© copyright 2007 abb all right reserved. · we reserve all rights in this document and in the...
TRANSCRIPT
We
rese
rve
all r
ight
s in
this
doc
umen
t and
in th
e in
form
atio
n co
ntai
ned
ther
ein.
Rep
rodu
ctio
n, u
se o
r di
sclo
sure
to th
ird p
artie
s w
ithou
t exp
ress
aut
horit
y is
stri
ctly
forb
idde
n. ©
Cop
yrig
ht 2
003
ABB
Latest revision:
Prepared by, date: Approved by, date:
Lab/Office:
COPYRIGHT pageTitle page/cover sheet
Status:
Document no.
3HAC021351-003
Plant:Location:Sublocation:
Rev. Ind
=++
IRB1600Manipulator
01PageNextTotal
1215
Approved2007-03-19
The information in this document is subject to change without notice and should not be construed as a commitment by ABB. ABB assumes no responsibility for any errors that may appear in this document.
Except as may be expressly stated anywhere in this document, nothing herein shall be construed as anykind of guarantee or warranty by ABB for losses, damages to persons or property, fitness for aspecific purpose or the like.
In no event shall ABB be liable for incidental or consequential damages arising from use of this document.
This document and parts thereof must not be reproduced or copied without ABB's written permission,and contents therof must not be imparted to a third party nor be used for any unauthorized purpose.Contravention will be prosecuted.
Additional copies of this document may be obtained from ABB at its then current charge.
© Copyright 2007 ABB ALL right reserved.
ABB Automation Technologies ABRobotics
SE-721 68 VästeråsSweden
We
rese
rve
all r
ight
s in
this
doc
umen
t and
in th
e in
form
atio
n co
ntai
ned
ther
ein.
Rep
rodu
ctio
n, u
se o
r di
sclo
sure
to th
ird p
artie
s w
ithou
t exp
ress
aut
horit
y is
stri
ctly
forb
idde
n. ©
Cop
yrig
ht 2
003
ABB
Latest revision:
Prepared by, date: Approved by, date:
Lab/Office:
TITLE PAGETitle page/cover sheet
Status:
Document no.
3HAC021351-003
Plant:Location:Sublocation:
Rev. Ind
=++
IRB1600Manipulator
01PageNextTotal
21115
Approved2007-03-19
ManufactureType
Control cabinetMains voltageSupplyControl voltageYear of construction
2007-03-22:::
::::
Type of installation
CustomerRobot serial number(s)Drawing numberDrawing version
Manipulator
::::
:
Project startProject managerLast revisionDesigned byDesigned dateNumber of pages
:::::::
sestper2007-03-2215
Prepared by, date:20
We
rese
rve
all r
ight
s in
this
doc
umen
t and
in th
e in
form
atio
n co
ntai
ned
ther
ein.
Rep
rodu
ctio
n, u
se o
r di
sclo
sure
to th
ird p
artie
s w
ithou
t exp
ress
aut
horit
y is
stri
ctly
forb
idde
n. ©
Cop
yrig
ht 2
003
ABB
Page 11
15Total3HAC021351-003
Latest revision:
Approved by, date:
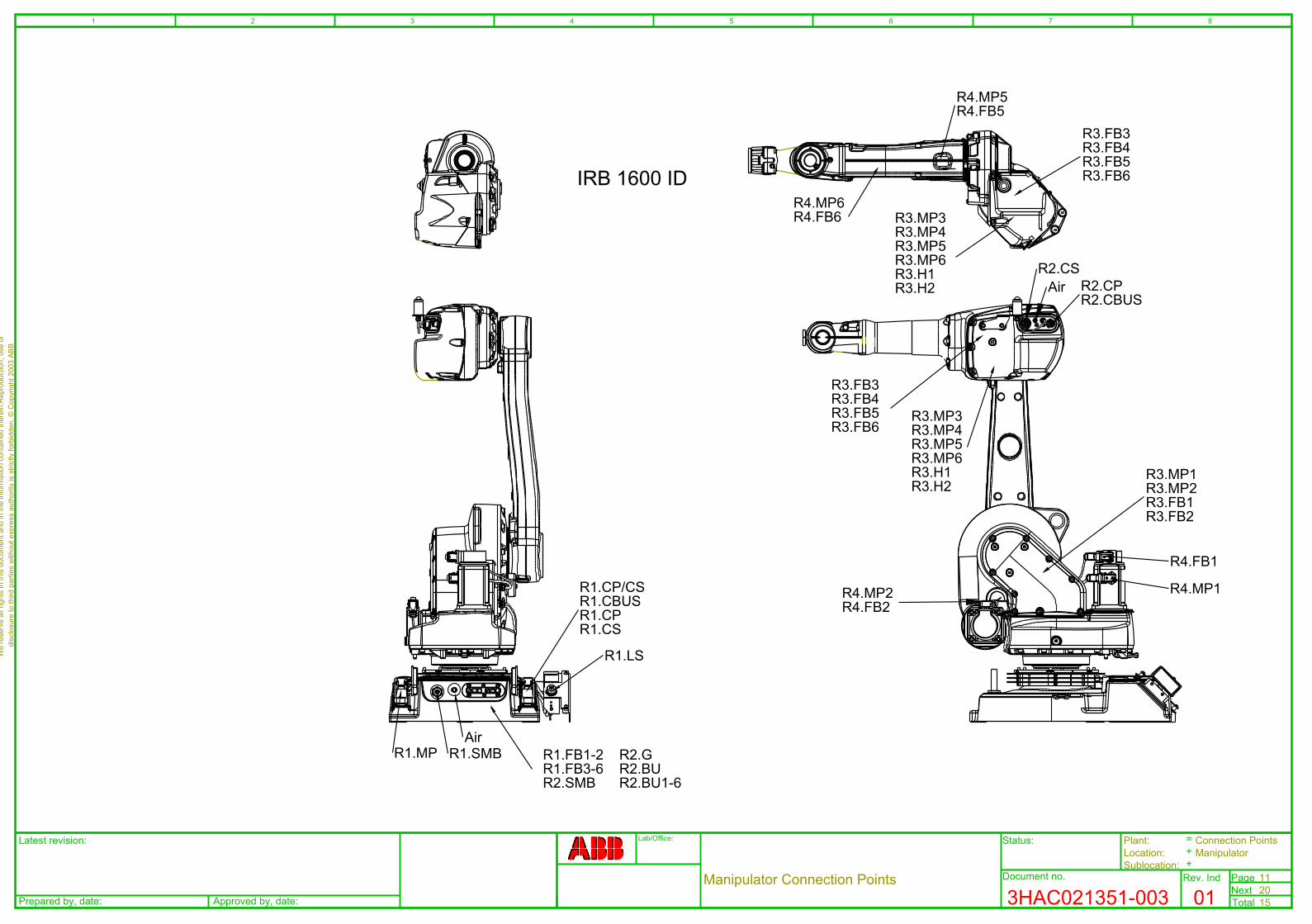
Manipulator Connection Points
Location:Plant: =
++Sublocation:
Connection PointsManipulator
Document no.Next
Rev. Ind
01
Lab/Office: Status:
1 2 3 4 5 6 7 8
R3.MP1R3.MP2R3.FB1R3.FB2
R4.MP1
R4.FB1
R4.MP2R4.FB2
Air R2.CPR2.CBUS
R2.CS
R3.MP3R3.MP4R3.MP5R3.MP6R3.H1R3.H2
R3.MP3R3.MP4R3.MP5R3.MP6R3.H1R3.H2
R3.FB3R3.FB4R3.FB5R3.FB6
R3.FB3R3.FB4R3.FB5R3.FB6
R4.MP6R4.FB6
R4.MP5R4.FB5
IRB 1600 ID
AirR1.SMBR1.MP R1.FB1-2 R2.G
R1.FB3-6 R2.BUR2.SMB R2.BU1-6
R1.CP/CSR1.CBUSR1.CPR1.CS
R1.LS

Prepared by, date:21
We
rese
rve
all r
ight
s in
this
doc
umen
t and
in th
e in
form
atio
n co
ntai
ned
ther
ein.
Rep
rodu
ctio
n, u
se o
r di
sclo
sure
to th
ird p
artie
s w
ithou
t exp
ress
aut
horit
y is
stri
ctly
forb
idde
n. ©
Cop
yrig
ht 2
003
ABB
Page 20
15Total3HAC021351-003
Latest revision:
Approved by, date:
Brake Release Unit Location:Plant: =
++Sublocation:
IRB1600BU
Document no.Next
Rev. Ind
01
Lab/Office: Status:Approved
2007-03-19
1 2 3 4 5 6 7 8
Brake Bleed Circuit
Brake Bleed Circuit
Brake Bleed Circuit
Brake Bleed Circuit
Brake Bleed Circuit
Brake Bleed Circuit
-BU Brake Release (Simplified)1
3
2
1
2
3
1
KA
KA
KA
KA
KA
KA
B8
-R1.MPC8
C9
C10
B7
BRAKE PB
BRAKE REL
0V BRAKE
BRAKE REL
0V BRAKE
B4
B3
C2
C1
BU
BU
BU
BU
BU
EXT LIM 2 BU
EXT LIM 1
LIM 2
LIM 1
BU
BU
BU
-2
-PE
-PE
-4
-1
-3
-8
-7
-10
-9
-14
-13
-16
-15
-5
-6
-11
-12
-1
-2
-3
-4
-5
-6
-7
-8
-9
-10
-11
-12
-13
-14
-15
-16
-BRAKE REL 1 / +AXIS 1/22.1
-0V BRAKE 1 / +AXIS 1/22.1
-BRAKE REL 2 / +AXIS 2/23.2
-0V BRAKE 2 / +AXIS 2/23.2
-BRAKE REL 3 / +AXIS 3/24.2
-BRAKE REL 4 / +AXIS 4/25.2
-PTC2 / +AXIS 2/23.2
-BRAKE REL 5 / +AXIS 5/26.2+AXIS 5 IRB1600ID/28.2
-BRAKE REL 6 / +AXIS 6/27.2+AXIS 6 IRB1600ID/29.2
-0V BRAKE 5 / +AXIS 5/26.2+AXIS 5 IRB1600ID/28.2
-0V BRAKE 6 / +AXIS 6/27.2
R2.BUR2.BU1-6
-PTC6 / +AXIS 6/27.2+AXIS 6 IRB1600ID/29.2
GNYE
Prepared by, date:22
We
rese
rve
all r
ight
s in
this
doc
umen
t and
in th
e in
form
atio
n co
ntai
ned
ther
ein.
Rep
rodu
ctio
n, u
se o
r di
sclo
sure
to th
ird p
artie
s w
ithou
t exp
ress
aut
horit
y is
stri
ctly
forb
idde
n. ©
Cop
yrig
ht 2
003
ABB
Page 21
15Total3HAC021351-003
Latest revision:
Approved by, date:
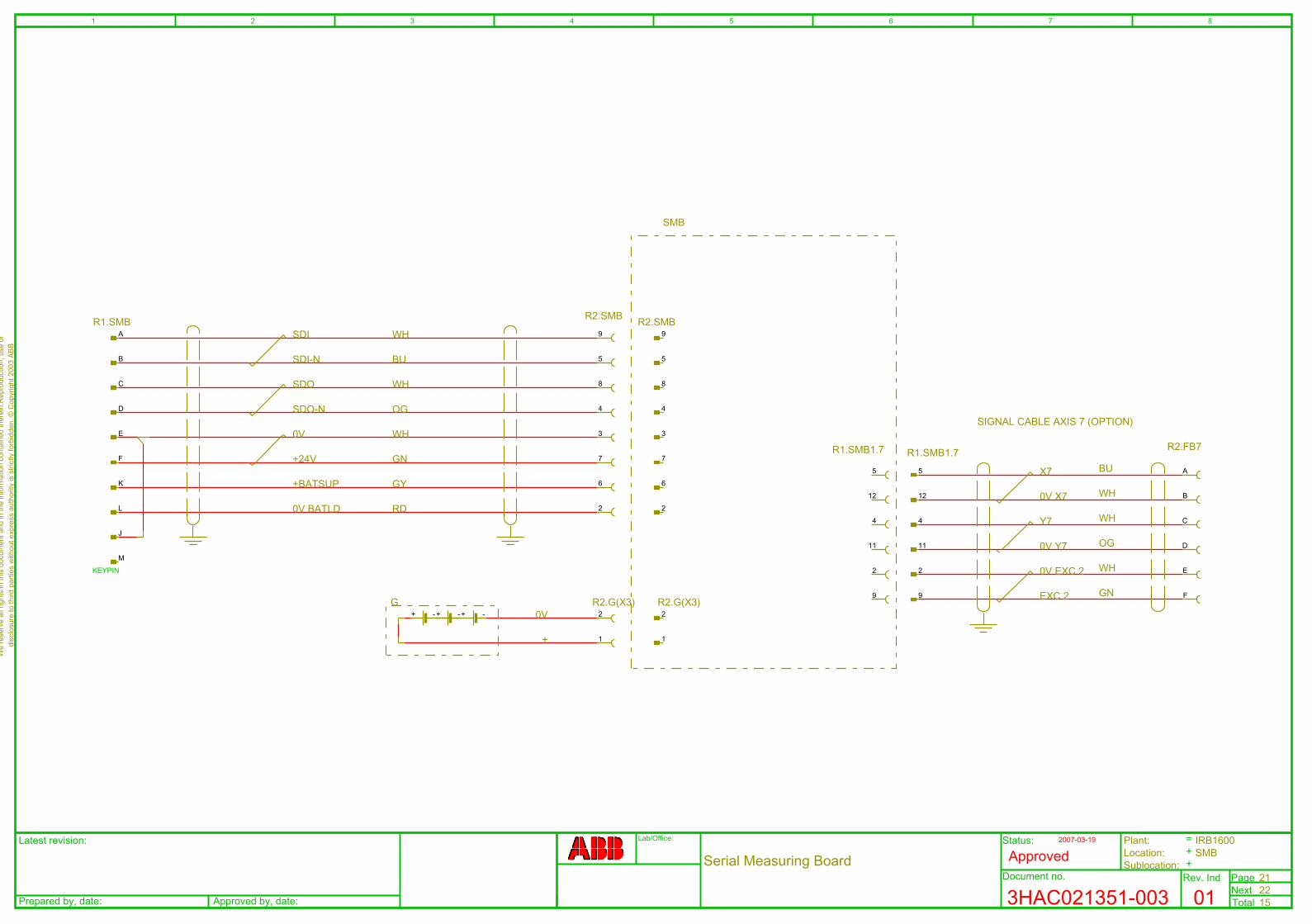
Serial Measuring Board Location:Plant: =
++Sublocation:
IRB1600SMB
Document no.Next
Rev. Ind
01
Lab/Office: Status:Approved
2007-03-19
1 2 3 4 5 6 7 8
A
B
C
D
E
F
K
KEYPINM
R1.SMBSDI
SDI-N
SDO
SDO-N
0V
+24V
+BATSUP
0V BATLD
WH
BU
WH
OG
WH
GN
GY
RD
G+ - + - + - 0V
+
9
5
8
4
3
7
2
1
R2.SMB
R2.G(X3)
SMB
9
5
8
4
3
7
2
1
R2.SMB
R2.G(X3)
6
2L
J
6
2
9
2
11
4
12
5 A
B
C
D
E
F
5
12
4
11
2
9
R1.SMB1.7 R2.FB7
X7
0V X7
Y7
0V Y7
0V EXC 2
EXC 2
SIGNAL CABLE AXIS 7 (OPTION)
R1.SMB1.7
BU
WH
WH
OG
WH
GN

Prepared by, date:23
We
rese
rve
all r
ight
s in
this
doc
umen
t and
in th
e in
form
atio
n co
ntai
ned
ther
ein.
Rep
rodu
ctio
n, u
se o
r di
sclo
sure
to th
ird p
artie
s w
ithou
t exp
ress
aut
horit
y is
stri
ctly
forb
idde
n. ©
Cop
yrig
ht 2
003
ABB
Page 22
15Total3HAC021351-003
Latest revision:
Approved by, date:
Axis 1 Location:Plant: =
++Sublocation:
IRB1600AXIS 1
Document no.Next
Rev. Ind
01
Lab/Office: Status:Approved
2007-03-19
1 2 3 4 5 6 7 8
-R1.MPA1
A2
A3
1
2
3
2
3
2
3
GNYE
M3 ~
S (V)
T (W)
R (U) PE
Brake
1
2
3
PE
7
8
-PE PE
7
8
5B2 5
4
1
5
2
6
3
Resolver
-R4.FB1-4
1
5
2
6
3
-SMB
+AXIS 2/23.1+AXIS 3/24.1+AXIS 4/25.1+AXIS 5/26.1+AXIS 6/27.1
+AXIS 5 IRB1600ID/28.1+AXIS 6 IRB1600ID/29.1
2
14
3
15
6
18
14
3
15
6
18
1.1
1.2
1.3
M1R
M1S
M1T
M1R
M1S
M1T
GNYEPE
BRAKE REL.1
0V BRAKE.1
PTC1
WHBU
BU
WHOG
OG
GN
WHGN
X1
0V X1
Y1
0V Y1
0V EXC
EXC
1.10
1.12
1.11
M1R
M1S
M1T
BRAKE REL.1
0V BRAKE.1
9 9
6 6
7 7
8 8
1.4
1.5
1.6
6
1
7
2
3
8
6
1
7
2
8
3
GY
WH
VT
WH
WH
BU
X1
0V X1
Y1
0V Y1
0V EXC
EXC
-R4.MP1
-MU1
-R3.FB1
1
-R3.MP1
2
-R2.FB1-2
-FB1
+BU/20.7 / +BU-BRAKE REL 1
+BU/20.7 / +BU-0V BRAKE 1
A5-PTC12 / +AXIS 2/23.4
-PE12 / +AXIS 2/23.4
1
PE 1.8
1
2
3
4
5
Prepared by, date:24
We
rese
rve
all r
ight
s in
this
doc
umen
t and
in th
e in
form
atio
n co
ntai
ned
ther
ein.
Rep
rodu
ctio
n, u
se o
r di
sclo
sure
to th
ird p
artie
s w
ithou
t exp
ress
aut
horit
y is
stri
ctly
forb
idde
n. ©
Cop
yrig
ht 2
003
ABB
Page 23
15Total3HAC021351-003
Latest revision:
Approved by, date:
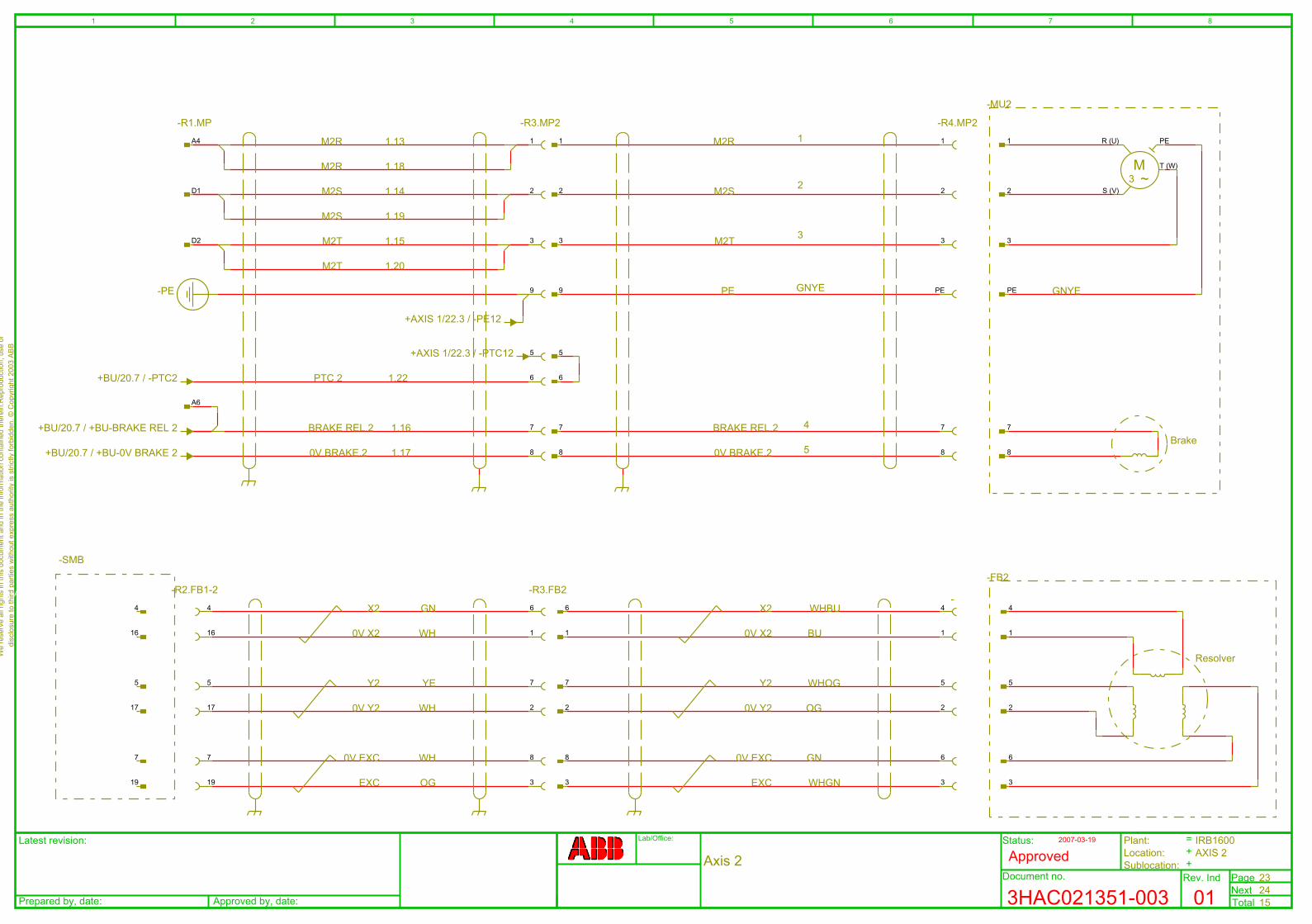
Axis 2 Location:Plant: =
++Sublocation:
IRB1600AXIS 2
Document no.Next
Rev. Ind
01
Lab/Office: Status:Approved
2007-03-19
1 2 3 4 5 6 7 8
-SMB
+AXIS 1/22.1
4
16
5
17
7
19
-PE
D1
D2
16
5
17
7
19
1.14
1.19
M2R
M2R
M2S
M2S
M2T
M2T
GN
WH
YE
WH
WH
OG
0V BRAKE.2
BRAKE REL.2
1.13
1.18
1.15
1.20
1.16
1.17
X2
0V X2
Y2
0V Y2
0V EXC
EXC
1
3
9
5
6
7
8
6
1
7
2
8
3
1
2
3
9
5
6
7
8
6
1
7
2
8
3
M2R
M2S
M2T
PE
BRAKE REL.2
0V BRAKE.2
BU
OG
GN
WHBU
WHOG
WHGN
X2
0V X2
Y2
0V Y2
0V EXC
EXC
-4
1
5
2
6
3
2
3
PE
7
8
1
2
3
PE
7
8
4
1
5
2
6
3
GNYE
M3 ~
S (V)
T (W)
R (U) PE
Brake
Resolver
1
2
-R1.MP -R4.MP2
-R3.FB2
-MU2
-FB2
A4
-R3.MP2
4
-R2.FB1-2
+BU/20.7 / +BU-BRAKE REL 2
+BU/20.7 / +BU-0V BRAKE 2
+AXIS 1/22.3 / -PTC12
+BU/20.7 / -PTC2 PTC 2 1.22
A6
+AXIS 1/22.3 / -PE12
1
2
3
4
5
GNYE
Prepared by, date:25
We
rese
rve
all r
ight
s in
this
doc
umen
t and
in th
e in
form
atio
n co
ntai
ned
ther
ein.
Rep
rodu
ctio
n, u
se o
r di
sclo
sure
to th
ird p
artie
s w
ithou
t exp
ress
aut
horit
y is
stri
ctly
forb
idde
n. ©
Cop
yrig
ht 2
003
ABB
Page 24
15Total3HAC021351-003
Latest revision:
Approved by, date:
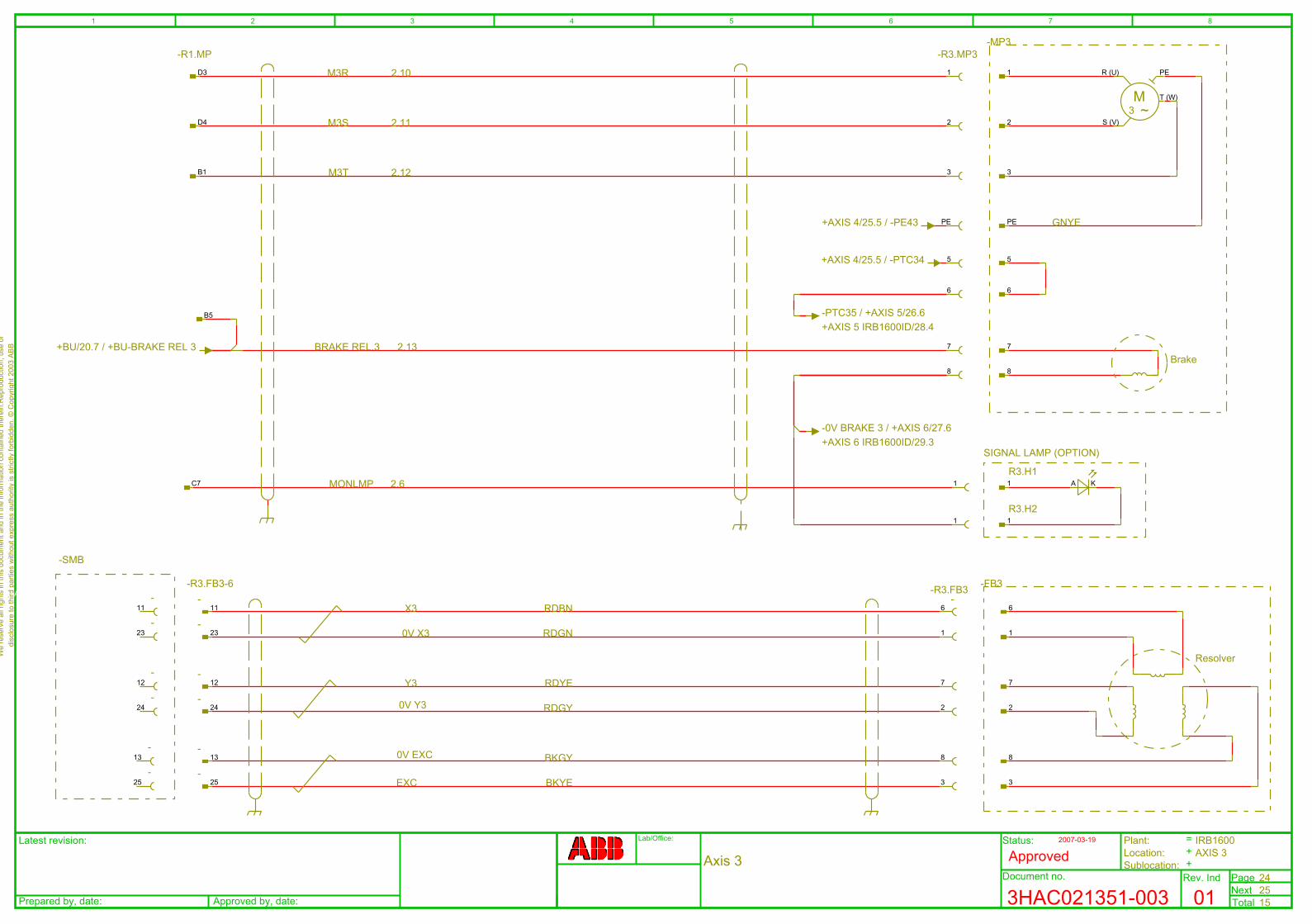
Axis 3 Location:Plant: =
++Sublocation:
IRB1600AXIS 3
Document no.Next
Rev. Ind
01
Lab/Office: Status:Approved
2007-03-19
1 2 3 4 5 6 7 8
-SMB
+AXIS 1/22.1
-25
D4
B1
B5
-23
2.11
M3R
M3S
M3T
RDBN
RDGN
RDYE
RDGY
BKGY
BKYE
BRAKE REL.3
2.10
2.12
2.13
2.6
X3
0V X3
Y3
0V Y3
0V EXC
EXC
-6
1
7
2
8
3
1
2
3
PE
7
8
1
2
3
PE
7
8
6
1
7
2
8
3
GNYE
M3 ~
S (V)
T (W)
R (U) PE
Brake
Resolver
5
6
5
6
-MP3
-FB3
-R1.MP -R3.MP3D3
-11
1
1
SIGNAL LAMP (OPTION)
1
1
R3.H1
R3.H2
A KC7 MONLMP
+BU/20.7 / +BU-BRAKE REL 3
+AXIS 4/25.5 / -PTC34
-12
-13
-24
-25
-13
-24
-12
-23
-11
+AXIS 4/25.5 / -PE43
-R3.FB3-R3.FB3-6
-0V BRAKE 3 / +AXIS 6/27.6+AXIS 6 IRB1600ID/29.3
-PTC35 / +AXIS 5/26.6+AXIS 5 IRB1600ID/28.4

Prepared by, date:26
We
rese
rve
all r
ight
s in
this
doc
umen
t and
in th
e in
form
atio
n co
ntai
ned
ther
ein.
Rep
rodu
ctio
n, u
se o
r di
sclo
sure
to th
ird p
artie
s w
ithou
t exp
ress
aut
horit
y is
stri
ctly
forb
idde
n. ©
Cop
yrig
ht 2
003
ABB
Page 25
15Total3HAC021351-003
Latest revision:
Approved by, date:
Axis 4 Location:Plant: =
++Sublocation:
IRB1600AXIS 4
Document no.Next
Rev. Ind
01
Lab/Office: Status:Approved
2007-03-19
1 2 3 4 5 6 7 8
-SMB
+AXIS 1/22.1
-PE
A9
A8
2.15
M4R
M4S
M4T
RDBU
RD
BKBN
BKGN
BU
BUPK
BRAKE REL.4
2.14
2.16
2.17
X4
0V X4
Y4
0V Y4
0V EXC
EXC
-6
1
7
2
8
3
1
2
3
9
7
8
1
2
3
9
7
6
1
7
2
8
3
PE
M3 ~
S (V)
T (W)
R (U) PE
Brake
Resolver
5
6
5
6
2.9
-R3.MP4
-R3.FB4
-R1.MP-MU4
-FB4
A10
8
+BU/20.7 / +BU-BRAKE REL 4
-PTC34 / +AXIS 3/24.6B6
-7
-19
-2
-14
-3
-15
-2
-14
-3
-15
-7
-19
-PE43 / +AXIS 3/24.6
-0V BRAKE4 / +AXIS 5/26.6+AXIS 5 IRB1600ID/28.3
-R2.FB3-6
-EXC45 / +AXIS 5/26.6+AXIS 5 IRB1600ID/28.3
-0V EXC45 / +AXIS 5/26.6+AXIS 5 IRB1600ID/28.3
+AXIS 6/27.5+AXIS 6 IRB1600ID/29.4 / -PTC46

Prepared by, date:27
We
rese
rve
all r
ight
s in
this
doc
umen
t and
in th
e in
form
atio
n co
ntai
ned
ther
ein.
Rep
rodu
ctio
n, u
se o
r di
sclo
sure
to th
ird p
artie
s w
ithou
t exp
ress
aut
horit
y is
stri
ctly
forb
idde
n. ©
Cop
yrig
ht 2
003
ABB
Page 26
15Total3HAC021351-003
Latest revision:
Approved by, date:
Axis 5 Location:Plant: =
++Sublocation:
IRB1600AXIS 5
Document no.Next
Rev. Ind
01
Lab/Office: Status:Approved
2007-03-19
1 2 3 4 5 6 7 8
D10
D9
A7
B9
C5
-R1.MP
2.19
M5R
M5S
M5T
0V PTC
0V BRAKE 5
BRAKE REL.5
2.18
2.20
2.23
2.22
2.21
-R3.MP5
-R3.FB5
1
2
3
9
5
6
7
8
-6
1
7
2
8
3
-MU5
+AXIS 5 IRB1600ID/28.7
-FB5
+AXIS 5 IRB1600ID/28.7
1
2
3
9
7
8
6
1
7
2
8
3
5
6
GNYE
M3 ~
S (V)
T (W)
R (U) PE
Brake
Resolver
-SMB
+AXIS 1/22.1 -4
-16
-5
-17
-16
-5
-17
-4 X5
Y5
0V X5
0V Y5
BKPK
BKBU
BKRD
BK
+AXIS 6/27.6 / -PE65
+BU/20.7 / +BU-BRAKE REL 5
+BU/20.7 / +BU-0V BRAKE 5
+AXIS 4/25.5 / +AXIS 4-0V BRAKE4
-R2.FB3-6
+AXIS 4/25.6 / +AXIS 4-EXC45
+AXIS 4/25.6 / +AXIS 4-0V EXC45
-0V EXC56 / +AXIS 6/27.6
-EXC56 / +AXIS 6/27.6
+AXIS 3/24.5 / +AXIS 3-PTC35
Prepared by, date:28
We
rese
rve
all r
ight
s in
this
doc
umen
t and
in th
e in
form
atio
n co
ntai
ned
ther
ein.
Rep
rodu
ctio
n, u
se o
r di
sclo
sure
to th
ird p
artie
s w
ithou
t exp
ress
aut
horit
y is
stri
ctly
forb
idde
n. ©
Cop
yrig
ht 2
003
ABB
Page 27
15Total3HAC021351-003
Latest revision:
Approved by, date:
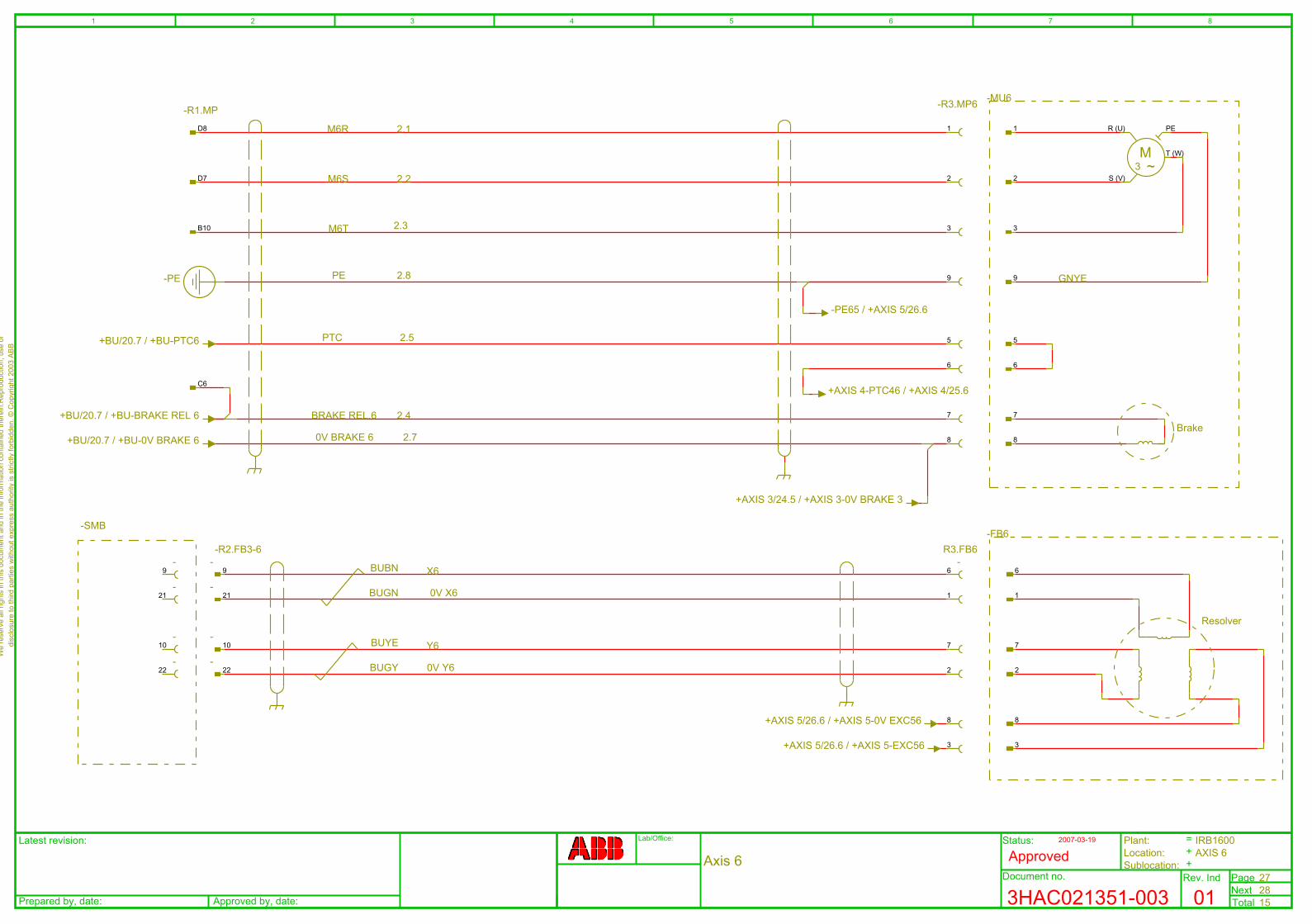
Axis 6 Location:Plant: =
++Sublocation:
IRB1600AXIS 6
Document no.Next
Rev. Ind
01
Lab/Office: Status:Approved
2007-03-19
1 2 3 4 5 6 7 8
-PE
D8
D7
B10
C6
-R1.MP
2.2
M6R
M6S
M6T
BRAKE REL.6
2.1
2.8
2.4
-R3.MP6
R3.FB6
1
2
3
9
5
6
7
8
-6
1
7
2
8
3
-MU6
+AXIS 6 IRB1600ID/29.7
-FB6
+AXIS 6 IRB1600ID/29.7
1
2
3
9
5
6
7
8
6
1
7
2
8
3
GNYE
M3 ~
S (V)
T (W)
R (U) PE
Brake
Resolver
-SMB
+AXIS 1/22.1 -9
-21
-10
-22
-9
-21
-10
-22
-R2.FB3-6
BUBN
BUGN
BUYE
BUGY
X6
Y6
0V Y6
0V X6
-PE65 / +AXIS 5/26.6
2.3
PE
2.5
2.7
PTC
0V BRAKE 6
+BU/20.7 / +BU-BRAKE REL 6
+BU/20.7 / +BU-0V BRAKE 6
+AXIS 3/24.5 / +AXIS 3-0V BRAKE 3
+AXIS 5/26.6 / +AXIS 5-0V EXC56
+AXIS 5/26.6 / +AXIS 5-EXC56
+BU/20.7 / +BU-PTC6
+AXIS 4-PTC46 / +AXIS 4/25.6

Prepared by, date:29
We
rese
rve
all r
ight
s in
this
doc
umen
t and
in th
e in
form
atio
n co
ntai
ned
ther
ein.
Rep
rodu
ctio
n, u
se o
r di
sclo
sure
to th
ird p
artie
s w
ithou
t exp
ress
aut
horit
y is
stri
ctly
forb
idde
n. ©
Cop
yrig
ht 2
003
ABB
Page 28
15Total3HAC021351-003
Latest revision:
Approved by, date:
Axis 5 IRB1600ID Location:Plant: =
++Sublocation:
IRB1600AXIS 5 IRB1600ID
Document no.Next
Rev. Ind
01
Lab/Office: Status:Approved
2007-03-19
1 2 3 4 5 6 7 8
-SMB
+AXIS 1/22.1
D10
D9
B9
2.19
M5R
M5S
M5T
0V PTC
0V BRAKE.2
BRAKE REL.5
2.18
2.20
2.22
2.21
2.23
X5
0V X5
Y5
0V Y5
2
3
9
5
6
7
8
6
1
7
2
8
3
1
2
3
9
5
6
7
8
6
1
7
2
8
3
-R3.FB5
M5R
M5S
M5T
PE
BRAKE REL.5
0V BRAKE.5
WH
WH
WH
GN
YE
OG
X5
0V X5
Y5
0V Y5
0V EXC
EXC
24
-6
1
7
2
8
3
1
2
3
9
7
8
1
2
3
9
7
8
6
1
7
2
8
3
GNYE
M3 ~
S (V)
T (W)
R (U) PE
Brake
Resolver
5
6
5
6
-R1.MP -R4.MP5
-R4.FB5
A7 1
-R3.MP5-MU5
+AXIS 5/26.7
-FB5
+AXIS 5/26.7
C5
-4
-16
-5
-17
-4
-16
-5
-17
+AXIS 6 IRB1600ID/29.4 / -PE65
BK
BKPK
BKBU
BKRD
+BU/20.7 / +BU-BRAKE REL 5
+BU/20.7 / +BU-0V BRAKE 5
+AXIS 4/25.5 / +AXIS 4-0V BRAKE4
-R2.FB3-6
17
18
19
20
21
22
23
+AXIS 4/25.6 / +AXIS 4-EXC45
-EXC56 / +AXIS 6 IRB1600ID/29.4
+AXIS 4/25.6 / +AXIS 4-0V EXC45
-0V EXC56 / +AXIS 6 IRB1600ID/29.4
+AXIS 3/24.5 / +AXIS 3-PTC35 PTC
PTC
Prepared by, date:30
We
rese
rve
all r
ight
s in
this
doc
umen
t and
in th
e in
form
atio
n co
ntai
ned
ther
ein.
Rep
rodu
ctio
n, u
se o
r di
sclo
sure
to th
ird p
artie
s w
ithou
t exp
ress
aut
horit
y is
stri
ctly
forb
idde
n. ©
Cop
yrig
ht 2
003
ABB
Page 29
15Total3HAC021351-003
Latest revision:
Approved by, date:
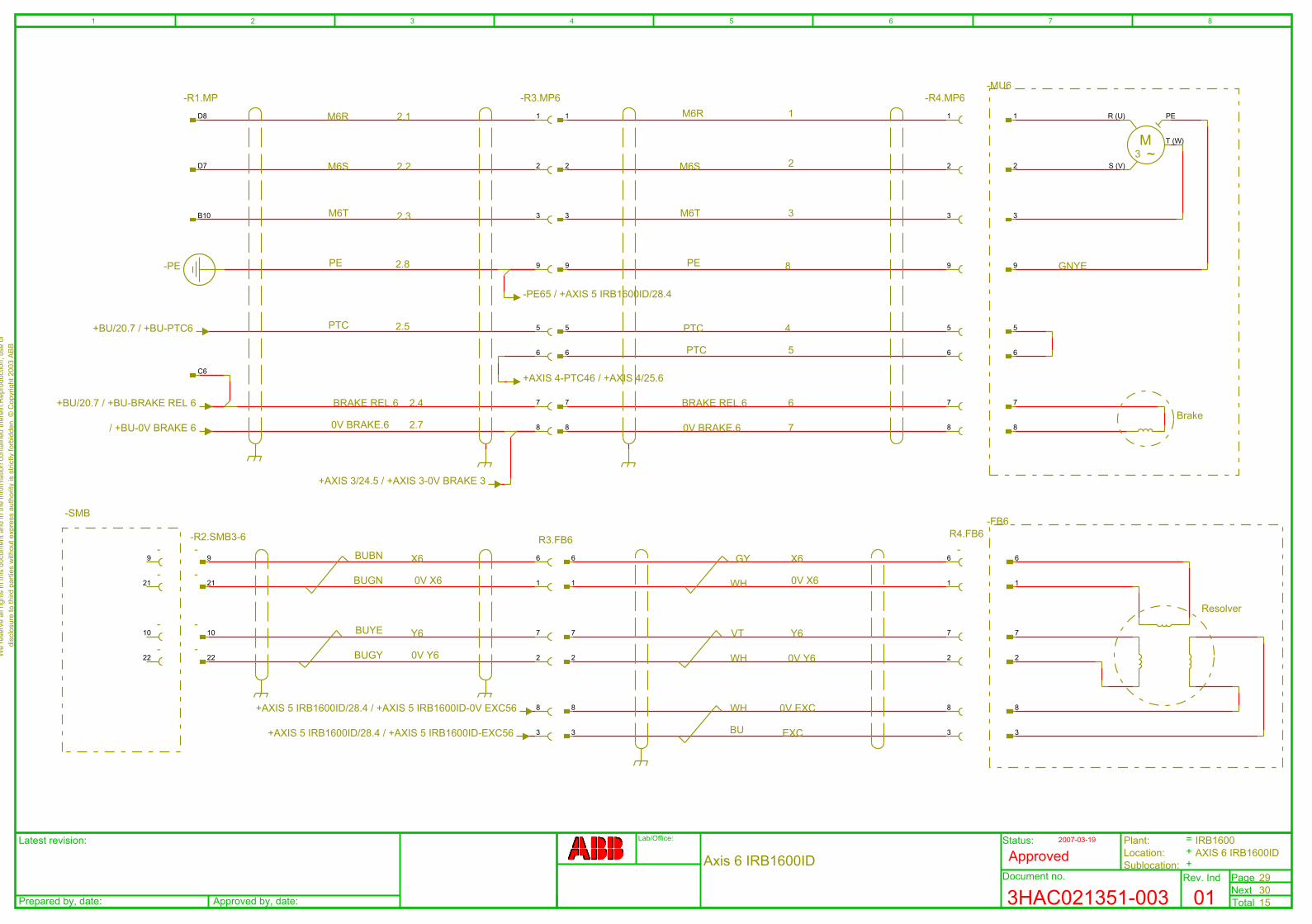
Axis 6 IRB1600ID Location:Plant: =
++Sublocation:
IRB1600AXIS 6 IRB1600ID
Document no.Next
Rev. Ind
01
Lab/Office: Status:Approved
2007-03-19
1 2 3 4 5 6 7 8
-SMB
+AXIS 1/22.1 -9
-21
-10
-22
-PE
D7
B10
C6
-21
-10
-22
2.2
M6R
M6S
M6T
BUBN
BUGN
BUYE
BUGY
BRAKE REL.6
2.1
2.3
2.4
X6
0V X6
Y6
0V Y6
2
3
9
5
6
7
8
6
1
7
2
8
3
1
2
3
9
5
6
7
8
6
1
7
2
8
3
R3.FB6
M6R
M6S
M6T
PE
BRAKE REL.6
0V BRAKE.6
WH
WH
WH
GY
VT
BU
X6
0V X6
Y6
0V Y6
0V EXC
EXC
8
-6
1
7
2
8
3
1
2
3
9
7
8
1
2
3
9
7
8
6
1
7
2
8
3
GNYE
M3 ~
S (V)
T (W)
R (U) PE
Brake
Resolver
5
6
5
6
-R1.MP
-R2.SMB3-6
-MU6
+AXIS 6/27.7
-FB6
+AXIS 6/27.7
1D8
-9
-R3.MP6 -R4.MP6
R4.FB6
PE
2.5PTC
2.8
2.70V BRAKE.6
-PE65 / +AXIS 5 IRB1600ID/28.4
PTC
PTC
+BU/20.7 / +BU-BRAKE REL 6
/ +BU-0V BRAKE 6
+AXIS 3/24.5 / +AXIS 3-0V BRAKE 3
1
2
3
4
5
6
7
+AXIS 5 IRB1600ID/28.4 / +AXIS 5 IRB1600ID-EXC56
+AXIS 5 IRB1600ID/28.4 / +AXIS 5 IRB1600ID-0V EXC56
+BU/20.7 / +BU-PTC6
+AXIS 4-PTC46 / +AXIS 4/25.6
Prepared by, date:31
We
rese
rve
all r
ight
s in
this
doc
umen
t and
in th
e in
form
atio
n co
ntai
ned
ther
ein.
Rep
rodu
ctio
n, u
se o
r di
sclo
sure
to th
ird p
artie
s w
ithou
t exp
ress
aut
horit
y is
stri
ctly
forb
idde
n. ©
Cop
yrig
ht 2
003
ABB
Page 30
15Total3HAC021351-003
Latest revision:
Approved by, date:
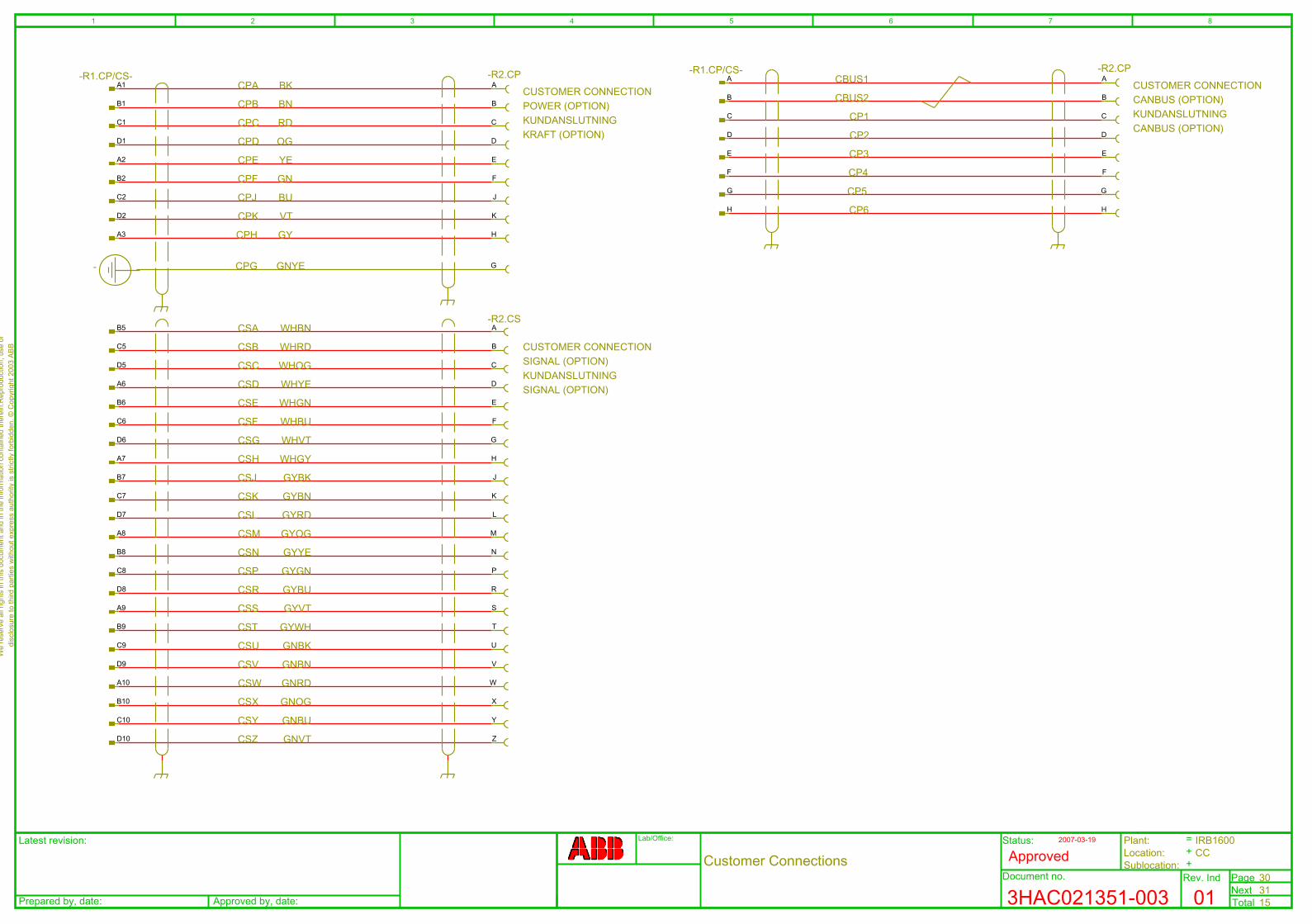
Customer Connections Location:Plant: =
++Sublocation:
IRB1600CC
Document no.Next
Rev. Ind
01
Lab/Office: Status:Approved
2007-03-19
1 2 3 4 5 6 7 8
-
-R2.CPA
B
C
D
E
F
J
K
H
-R1.CP/CS-A1
B1
C1
D1
A2
B2
C2
D2
A3
B5
C5
D5
A6
B6
C6
D6
A7
B7
C7
D7
A8
B8
C8
D8
A9
B9
C9
D9
A10
B10
C10
D10
-R2.CSA
B
C
D
E
F
G
H
J
K
L
M
N
P
R
S
T
U
V
W
X
Y
Z
CPA
CPB
CPC
CPD
CPE
CPF
CPJ
CPK
CPH
CSA
CSB
CSC
CSD
CSE
CSF
CSG
CSH
CSJ
CSK
CSL
CSM
CSN
CSP
CSR
CSS
CST
CSU
CSV
CSW
CSX
CSY
CSZ
G
BK
BN
RD
OG
YE
GN
BU
VT
GY
WHBN
WHRD
WHOG
WHYE
WHGN
WHBU
WHVT
WHGY
GYBK
GYBN
GYRD
GYOG
GYYE
GYGN
GYBU
GYVT
GYWH
GNBK
GNBN
GNRD
GNOG
GNBU
GNVT
CPG GNYE
CUSTOMER CONNECTIONPOWER (OPTION)KUNDANSLUTNING KRAFT (OPTION)
CUSTOMER CONNECTIONSIGNAL (OPTION)KUNDANSLUTNING SIGNAL (OPTION)
-R1.CP/CS-A
B
C
D
E
F
G
H
CP5
CP4
CBUS1
CBUS2
CP3
CP6
CP1
CP2
-R2.CPA
B
C
D
E
F
G
H
CUSTOMER CONNECTIONCANBUS (OPTION)KUNDANSLUTNING CANBUS (OPTION)
Prepared by, date:
We
rese
rve
all r
ight
s in
this
doc
umen
t and
in th
e in
form
atio
n co
ntai
ned
ther
ein.
Rep
rodu
ctio
n, u
se o
r di
sclo
sure
to th
ird p
artie
s w
ithou
t exp
ress
aut
horit
y is
stri
ctly
forb
idde
n. ©
Cop
yrig
ht 2
003
ABB
Page 31
15Total3HAC021351-003
Latest revision:
Approved by, date:
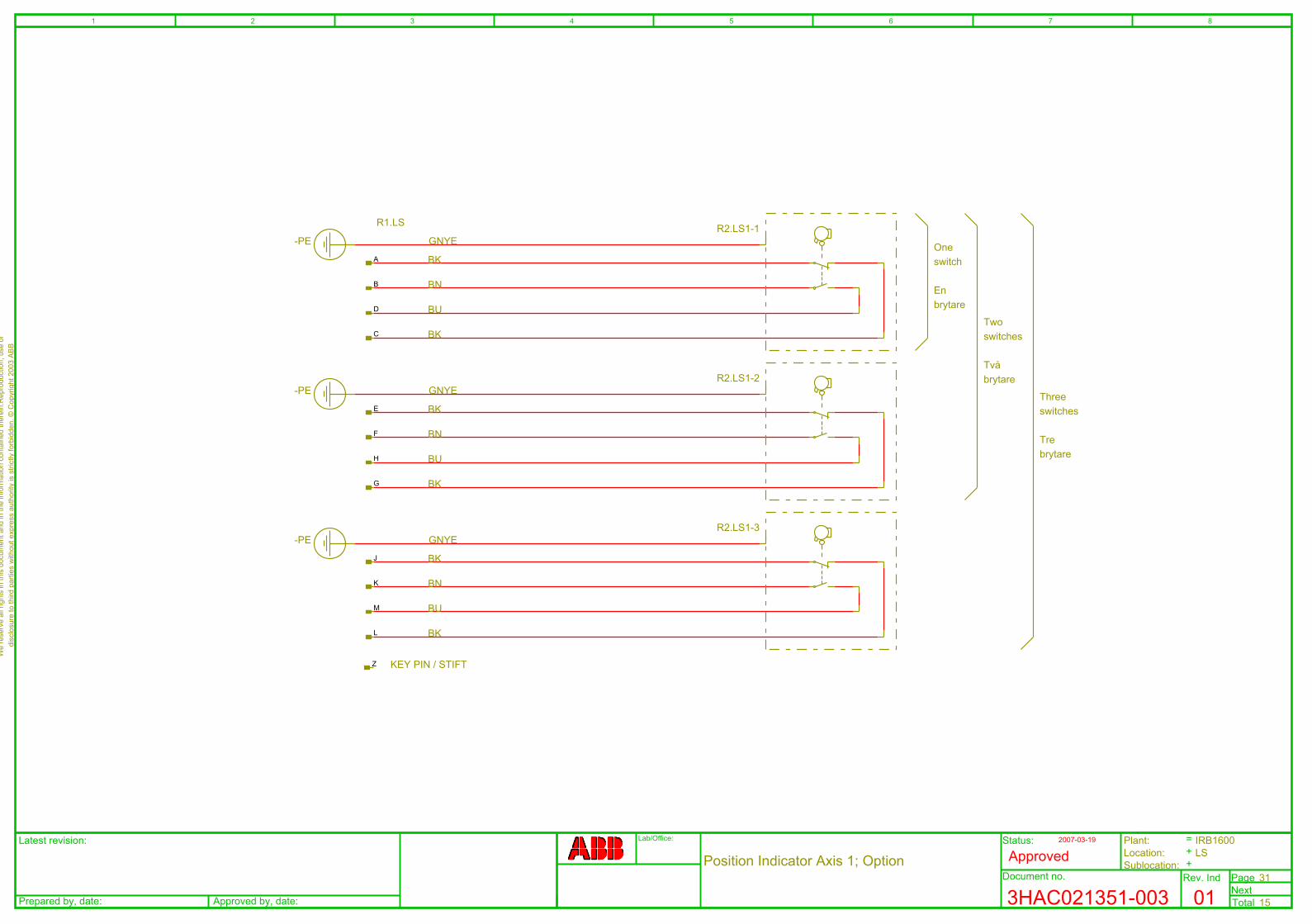
Position Indicator Axis 1; Option Location:Plant: =
++Sublocation:
IRB1600LS
Document no.Next
Rev. Ind
01
Lab/Office: Status:Approved
2007-03-19
1 2 3 4 5 6 7 8
A
B
D
C
E
F
H
G
J
K
M
L
BK
BN
BU
BK
R2.LS1-1
BK
BN
BU
BK
BK
BN
BU
BK
R2.LS1-2
R2.LS1-3
Oneswitch
En brytare
Twoswitches
Tvåbrytare
Threeswitches
Trebrytare
-PE
-PE
-PE
Z KEY PIN / STIFT
GNYE
GNYE
GNYE
R1.LS