© 2003-2009 ran ginosar048878 lecture 4: speed-independent control circuits 1 vlsi architectures...
Post on 20-Dec-2015
214 views
TRANSCRIPT

© 2003-2009 Ran Ginosar 048878 Lecture 4: Speed-Independent Control Circuits 1
VLSI Architectures048878
Lecture 4
S&F Ch. 6: Speed-Independent Control Circuits

© 2003-2009 Ran Ginosar 048878 Lecture 4: Speed-Independent Control Circuits 2
Control Circuits• Many methods, tools, assumptions,
frameworks
• Some tools generate both control and data-path
• We now consider one method / tool for control-only spec, verification and synthesis:
– Assumption: Speed independent control for speed independent bundled data
– Method: Signal Transition Graph • A special type of Petri net
– Tool: Petrify (mostly from Jordi Cortadella at UPC)

© 2003-2009 Ran Ginosar 048878 Lecture 4: Speed-Independent Control Circuits 4
Delay Models• Fixed delay: d=c
• Min-max delay: choose d[m,M]
– Max delay: d[0,M]
– Low-bounded delay: d[m,)
• Unbounded delay: d[0,)
• Inertial delay: Glitches are filtered.
– We don’t assume inertial delays in async control design

© 2003-2009 Ran Ginosar 048878 Lecture 4: Speed-Independent Control Circuits 5
Petri net, Signal Transition Graph (STG)
a+ b+
c+
a- b-
c-
a+ b+
c+
a- b-
c-

© 2003-2009 Ran Ginosar 048878 Lecture 4: Speed-Independent Control Circuits 6
Separating Inputs, Outputs and Internals
a+ b+
c+
a- b-
c-
a+ b+
c+
a- b-
c-
INPUTS, OUTPUTSINPUTS, OUTPUTS
© 2003-2009 Ran Ginosar 048878 Lecture 4: Speed-Independent Control Circuits 7
In the STG:• PN transition are signal transitions
• PN places and arcs are causal relations
• Simple places (one arc in, one arc out) are omitted
• MARKING
assignment of tokens to places
state of the circuit
© 2003-2009 Ran Ginosar 048878 Lecture 4: Speed-Independent Control Circuits 8
Token Preservation (from Lecture #1)
• Tokens do not disappear
• Tokens do not appear (from nowhere)
• One token does not overtake another
• A transition with n inputs and m outputs:
– waits for n tokens on inputs
– Generates m tokens on outputs
n m

© 2003-2009 Ran Ginosar 048878 Lecture 4: Speed-Independent Control Circuits 9
State Graph (SG)
abc 000State:
100 010
110
011 101
111
001
•SG more complex than STG
•What complexity?
•Bad for design spec
•Needed for synthesis
a+ b+
b+ a+
c+
a- b-
b- a-
c-
© 2003-2009 Ran Ginosar 048878 Lecture 4: Speed-Independent Control Circuits 10
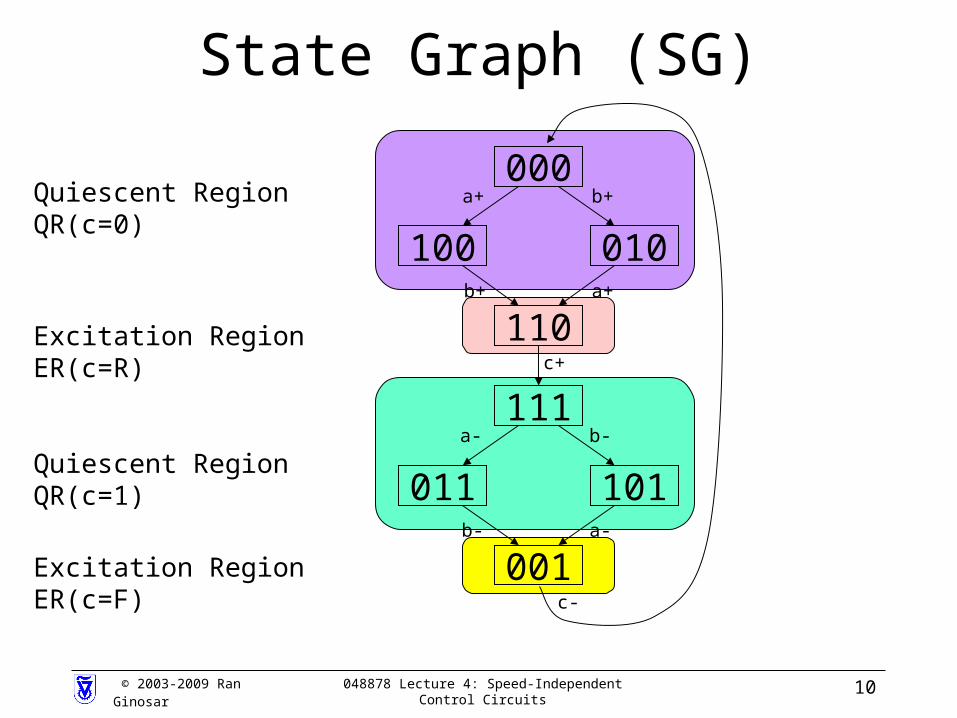
State Graph (SG)
Quiescent Region QR(c=0)
Quiescent Region QR(c=1)
Excitation Region ER(c=R)
Excitation Region ER(c=F)
000
100 010
110
011 101
111
001
a+ b+
b+ a+
c+
a- b-
b- a-
c-

© 2003-2009 Ran Ginosar 048878 Lecture 4: Speed-Independent Control Circuits 11
State Graph (SG)
Quiescent Region QR(c=0)
Quiescent Region QR(c=1)
Excitation Region ER(c=R)
Excitation Region ER(c=F)
000
100 010
110
011 101
111
001
a+ b+
b+ a+
c+
a- b-
b- a-
c-
SET C
RESET C
KEEP C=1
KEEP C=0
© 2003-2009 Ran Ginosar 048878 Lecture 4: Speed-Independent Control Circuits 12
Synthesis: C Element• Two methods:
– Using gates
– Using SR latch

© 2003-2009 Ran Ginosar 048878 Lecture 4: Speed-Independent Control Circuits 13
Synthesis: C Element using gates
000
100 010
110
011 101
111
001
a+ b+
b+ a+
c+
a- b-
b- a-
c-
SET C
KEEP C=1
0 0 R 0
F 1 1 1
0
1
00 01 11 10c\ab
c=ab+ac+bc
a
bc
!HazardousMaterial !
© 2003-2009 Ran Ginosar 048878 Lecture 4: Speed-Independent Control Circuits 14
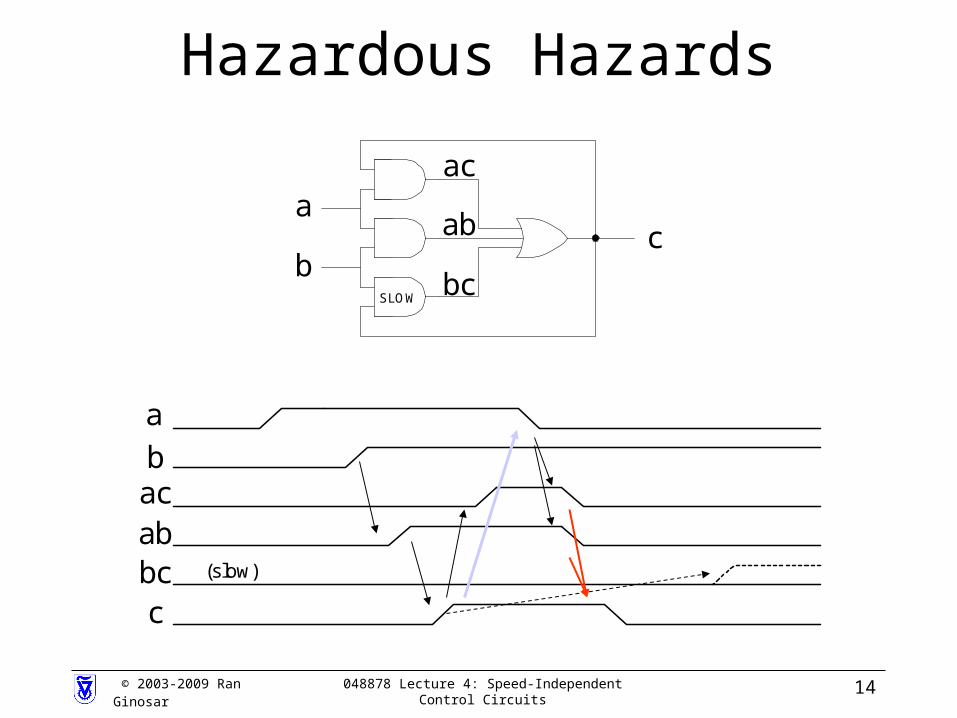
Hazardous Hazards
SLOW
a
bc
ac
ab
bc
a
b
c
acabbc (slow)

© 2003-2009 Ran Ginosar 048878 Lecture 4: Speed-Independent Control Circuits 15
Hazardous Hazards• Hazards are no big deal in sync circuits
• Hazards may be deadly in (some) async circuits
• Now you know why you were taught about them in school…
• We can build hazard-free circuits
• We can (sometimes) make timing assumptions and add delays

© 2003-2009 Ran Ginosar 048878 Lecture 4: Speed-Independent Control Circuits 16
Hiding Hazards Behind Delays
SLOW
a
bd
ac
ab
bc
c
a
b
c
acabbc (slow rise)
d
Do you like slowing your circuit ?

© 2003-2009 Ran Ginosar 048878 Lecture 4: Speed-Independent Control Circuits 17
Avoiding Hazards with Complex Gates
ab c
c
a
b
a b
a
b
a b
c
cT1
•Theoretically, same hazard problem (e.g. T1 slow)
•Must use caution or delay output
© 2003-2009 Ran Ginosar 048878 Lecture 4: Speed-Independent Control Circuits 18
RESET C
KEEP C=0
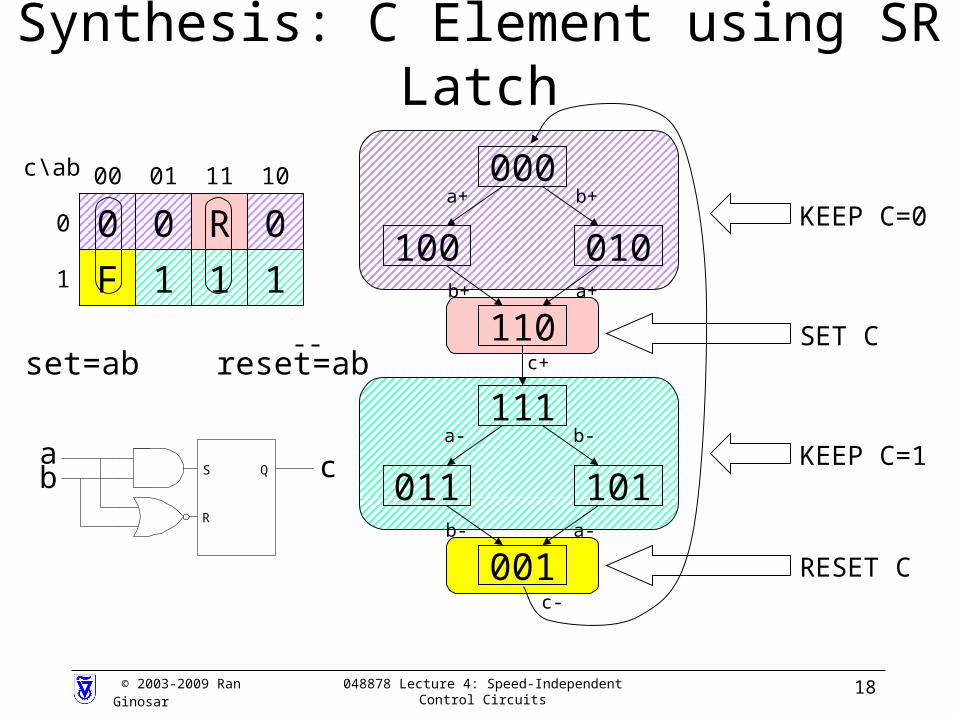
Synthesis: C Element using SR Latch
000
100 010
110
011 101
111
001
a+ b+
b+ a+
c+
a- b-
b- a-
c-
SET C
KEEP C=1
0 0 R 0
F 1 1 1
0
1
00 01 11 10c\ab
set=ab reset=ab
ab cS
R
Q

© 2003-2009 Ran Ginosar 048878 Lecture 4: Speed-Independent Control Circuits 19
Synthesis using SR latches• Needs (mutually exclusive) SET, RESET
regions
• May use KEEP 0, KEEP 1 regions
• May use unreachable states (more later…)
• Area / performance / power may be more or less than gate circuits
• May use C elements instead of SR latches
• SR latches enable implementation with standard libraries

© 2003-2009 Ran Ginosar 048878 Lecture 4: Speed-Independent Control Circuits 20
Implementation using Latches / Cel
S
R
Q
SETLOGIC
RESETLOGIC
C
SETLOGIC
RESETLOGIC
© 2003-2009 Ran Ginosar 048878 Lecture 4: Speed-Independent Control Circuits 21
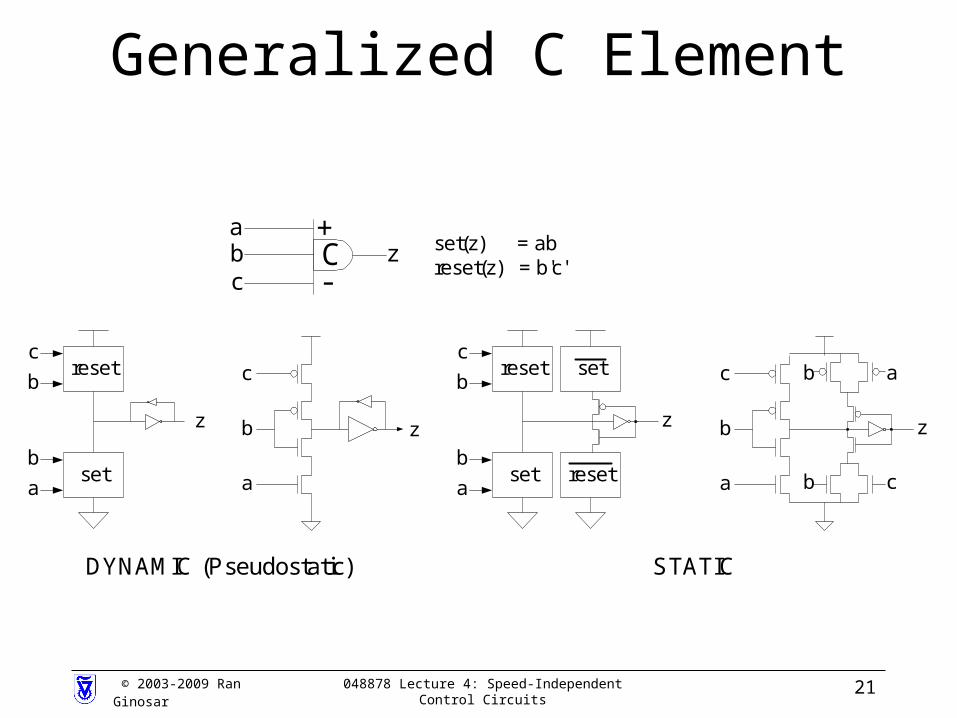
Generalized C Element
ab C
+
-cz set(z) = ab
reset(z) = b'c'
z
reset
setb
a
c
b
z
a
b
c
z
reset
setb
a
c
b
a
b
cset
reset
DYNAMIC (Pseudostatic) STATIC
z
b c
b a

© 2003-2009 Ran Ginosar 048878 Lecture 4: Speed-Independent Control Circuits 22
More interesting PNs and STGs
FORKs
JOINs
(input) CHOICE
MERGE
CONTROLLEDCHOICE
MUTUALLYEXCLUSIVE
MUTUALLYEXCLUSIVE
x+
x+
x+
x+

© 2003-2009 Ran Ginosar 048878 Lecture 4: Speed-Independent Control Circuits 23
STG with Input Choice
x+y+
z+ b+
y- x-
z- b-

© 2003-2009 Ran Ginosar 048878 Lecture 4: Speed-Independent Control Circuits 24
(S&F Fig. 6.8)

© 2003-2009 Ran Ginosar 048878 Lecture 4: Speed-Independent Control Circuits 25
(S&F Fig. 6.8)
dummy
2-Way Edge
Req=1 Ctl stableand controls dummy1/2

© 2003-2009 Ran Ginosar 048878 Lecture 4: Speed-Independent Control Circuits 26
A “Simple” Choice Net
a
b
c
d
a
bcd
d+
a-
a+b+ c-
c+ b- b+
c+
d-
RR00b+
01R0c+
0F10
a+
b+
1R00
110R
c-
0F10b-
d+
11R1a-
F110
111Fd- c+
I II

© 2003-2009 Ran Ginosar 048878 Lecture 4: Speed-Independent Control Circuits 27
Unreachable States
00
01
00 01 11 10cd\ab
x x x
x x x
x
11
10
RR00b+
01R0c+
0F10
a+
b+
1R00
110R
c-
0F10b-
d+
11R1a-
F110
111Fd- c+
0000b+
0100c+
0110
a+
b+
1000
1100
c-
0110b-
d+
1101a-
1110
1111d- c+

© 2003-2009 Ran Ginosar 048878 Lecture 4: Speed-Independent Control Circuits 28
Regions and Maps
For c
00
01
00 01 11 10cd\ab
0 R 0 0
x x R x
x x 1 x
F 1 1 x
11
10
c=d+a’b+bc
set(c)=d+a’b
reset(c)=b’
RR00b+
01R0c+
0F10
a+
b+
1R00
110R
c-
00F0b-
d+
11R1a-
F110
111Fd- c+

© 2003-2009 Ran Ginosar 048878 Lecture 4: Speed-Independent Control Circuits 29
c=d+a’b+bc
set(c)=d+a’b
reset(c)=b’
ab cd
C cab
d

© 2003-2009 Ran Ginosar 048878 Lecture 4: Speed-Independent Control Circuits 30
Regions and Maps
For d
00
01
00 01 11 10cd\ab
0 0 R 0
x x 1 x
x x F x
0 0 0 x
11
10
d=abc’
set(d)=abc’
reset(d)=c
RR00b+
01R0c+
0F10
a+
b+
1R00
110R
c-
0F10b-
d+
11R1a-
F110
111Fd- c+

© 2003-2009 Ran Ginosar 048878 Lecture 4: Speed-Independent Control Circuits 31
Walks on SG and KM
00
01
00 01 11 10cd\ab
x x x
x x x
x
11
10
I
II
I II
RR00b+
01R0c+
0F10
a+
b+
1R00
110R
c-
0F10b-
d+
11R1a-
F110
111Fd- c+

© 2003-2009 Ran Ginosar 048878 Lecture 4: Speed-Independent Control Circuits 32
STG Rules• Any STG:
– Input free-choice—Only mutex inputs may control the choice)
– 1-Bounded—Maximum 1 token per place
– Liveness—No deadlocks
• STG for Speed Independent circuits:
– Consistent state assignment—Signals strictly alternate between + and –
– Persistency—Excited signals fire, namely they cannot be disabled by another transition
• Synthesizable STG:
– Complete state coding—Different markings must represent different states

© 2003-2009 Ran Ginosar 048878 Lecture 4: Speed-Independent Control Circuits 33
• We use the following circuit to explain STG rules:
req
ack
REQ
ACK

© 2003-2009 Ran Ginosar 048878 Lecture 4: Speed-Independent Control Circuits 34
1-Bounded (Safety)• STG is safe if no place or arc can ever contain more than one
token
• Often caused by one-sided dependency
STG is not safe: If left cycle goes fast and right cycle lags, then arc ack+ REQ+ accumulates tokens. (REQ+ depends on both ack+ and ACK- )
Possible solution: stop left cycle by right cycle
REQ+ ACK+
REQ-ACK-
req+ ack+
req-ack-

© 2003-2009 Ran Ginosar 048878 Lecture 4: Speed-Independent Control Circuits 35
Liveness• STG is live if from every reachable marking,
every transition can eventually be fired
• The STG is not live: • Transitions reset, reset_ok cannot be repeated.
• But non-liveness is useful for initialization
reset_ok-reset- req+ ack+
req-ack-

© 2003-2009 Ran Ginosar 048878 Lecture 4: Speed-Independent Control Circuits 36
Consistent State Assignment• The following subset of STG makes no
sense:
a+ a+
a- a-

© 2003-2009 Ran Ginosar 048878 Lecture 4: Speed-Independent Control Circuits 37
Persistency• STG is persistent if for all arcs a* b*, other arcs ensure that
b* fires before opposite transition of a* (* is either + or -)
• Non-persistency may be caused by one-sided relations
STG is not persistent (in addition to being unsafe): If left cycle goes fast and right cycle lags, then ack+ ack- before REQ+ .
Danger: Logic design may be REQ+ = ack+Exception: If a* b*, assume that the environment assures persistency.Possible solution: stop left cycle by right cycle.
REQ+ ACK+
REQ-ACK-
req+ ack+
req-ack-

© 2003-2009 Ran Ginosar 048878 Lecture 4: Speed-Independent Control Circuits 38
Complete State Coding• STG has a complete state coding if no two different
markings have identical values for all signals.
REQ+ ACK+
REQ-ACK-
ack- req+
ack+req-
1000 1010req,ack,REQ,ACK:
1011
100110001100
0100
0000
00
01
00 01 11 10cd\ab
11
10
Disaster!
© 2003-2009 Ran Ginosar 048878 Lecture 4: Speed-Independent Control Circuits 39
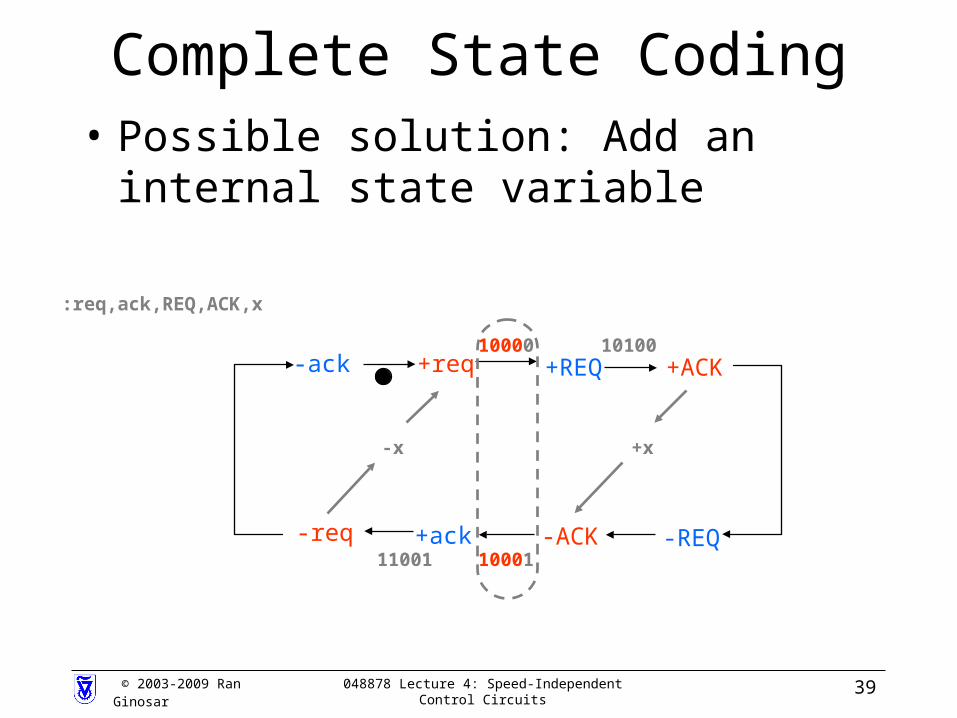
Complete State Coding• Possible solution: Add an internal state
variable
x- x+
req,ack,REQ,ACK,x:
REQ+ ACK+
REQ-ACK-
ack- req+
ack+req-
10000 10100
1000111001

© 2003-2009 Ran Ginosar 048878 Lecture 4: Speed-Independent Control Circuits 40
Original STG• We have considered the following circuit
and STG:
REQ+ ACK+
REQ-ACK-
ack- req+
ack+req-
req
ack
REQ
ACK
© 2003-2009 Ran Ginosar 048878 Lecture 4: Speed-Independent Control Circuits 41
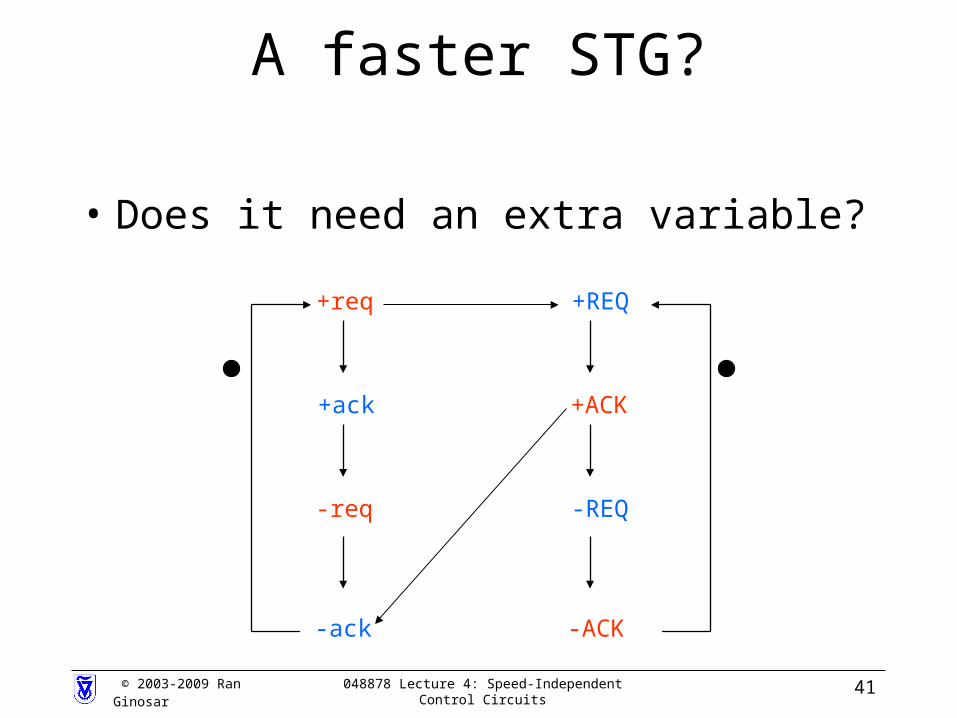
A faster STG?
• Does it need an extra variable?
ack-
req+
ack+
req-
ACK-
REQ+
ACK+
REQ-

© 2003-2009 Ran Ginosar 048878 Lecture 4: Speed-Independent Control Circuits 42
Drawn by draw_astg

© 2003-2009 Ran Ginosar 048878 Lecture 4: Speed-Independent Control Circuits 43
The SGreq,ack,REQ,ACK:
0000
r+1000a+ R+
1100 1010r-
0100
R+
1110a+ A+
1011A+
1111a+r-
0110
R+a-
a- A+
0111r-
0011a-
R-
1001R-
1101a+
R-
0101r-
0001a-R-
A-
1000A-
1100a+
A-
0100r-
a-A-1011
r+
1001r+R-
A-1111
a+
R-
1101a+
A-0111
r-
R-
0101r-
A-
a-
a-

© 2003-2009 Ran Ginosar 048878 Lecture 4: Speed-Independent Control Circuits 44
The SGreq,ack,REQ,ACK:
0000
r+1000a+ R+
1100 1010r-
0100
R+
1110a+ A+
1011A+
1111a+r-
0110
R+a-
a- A+
0111r-
0011a-
R-
1001R-
1101a+
R-
0101r-
0001a-R-
A-
1000A-
1100a+
A-
0100r-
a-A-1011
r+
1001r+R-
A-1111
a+
R-
1101a+
A-0111
r-
R-
0101r-
A-
a-
a-
R+
R+
R+

© 2003-2009 Ran Ginosar 048878 Lecture 4: Speed-Independent Control Circuits 45
Drawn by write_sg & draw_astg

© 2003-2009 Ran Ginosar 048878 Lecture 4: Speed-Independent Control Circuits 46
Extra states inserted by petrify

© 2003-2009 Ran Ginosar 048878 Lecture 4: Speed-Independent Control Circuits 47
Rearranged STG
ack-
req+
ack+
req-
c1-
c1+
c0-
ACK-
REQ+
ACK+
REQ-
c2-
c2+
c0+
Initial Internal State: c0=c1=c2=1

© 2003-2009 Ran Ginosar 048878 Lecture 4: Speed-Independent Control Circuits 48
The new State Graph…

© 2003-2009 Ran Ginosar 048878 Lecture 4: Speed-Independent Control Circuits 49
The SynthesizedComplex Gates Circuit
INORDER = r A a R csc0 csc1 csc2;
OUTORDER = [a] [R] [csc0] [csc1] [csc2];
[a] = a (csc2 + csc0) + csc1';
[R] = csc2 (csc0 (a + r) + R);
[csc0] = csc0 (csc1' + a') + R' csc2;
[csc1] = r' (csc0 + csc1);
[csc2] = A' (csc0' (csc1' + a') + csc2);

© 2003-2009 Ran Ginosar 048878 Lecture 4: Speed-Independent Control Circuits 50
Technology Mapping
INORDER = r A a R csc0 csc1 csc2;OUTORDER = [a] [R] [csc0] [csc1] [csc2];[0] = R'; # gate inv: combinational[1] = [0]' A' + csc2'; # gate oai12: combinational[a] = a csc0' + [1]; # gate sr_nor: asynch[3] = csc1'; # gate inv: combinational[4] = csc0' csc2' [3]'; # gate nor3: combinational[5] = [4]' (csc1' + R'); # gate aoi12: combinational[R] = [5]'; # gate inv: combinational[7] = (csc2' + a') (csc0' + A'); # gate aoi22: combinational[8] = csc0'; # gate inv: combinational[csc0] = [8]' csc1' + [7]'; # gate oai12: combinational[csc1] = A' (csc0 + csc1); # gate rs_nor: asynch[11] = R'; # gate inv: combinational[12] = csc0' ([11]' + csc1'); # gate aoi12: combinational[csc2] = [12] (r' + csc2) + r' csc2; # gate c_element1:asynch

© 2003-2009 Ran Ginosar 048878 Lecture 4: Speed-Independent Control Circuits 51
The Synthesized Gen-C Circuit
INORDER = r A a R csc0 csc1 csc2;OUTORDER = [a] [R] [csc0] [csc1] [csc2];[0] = csc0' csc1 (R' + A); [1] = csc0 csc2 (a + r); [2] = csc2' A; [R] = R [2]' + [1]; # mappable onto gC[4] = a csc1 csc2'; [csc0] = csc0 [4]' + csc2; # mappable onto gC[6] = r' csc0; [csc1] = csc1 r' + [6]; # mappable onto gC[8] = A' csc0' (csc1' + a'); [csc2] = csc2 R' + [8]; # mappable onto gC[a] = a [0]' + csc1'; # mappable onto gC

© 2003-2009 Ran Ginosar 048878 Lecture 4: Speed-Independent Control Circuits 52
Petrify Environment
STG
EQNdraw_astg
ps
write_sg
SG
libpetrify

© 2003-2009 Ran Ginosar 048878 Lecture 4: Speed-Independent Control Circuits 53
Petrify• Command line tool• petrify –h for help (flags etc.)• petrify –cg for complex gates• petrify –gc for generalized C-elements• petrify –tm for tech mapping• draw_astg to draw• write_sg to create state graphs
• Documented on line, incl. tutorial – See
www.lsi.upc.edu/~jordicf/petrify/home.html

© 2003-2009 Ran Ginosar 048878 Lecture 4: Speed-Independent Control Circuits 54
Technical notes on Petrify• Have or install cygwin on Windows
– http://cygwin.com/
• Download dot.exe
– Linked from the petrify site
• Include the bin dir in your path
– In .bash_profile in the cygwin home dir. For example:export CLASSPATH=.export PATH=/cygdrive/c/cygwin/home/ran/petrify-4.2/bin:$PATH
• To draw_astg:draw_astg –Tdot file.g –o file.dotdot –Tps file.dot –o file.ps

© 2003-2009 Ran Ginosar 048878 Lecture 4: Speed-Independent Control Circuits 55
A safer STG?
ack-
req+
ack+
req-
ACK-
REQ+
ACK+
REQ-

© 2003-2009 Ran Ginosar 048878 Lecture 4: Speed-Independent Control Circuits 56
A safer STG?

© 2003-2009 Ran Ginosar 048878 Lecture 4: Speed-Independent Control Circuits 57
The safer STG is a serial circuit
INORDER = r A a R;
OUTORDER = [a] [R];
[a] = A;
[R] = r;
ack-
req+
ack+
req-
ACK-
REQ+
ACK+
REQ-
req
ack
REQ
ACK

© 2003-2009 Ran Ginosar 048878 Lecture 4: Speed-Independent Control Circuits 58
Yet another STG?
ack-
req+
ack+
req-
ACK-
REQ+
ACK+
REQ-

© 2003-2009 Ran Ginosar 048878 Lecture 4: Speed-Independent Control Circuits 59
Yet another STG?

© 2003-2009 Ran Ginosar 048878 Lecture 4: Speed-Independent Control Circuits 60

© 2003-2009 Ran Ginosar 048878 Lecture 4: Speed-Independent Control Circuits 61
Output Handshake First
ack-
req+
ack+
req-
ACK-
REQ+
ACK+
REQ-

© 2003-2009 Ran Ginosar 048878 Lecture 4: Speed-Independent Control Circuits 62
Still a serial controller
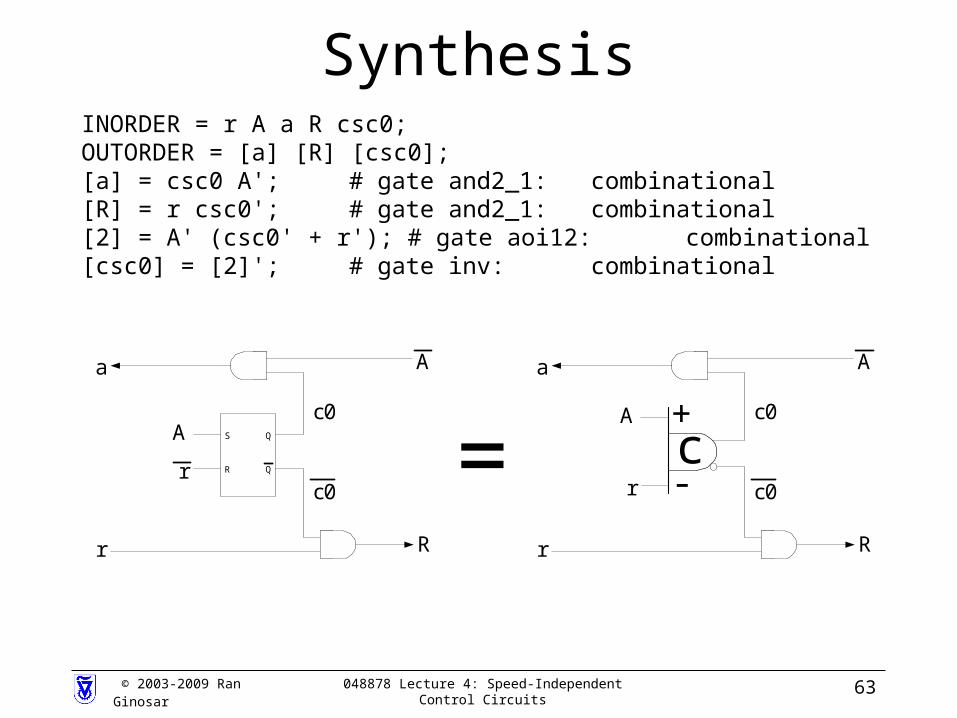
© 2003-2009 Ran Ginosar 048878 Lecture 4: Speed-Independent Control Circuits 63
SynthesisINORDER = r A a R csc0;OUTORDER = [a] [R] [csc0];[a] = csc0 A'; # gate and2_1: combinational[R] = r csc0'; # gate and2_1: combinational[2] = A' (csc0' + r'); # gate aoi12:
combinational[csc0] = [2]'; # gate inv: combinational
A
r
c0S
R
Q
Q
Aa
r R
c0
cA
r
c0
Aa
r R
c0
+
-=
© 2003-2009 Ran Ginosar 048878 Lecture 4: Speed-Independent Control Circuits 64
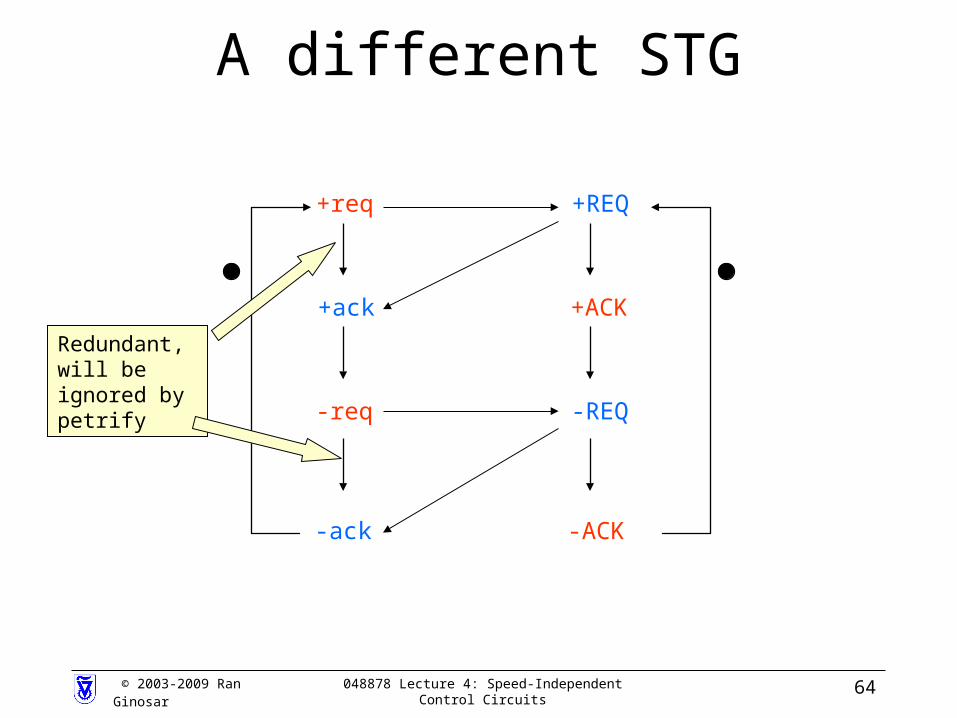
A different STG
ack-
req+
ack+
req-
ACK-
REQ+
ACK+
REQ-
Redundant, will be ignored by petrify

© 2003-2009 Ran Ginosar 048878 Lecture 4: Speed-Independent Control Circuits 65
A different STG

© 2003-2009 Ran Ginosar 048878 Lecture 4: Speed-Independent Control Circuits 66
SynthesisINORDER = r A a R;OUTORDER = [a] [R];[a] = R; [1] = r A'; [2] = r' A; [R] = R [2]' + [1]; # mappable onto gCR = R(Ar’)’+A’r = R(A’+r)+A’r = A’r + RA’ +Rr
A
r Rca

© 2003-2009 Ran Ginosar 048878 Lecture 4: Speed-Independent Control Circuits 67
Latch Control
req
ack
REQ
ACK
req
ack
REQ
ACK
Enable
Data-less fifo:
Latch:Lt
Enable=0:transparent

© 2003-2009 Ran Ginosar 048878 Lecture 4: Speed-Independent Control Circuits 68
Constraints on sequence of events• Must keep input data available until
after it is latched
• Assume input data available only when req=1
• Once ack+, req- (and input data invalid) can follow very fast
• Lt+ before ack+

© 2003-2009 Ran Ginosar 048878 Lecture 4: Speed-Independent Control Circuits 69
Latch Control: STG Fragments
ack-
req+
ack+
req-
ACK-
REQ+
ACK+
REQ-
req+ ACK-
REQ+
Lt+
ack+
req- ACK+
REQ-
Lt-
ack-

© 2003-2009 Ran Ginosar 048878 Lecture 4: Speed-Independent Control Circuits 70
Latch Control: Combined STG
ack-
req+
ack+
req-
ACK-
REQ+
ACK+
REQ-
Lt+
Lt-

© 2003-2009 Ran Ginosar 048878 Lecture 4: Speed-Independent Control Circuits 71
Latch Control: Combined STG

© 2003-2009 Ran Ginosar 048878 Lecture 4: Speed-Independent Control Circuits 72

© 2003-2009 Ran Ginosar 048878 Lecture 4: Speed-Independent Control Circuits 73
INORDER = Rin Aout Ain Rout Lt;OUTORDER = [Ain] [Rout] [Lt];[Ain] = Lt; [1] = Aout' Rin; [2] = Aout Rin'; [Rout] = Rout [2]' + [1]; # mappable onto gC[Lt] = Rout; R = R(Ar’)’+A’r = R(A’+r)+A’r = A’r + RA’ +Rr
A
r Rc
Lt
a

© 2003-2009 Ran Ginosar 048878 Lecture 4: Speed-Independent Control Circuits 74
MUX Control• So far all examples are doable “by hand”
• A deceptively simple example:Control for 4-phase bundled data mux
PUSHchannels

© 2003-2009 Ran Ginosar 048878 Lecture 4: Speed-Independent Control Circuits 75
4-phase Bundled-data Mux• We have already drawn this (dual-rail control):
yz
x
y zx
ctl.tctl.f
y-ackz-ack
x-ack
y-req
z-req
x-req
C
C
ctl
0
1
C
Cctl.f
ctl.t
ctl-ack
Easier to start with the dual-rail control
© 2003-2009 Ran Ginosar 048878 Lecture 4: Speed-Independent Control Circuits 76
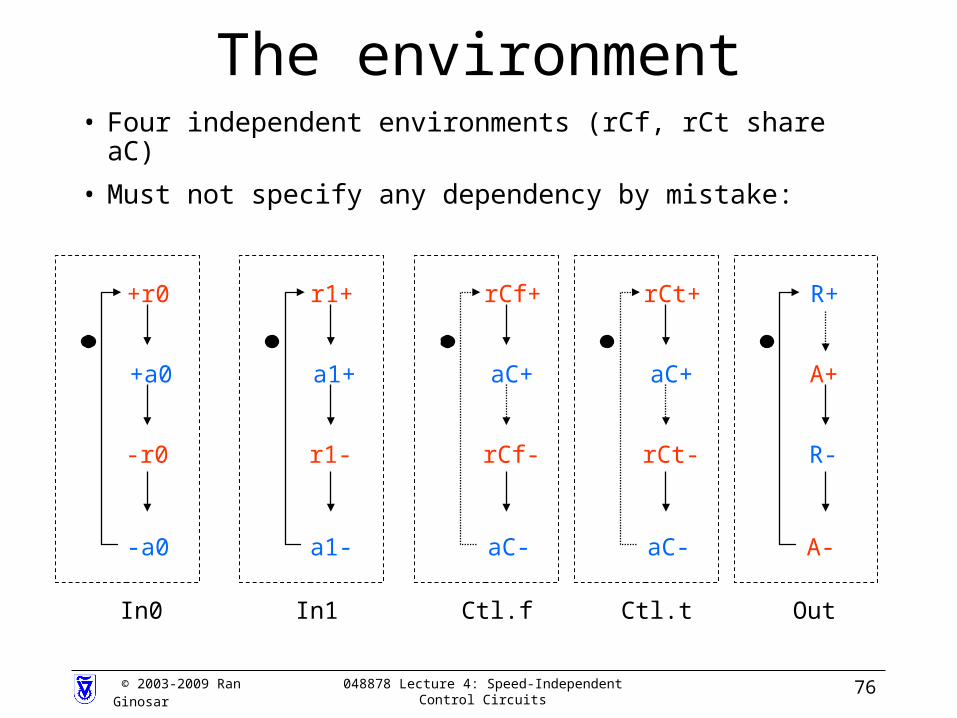
The environment• Four independent environments (rCf, rCt share aC)
• Must not specify any dependency by mistake:
a0-
r0+
a0+
r0-
a1-
r1+
a1+
r1-
aC-
rCf+
aC+
rCf-
A-
R+
A+
R-
In0 In1 Ctl.f Out
aC-
rCt+
aC+
rCt-
Ctl.t

© 2003-2009 Ran Ginosar 048878 Lecture 4: Speed-Independent Control Circuits 77
The control
• A+ must precede a0+ or a1+ (make sure data passed through and were captured)
• In0 and In1 handshakes must be made MUTEX
• Choices are matches with Merges

© 2003-2009 Ran Ginosar 048878 Lecture 4: Speed-Independent Control Circuits 78
a0+
a1+
r0+
A+
rCf+
rCt+
aC-
r1+
R+
Input Free Choice
P3 P1 aC+ P2
rCf-
rCt-
P4
r0-
r1-
P5
Controlled Choice
Merge
Duplicate arrow

© 2003-2009 Ran Ginosar 048878 Lecture 4: Speed-Independent Control Circuits 79
mux.g

© 2003-2009 Ran Ginosar 048878 Lecture 4: Speed-Independent Control Circuits 80
mux.gc
• Replicated transitions: R+, R+/1
• Inserted state variable to retain In0 vs. In1 info

© 2003-2009 Ran Ginosar 048878 Lecture 4: Speed-Independent Control Circuits 81
“Compact” state graph
© 2003-2009 Ran Ginosar 048878 Lecture 4: Speed-Independent Control Circuits 82
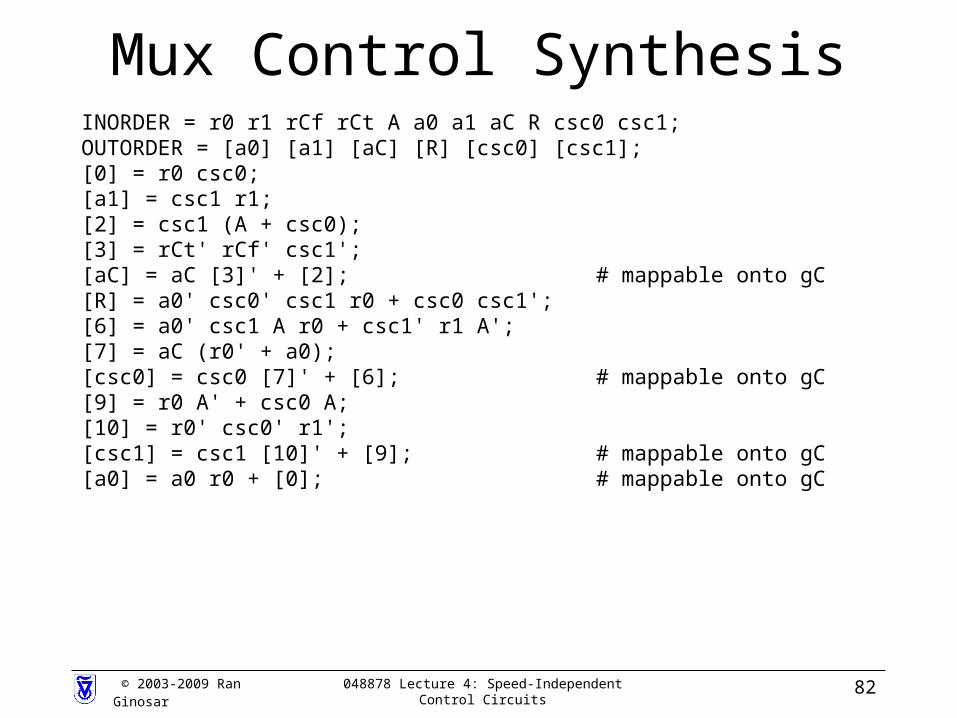
Mux Control SynthesisINORDER = r0 r1 rCf rCt A a0 a1 aC R csc0 csc1;OUTORDER = [a0] [a1] [aC] [R] [csc0] [csc1];[0] = r0 csc0; [a1] = csc1 r1; [2] = csc1 (A + csc0); [3] = rCt' rCf' csc1'; [aC] = aC [3]' + [2]; # mappable onto gC[R] = a0' csc0' csc1 r0 + csc0 csc1'; [6] = a0' csc1 A r0 + csc1' r1 A'; [7] = aC (r0' + a0); [csc0] = csc0 [7]' + [6]; # mappable onto gC[9] = r0 A' + csc0 A; [10] = r0' csc0' r1'; [csc1] = csc1 [10]' + [9]; # mappable onto gC[a0] = a0 r0 + [0]; # mappable onto gC

© 2003-2009 Ran Ginosar 048878 Lecture 4: Speed-Independent Control Circuits 83
Another Mux (4p ctl, bd) (Fig 6.24)

© 2003-2009 Ran Ginosar 048878 Lecture 4: Speed-Independent Control Circuits 84
SG for the Fig 6.24 mux
© 2003-2009 Ran Ginosar 048878 Lecture 4: Speed-Independent Control Circuits 85
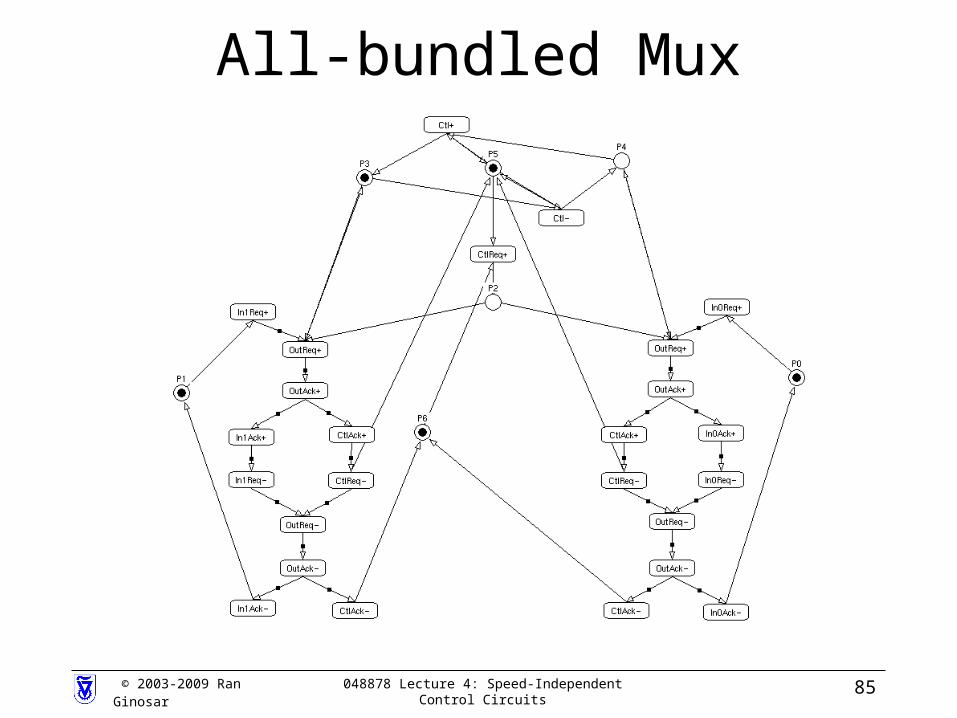
All-bundled Mux

© 2003-2009 Ran Ginosar 048878 Lecture 4: Speed-Independent Control Circuits 86
All-bundled Mux SynthesisINORDER = In0Req OutAck In1Req Ctl CtlReq In1Ack In0Ack OutReq
CtlAck csc0;OUTORDER = [In1Ack] [In0Ack] [OutReq] [CtlAck] [csc0];[In1Ack] = OutAck csc0'; [In0Ack] = OutAck csc0; [2] = CtlReq (In1Req csc0' + In0Req Ctl'); [3] = CtlReq' (In1Req' csc0' + In0Req' csc0); [OutReq] = OutReq [3]' + [2]; # mappable onto gC[5] = OutAck' csc0; [CtlAck] = CtlAck [5]' + OutAck; # mappable onto gC[7] = OutAck' CtlReq'; [8] = CtlReq Ctl; [csc0] = csc0 [8]' + [7]; # mappable onto gC

© 2003-2009 Ran Ginosar 048878 Lecture 4: Speed-Independent Control Circuits 87
Reduced concurrency mux

© 2003-2009 Ran Ginosar 048878 Lecture 4: Speed-Independent Control Circuits 88
A simple filter: specification
y := 0;loop x := READ (IN); WRITE (OUT, (x+y)/2); y := x;end loop
RinAin
Aout Rout
ININ
OUTOUT
filter
Following slides borrowed from Jordi Cortadella, UPC

© 2003-2009 Ran Ginosar 048878 Lecture 4: Speed-Independent Control Circuits 89
A simple filter: block diagram
x y+
controlRin
Ain
Rout
Aout
Rx AxRy Ay Ra Aa
ININOUTOUT
• x and y are level-sensitive latches (transparent when R=1)• + is a bundled-data adder (matched delay between Ra and Aa)• Rin indicates the validity of IN• After Ain+ the environment is allowed to change IN• (Rout,Aout) control a level-sensitive latch at the output

© 2003-2009 Ran Ginosar 048878 Lecture 4: Speed-Independent Control Circuits 90
A simple filter: control spec.
x y+
controlRin
Ain
Rout
Aout
Rx AxRy Ay Ra Aa
ININOUTOUT
Rin+
Ain+
Rin-
Ain-
Rx+
Ax+
Rx-
Ax-
Ry+
Ay+
Ry-
Ay-
Ra+
Aa+
Ra-
Aa-
Rout+
Aout+
Rout-
Aout-

© 2003-2009 Ran Ginosar 048878 Lecture 4: Speed-Independent Control Circuits 91
A simple filter: control impl.
Rin+
Ain+
Rin-
Ain-
Rx+
Ax+
Rx-
Ax-
Ry+
Ay+
Ry-
Ay-
Ra+
Aa+
Ra-
Aa-
Rout+
Aout+
Rout-
Aout-
C
Rin
Ain
Rx Ax RyAy AaRa
Aout
Rout

© 2003-2009 Ran Ginosar 048878 Lecture 4: Speed-Independent Control Circuits 92
Control: observable behavior
Rx+
Rin+
Ax+ Ra+ Aa+ Rout+ Aout+ z+ Rout- Aout- Ry+
Ry- Ay+Rx-Ax-Ay-
Ain-
Ain+
Ra-
Rin-
Aa-z-
C
Rin
Ain
Rx Ax RyAy AaRa
Aout
Rout
z

© 2003-2009 Ran Ginosar 048878 Lecture 4: Speed-Independent Control Circuits 93
Rx+
Rin+
Ax+ Ra+ Aa+ Rout+ Aout+ z+ Rout- Aout- Ry+
Ry- Ay+Rx-Ax-Ay-
Ain-
Ain+
Ra-
Rin-
Aa-z-
Rin+
Ain+
Rin-
Ain-
Rx+
Ax+
Rx-
Ax-
Ry+
Ay+
Ry-
Ay-
Ra+
Aa+
Ra-
Aa-
Rout+
Aout+
Rout-
Aout-
z+
z-
Backward Annotation

© 2003-2009 Ran Ginosar 048878 Lecture 4: Speed-Independent Control Circuits 94
Homework• Design an async controller and data path for
computing the Fibonacci series (fn=fn-1+fn-2, f0=f1=1). It starts with a Req and generates the sequence infinitely.
• Implement the controller with Petrify, using:
– Complex gates
– Generalized C elements
– SR latches
• Compare the three solutions. Decide which three comparison criteria to use
© 2003-2009 Ran Ginosar 048878 Lecture 4: Speed-Independent Control Circuits 95
Data Validity

© 2003-2009 Ran Ginosar 048878 Lecture 4: Speed-Independent Control Circuits 96
Four Channel Types

© 2003-2009 Ran Ginosar 048878 Lecture 4: Speed-Independent Control Circuits 97
2 phase protocols• When are the data valid?

© 2003-2009 Ran Ginosar 048878 Lecture 4: Speed-Independent Control Circuits 98
4 phase push protocols• Four different possibilities:

© 2003-2009 Ran Ginosar 048878 Lecture 4: Speed-Independent Control Circuits 99
Precharged CMOS Needs Extended-Early
• Input data valid during evaluate phase (REQ_IN=1)
REQ_IN
REQ_IN
REQ_IN
f
t
REQ_OUT?
From Lecture 6

© 2003-2009 Ran Ginosar 048878 Lecture 4: Speed-Independent Control Circuits 100
Hierarchical Order of Data Validity
• Broad can be used when any other type needed (etc.)
• Handshake-transparent circuits (function blocks):
– Strength(outputs) Strength(inputs)
• Latch:
– Strength(outputs) Strength(inputs)
BROAD
EXTENDED EARLY
EARLY LATEweak
strong

© 2003-2009 Ran Ginosar 048878 Lecture 4: Speed-Independent Control Circuits 101
Validity Example: Join• Extended early inputs, early outputs
ya-
yr+
ya+
yr-
za-
zr+
za+
zr-
xa-
xr+
xa+
xr-
y-ackz-ack
x-ack
Cy-reqz-req
x-req
y z1x z0
Why?

© 2003-2009 Ran Ginosar 048878 Lecture 4: Speed-Independent Control Circuits 102
Validity Example: Latch• Early inputs, extended early outputs
req
ack
REQ
ACK
Enable
Lt
Enable=0:transparent ack-
req+
ack+
req-
ACK-
REQ+
ACK+
REQ-
Lt+
Lt-

© 2003-2009 Ran Ginosar 048878 Lecture 4: Speed-Independent Control Circuits 103
4 phase pull protocols

© 2003-2009 Ran Ginosar 048878 Lecture 4: Speed-Independent Control Circuits 104
Latch Decoupling

© 2003-2009 Ran Ginosar 048878 Lecture 4: Speed-Independent Control Circuits 105
Simple Muller Pipeline with Latches
• Only half full (spread = 2)
• Stage i+1 must be empty before stage i can latch new data

© 2003-2009 Ran Ginosar 048878 Lecture 4: Speed-Independent Control Circuits 106
Decoupled Pipeline with Latches
• We need a new controller
• Want to get spread=1

© 2003-2009 Ran Ginosar 048878 Lecture 4: Speed-Independent Control Circuits 107
Latch Control Revisited
• Lt+ waits for REQ+
• REQ+ waits for previous ACK-
• Result: Next stage must be EMPTY before we can latch.
• Wish to decouple the two sides.
req
ack
REQ
ACK
Enable
Lt
Enable=0:transparent ack-
req+
ack+
req-
ACK-
REQ+
ACK+
REQ-
Lt+
Lt-

© 2003-2009 Ran Ginosar 048878 Lecture 4: Speed-Independent Control Circuits 108
ack-
req+
ack+
req-
ACK-
REQ+
ACK+
REQ-
Lt+
Lt-
Semi-Decoupled Latch Control
• All stages can be filled (spread=1)
– [Furber & Day (1996), Furber and Liu (1996)]
• But ack- waits for ACK+ may slow a pipeline
• Add a second state variable fully decouple input and output
ack-
req+
ack+
req-
ACK-
REQ+
ACK+
REQ-
A+
Lt+
A-
Lt-
EarlyInput
ExtendedEarlyoutput
EarlyInput
Earlyoutput

© 2003-2009 Ran Ginosar 048878 Lecture 4: Speed-Independent Control Circuits 109
Fully-Decoupled Latch Control
• ack- decoupled from ACK+
• But output validity too short – not good for holding data for function blocks
EarlyInput
ack-
req+
ack+
req-
ACK-
REQ+
ACK+
REQ-
A+
Lt+
A-
Lt-
B+
B-Earlyoutput
ack-
req+
ack+
req-
ACK-
REQ+
ACK+
REQ-
A+
Lt+
A-
Lt-
EarlyInput
Earlyoutput

© 2003-2009 Ran Ginosar 048878 Lecture 4: Speed-Independent Control Circuits 110
Broad Decoupled Latch Control
• Complex control decoupled pipeline latch
ack-
req+
ack+
req-
ACK-
REQ+
ACK+
REQ-
A+
Lt+
A-
Lt-
EarlyInput
Broadoutput
B+
B-EarlyInput
ack-
req+
ack+
req-
ACK-
REQ+
ACK+
REQ-
A+
Lt+
A-
Lt-
B+
B-Earlyoutput
© 2003-2009 Ran Ginosar 048878 Lecture 4: Speed-Independent Control Circuits 111
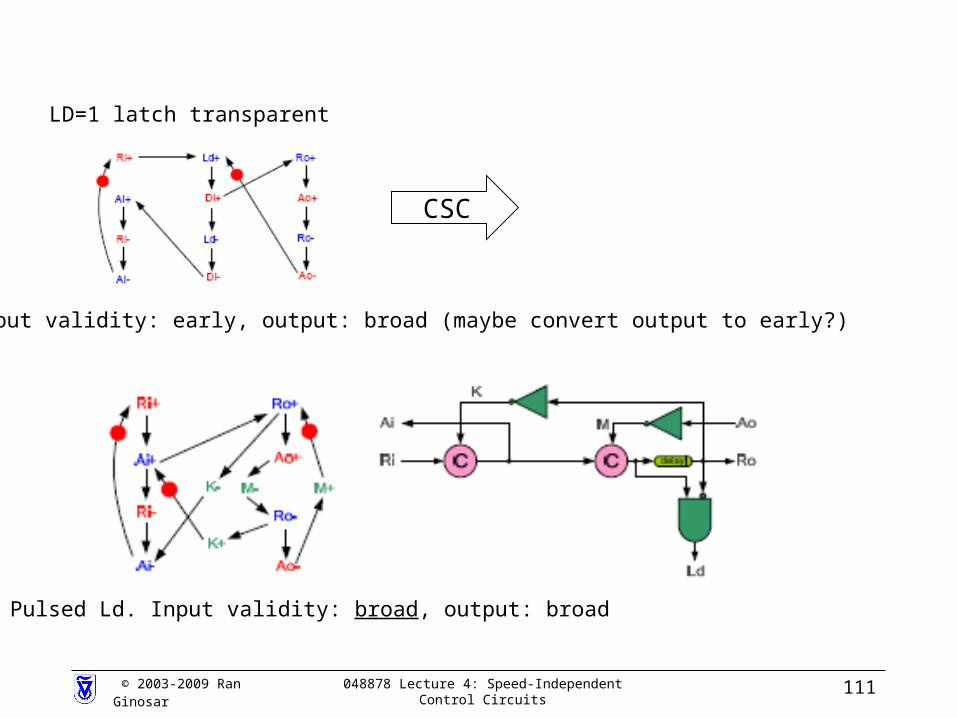
CSC
Input validity: early, output: broad (maybe convert output to early?)
LD=1 latch transparent
Pulsed Ld. Input validity: broad, output: broad

© 2003-2009 Ran Ginosar 048878 Lecture 4: Speed-Independent Control Circuits 112
Normally Opaque Latch Control
• Latch opens only when new data arrive [Sparso et al., 1998]
• Lt- REQ+ delay must be > Lt- data out delay
ack-
req+
ack+
req-
ACK-
REQ+
ACK+
REQ-
Lt-
A+
Lt+
A-
EarlyInput
Broad++output

© 2003-2009 Ran Ginosar 048878 Lecture 4: Speed-Independent Control Circuits 113
Normally Opaque Latch Control

© 2003-2009 Ran Ginosar 048878 Lecture 4: Speed-Independent Control Circuits 114
Doubly-Latched Pipeline
• “ultimate” decoupling
– [Branover (1998), Kol & Ginosar (1997)]
• Neighbor stages are fully independent
• Cost: 2 latches
CL CL CL
control
LM LS
control
LM LS
control
LM LS
Ro
Ri Ao
Ai
Ro
Ri
Ao
Ai
Ro
Ri
Ao
Ai

© 2003-2009 Ran Ginosar 048878 Lecture 4: Speed-Independent Control Circuits 115
Pipeline Schedule
A B
Task
1
Task
2
Task
3
A 1 1 2
B 2 1 1
A
B
1 2 3 4 5 6 7 8
A
B
1 2 3 4 5 6 7 8
A
B
1 2 3 4 5 6 7 8
1 2 3
1 2 3
1 2 3
1 2 3
1 2 3
1 2 3
synchronous
fully-decoupled
DLAP