© abb oy - 1 - lv ac drives expert days 2008 pid control & acs550 and ach550
TRANSCRIPT
© A
BB
Oy
- 1
-
LV AC drives expert days 2008
PID Control& ACS550 and ACH550

© A
BB
Oy
- 2
-27
-Aug
-07
PID in every day life
Cruise function in a car: User sets the speed (Input = SetPoint = Reference)
Car measures (Feedback = Actual)
Car automatically minimizes the error (Deviation) between these two (Input and Feedback)
”…as a result is a smooth ride.”

© A
BB
Oy
- 3
-27
-Aug
-07
PID: General
Widely used in automation and process industries.
Applications: Motor Speed Control
Pressure & Temperature Control
Flow Control
(Water) Level Control

© A
BB
Oy
- 4
-27
-Aug
-07
PID: General
Proportional-integral-derivative (PID) controller.
Control loop feedback method:
VSD (controller) compares the reference signal (input) to the actual signal (feedback) and controls the speed of the drive according to the difference (error) of these signals.
© A
BB
Oy
- 5
-27
-Aug
-07
PID: General
PID algorithm includes three different variables: P(roportional): Proportional reaction to the error of the reference and measured
signals: improves the rise time!
I(ntegral): Determines the accumumulated proportional offset over time: eliminates the steady state error!
D(erivative): Anticipated control: determines the slope of the error signal.
Reduces the overshoot of the integral component.

© A
BB
Oy
- 6
-27
-Aug
-07
PID: General
The output (v) of the PID controller:
dt
deKedtKeKv DIP
P I D
© A
BB
Oy
- 7
-27
-Aug
-07
PID: General
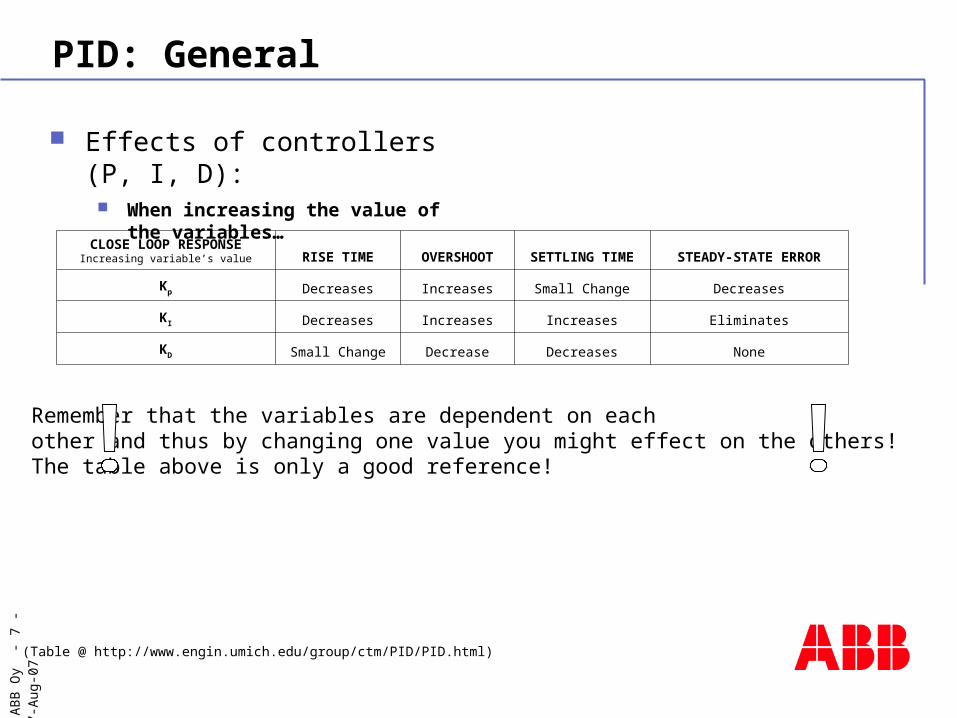
Effects of controllers (P, I, D): When increasing the value of the
variables…
CLOSE LOOP RESPONSEIncreasing variable’s value RISE TIME OVERSHOOT SETTLING TIME STEADY-STATE ERROR
Kp Decreases Increases Small Change Decreases
KI Decreases Increases Increases Eliminates
KD Small Change Decrease Decreases None
Remember that the variables are dependent on each other and thus by changing one value you might effect on the others!The table above is only a good reference!
(Table @ http://www.engin.umich.edu/group/ctm/PID/PID.html)
© A
BB
Oy
- 8
-27
-Aug
-07
PID: Tuning
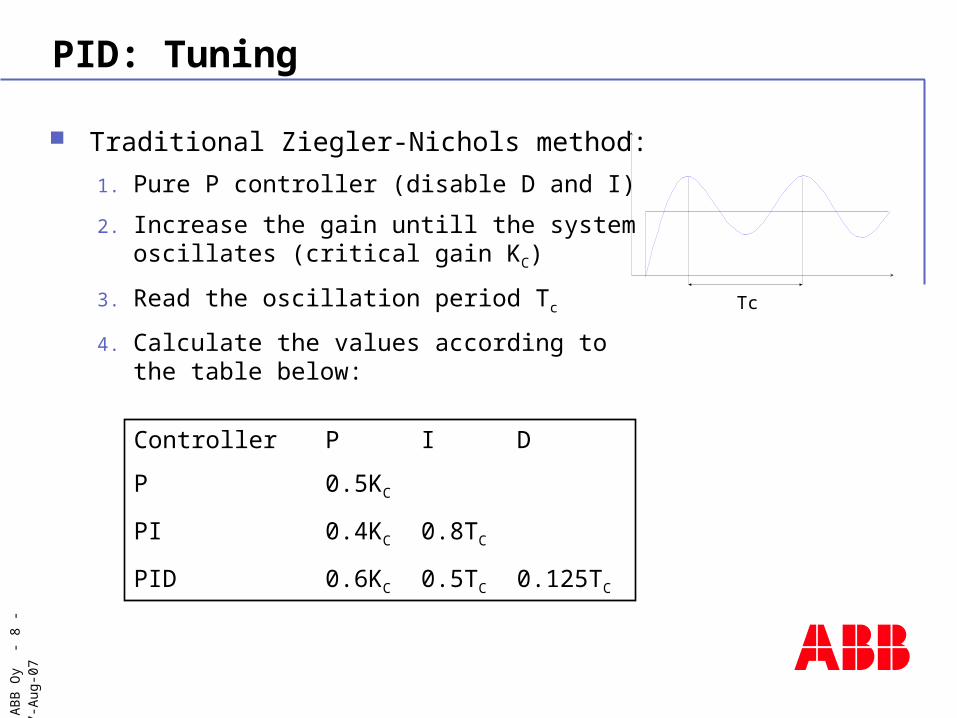
Traditional Ziegler-Nichols method:
1. Pure P controller (disable D and I)
2. Increase the gain untill the system oscillates (critical gain KC)
3. Read the oscillation period Tc
4. Calculate the values according to the table below:
Tc
Controller P I D
P 0.5KC
PI 0.4KC 0.8TC
PID 0.6KC 0.5TC 0.125TC

© A
BB
Oy
- 9
-27
-Aug
-07
PID: General
Control type by application:
Level Control: Usually P
Flow & Pressure & Temperature Control: PI
Motor Speed Control: PID
(Figures @ http://www.engin.umich.edu/group/ctm/PID/PID.html)

© A
BB
Oy
- 1
0 -
27-A
ug-0
7
PID: General
Using PID can be served: Fast response/rise time
No overshoot
Low steady-state error
SMOOTH AND FAST SYSTEM!!!
© A
BB
Oy
- 1
1 -
27-A
ug-0
7
PID: General
Sometimes all three controllers are not needed to obtain a good response! Depending on the system a good enough control can be
achieved by using only PI controller!
Always keep the system as simple as possible!

© A
BB
Oy
- 1
2 -
27-A
ug-0
7
PID: ACS550
PID functions available both on ACS550 and ACH550
ACS550: PID control Groups:
40 (Process PID SET 1)
41 (Process PID SET 2) and
42 (EXT / TRIM PID)
Pre-defined PID control macro: Set 9902
PID Assistant

© A
BB
Oy
- 1
3 -
27-A
ug-0
7
PID: ACS550
PID control macro: (9902)

© A
BB
Oy
- 1
4 -
27-A
ug-0
7
PID: ACH550
ACH550: PID controller is in every HVAC macro. Groups:
40 (Process PID SET 1)
41 (Process PID SET 2) and
42 (EXT / TRIM PID)
Macro selections: Set 9902
PID Assistant

© A
BB
Oy
- 1
5 -
27-A
ug-0
7
PID: ACS550 and ACH550
ACS550 and ACH550 schematic of reference signal using parameter group 40:
In order to use PID controller, parameter 1106 must set to EXT2 (19).

© A
BB
Oy
- 1
6 -
27-A
ug-0
7
PID: ACS550 and ACH550
Parameters 4001-4009: Used to adjust the PID:
Param. 4001: GAIN
Param. 4002: INTEGRATION TIME
Param. 4003: DERIVATION TIME
…

© A
BB
Oy
- 1
7 -
27-A
ug-0
7
PID: ACS550 and ACH550
Rule of thumb in parameter setting:
PID GAIN (parameter 4001)
increase until the system starts to oscillate
right value is half of this
PID INTEG TIME (parameter 4002)
decrease until the system starts to oscillate
right value is 2*Ti
© A
BB
Oy
- 1
8 -
27-A
ug-0
7
PID: Summary
What is it for the customer?!
1. Accurate: Quality of the Process and Goods
2. Easiness: (PID Macro) Time Savings
3. Extent in Use: Compatibility
Maintenance & Support
