1
2
3
4
5
1 2 3 4 5 6 7 8 9
6
7
8
9z() = (3+2)x1 + (5)x2
x2 = [z()/(5-] - [(3+2)/(5-x1

81
x2
x1
1
2
3
4
5
1 2 3 4 5 6 7 8 9
6
7
8
9z() = 3x1 + 5x2
x2 = (z()/5) - (3/5)x1

82
x2
x1
1
2
3
4
5
1 2 3 4 5 6 7 8 9
6
7
8
9z() = 7x1 + 3x2
x2 = [z()/3] - (7/3)x1

83
x2
x1
1
2
3
4
5
1 2 3 4 5 6 7 8 9
6
7
8
9z(5) = 13x1

84
Some Results
• Consider the parametric problem:
L() := max {f(x) + g(x): x in X}, in R
• Theorem:
The set of ’s for which the same x in X is optimal is convex.
Theorem:
Then, L() is convex with . Furthermore, if there are finitely many optimal solutions, then, L() is piecewise linear.

85
for in R, X is discrete
L() := max {f(x) + g(x): x in X}, in R
L()
The same x is optimalfor all in this range